coherent noise suppression divided into two components – near-dc doppler component always present...
TRANSCRIPT
Coherent Noise Suppression• Divided into two components
– Near-DC Doppler component• Always present• We do a very good job of removing• There can be artifacts from removal, but are very rare
– Noise that is broadband in Doppler, but is made up of many narrowband fast time subbands• Only always detectable at certain ranges to target• Very broadband in Doppler domain with occasional bursts of very high values
that affect all ranges• Current method looks for peaks in fast-time frequency domain and suppresses
these.• The current method for removal of this non-DC component is not compatible
with our deconvolution method. We currently only use this method on land ice missions.

Sidelobe Suppression• System response is time varying (i.e. there isn’t just one deconvolution filter that
works everywhere)– Rising edge sidelobes are much more stable than falling edge sidelobes
• A basic deconvolution method was developed– It is only moderately robust to the use of non-specular targets (just coherently averages 128
range lines to suppress non-specular scattering energy and noise)– Automated
• On several segments, it required manual adaptation of thresholds and even some hand picking of specular targets
– Occasionally noise floor raises by several dB because of a bad estimate of the system response– Focusses on sidelobe removal from 3 m before peak to 1.6 m after peak– Very good rising edge sidelobe suppression (generally cannot detect any sidelobe)– Poor falling edge sidelobe suppression, although generally achieves some level of suppression– Filter response has to be time varying because system response is time varying therefore
suppression level is time varying!• This may not be a problem except when trying to detect snow over a specular ice interface since the
sidelobes are generally >30 dB down.

2x Fast-time sampling
• Currently implemented• However: Multi-looking in along-track violates
Nyquist in that dimension and therefore will affect any fast-time resampling– Do we want to do 2x sampling in the along-track
dimension as well?
Elevation Compensation
• Data are now elevation compensated before software presumming/coherent averaging
• Small SNR improvement most of the time, but very noticeable improvement when aircraft is changing altitude quickly

Potential Future Improvements:Do we want these?
• Estimate noise floor to implement MMSE version of deconvolution (would allow better coherent noise suppression)– Would potentially allow near-optimal removal of non-DC component of
coherent noise. Most valuable to sea ice results since currently no effort is made to remove the non-DC component for sea ice.
– Should we invest more time???• Need to improve system response estimation and quality metric for
estimations (MMSE-based system estimation and/or improved manual interface)– Would potentially allow near-optimal sidelobe suppression– Should we invest more time???
• SAR processing– On Global Hawk for Snow Radar project schedule to implement by March
2015

Coherent Noise Suppression Examples

CN: Good Suppression (zero detectability of coherent noise)

CN: ArtifactMost common on very short data segments or
on edges of segments

CN: Range Dependent (worst at short ranges)Non-DC Component
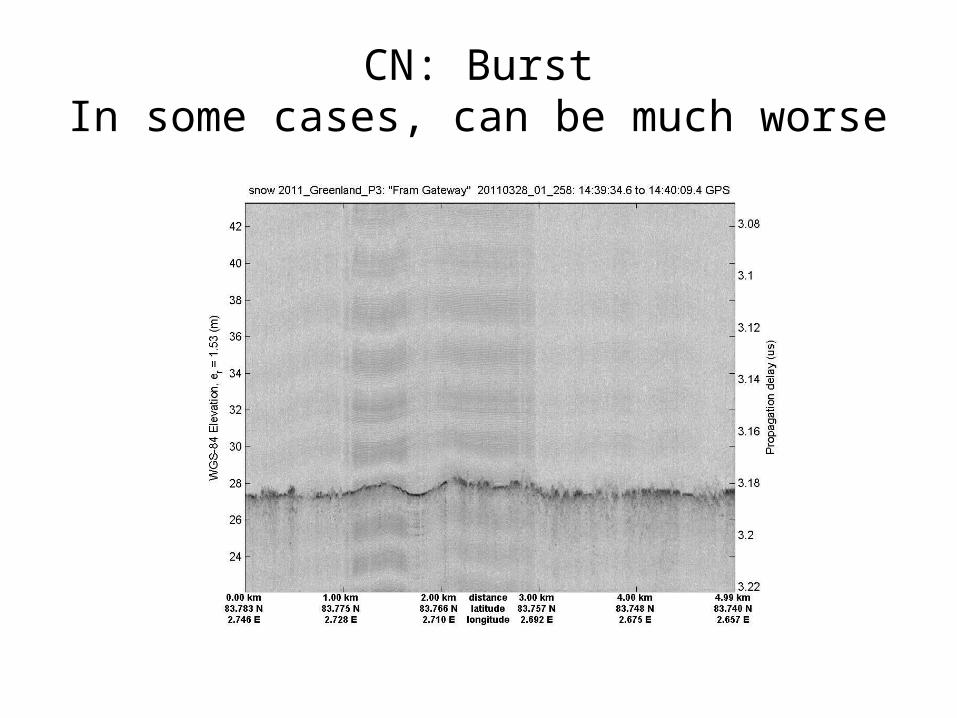
CN: BurstIn some cases, can be much worse
Sidelobe Suppression Examples
• These are taken from real data collected over leads.
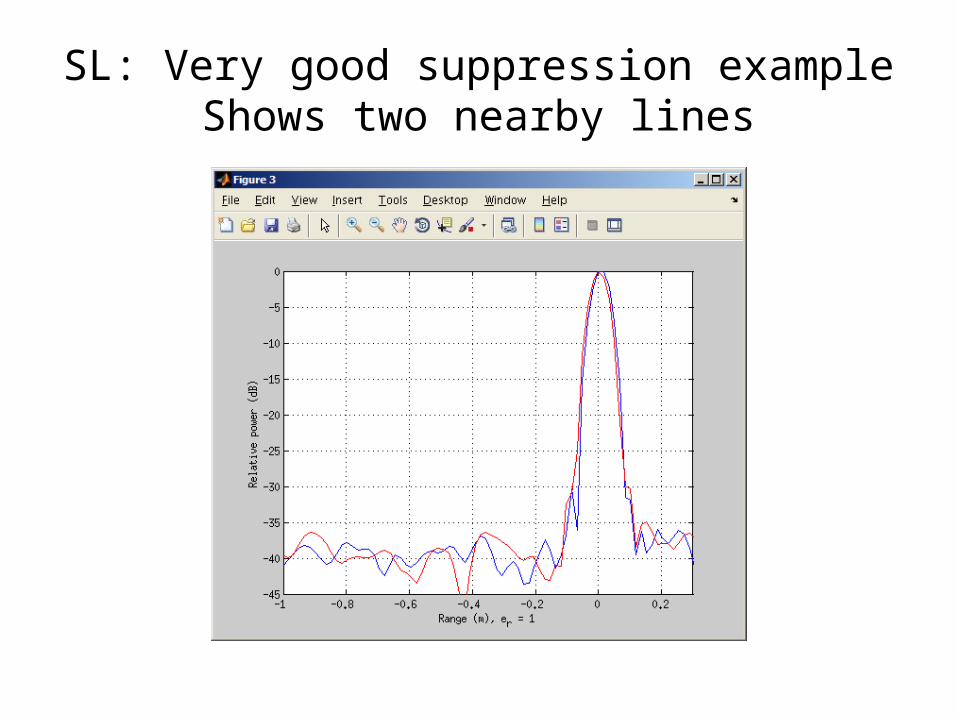
SL: Very good suppression exampleShows two nearby lines
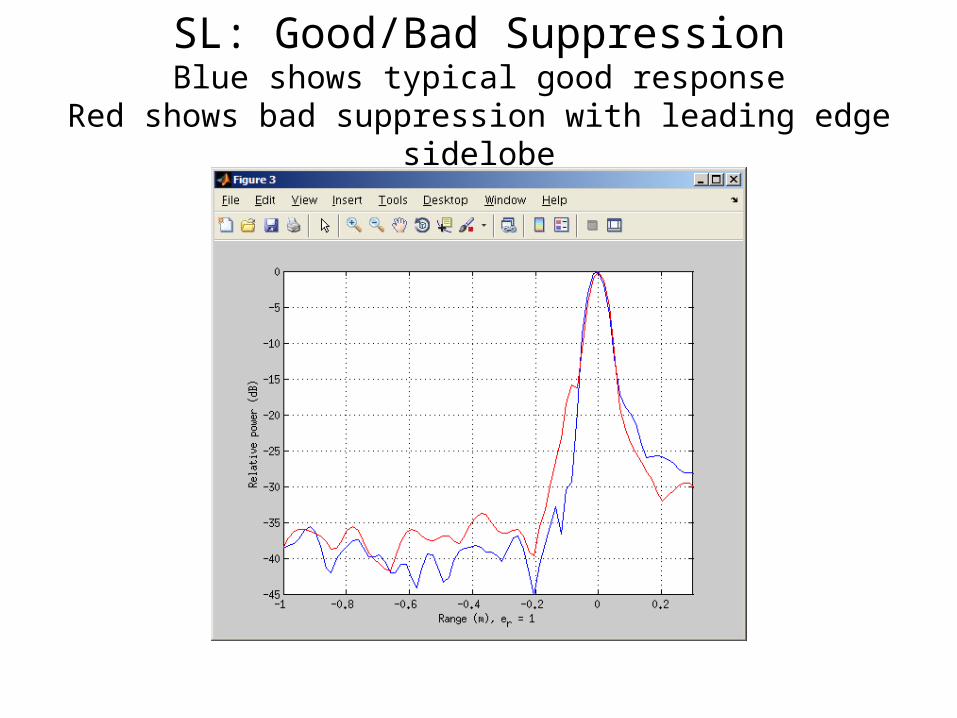
SL: Good/Bad SuppressionBlue shows typical good response
Red shows bad suppression with leading edge sidelobe

SL: Only Good Rising Edge Suppression(note peak does not have as good of a SNR as previous examples so noise floor is higher too)
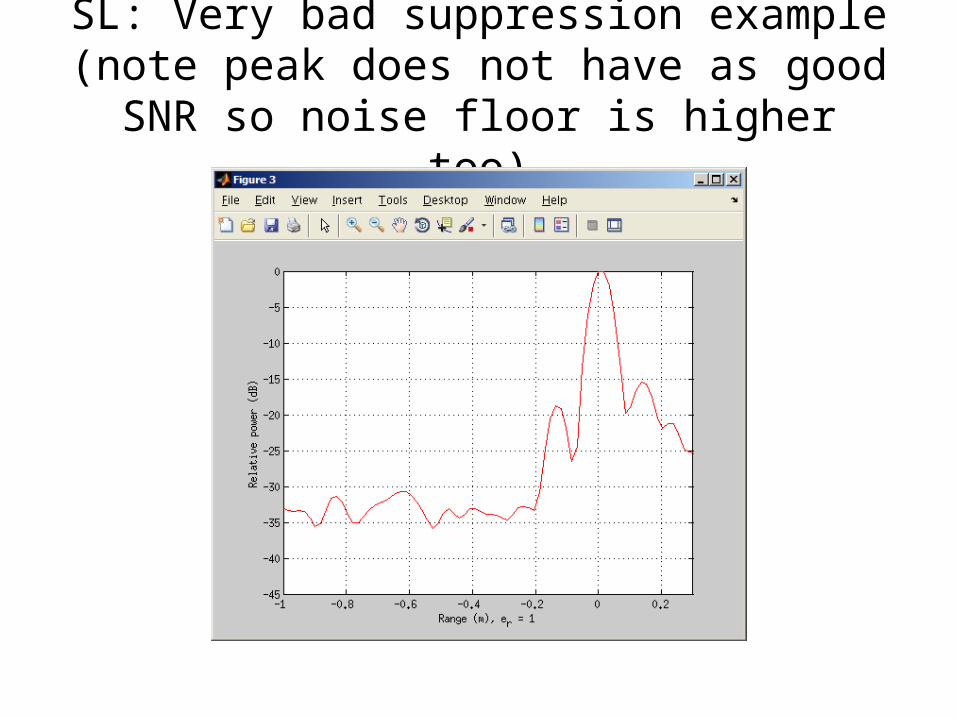
SL: Very bad suppression example(note peak does not have as good SNR so noise
floor is higher too)

SL removal caused noise floor to worsenFairly rare… and I think we can improve this with minor
modifications to our algorithm