clustering segmentation - rutgers university …soe.rutgers.edu/~meer/ugrad/cv16clustering.pdf ·...
TRANSCRIPT

The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own slides.
CLUSTERING SEGMENTATION

Basic ideas of grouping in human vision
• Figure-ground discrimination • Emergence
• Gestalt properties
Currently in computer vision we don't really take into account the top-down (from the "memory") grouping only the bottom-up part.

A series of factors affect whether elements should be grouped together. Difficult to translate into algorithms.
Gestalt properties Berlin School early 20th century
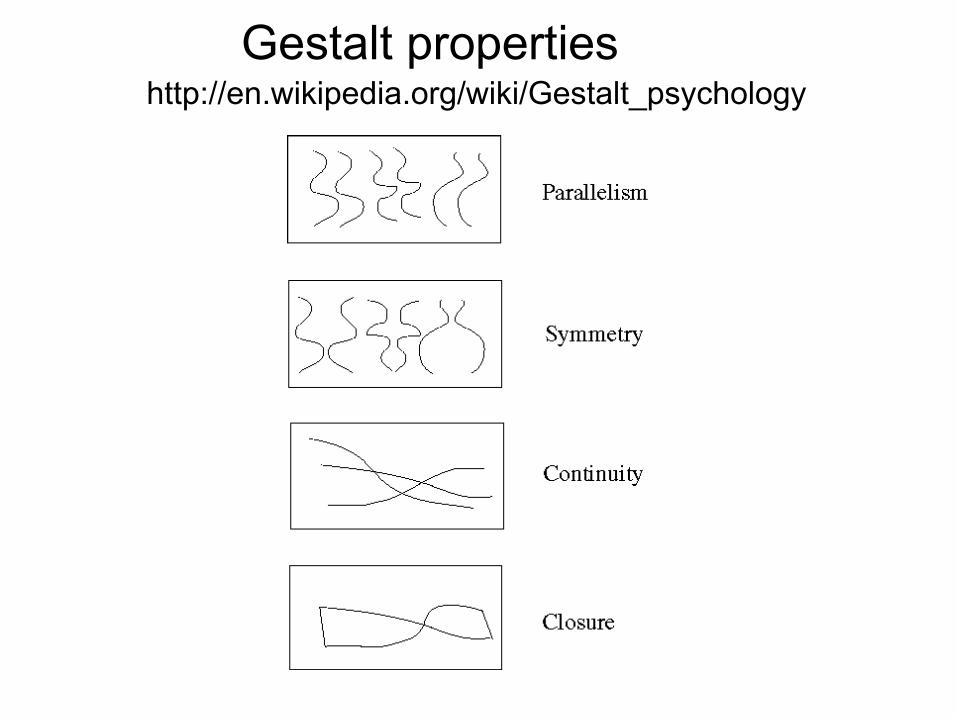
Gestalt properties http://en.wikipedia.org/wiki/Gestalt_psychology
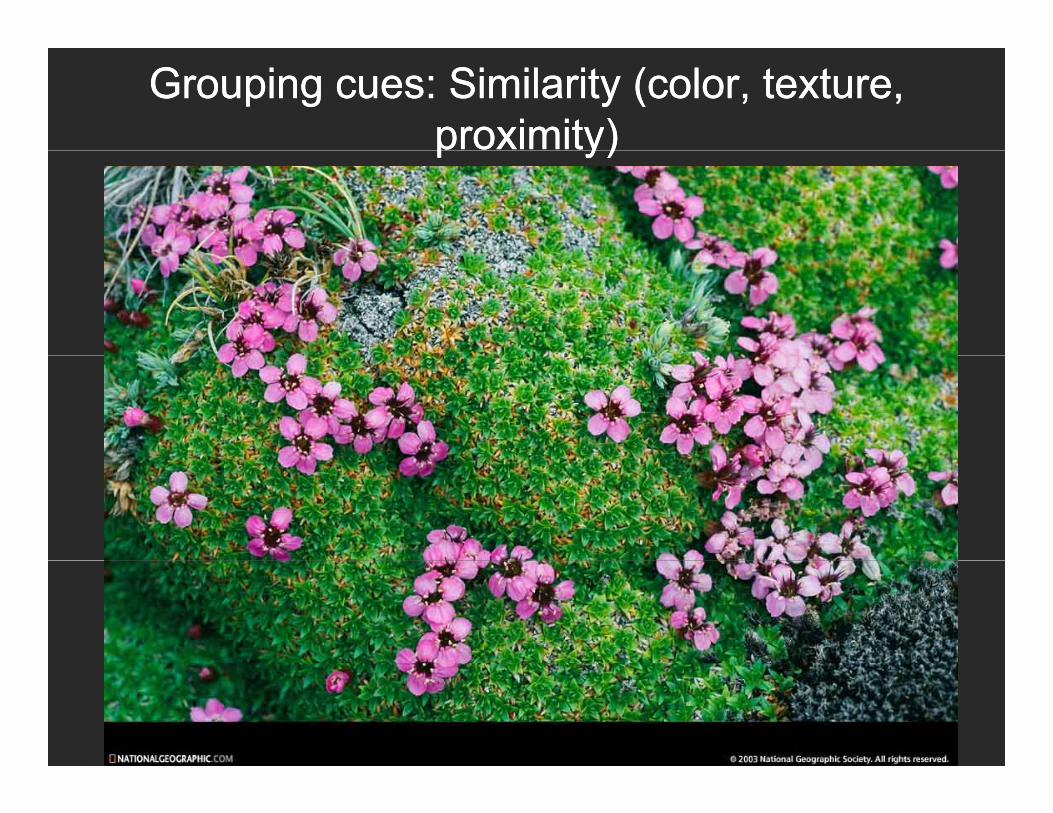
Grouping cues: Similarity (color, texture,Grouping cues: Similarity (color, texture,proximity)proximity)p y)p y)

Grouping cues: “Common fate”Grouping cues: “Common fate”
Image credit: Arthus-Bertrand (via F. Durand)
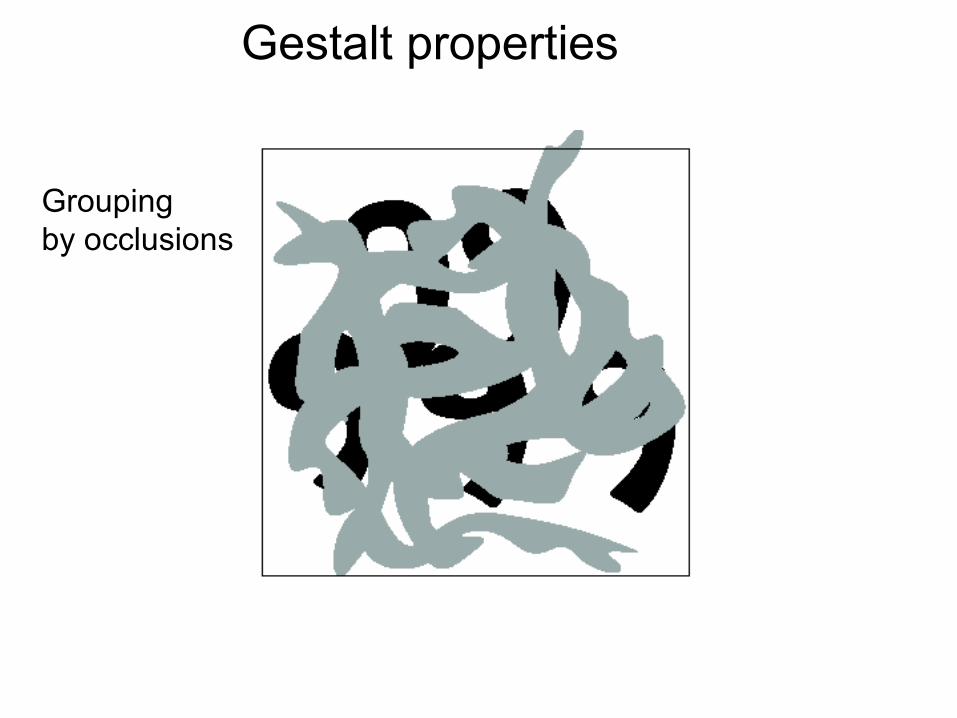
Gestalt properties
Grouping by occlusions
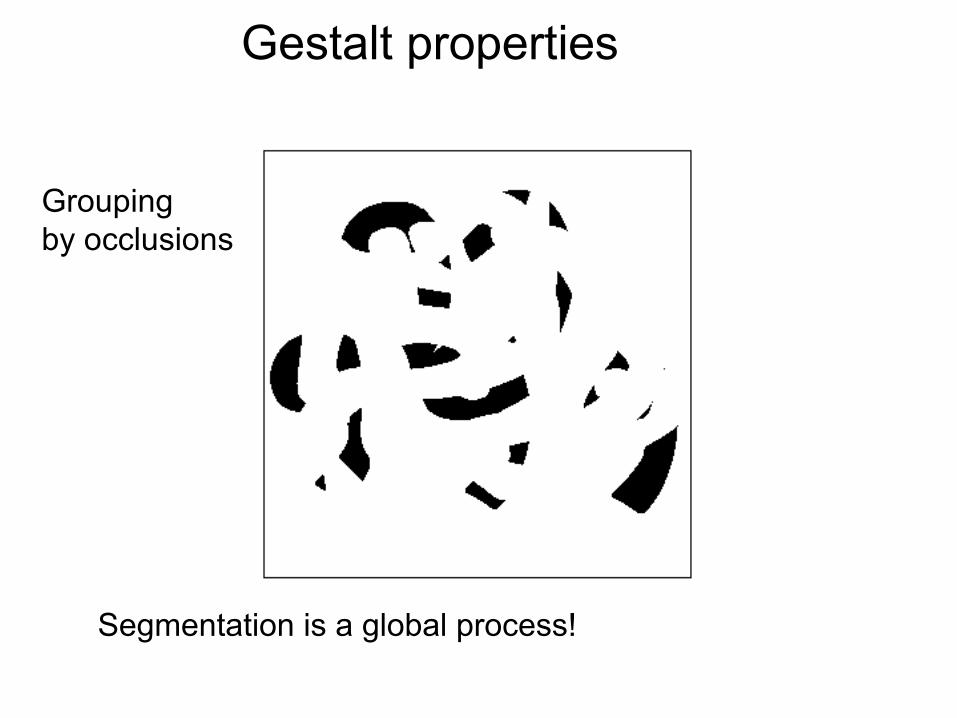
Gestalt properties
Grouping by occlusions
Segmentation is a global process!

Gestalt properties
Grouping by invisible completions
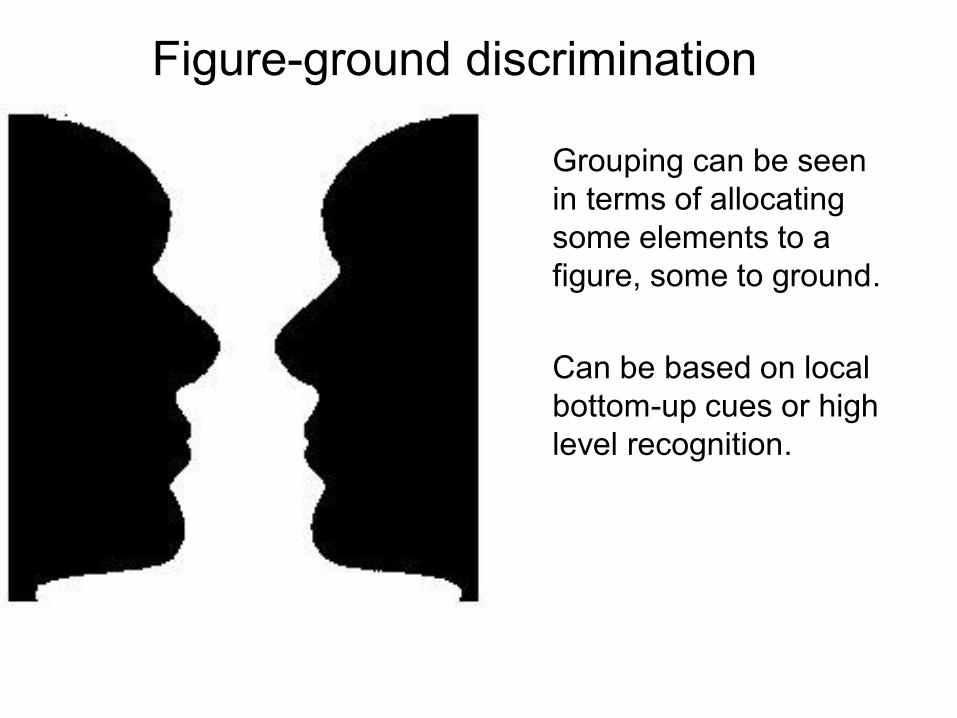
Grouping can be seen in terms of allocating some elements to a figure, some to ground.
Can be based on local bottom-up cues or high level recognition.
Figure-ground discrimination

Figure-ground discrimination

Emergence
1970s: R. C. James

2000s: Bev Doolittle
Emergence
Feature Space
• Every token is identified by a set of salient visual characteristics. For example: – Position – Color – Texture – Motion vector – Size, orientation (if token is larger than a pixel)
Slide credit: Christopher Rasmussen
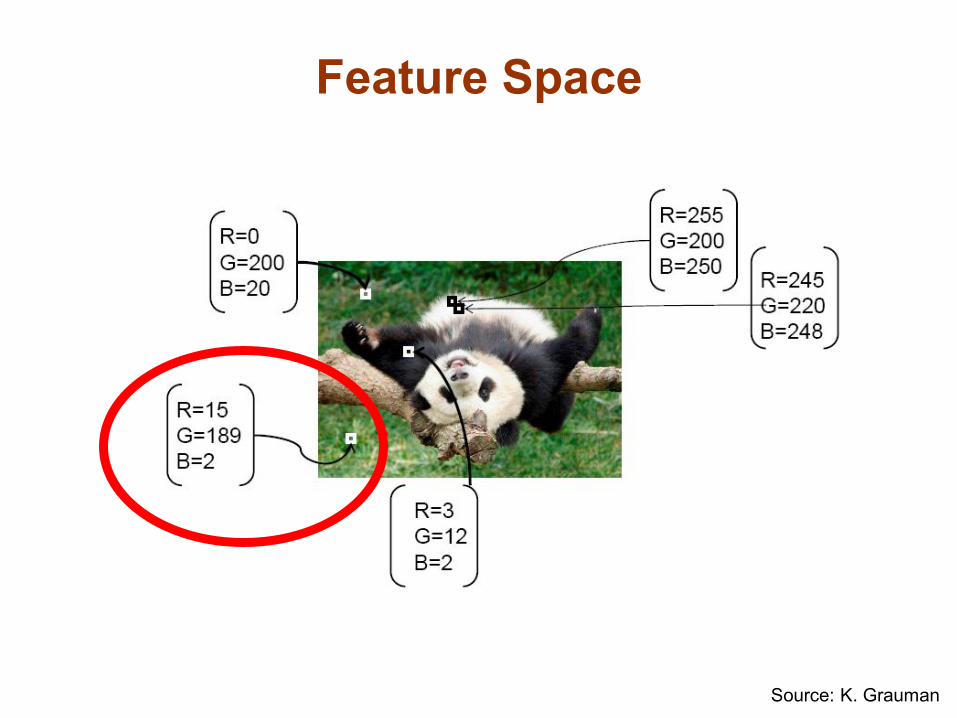
Source: K. Grauman
Feature Space

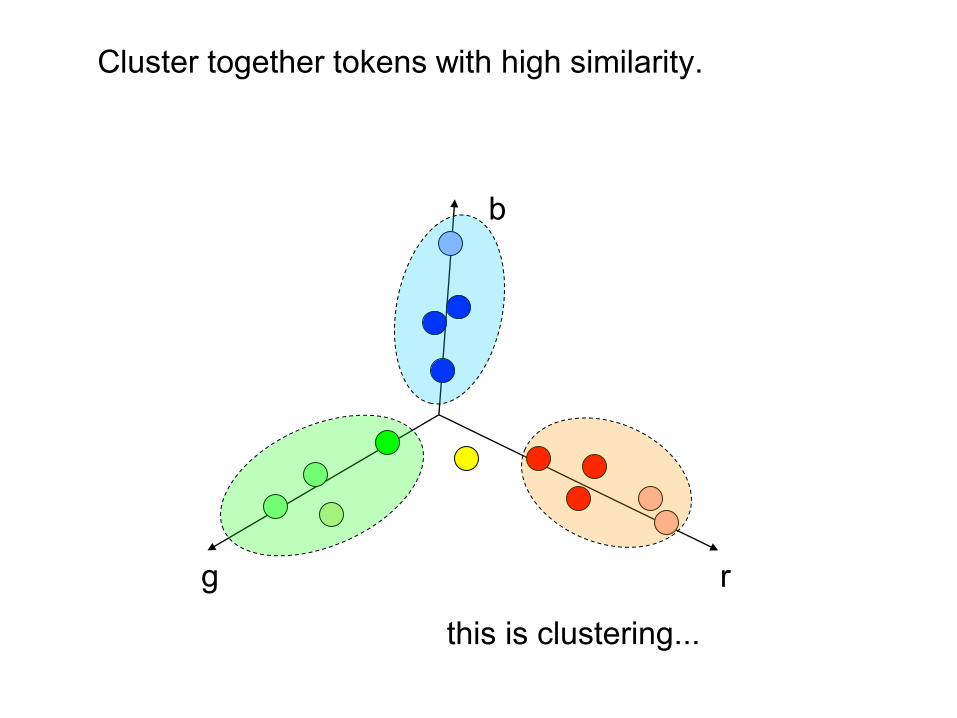
Feature space: each token is represented by a point.
r
b
g
r
b
g
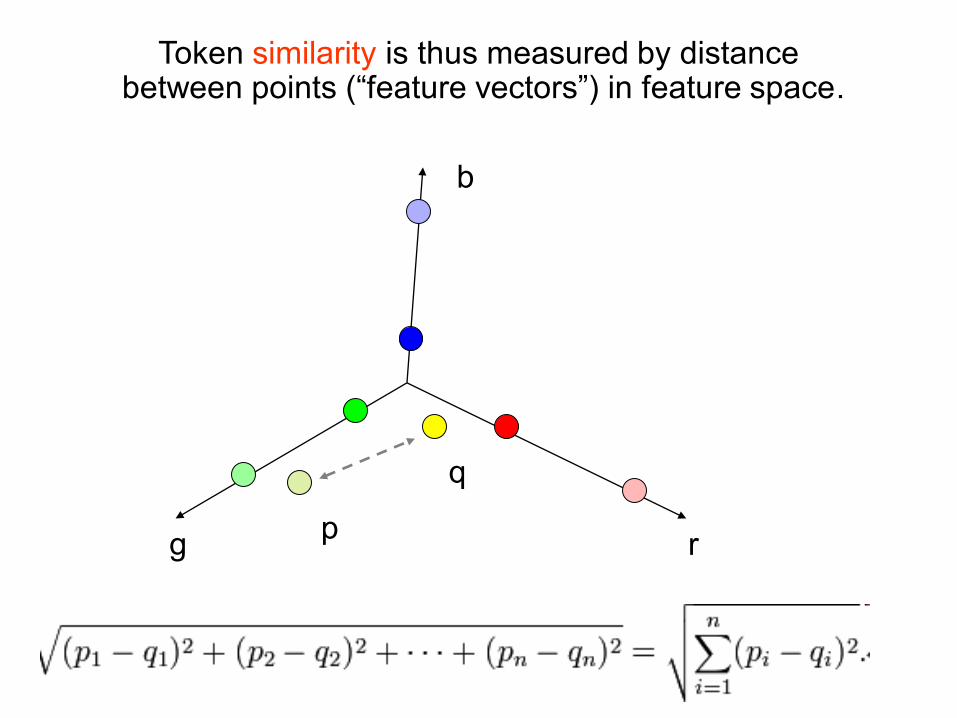
Token similarity is thus measured by distance between points (“feature vectors”) in feature space.
q
p
r
b
g
Cluster together tokens with high similarity.
this is clustering...
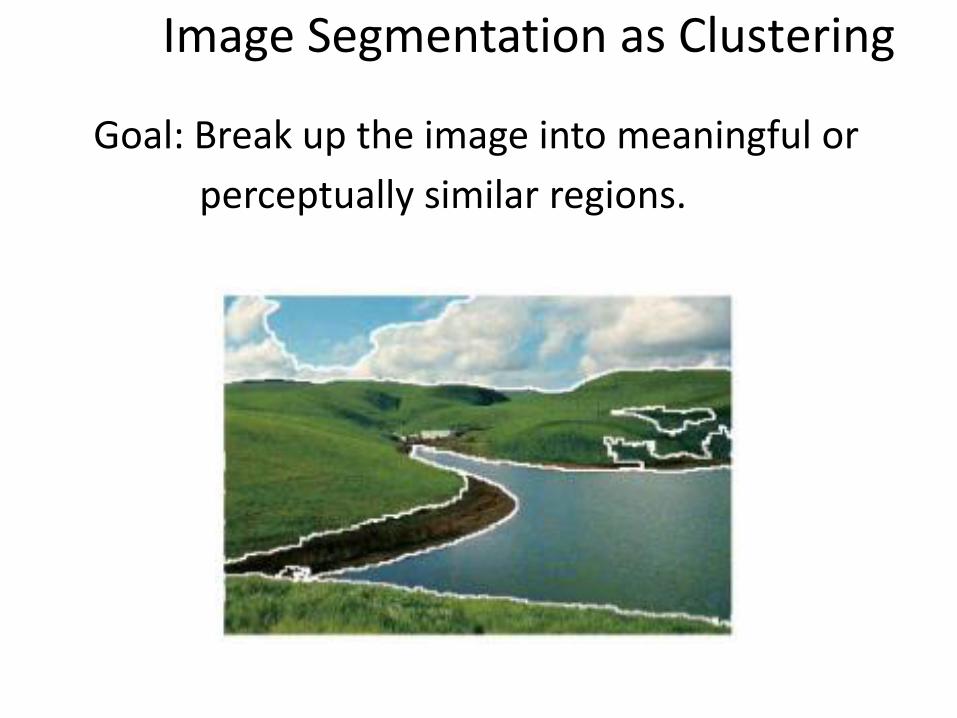
Image Segmentation as Clustering
Goal: Break up the image into meaningful or
perceptually similar regions.
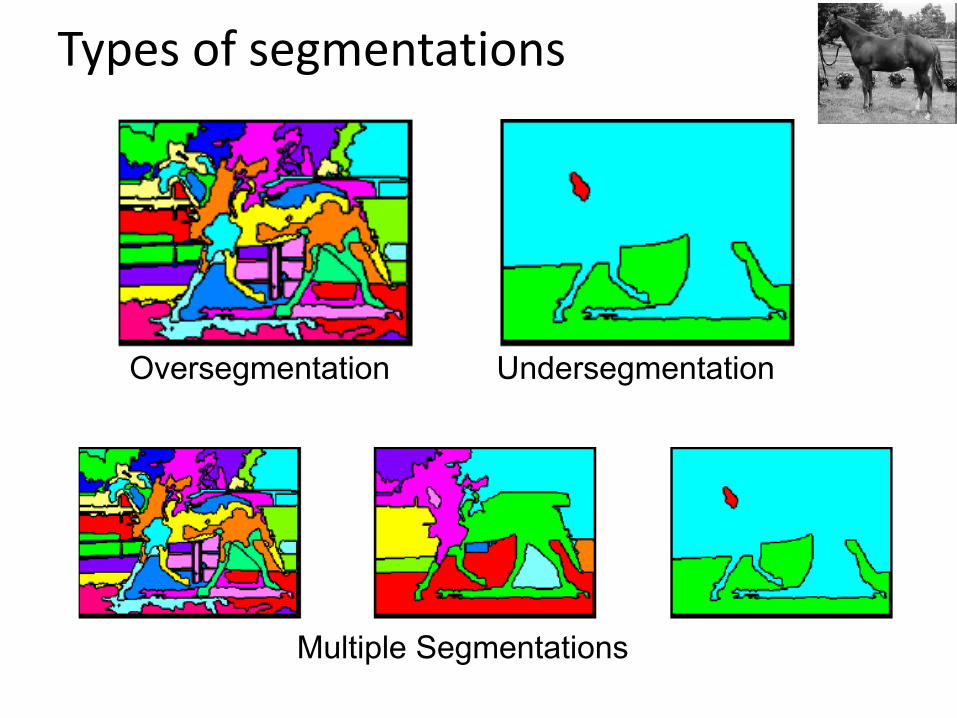
Types of segmentations
Oversegmentation Undersegmentation
Multiple Segmentations
Why do we cluster?
Summarizing large quantity of data in a few clusters with a few parameters. Each cluster can be used to predict if an unknown region becomes this cluster or not. Segmentation of an image (mainly those in 2D) can be achieved upto a decent estimate... usually.
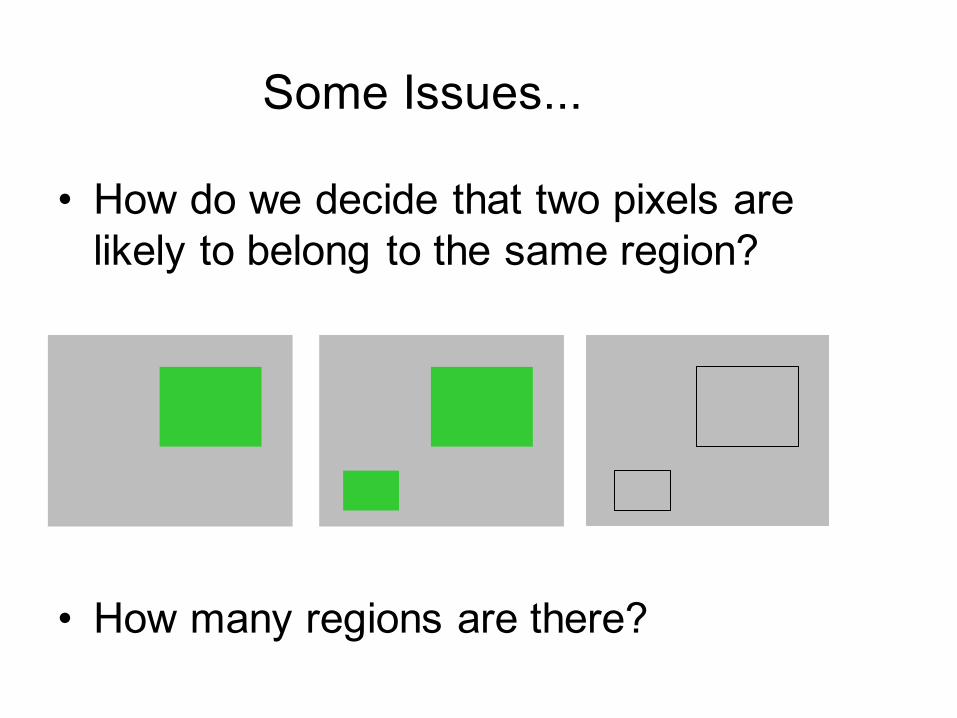
Some Issues...
• How do we decide that two pixels are likely to belong to the same region?
• How many regions are there?

Segmentation as clustering Cluster together tokens that share similar
visual characteristics.Will examine:
• K-mean • Mean-shift
Many other clustering methods exist, some using the graph structure of the image are also popular. But none of the clustering algorithm, as advancedas they are, can give a complete segmentationof the 3D reality in the 2D image.
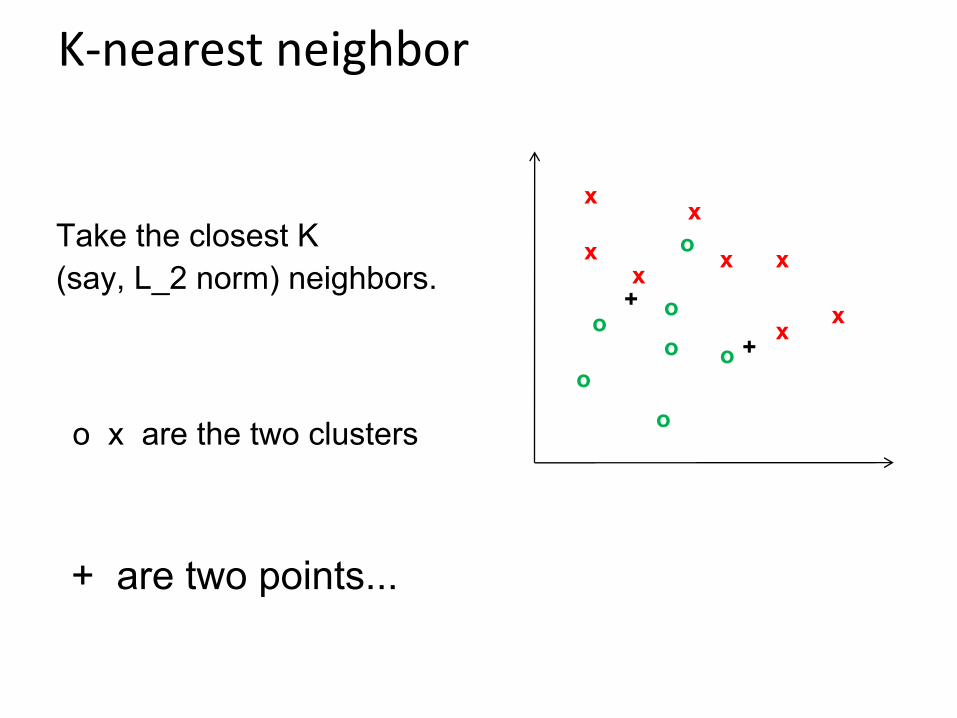
K-nearest neighbor
x x
x x
x
x x
x o
o o
o
o
o o
+
+
Take the closest K(say, L_2 norm) neighbors.
+ are two points...
o x are the two clusters
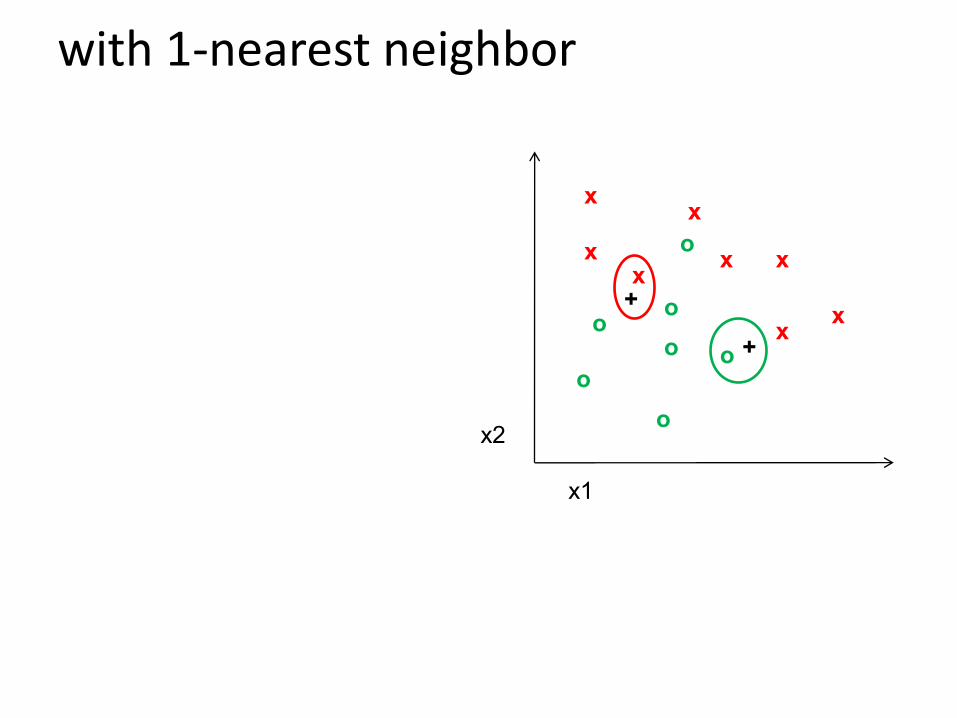
with 1-nearest neighbor
x x
x x
x
x x
x o
o o
o
o
o o
x2
x1
+
+
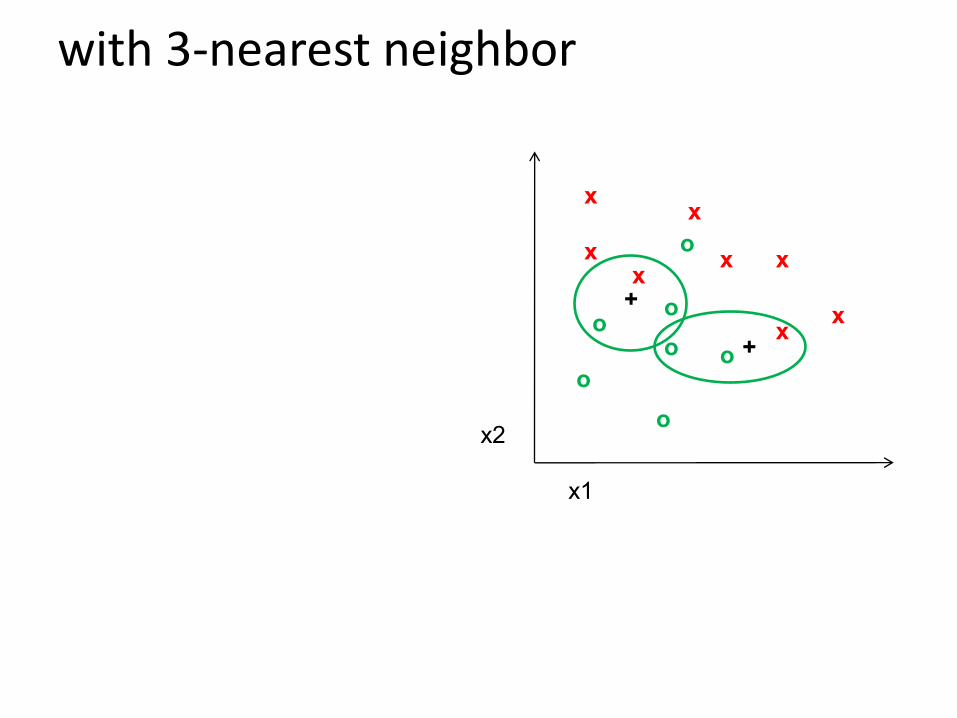
with 3-nearest neighbor
x x
x x
x
x x
x o
o o
o
o
o o
x2
x1
+
+
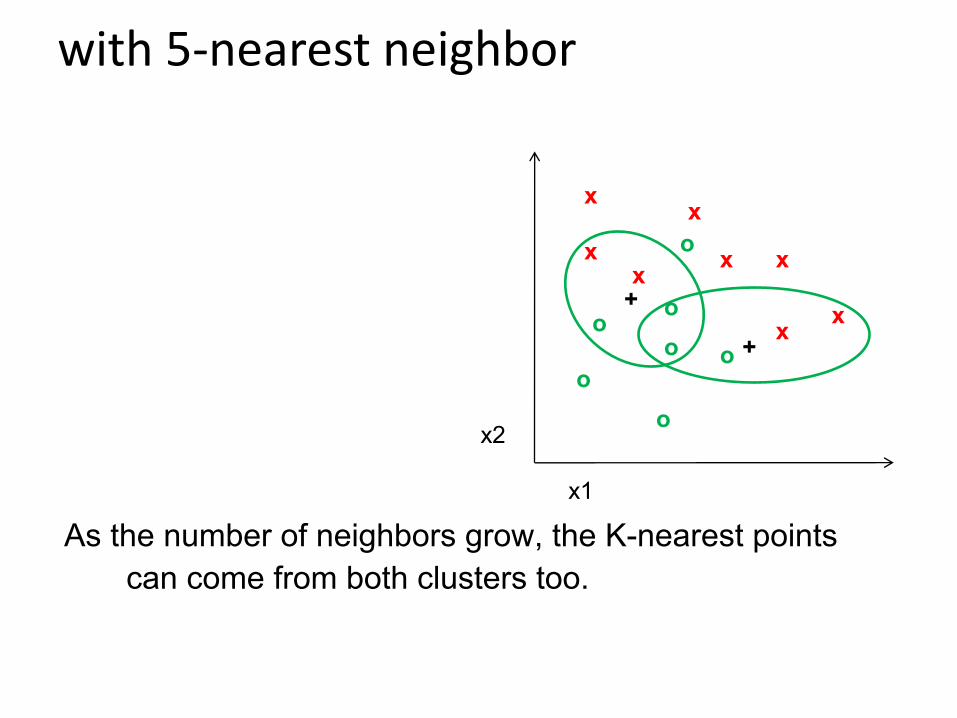
with 5-nearest neighbor
x x
x x
x
x x
x o
o o
o
o
o o
x2
x1
+
+
As the number of neighbors grow, the K-nearest points can come from both clusters too.

K-Means Clustering • Initialization:
Given K, number of clusters; N points in feature space. Pick K points randomly. These are initial cluster centers (means) 1, …, . Repeat the following:
Slide credit: Christopher Rasmussen
1. Assign each of the N points, xj , to clusters by nearest i.2. Recompute mean i of each cluster from its member points
3. If no mean has changed more than some , stop.
objective function
K
K
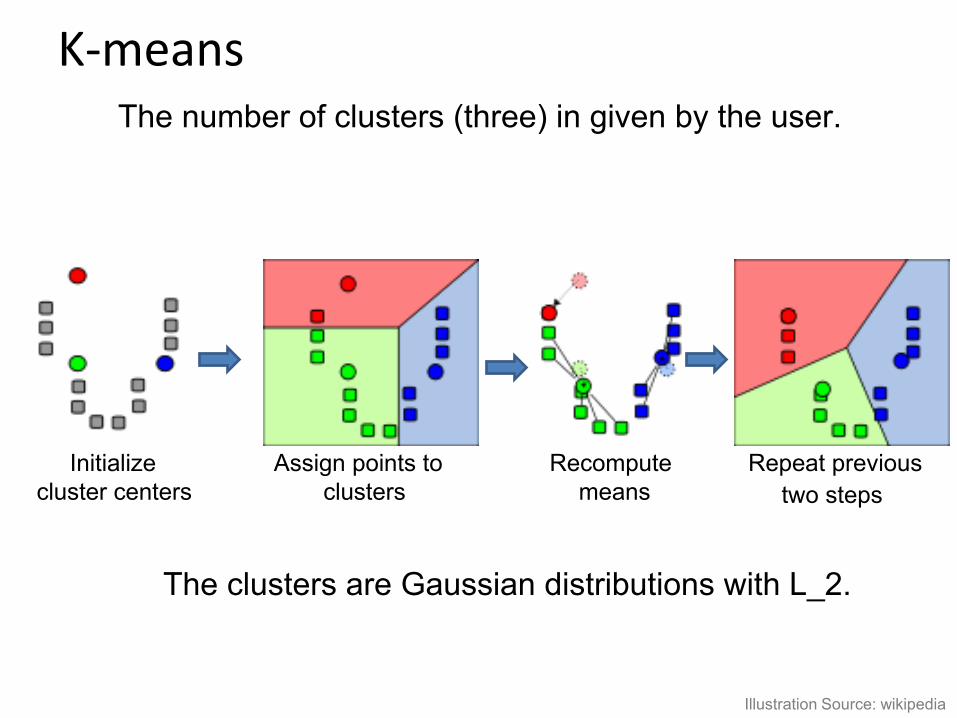
K-means
Illustration Source: wikipedia
Initialize cluster centers
Assign points to clusters
Recompute means
Repeat previous two steps
The number of clusters (three) in given by the user.
The clusters are Gaussian distributions with L_2.
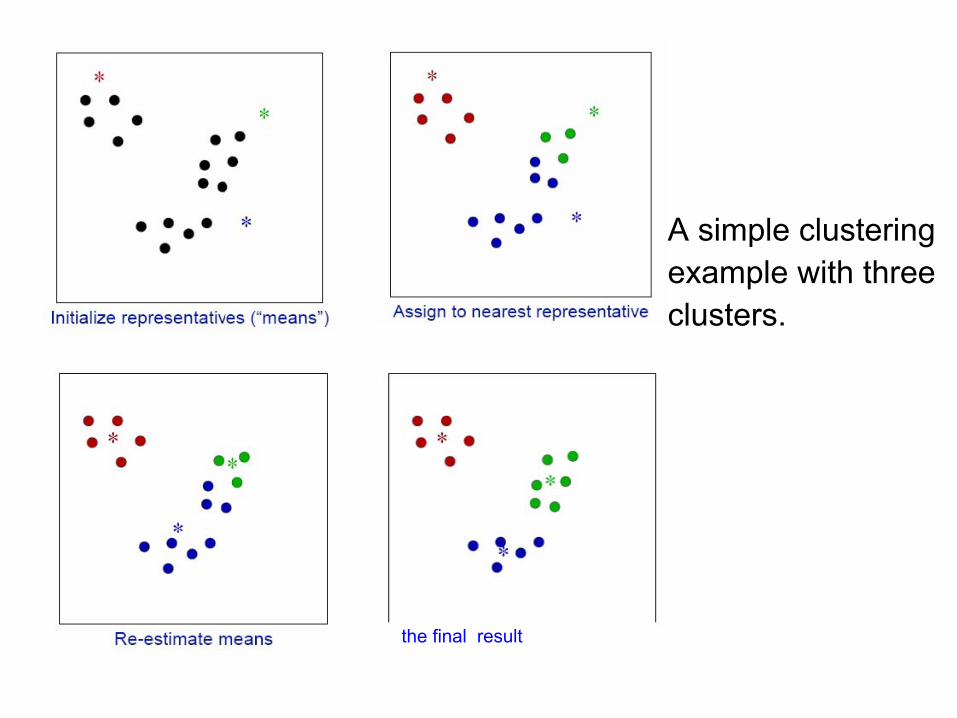
the final result
A simple clusteringexample with threeclusters.
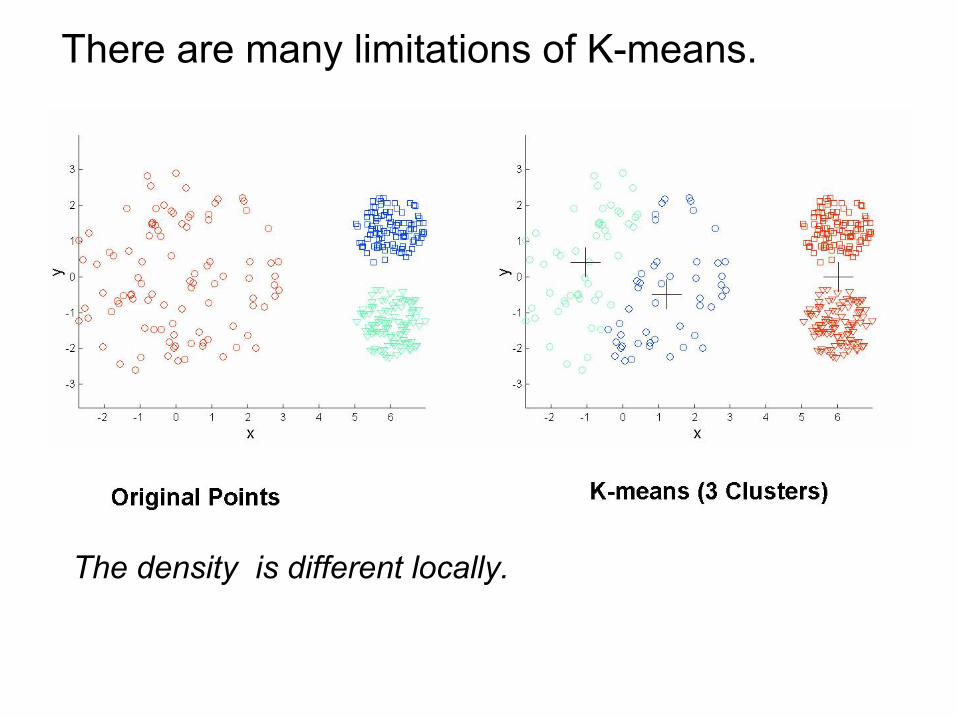
There are many limitations of K-means.
The density is different locally.
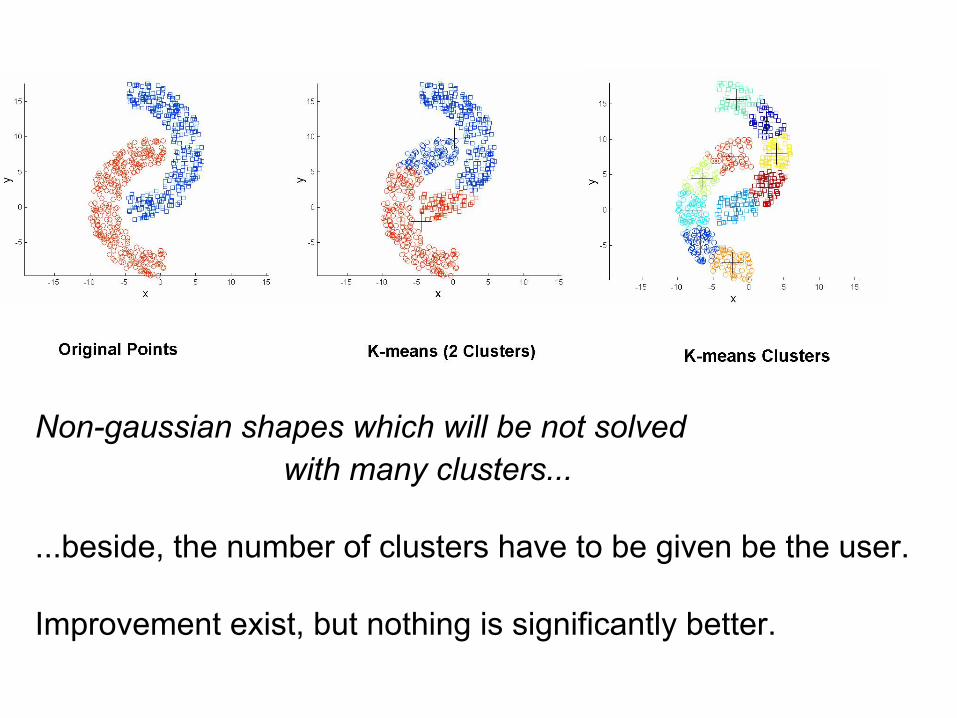
Non-gaussian shapes which will be not solved with many clusters...
...beside, the number of clusters have to be given be the user.
Improvement exist, but nothing is significantly better.

K-Means pros and cons
• Pros – Simple and fast. – Converges to a local minimum of the error function.
• Cons – Need to pick K. – Sensitive to initialization. – Only finds “spherical” clusters. – Sensitive to outliers.
Rarely used for segmentation.
adaptive?!
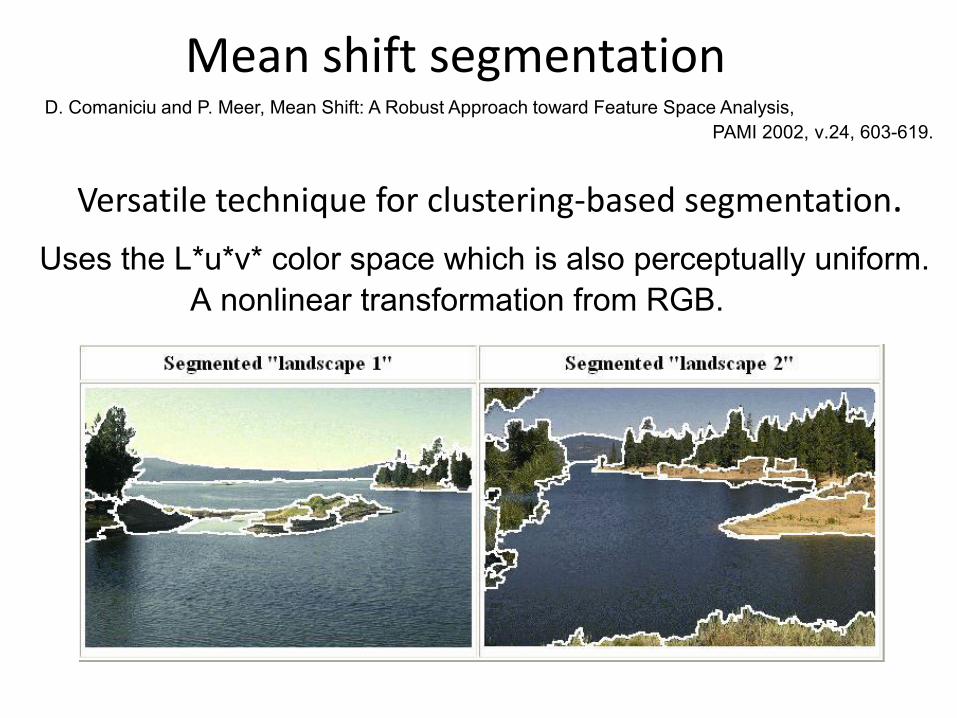
Versatile technique for clustering-based segmentation.
D. Comaniciu and P. Meer, Mean Shift: A Robust Approach toward Feature Space Analysis, PAMI 2002, v.24, 603-619.
Mean shift segmentation
Uses the L*u*v* color space which is also perceptually uniform. A nonlinear transformation from RGB.

Mean shift algorithm...
...try to find modes of this non-parametric density.

Kernel density estimation
Kernel density estimation function
K(x) > 0 only for ||x|| <= 1the bandwidth, h, has to be given by the user. The kernel is symmetric are depents on x . The Epanachikov kernel ~(1 - ||x|| )and the truncated Gaussian kernel
are used.
2
2

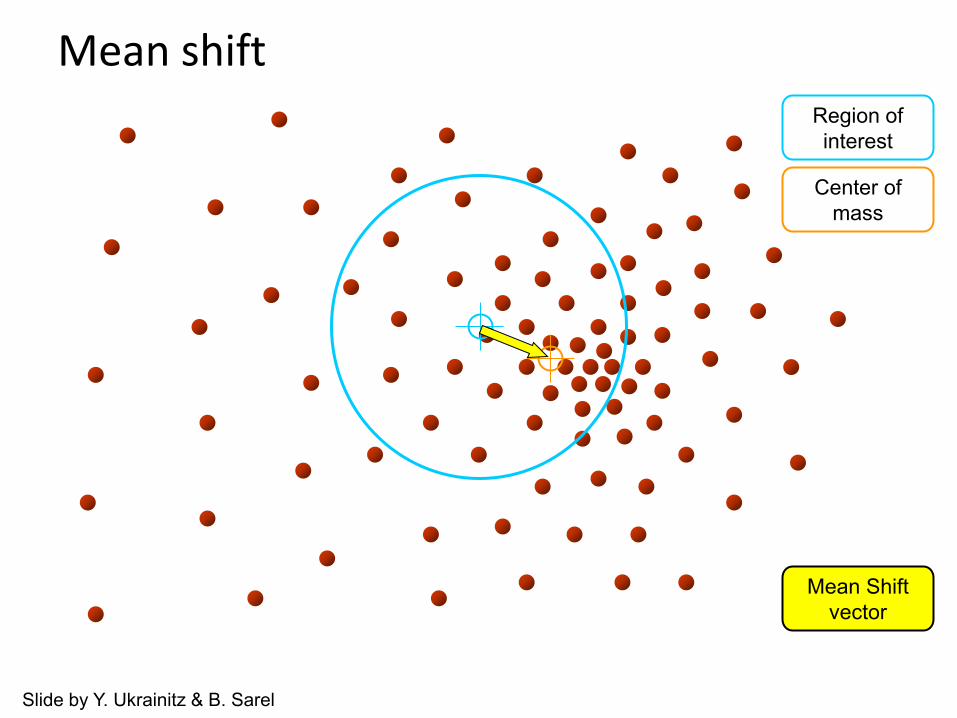
Region of interest
Center of mass
Mean Shift vector
Slide by Y. Ukrainitz & B. Sarel
Mean shift
Region of interest
Center of mass
Mean Shift vector
Slide by Y. Ukrainitz & B. Sarel
Mean shift

Region of interest
Center of mass
Mean Shift vector
Slide by Y. Ukrainitz & B. Sarel
Mean shift

Region of interest
Center of mass
Slide by Y. Ukrainitz & B. Sarel
Mean shift
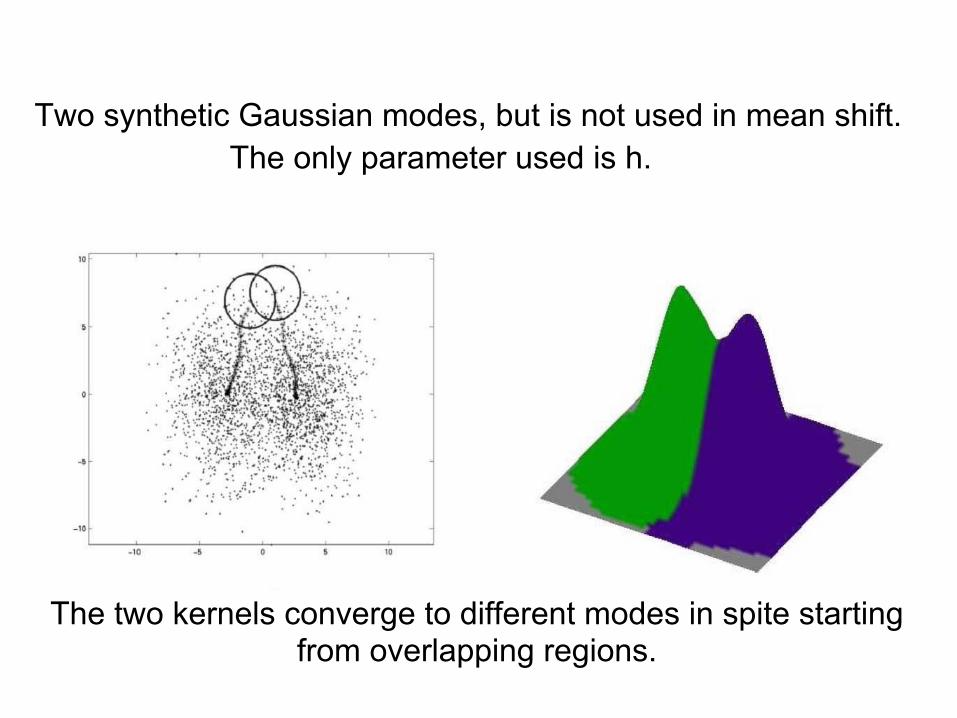
Two synthetic Gaussian modes, but is not used in mean shift. The only parameter used is h.
The two kernels converge to different modes in spite starting from overlapping regions.
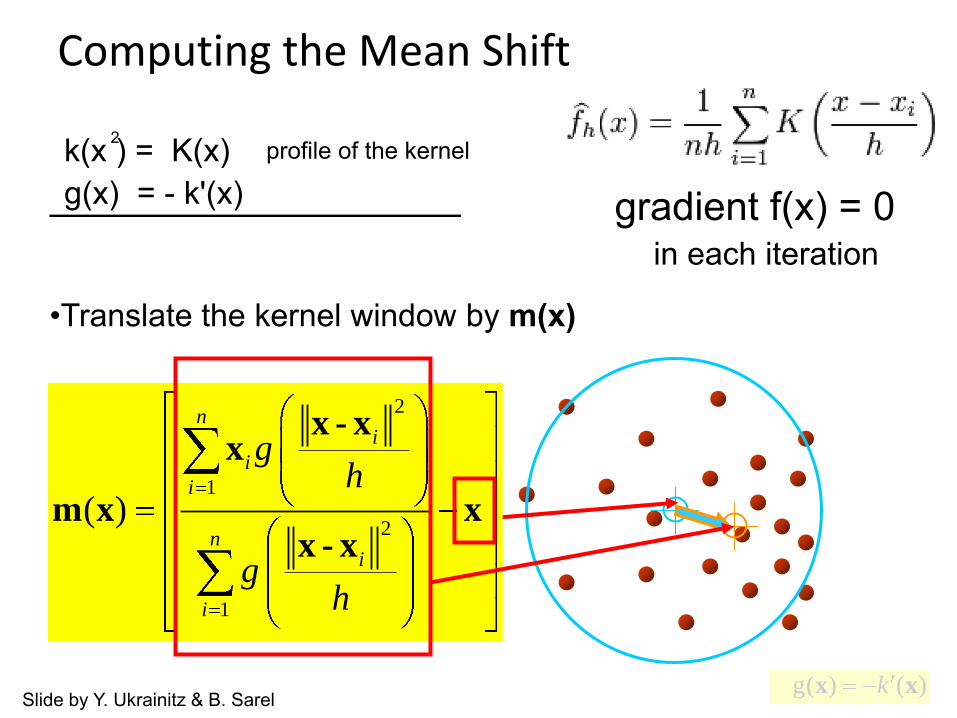
•Translate the kernel window by m(x)
2
1
2
1
( )
ni
i
i
ni
i
gh
gh
x - xx
m x xx - x
g( ) ( )kx x
Computing the Mean Shift
Slide by Y. Ukrainitz & B. Sarel
k(x ) = K(x)g(x) = - k'(x)
2 profile of the kernel
gradient f(x) = 0 in each iteration
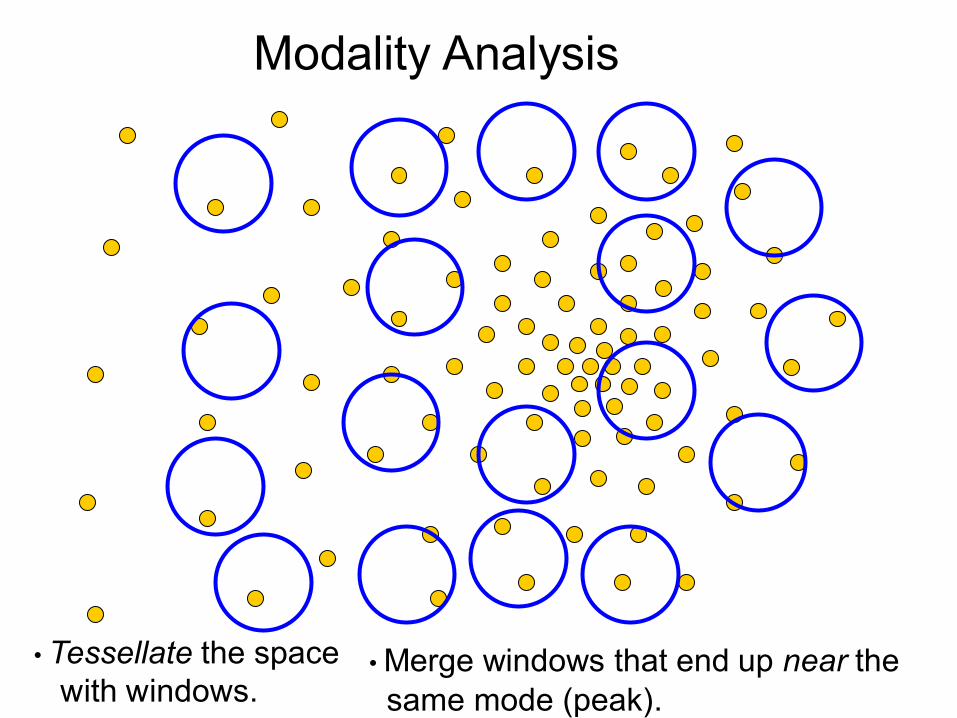
Modality Analysis
• Tessellate the space with windows.
• Merge windows that end up near the same mode (peak).

• !ǘǘNJŀŎǘƛƻƴ ōŀǎƛƴ: the region for which all trajectories lead to the same mode
• /ƭdzǎǘŜNJΥ all data points in the attraction basin of a mode
Slide by Y. Ukrainitz & B. Sarel
Attraction basin

Example: attraction basins
zero gradient, g(x)=0 but not a maximum stationary point eliminated by shifting a little bit the trajectory
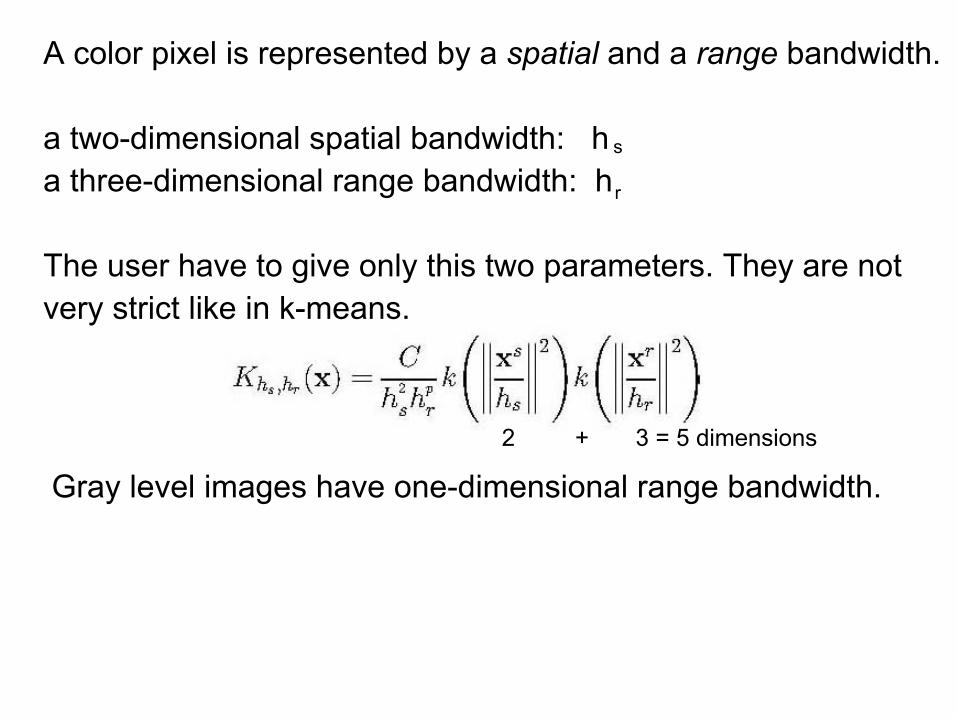
A color pixel is represented by a spatial and a range bandwidth. a two-dimensional spatial bandwidth: ha three-dimensional range bandwidth: h The user have to give only this two parameters. They are notvery strict like in k-means.
2 + 3 = 5 dimensions
Gray level images have one-dimensional range bandwidth.
s
r
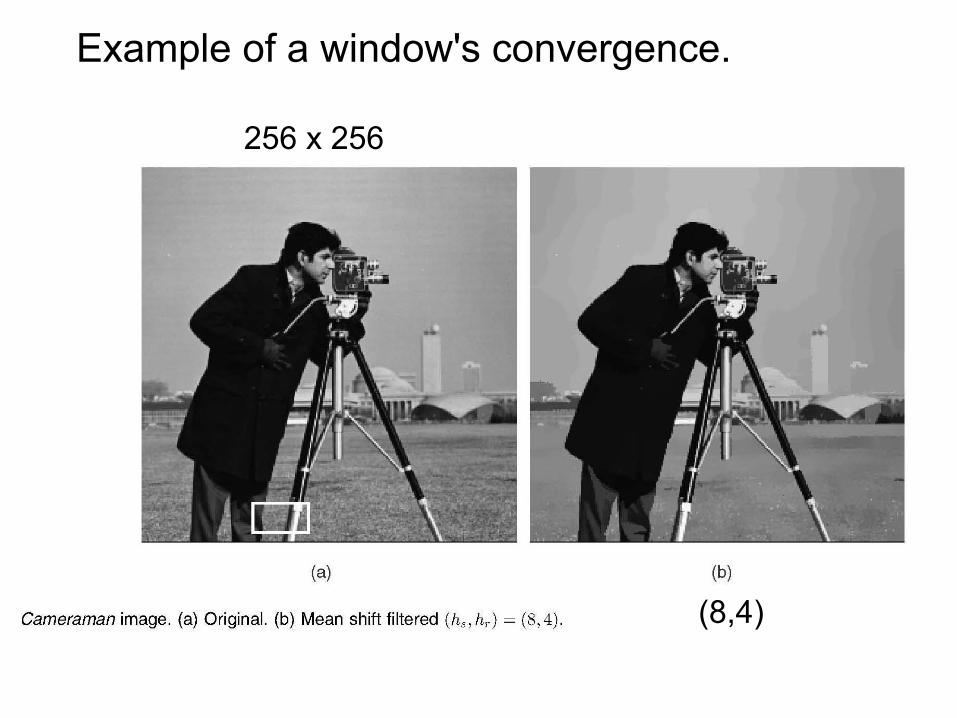
Example of a window's convergence.
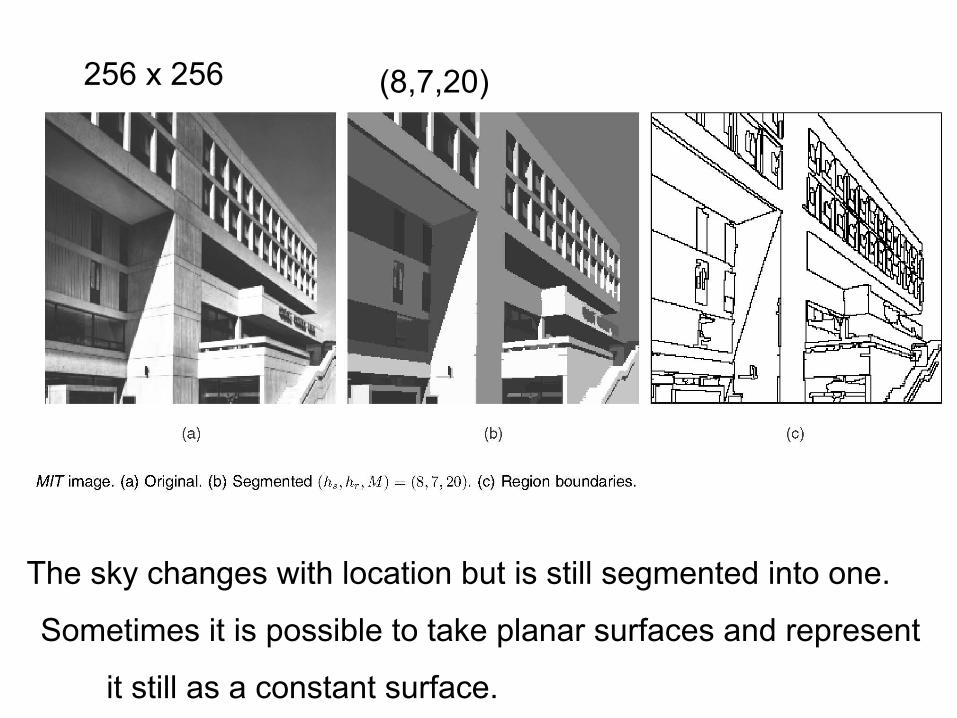
256 x 256
(8,4)

original(inverted)
mean shift
filtering segmentation
Mean shift clustering
• The mean shift algorithm seeks modes of the given set of points.
1. Choose kernel and two bandwidths.
2. For each point: a) Center a window on that point.
b) Compute the mean of the data in the search window.
c) Center the search window at the new mean location.
d) Repeat (b,c) until convergence.
3. Assign points that lead to nearby modes to the same cluster.
In segmentation, the means are both in spatial and range and the points always converge to the nearest mode.

Mean shift clustering are two phases: filtering, as was described before; segmentation, unify adjacent clusters if they are closer than h_s in the spatial domain and h_r in the range domain. (Step 3.) EDISON program can do additional things too, but we will not describe them here. Mean shift was also used for tracking of motions and fornonlinear spaces through Riemannian manifolds.

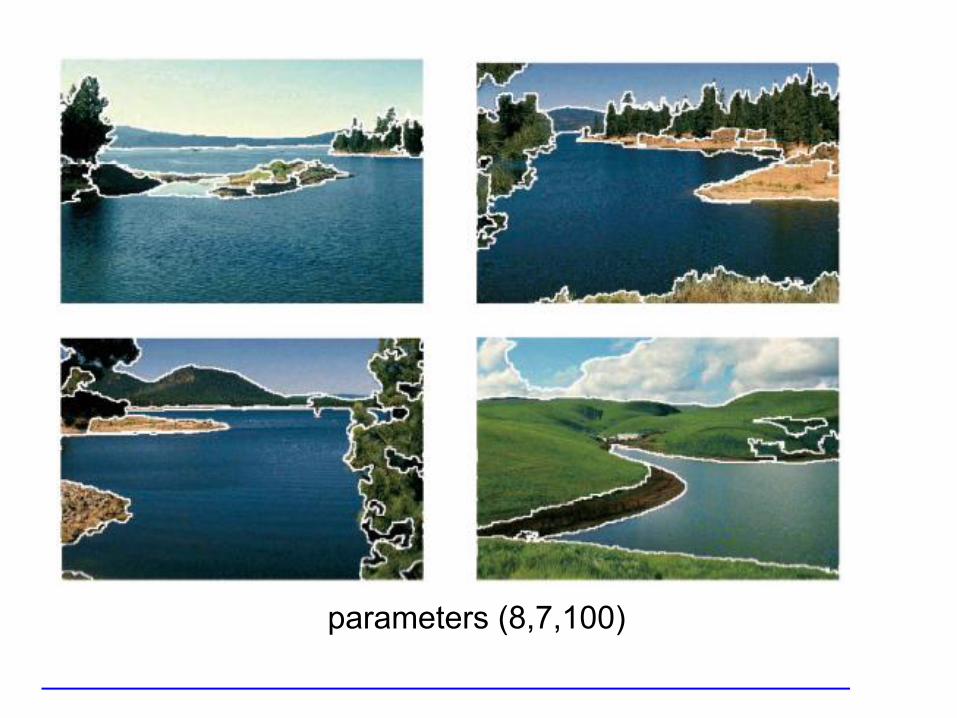
Mean shift segmentation results
Eliminate spatial regions containing less than M pixels.
512 x512
(16,7,40)
256 x 256
The sky changes with location but is still segmented into one.
Sometimes it is possible to take planar surfaces and represent
it still as a constant surface.
(8,7,20)

parameters (8,7,20)
Mean shift pros and cons
• Pros – Does not assume spherical clusters. – Just two parameters (window sizes). – Finds variable number of modes, which are not given. – Robust to outliers and weak nonconstant regions.
• Cons – Output depends on window size. – Efficient implementation uses on short cuts in the search. – Does not scale well directly with dimension of feature
space is above ten.

Berkeley Segmentation Engine
http://www.eecs.berkeley.edu/Research/Projects/CS/vision/grouping/
one of the best segmentation groups
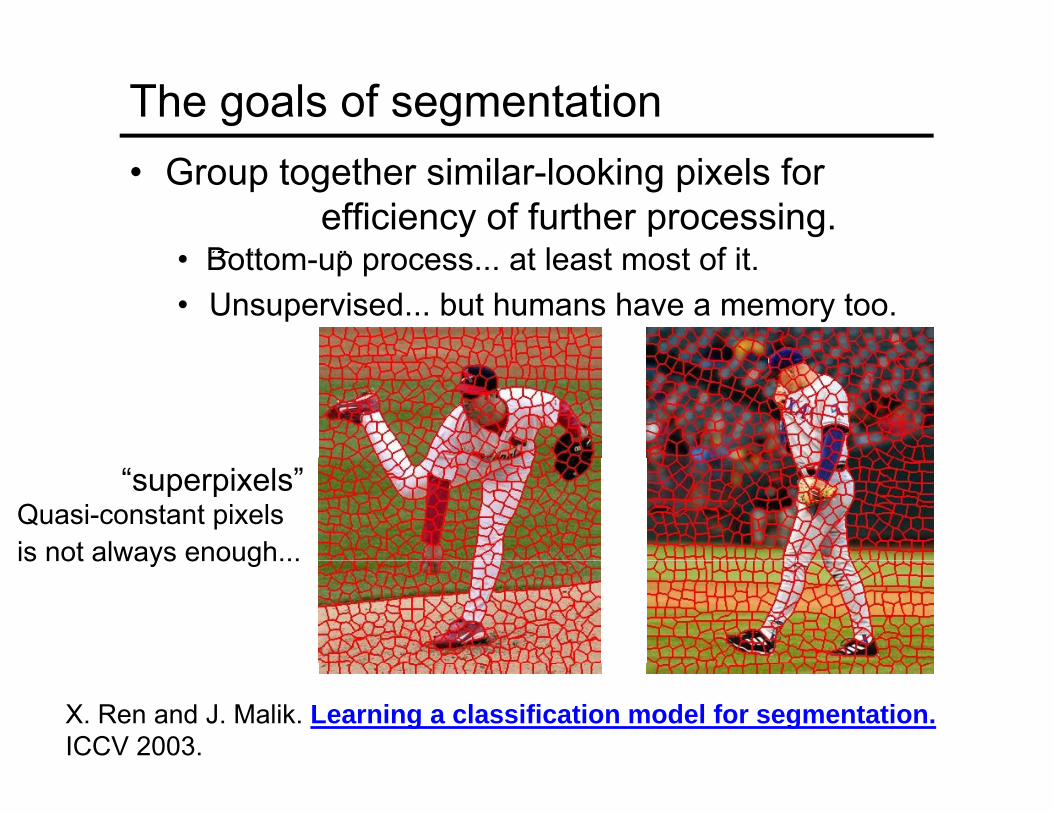
The goals of segmentation• Group together similar-looking pixels for
efficiency of further processing.“B tt ”• Bottom-up process... at least most of it.
• Unsupervised... but humans have a memory too.
“superpixels”
X. Ren and J. Malik. Learning a classification model for segmentation.ICCV 2003.
Quasi-constant pixelsis not always enough...
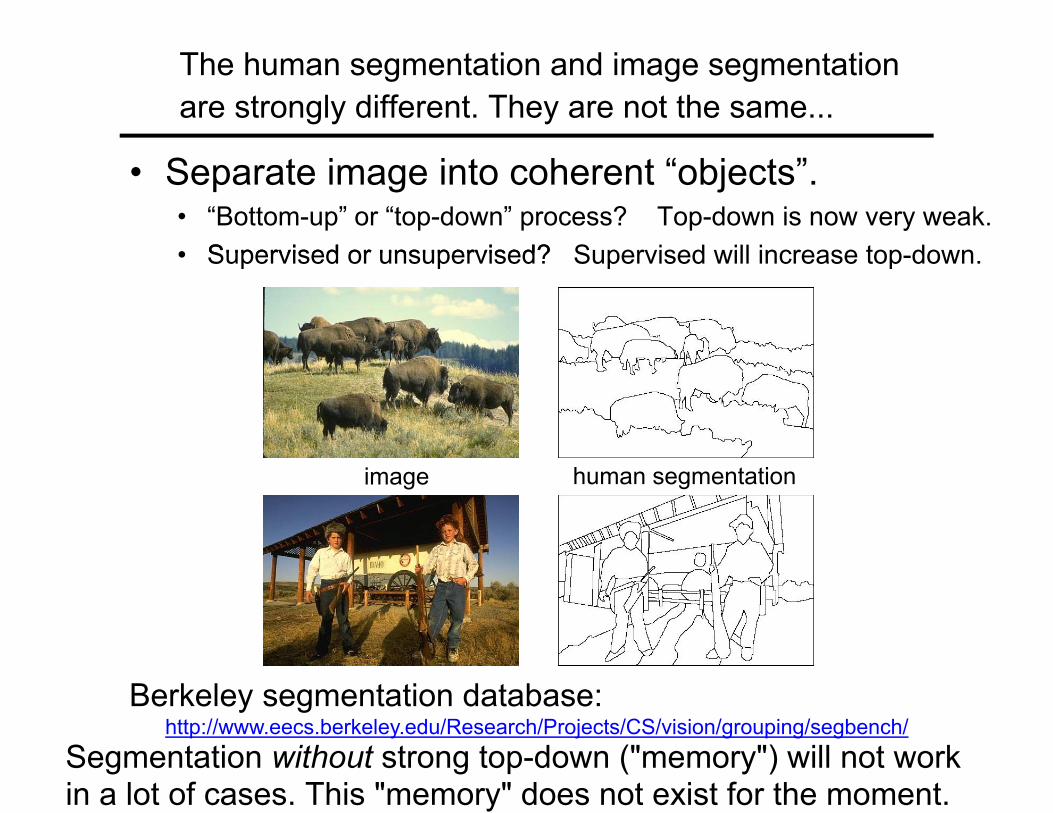
• Separate image into coherent “objects”.• “Bottom-up” or “top-down” process? Top-down is now very weak.• Supervised or unsupervised?• Supervised or unsupervised? Supervised will increase top-down.
image human segmentation
Berkeley segmentation database:http://www.eecs.berkeley.edu/Research/Projects/CS/vision/grouping/segbench/
Segmentation without strong top-down ("memory") will not workin a lot of cases. This "memory" does not exist for the moment.
The human segmentation and image segmentationare strongly different. They are not the same...
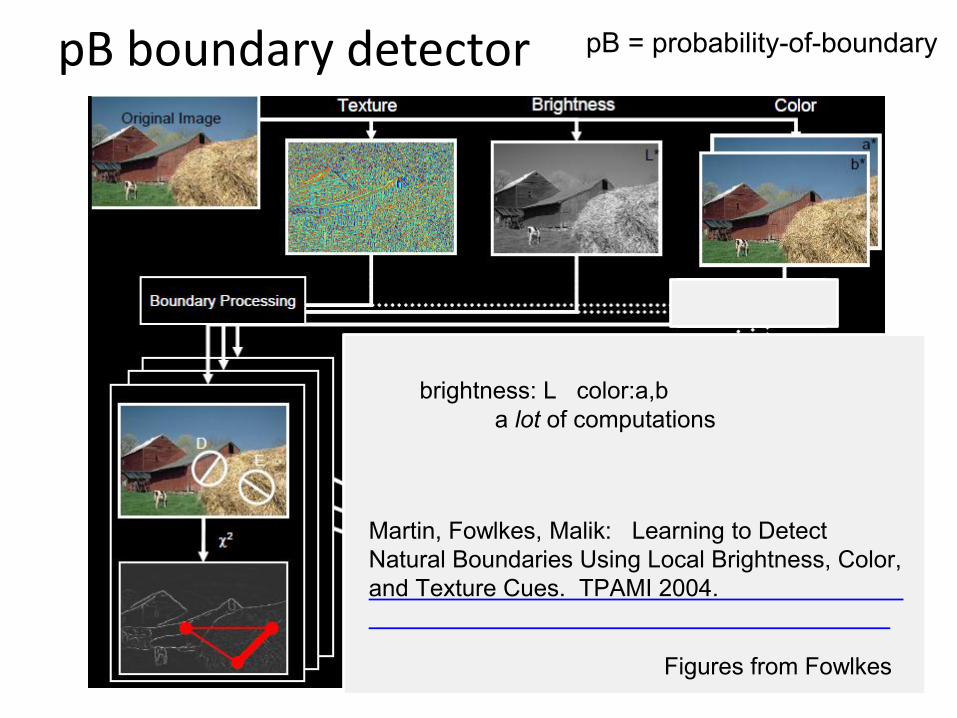
pB boundary detector
Figures from Fowlkes
Martin, Fowlkes, Malik: Learning to Detect Natural Boundaries Using Local Brightness, Color,and Texture Cues. TPAMI 2004.
pB = probability-of-boundary
brightness: L color:a,ba lot of computations

pB Boundary Detector
intensity
brightness
color
texture

Brightness
Color
Texture
Combined
Human
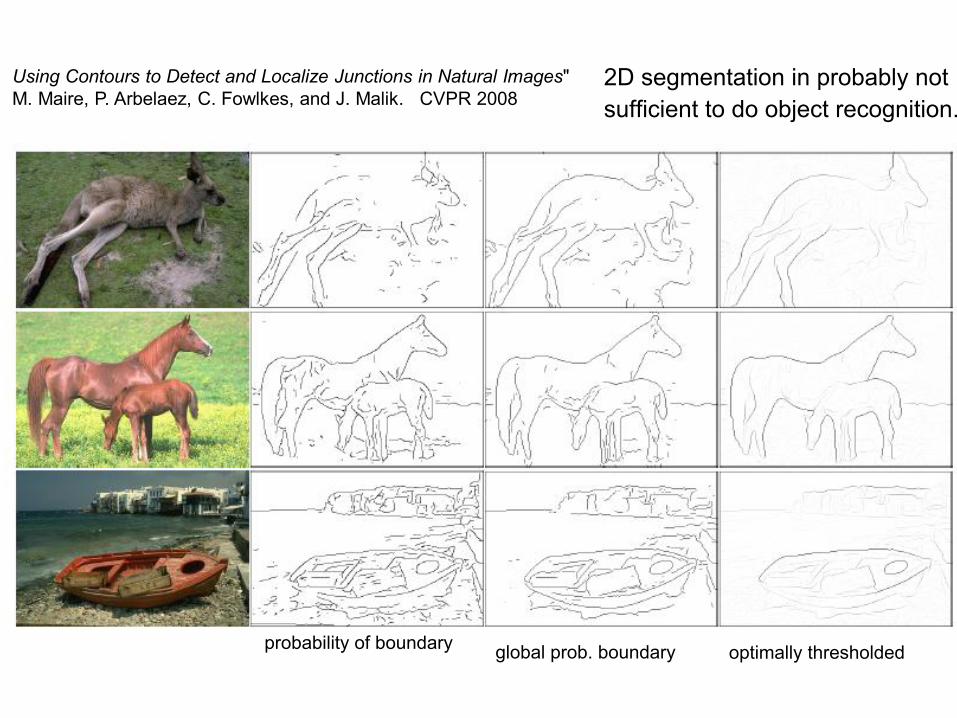
Using Contours to Detect and Localize Junctions in Natural Images" M. Maire, P. Arbelaez, C. Fowlkes, and J. Malik. CVPR 2008
probability of boundary
optimally thresholdedglobal prob. boundary
2D segmentation in probably notsufficient to do object recognition.

45 years of boundary detection
Source: Arbelaez, Maire, Fowlkes, and Malik. TPAMI 2011 (pdf)
TS/(TS+FS)
TS/(TS+FG)True/FalseSegm./Ground
human ground-truth boundaries
(correct +unexpected)
(correct + missing)
This will berather difficult tosegment...with amachine.