comp 776: computer vision - computer sciencelazebnik/spring11/lec01_intro.pdfwhy study computer...
TRANSCRIPT
COMP 776: Computer VisionCOMP 776: Computer Vision
TodayToday
I t d ti t t i i• Introduction to computer vision• Course overview• Course requirements• Course requirements
The goal of computer visionThe goal of computer vision
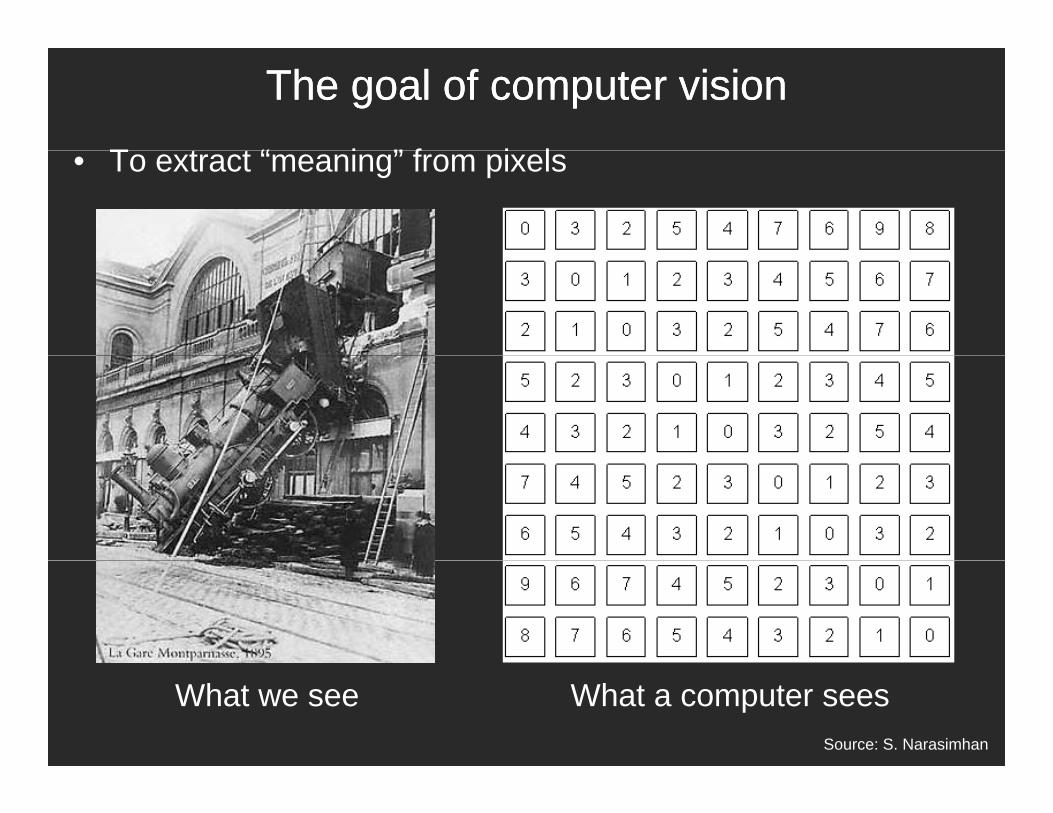
T t t “ i ” f i l• To extract “meaning” from pixels
What we see What a computer seesSource: S. Narasimhan
The goal of computer visionThe goal of computer vision
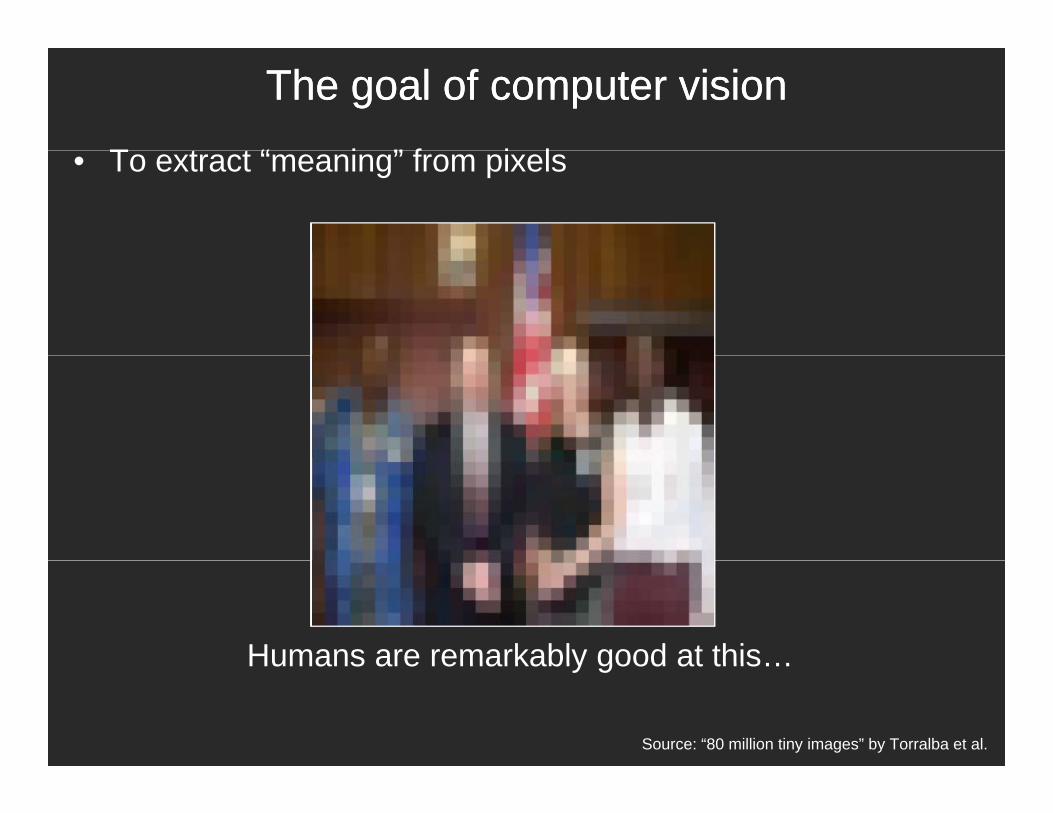
T t t “ i ” f i l• To extract “meaning” from pixels
Humans are remarkably good at this…
Source: “80 million tiny images” by Torralba et al.
Humans are remarkably good at this…
What kind of information can be extracted What kind of information can be extracted f ?f ?from an image?from an image?
M t i 3D i f ti• Metric 3D information• Semantic information
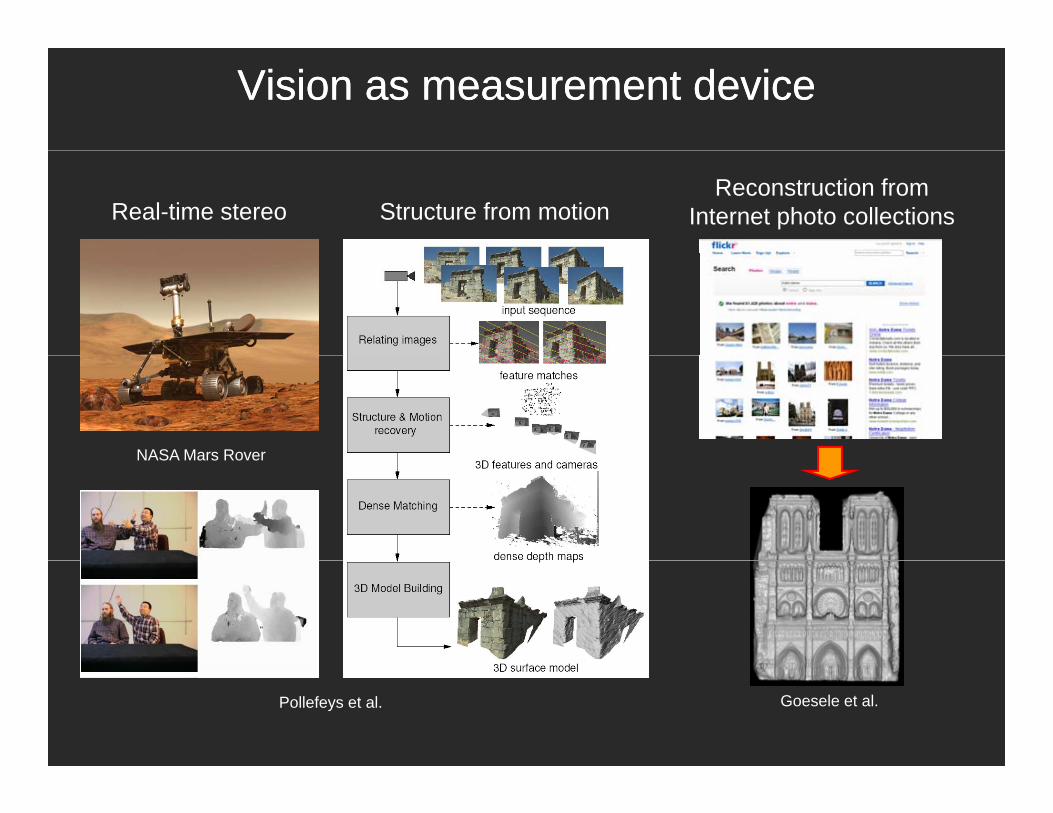
Vision as measurement deviceVision as measurement device
Real-time stereo Structure from motionReconstruction from
Internet photo collections
NASA Mars RoverNASA Mars Rover
Pollefeys et al. Goesele et al.
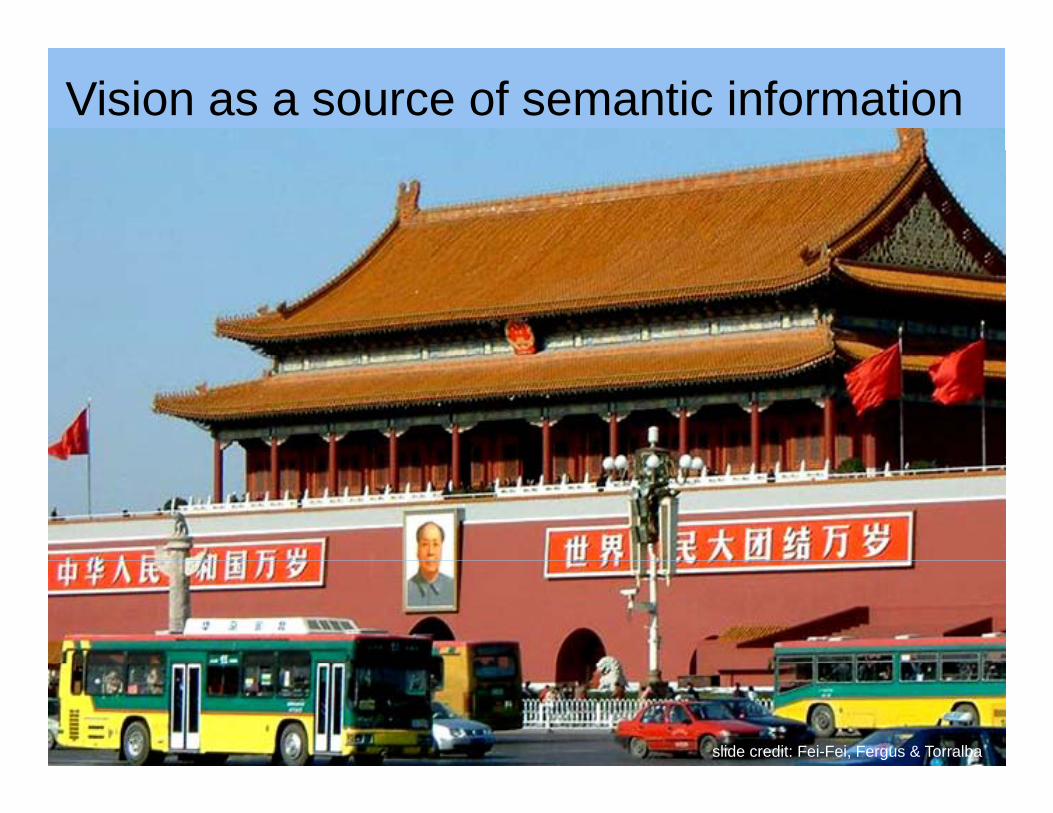
Vision as a source of semantic information
slide credit: Fei-Fei, Fergus & Torralba
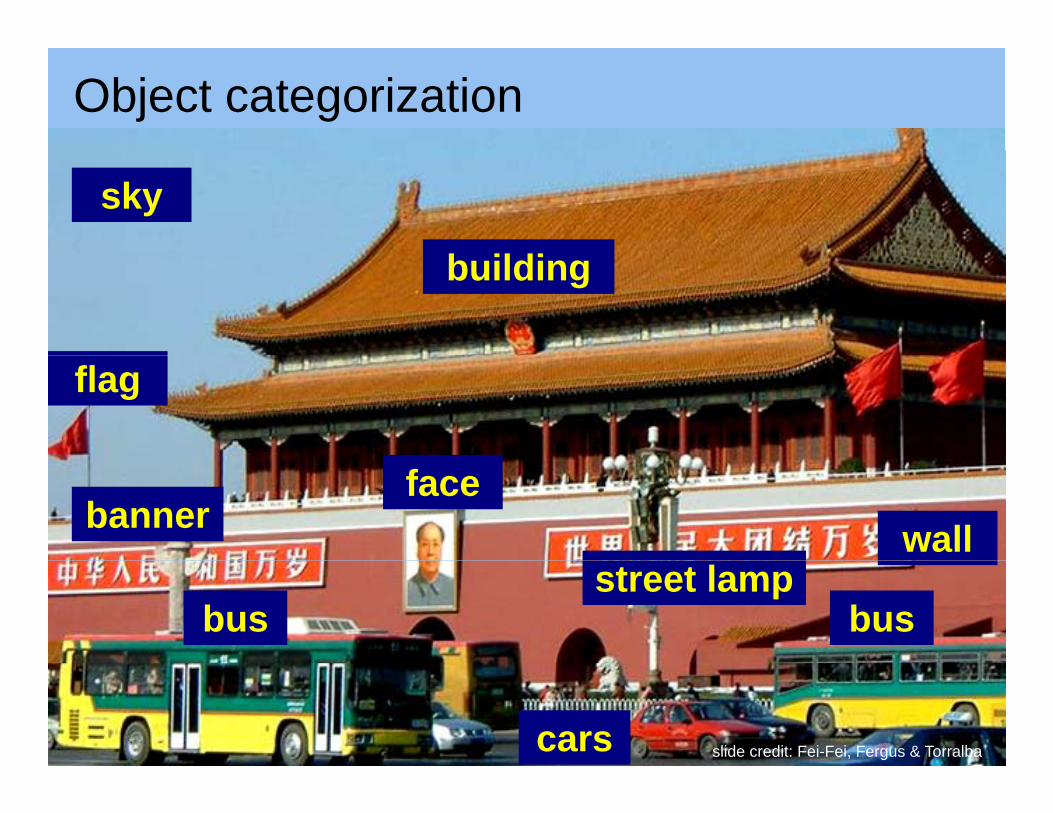
Object categorization
sky
building
flag
wallbannerface
bus busstreet lamp
cars slide credit: Fei-Fei, Fergus & Torralba
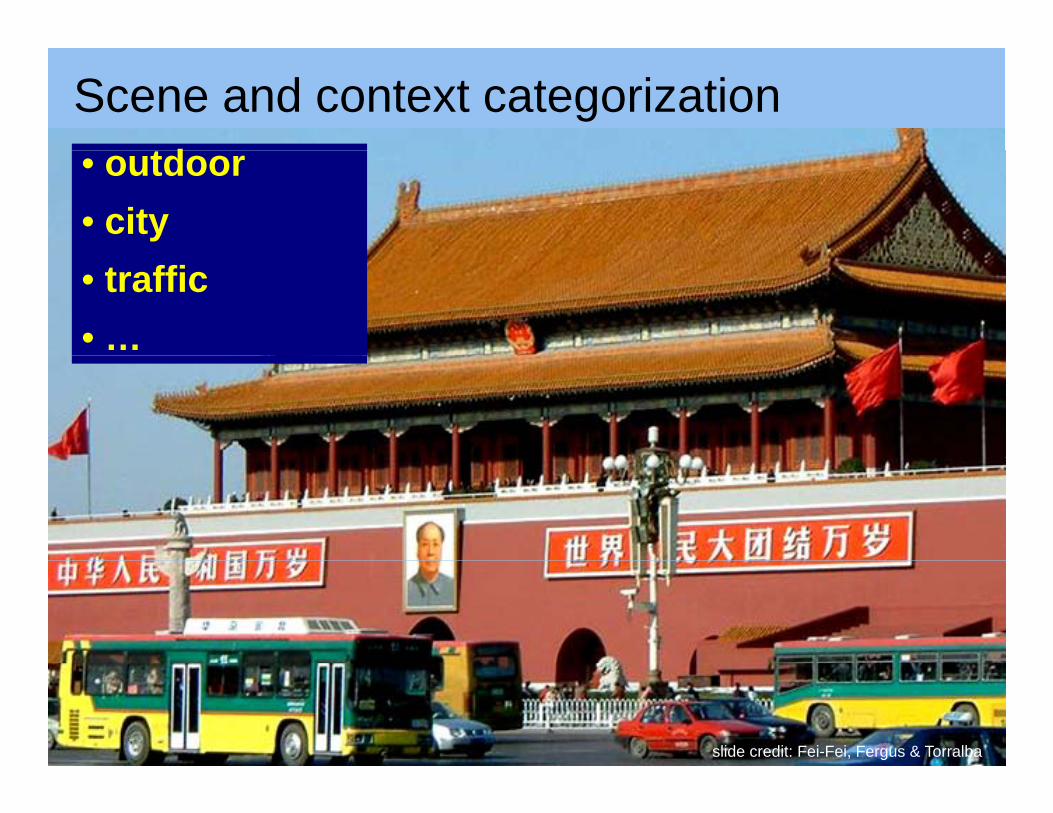
Scene and context categorizationtd• outdoor
• city• traffic• …
slide credit: Fei-Fei, Fergus & Torralba
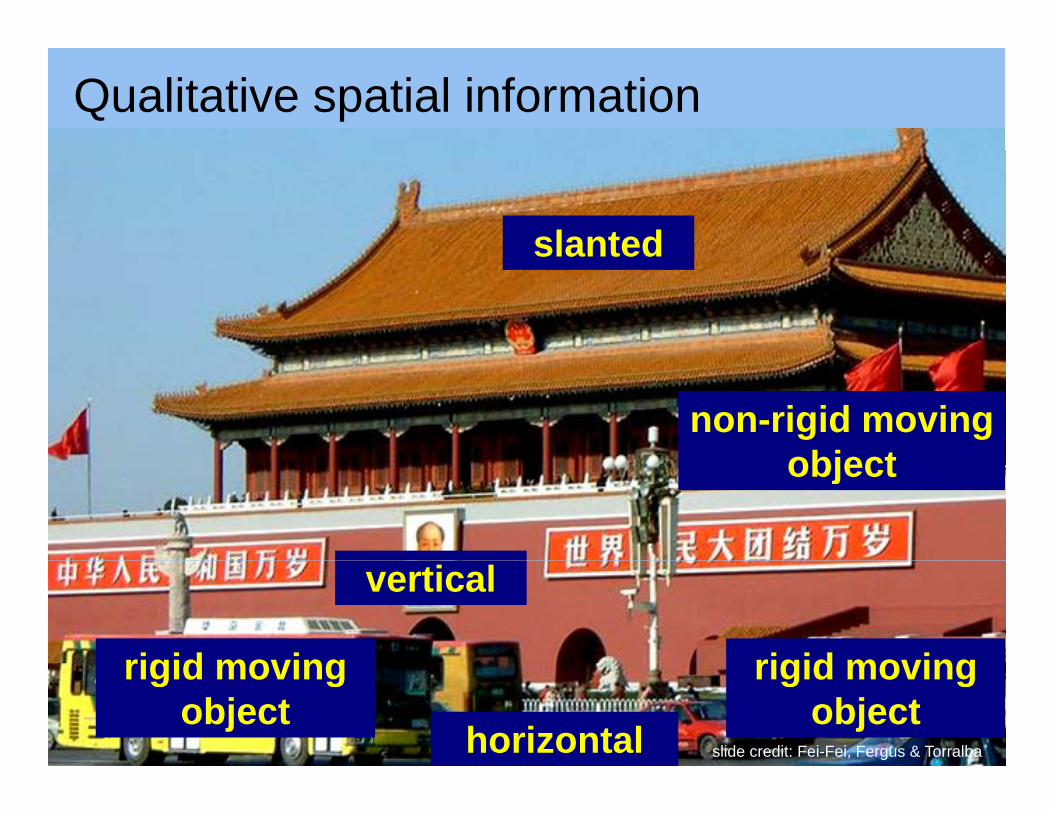
Qualitative spatial information
slantedslanted
non-rigid moving objectobject
rigid moving
vertical
rigid movingrigid moving object
horizontal slide credit: Fei-Fei, Fergus & Torralba
rigid moving object

Why study computer vision?Why study computer vision?• Vision is useful: Images and video are everywhere!Vision is useful: Images and video are everywhere!
Personal photo albums Movies, news, sports
Surveillance and security Medical and scientific images
Why study computer vision?Why study computer vision?
• Vision is useful• Vision is interesting• Vision is difficult
– Half of primate cerebral cortex is devoted to visual processing– Achieving human-level visual perception is probably “AI-complete”Achieving human level visual perception is probably AI complete
Why is computer vision difficult?Why is computer vision difficult?
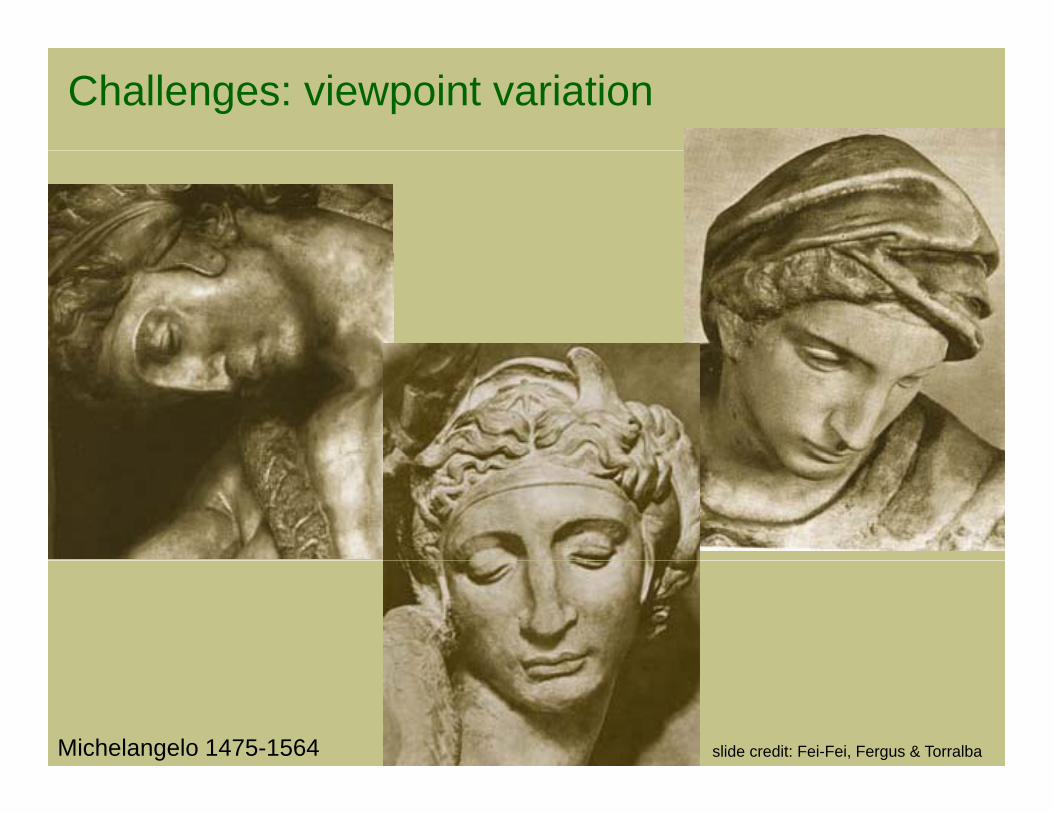
Challenges: viewpoint variation
Michelangelo 1475-1564 slide credit: Fei-Fei, Fergus & Torralba
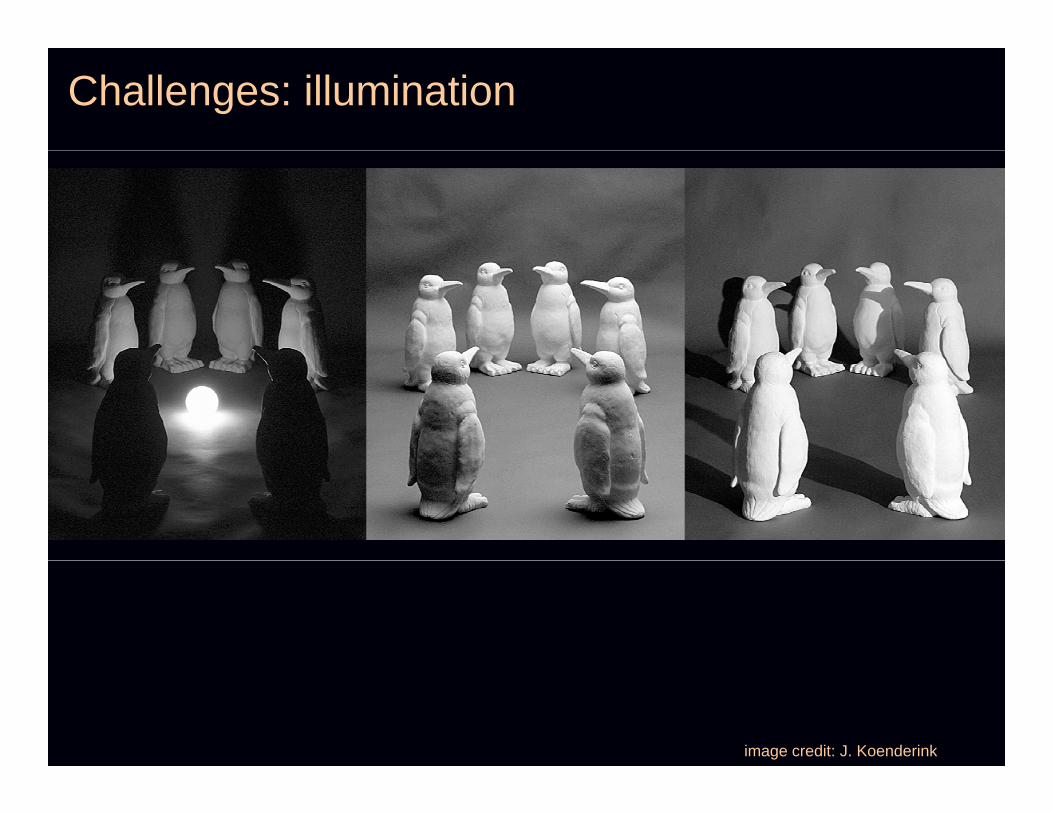
Challenges: illumination
image credit: J. Koenderink
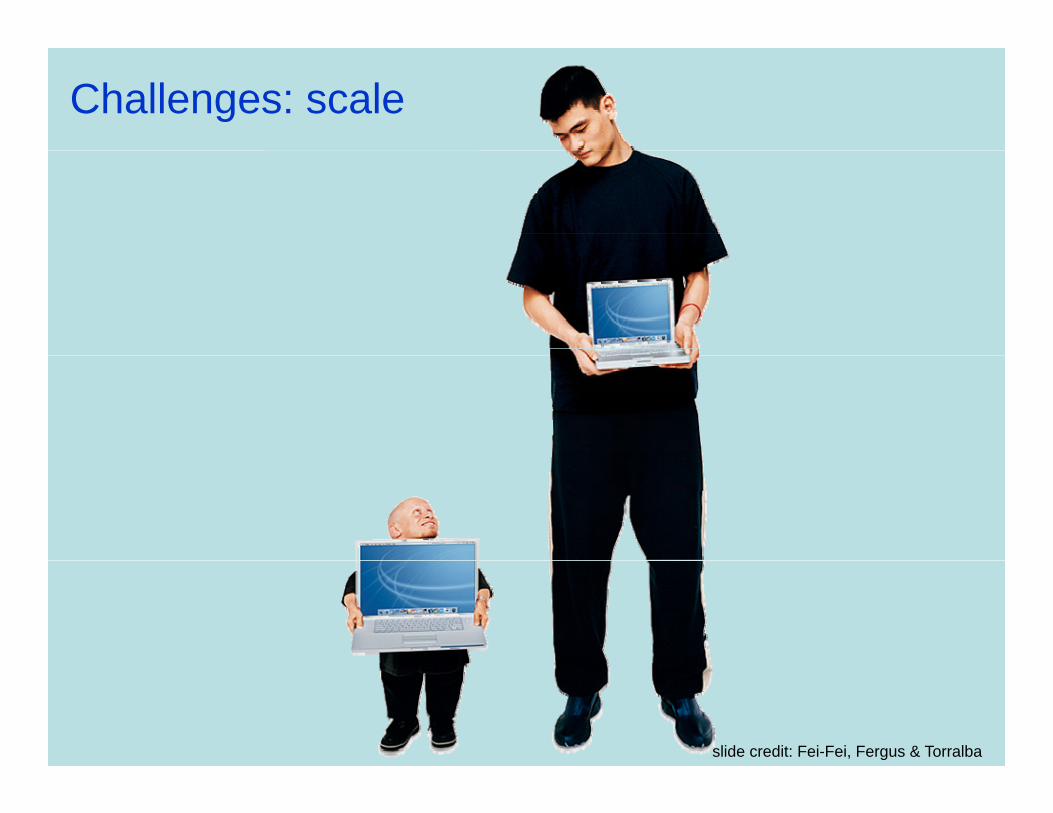
Challenges: scale
slide credit: Fei-Fei, Fergus & Torralba
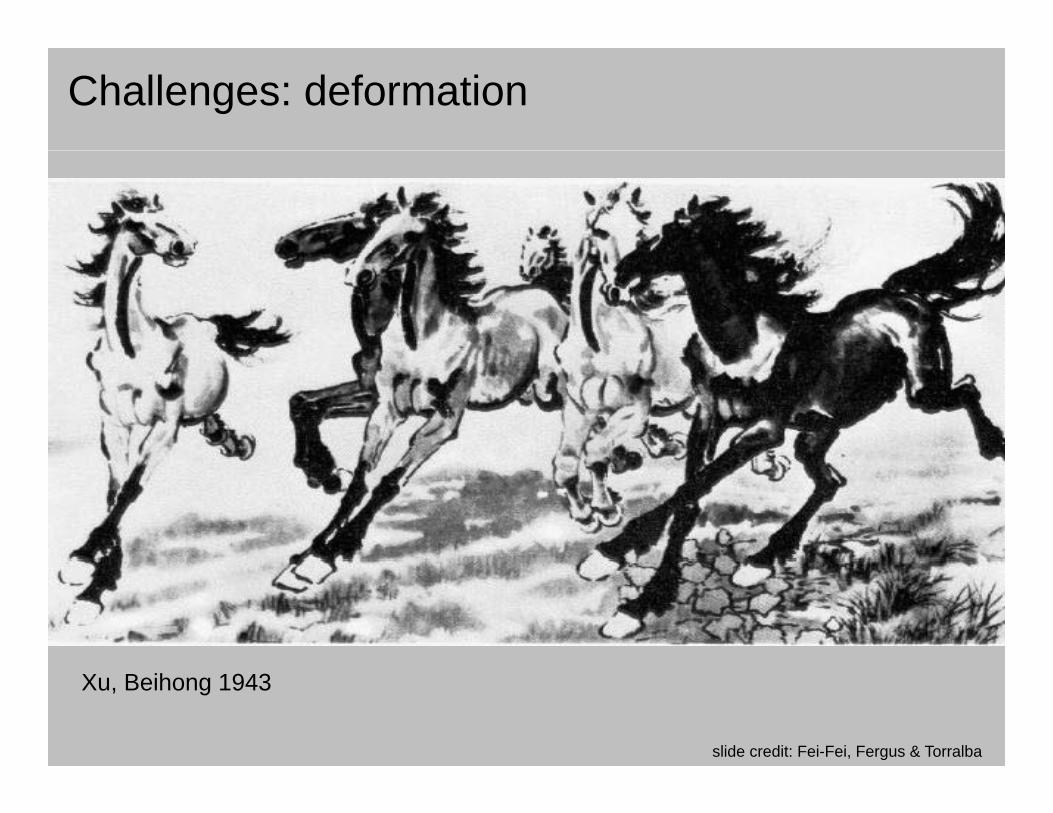
Challenges: deformation
Xu, Beihong 1943
slide credit: Fei-Fei, Fergus & Torralba
Challenges: occlusion
Magritte, 1957 slide credit: Fei-Fei, Fergus & Torralba

Challenges: background clutter
Challenges: Motion

Challenges: object intra-class variationvariation
slide credit: Fei-Fei, Fergus & Torralba
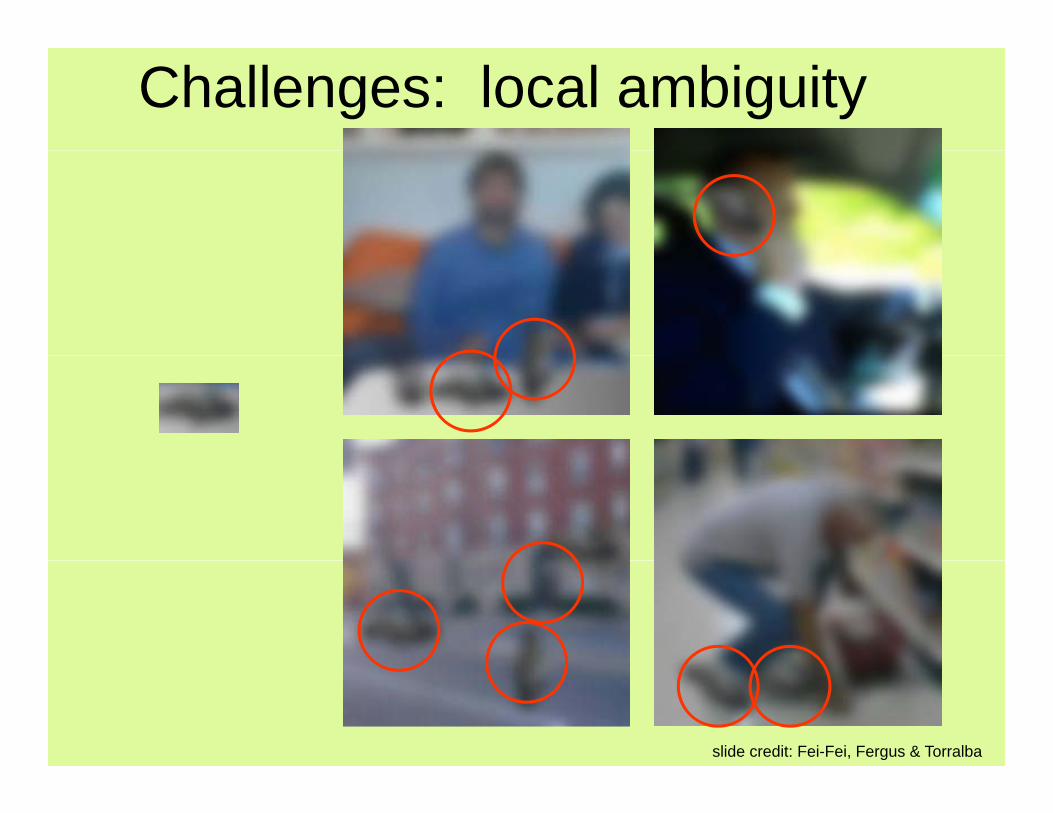
Challenges: local ambiguity
slide credit: Fei-Fei, Fergus & Torralba
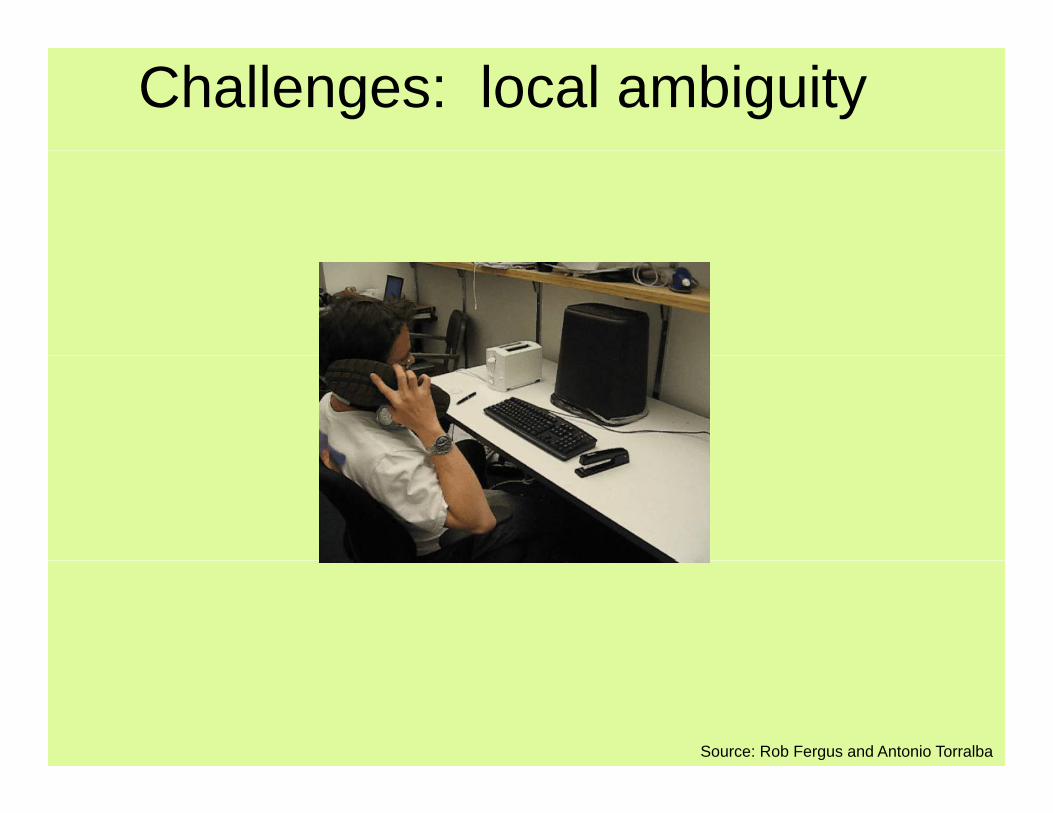
Challenges: local ambiguity
Source: Rob Fergus and Antonio Torralba
Challenges: local ambiguity
Source: Rob Fergus and Antonio Torralba
Challenges or opportunities?Challenges or opportunities?
I f i b t th l l th t t f• Images are confusing, but they also reveal the structure of the world through numerous cues
• Our job is to interpret the cues!Our job is to interpret the cues!
Image source: J. Koenderink
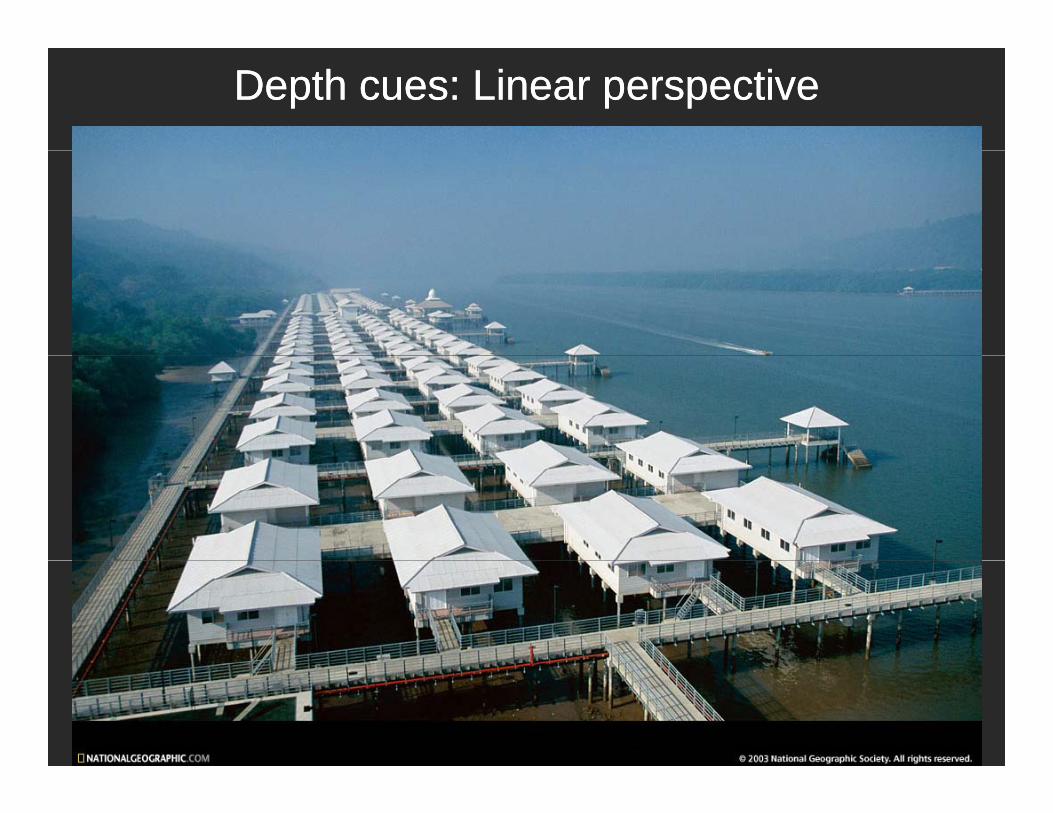
Depth cues: Linear perspectiveDepth cues: Linear perspective
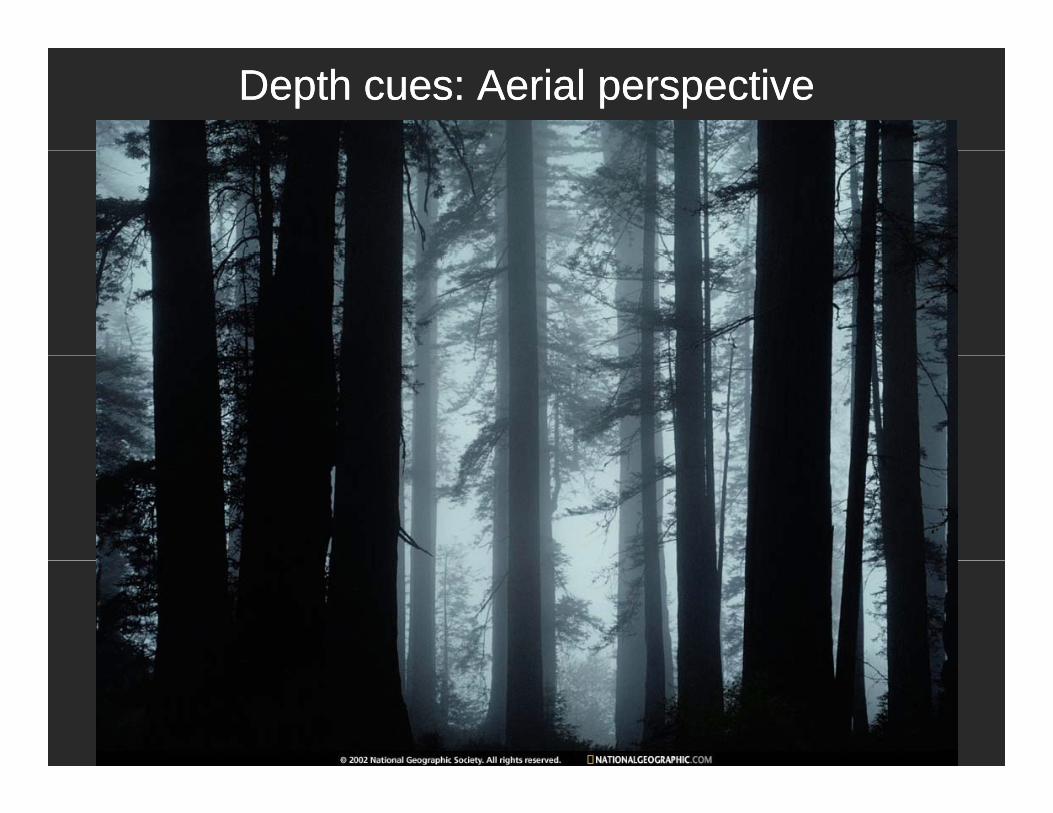
Depth cues: Aerial perspectiveDepth cues: Aerial perspective
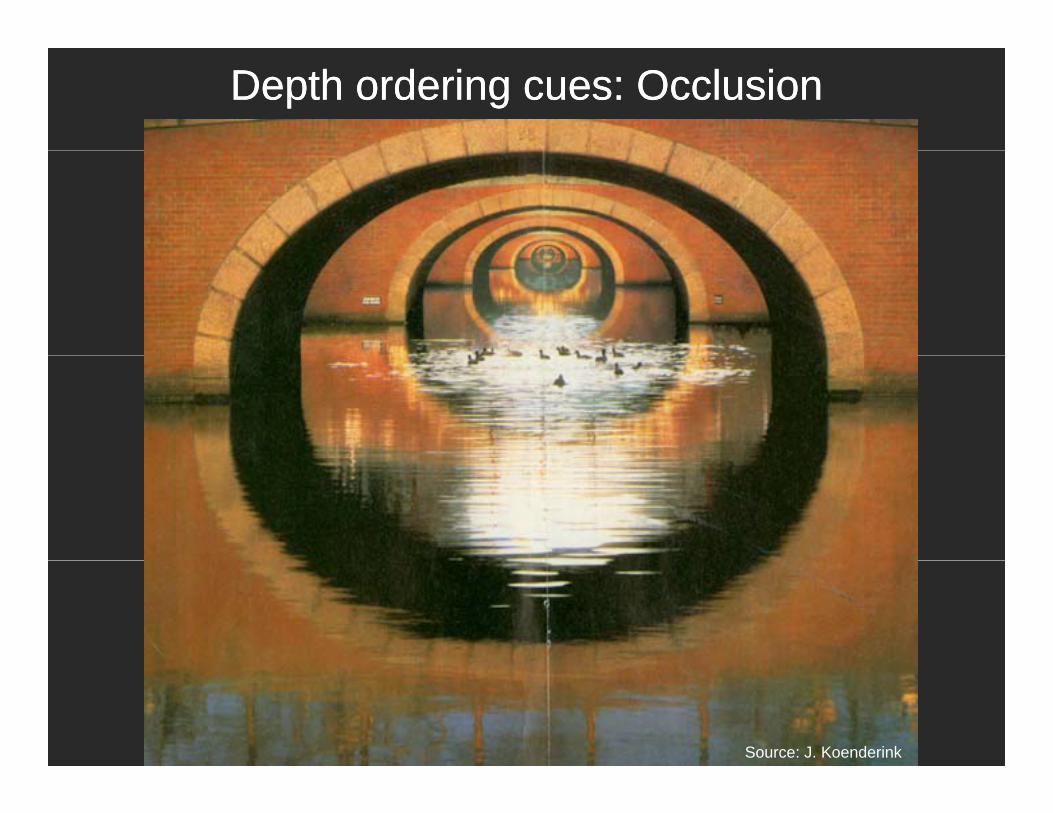
Depth ordering cues: OcclusionDepth ordering cues: Occlusion
Source: J. Koenderink
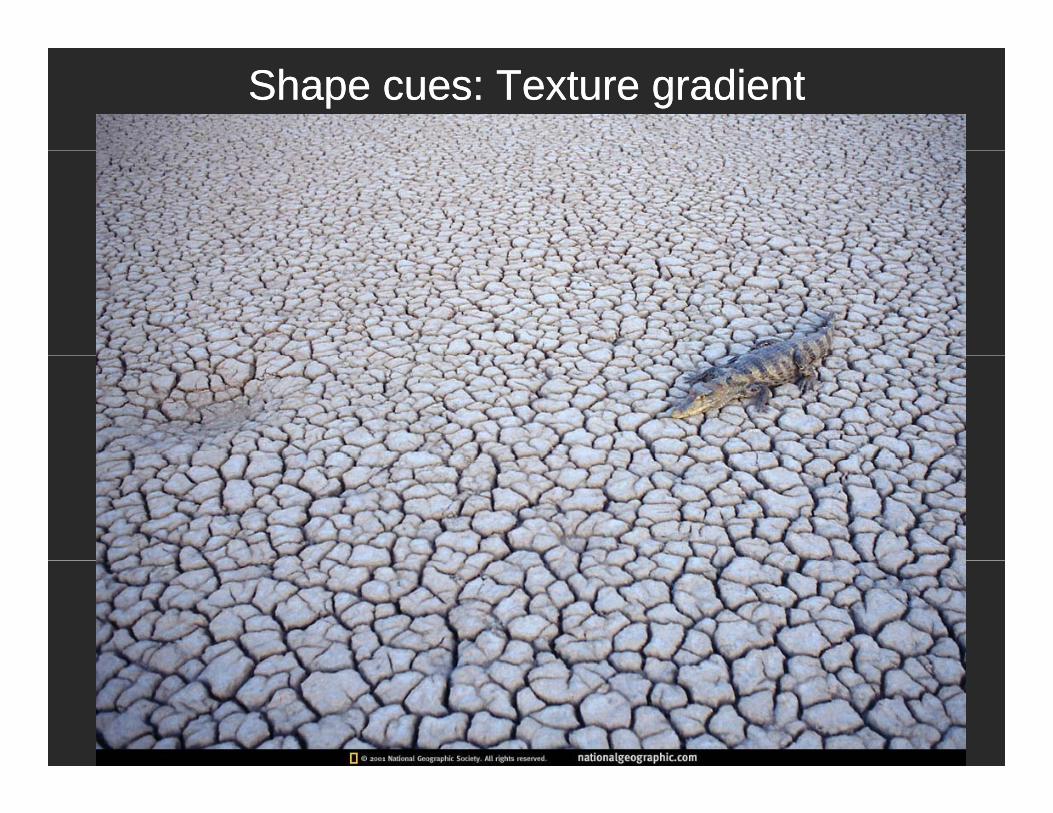
Shape cues: Texture gradientShape cues: Texture gradient
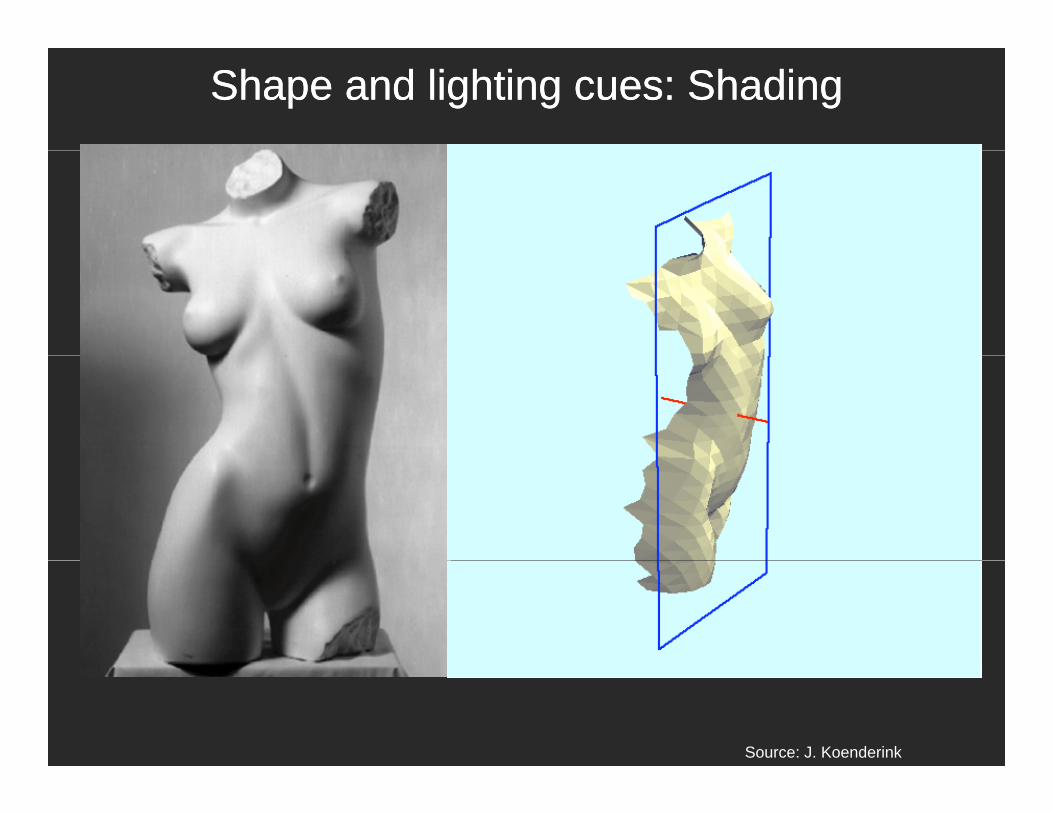
Shape and lighting cues: ShadingShape and lighting cues: Shading
Source: J. Koenderink
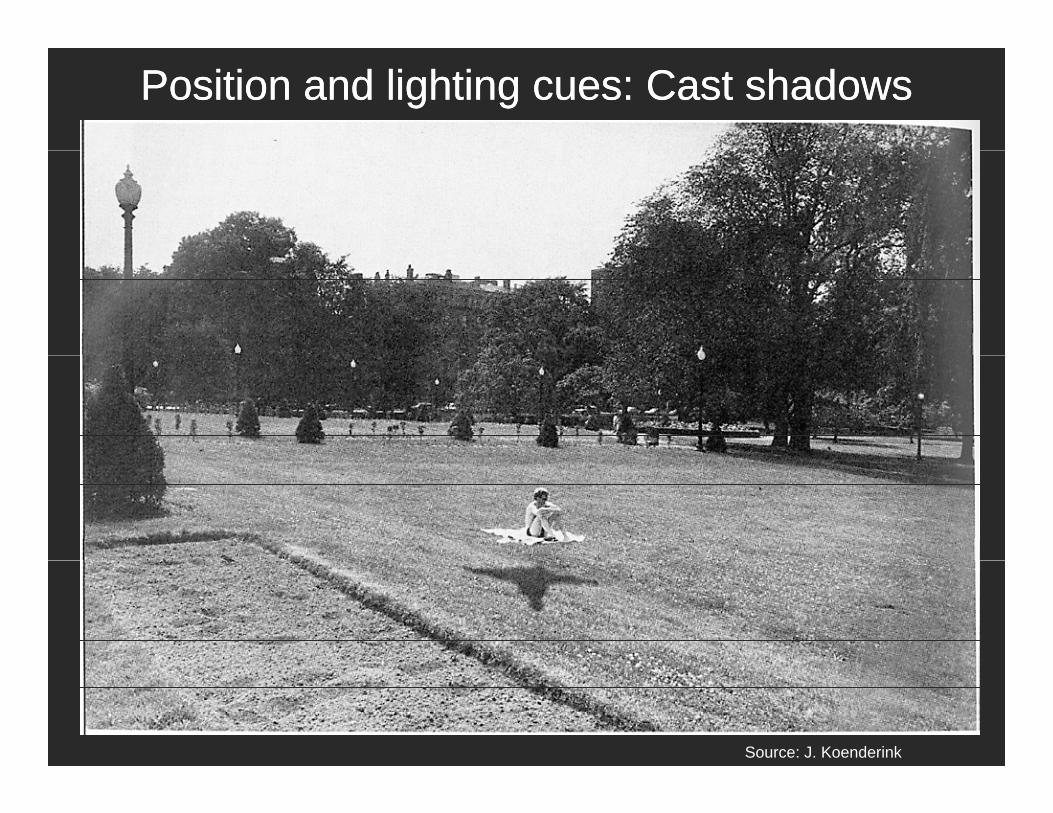
Position and lighting cues: Cast shadowsPosition and lighting cues: Cast shadows
Source: J. Koenderink
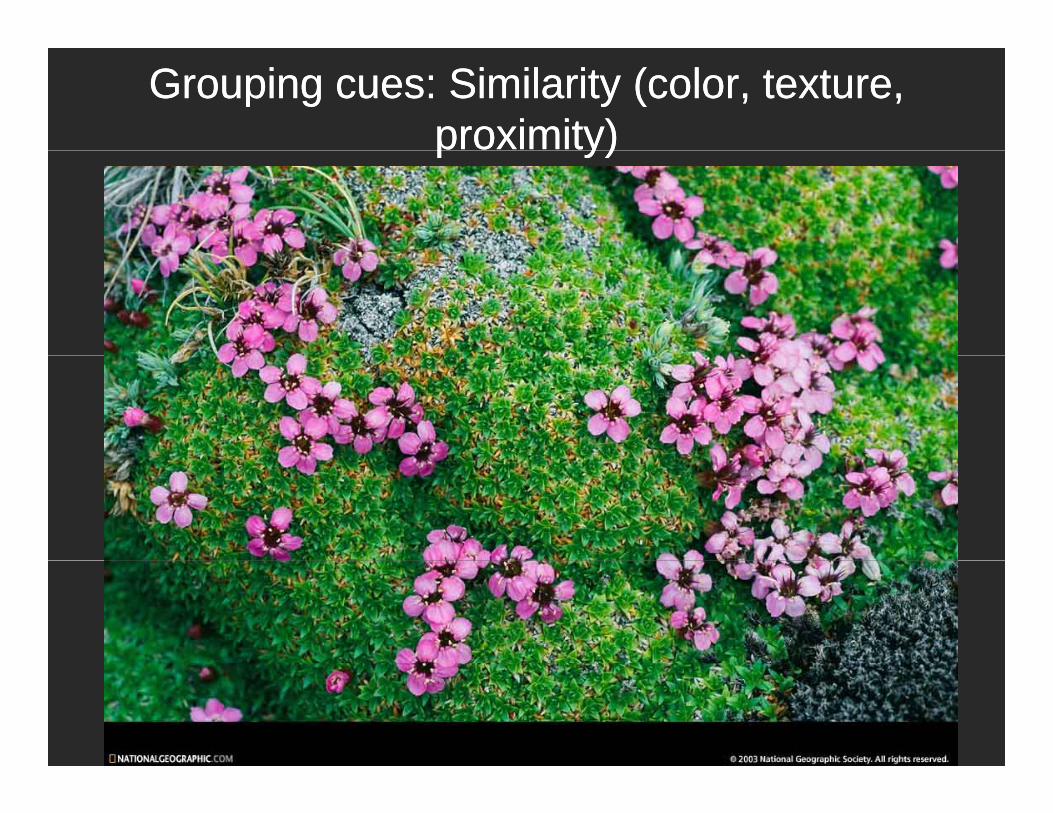
Grouping cues: Similarity (color, texture,Grouping cues: Similarity (color, texture,proximity)proximity)p y)p y)

Grouping cues: “Common fate”Grouping cues: “Common fate”
Image credit: Arthus-Bertrand (via F. Durand)
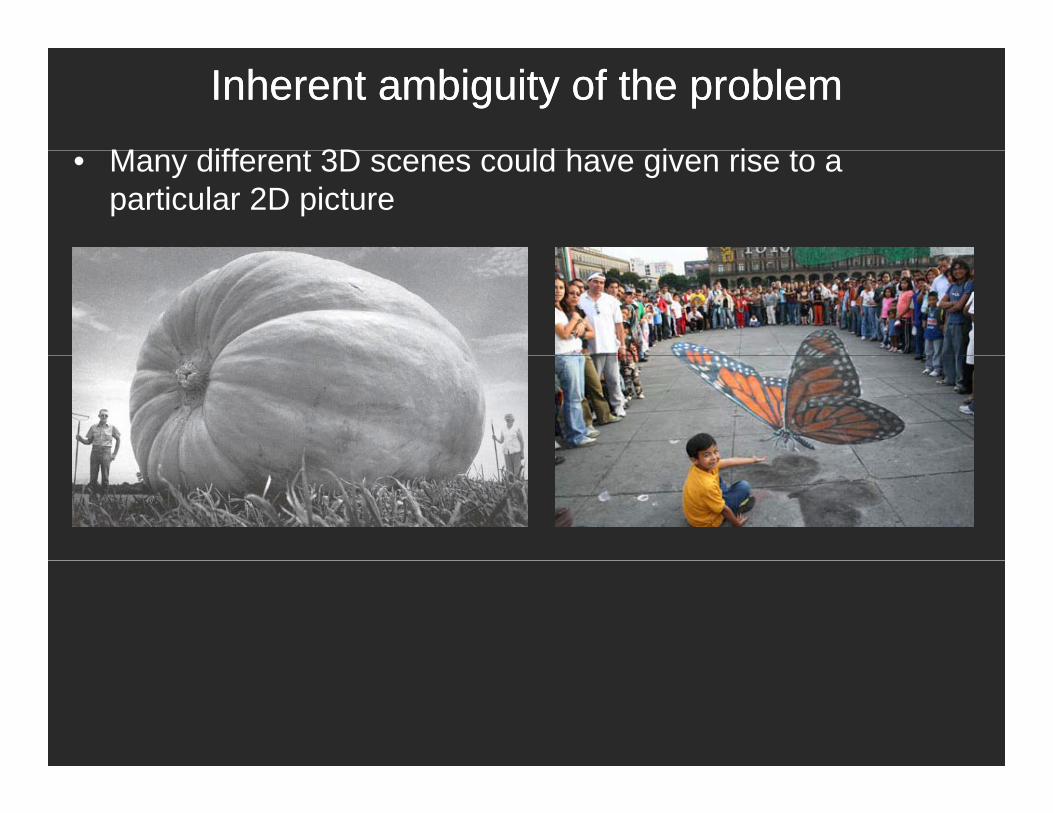
Inherent ambiguity of the problemInherent ambiguity of the problem
M diff t 3D ld h i i t• Many different 3D scenes could have given rise to a particular 2D picture
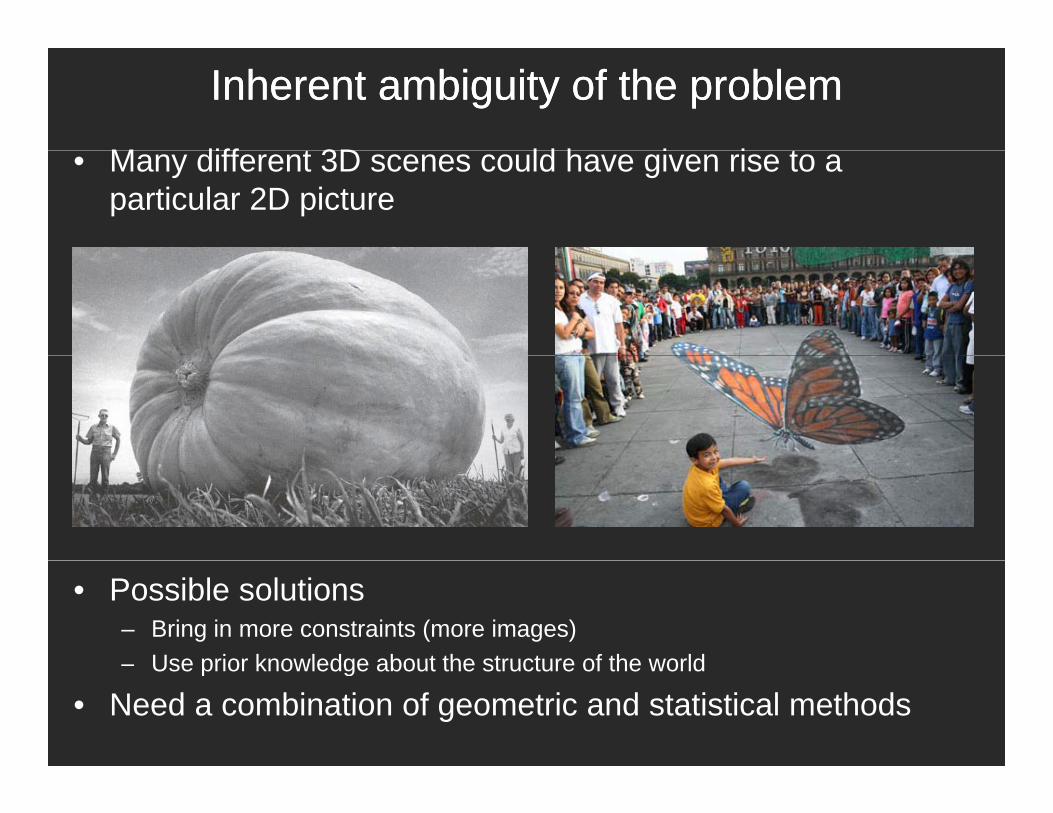
Inherent ambiguity of the problemInherent ambiguity of the problem
M diff t 3D ld h i i t• Many different 3D scenes could have given rise to a particular 2D picture
• Possible solutions– Bring in more constraints (more images)
Use prior knowledge about the structure of the world– Use prior knowledge about the structure of the world
• Need a combination of geometric and statistical methods
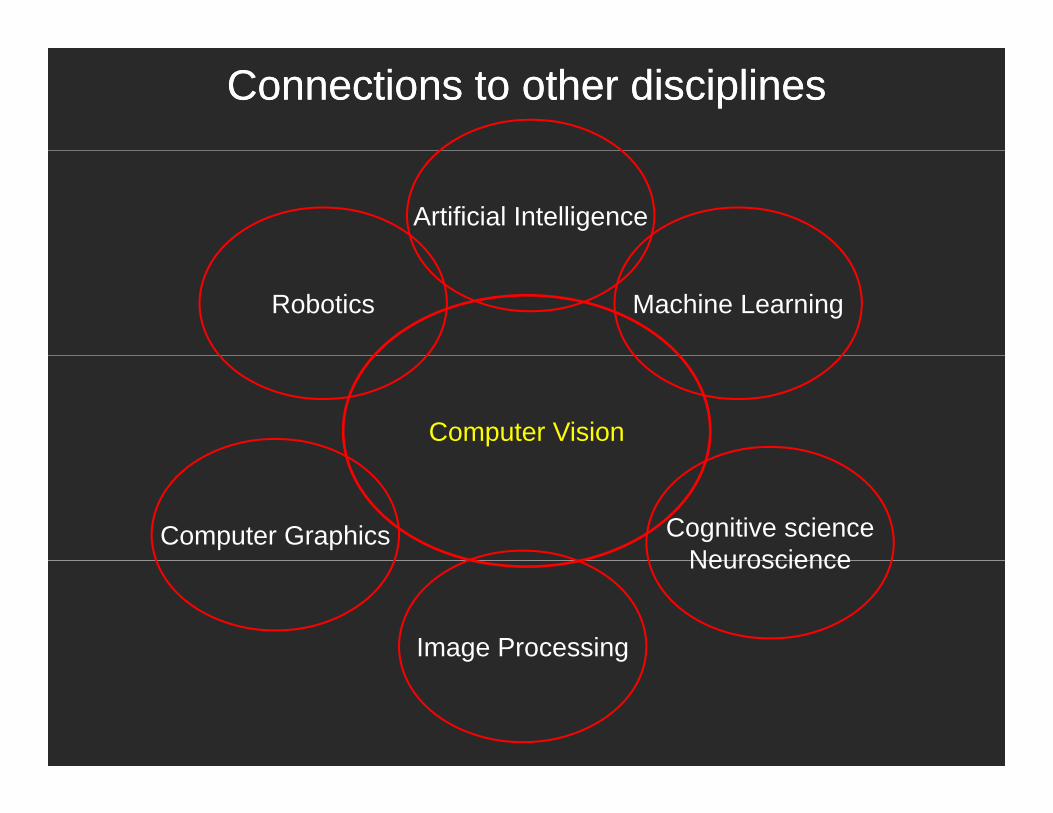
Connections to other disciplinesConnections to other disciplines
Artificial Intelligence
Machine LearningRobotics
Computer Vision
Cognitive scienceNeuroscience
Computer Graphics
Image Processing
Neuroscience
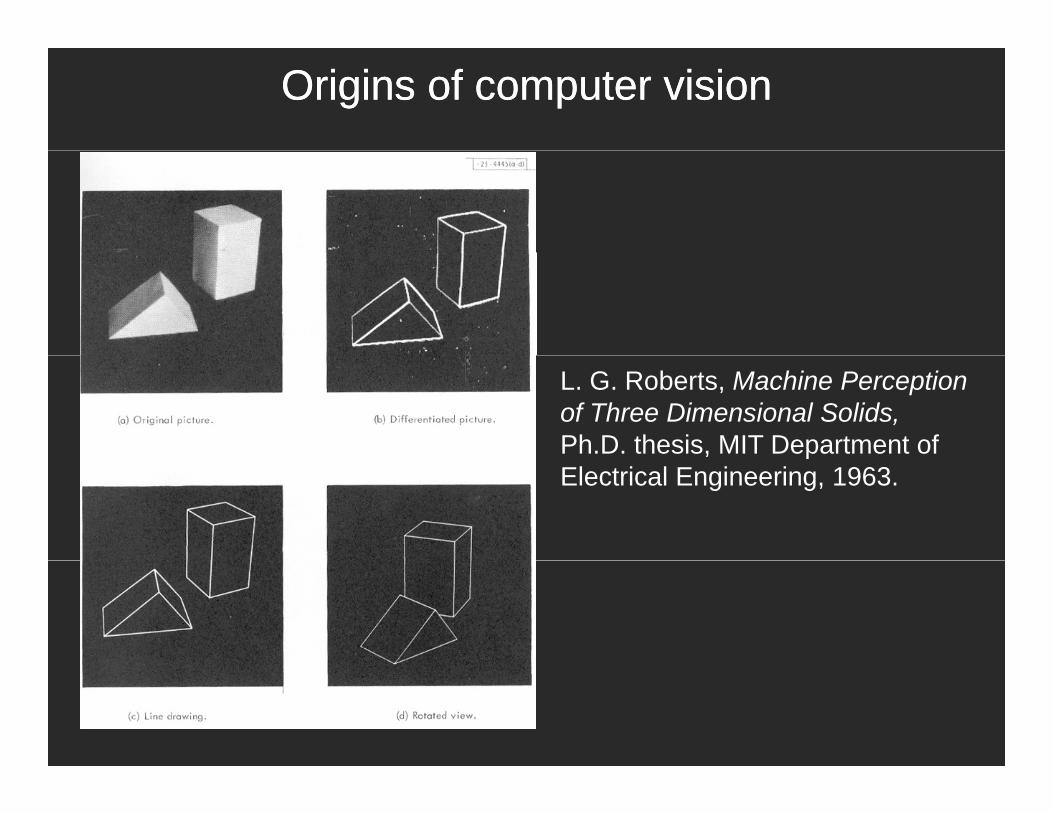
Origins of computer visionOrigins of computer vision
L. G. Roberts, Machine Perception of Three Dimensional Solids,Ph.D. thesis, MIT Department of pElectrical Engineering, 1963.
Successes of computer vision to date
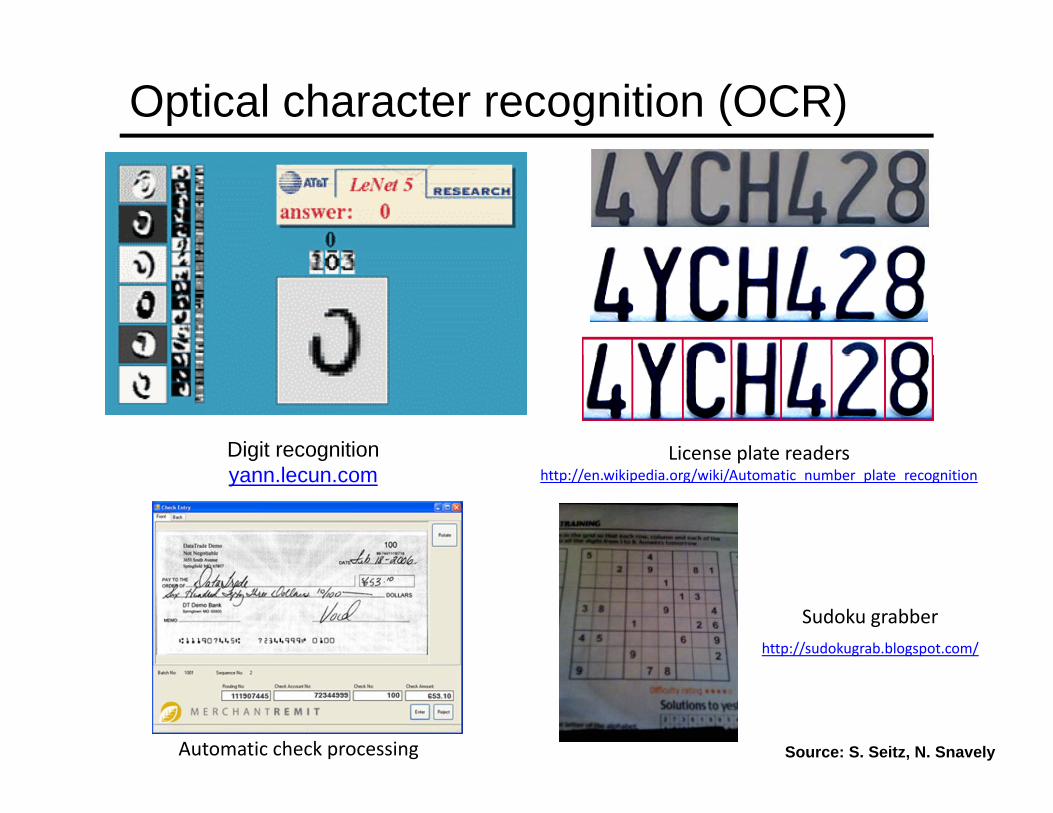
Optical character recognition (OCR)
Digit recognition License plate readersg gyann.lecun.com
License plate readershttp://en.wikipedia.org/wiki/Automatic_number_plate_recognition
Sudoku grabberhttp://sudokugrab.blogspot.com/
Source: S. Seitz, N. SnavelyAutomatic check processing
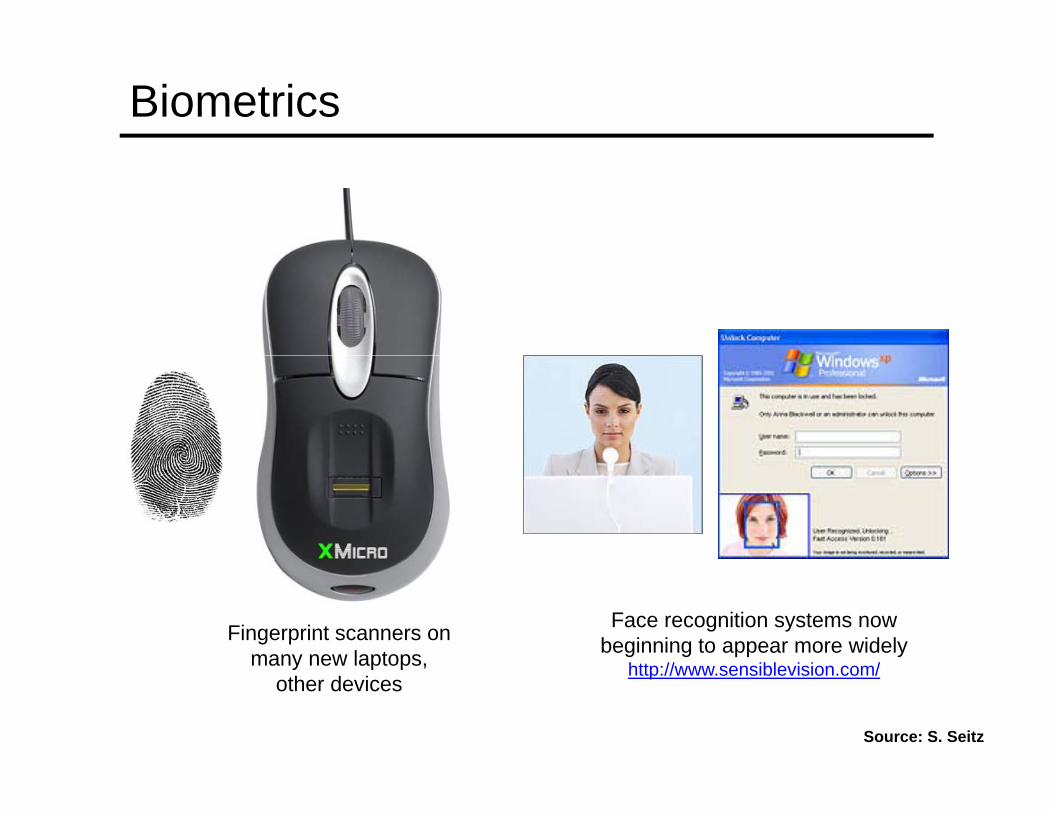
Biometrics
Fingerprint scanners on many new laptops
Face recognition systems now beginning to appear more widely
htt // ibl i i /many new laptops, other devices
http://www.sensiblevision.com/
Source: S. Seitz
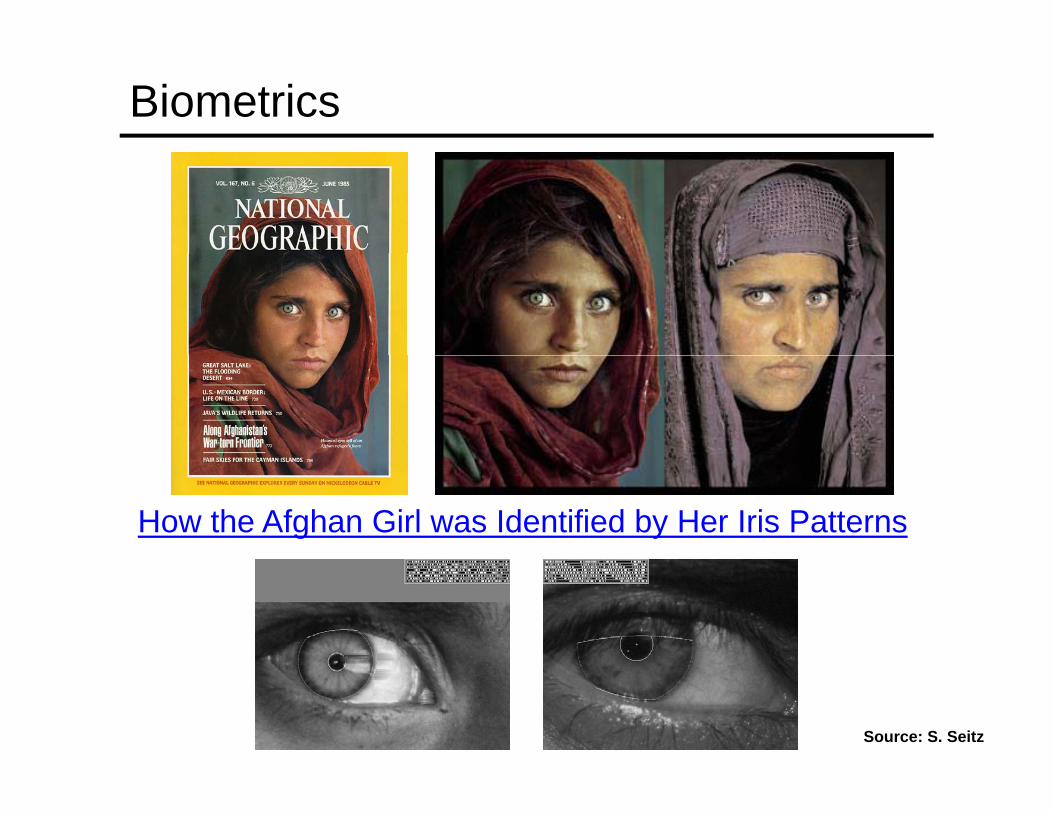
Biometrics
How the Afghan Girl was Identified by Her Iris Patterns
Source: S. Seitz
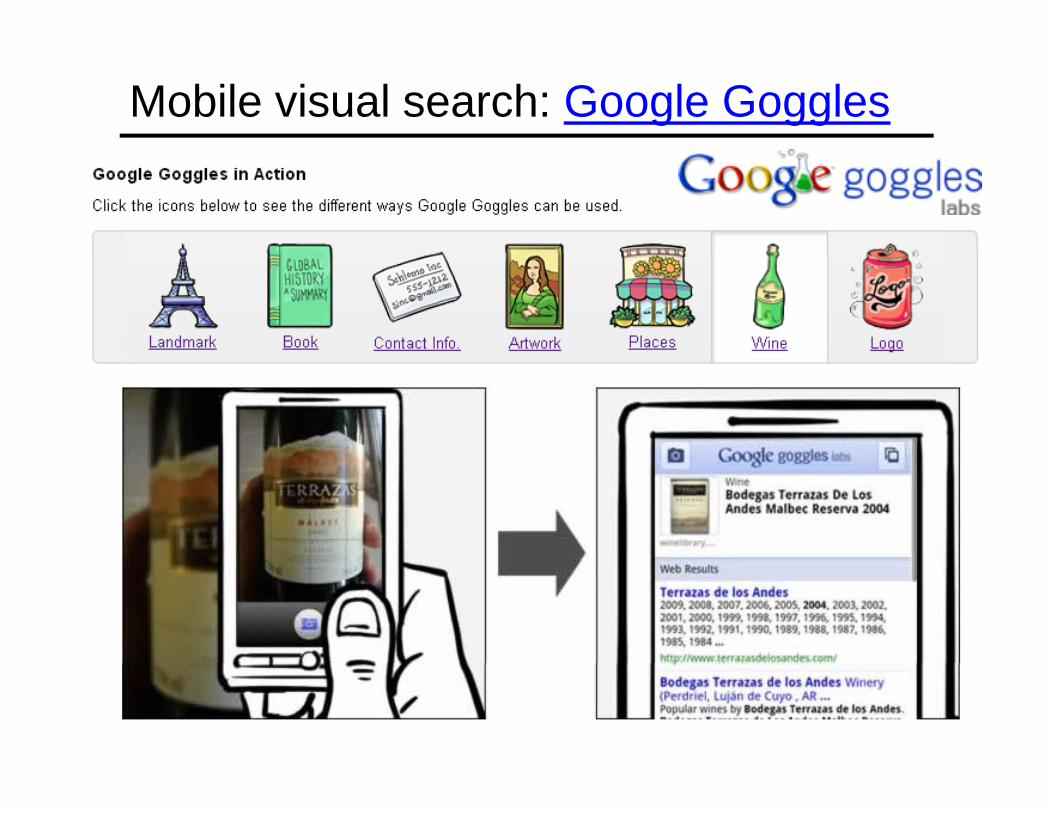
Mobile visual search: Google Goggles
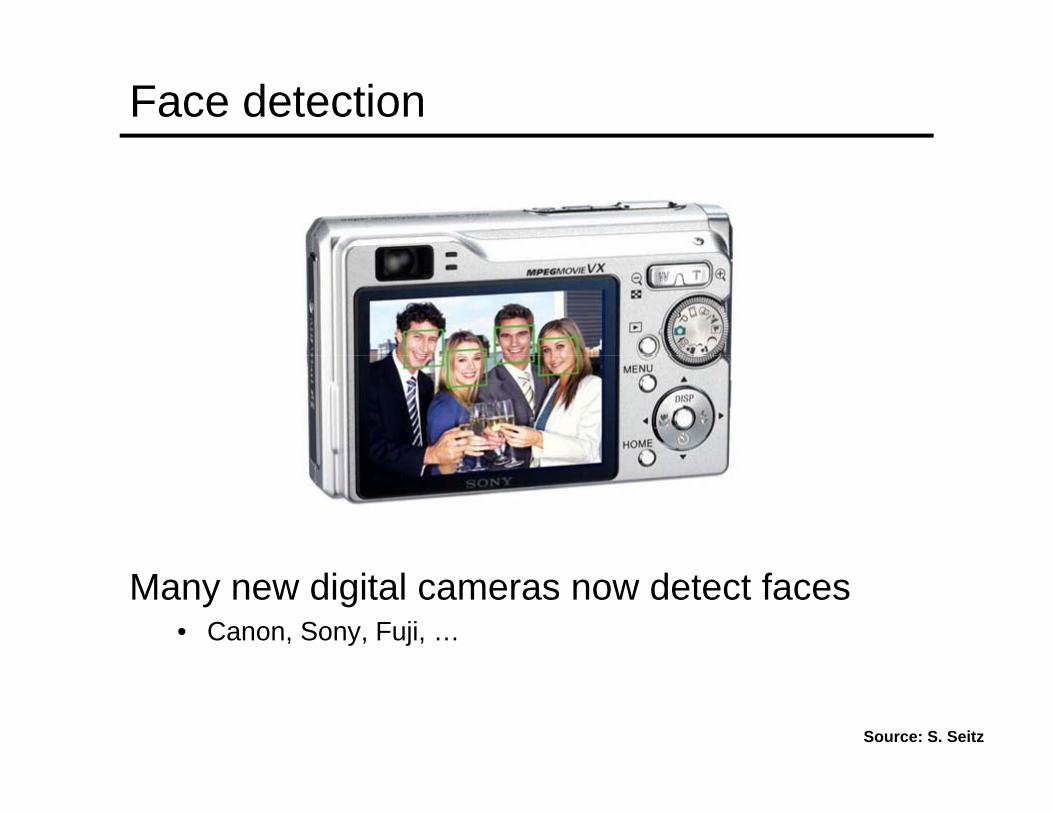
Face detection
Many new digital cameras now detect faces• Canon, Sony, Fuji, …
Source: S. Seitz
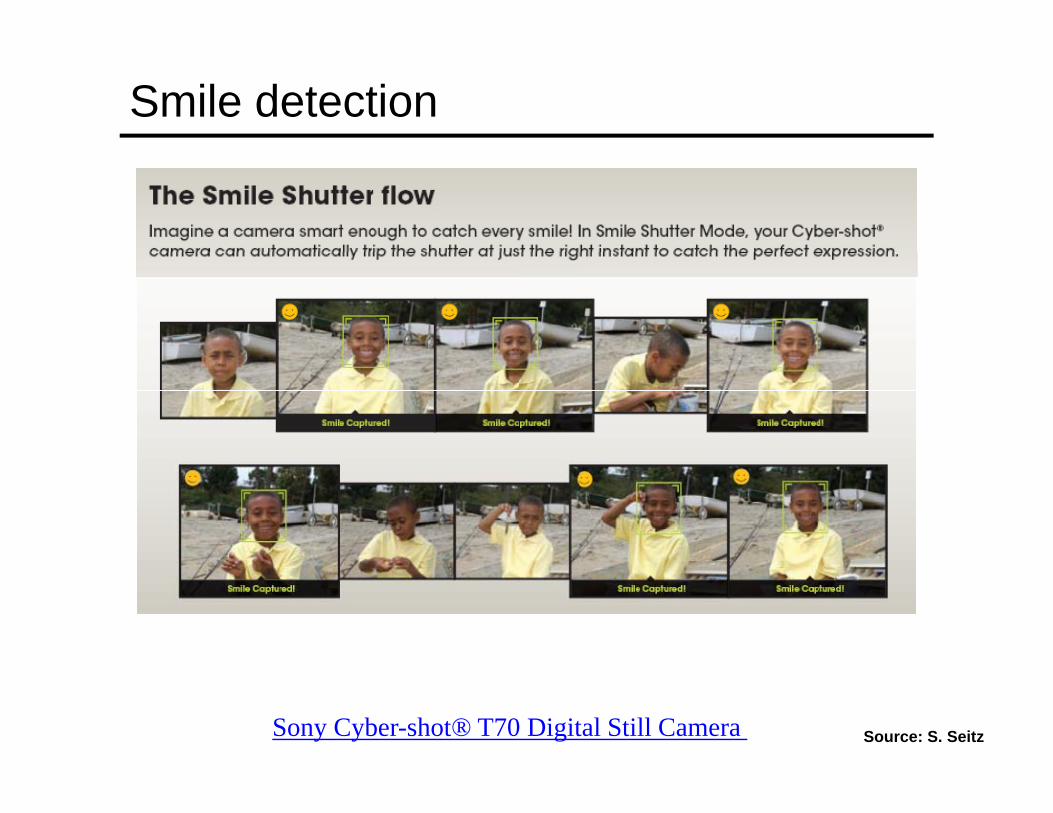
Smile detection
Sony Cyber-shot® T70 Digital Still Camera Source: S. Seitz

Face recognition: Apple iPhoto software
http://www.apple.com/ilife/iphoto/
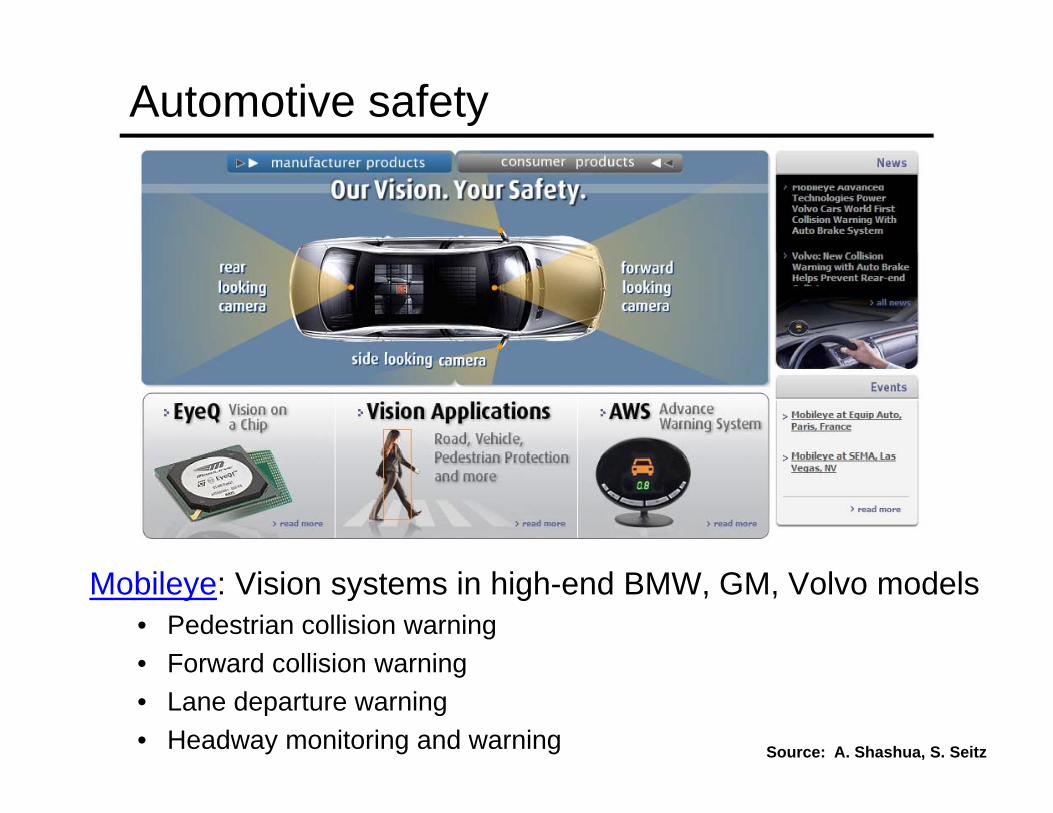
Automotive safety
Mobileye: Vision systems in high-end BMW, GM, Volvo models • Pedestrian collision warning• Forward collision warning• Forward collision warning• Lane departure warning• Headway monitoring and warning Source: A. Shashua, S. Seitz
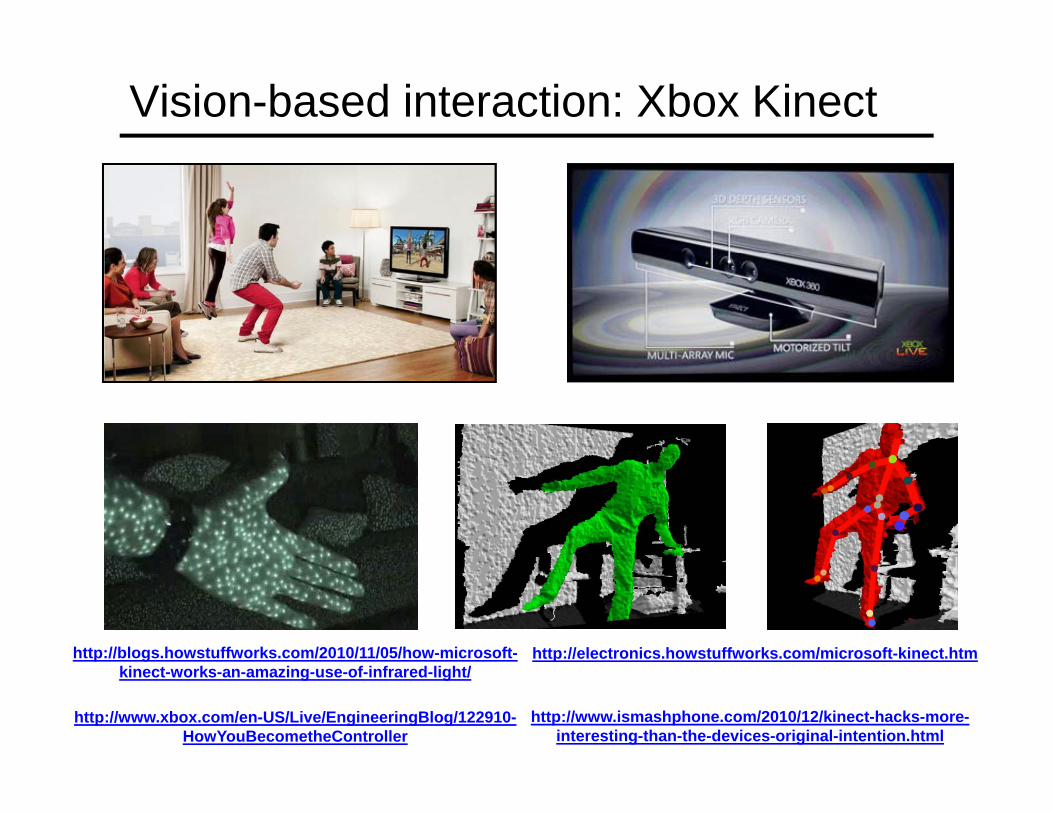
Vision-based interaction: Xbox Kinect
http://electronics.howstuffworks.com/microsoft-kinect.htmhttp://blogs.howstuffworks.com/2010/11/05/how-microsoft-
http://www.xbox.com/en-US/Live/EngineeringBlog/122910-HowYouBecometheController
kinect-works-an-amazing-use-of-infrared-light/
http://www.ismashphone.com/2010/12/kinect-hacks-more-interesting-than-the-devices-original-intention.html
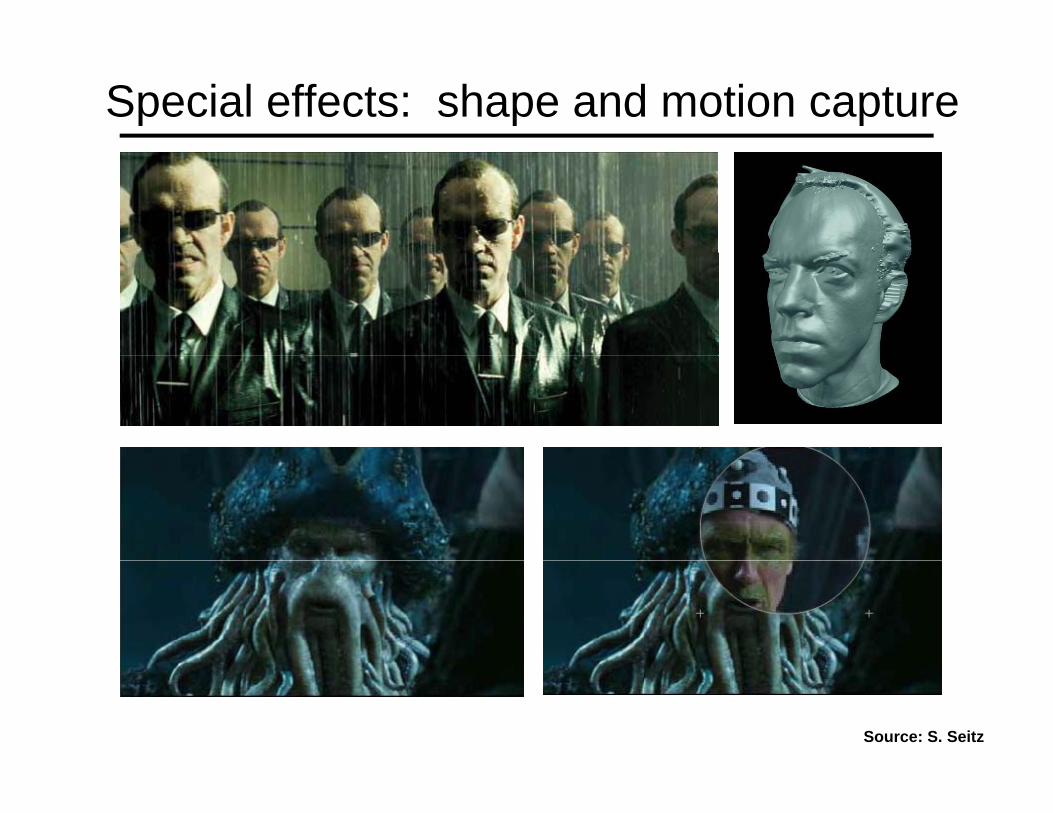
Special effects: shape and motion capture
Source: S. Seitz
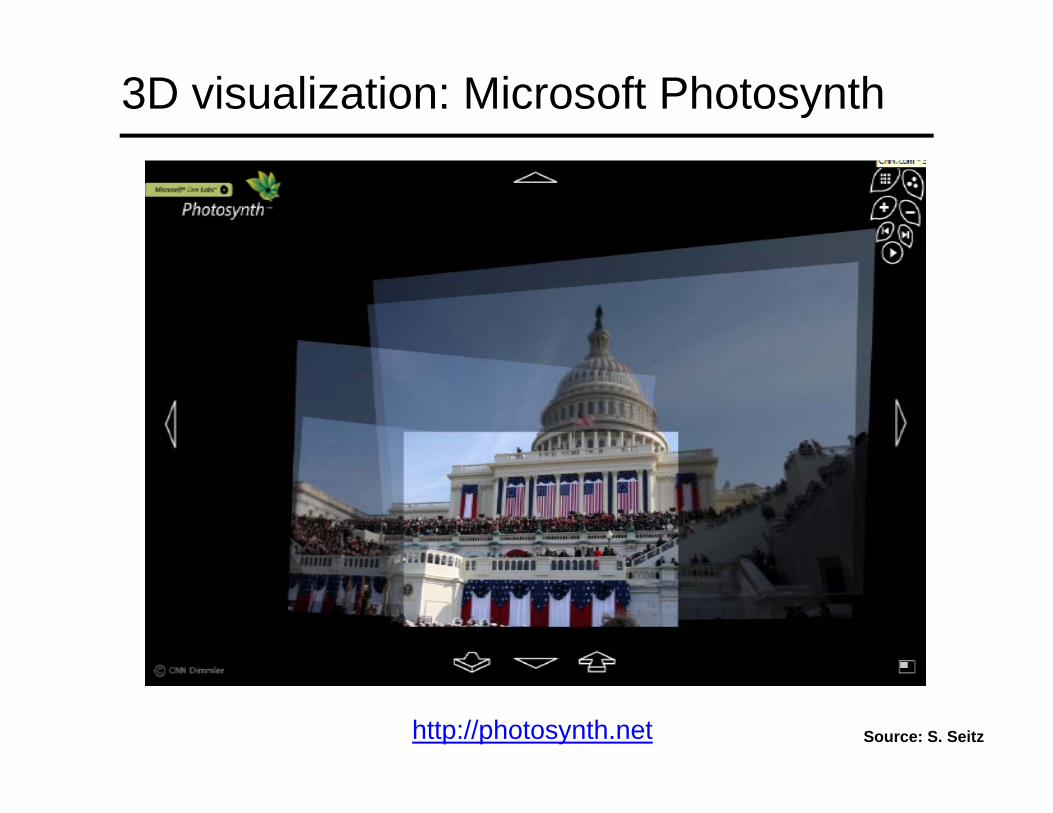
3D visualization: Microsoft Photosynth
http://photosynth.net Source: S. Seitz
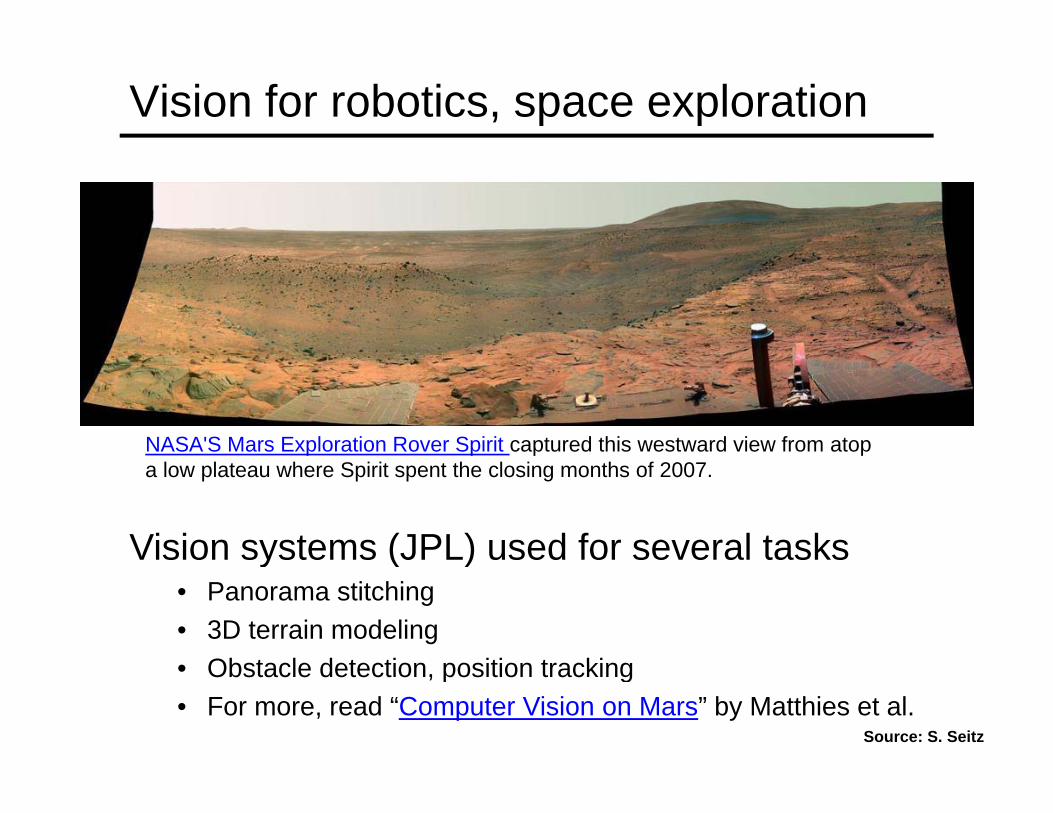
Vision for robotics, space exploration
NASA'S Mars Exploration Rover Spirit captured this westward view from atop
Vision systems (JPL) used for several tasks
a low plateau where Spirit spent the closing months of 2007.
y ( )• Panorama stitching• 3D terrain modeling
Obstacle detection position tracking• Obstacle detection, position tracking• For more, read “Computer Vision on Mars” by Matthies et al.
Source: S. Seitz
The computer vision industryThe computer vision industry
A li t f i h• A list of companies here:
http://www.cs.ubc.ca/spider/lowe/vision.htmlp p
Basic InfoBasic Info• Instructor: Svetlana Lazebnik (lazebnik@cs unc edu)• Instructor: Svetlana Lazebnik ([email protected])• Office hours: By appointment, FB 244• Class webpage: http://www.cs.unc.edu/~lazebnik/spring11Class webpage: http://www.cs.unc.edu/ lazebnik/spring11
• Textbooks (suggested): F h & P C t Vi i A M d A hForsyth & Ponce, Computer Vision: A Modern ApproachRichard Szeliski, Computer Vision: Algorithms and Applications (available online)pp ( )
Course requirementsCourse requirements• Philosophy: computer vision is best experienced hands-onPhilosophy: computer vision is best experienced hands on
• Programming assignments: 50%– About four assignments– Expect the first one in the next couple of classes– Brush up on your MATLAB skills (see web page for tutorial)
• Final assignment: 30% – Recognition competitionRecognition competition– Winner gets a prize!
• Participation: 20%• Participation: 20% – Come to class regularly– Ask questions
A ti– Answer questions
Collaboration policyCollaboration policy
F l f t di i t ith h th b t di• Feel free to discuss assignments with each other, but coding must be done individually
• Feel free to incorporate code or tips you find on the Web, provided this doesn’t make the assignment trivial and you explicitly acknowledge your sourcesexplicitly acknowledge your sources
• Remember: I can Google too (and I have the copies of g ( peverybody’s assignments from the last three years this class was offered)
Course overviewCourse overview
I E l i i I f ti d iI. Early vision: Image formation and processingII. Mid-level vision: Grouping and fittingIII Multi view geometryIII. Multi-view geometryIV. RecognitionV. Advanced topicsd a ced top cs
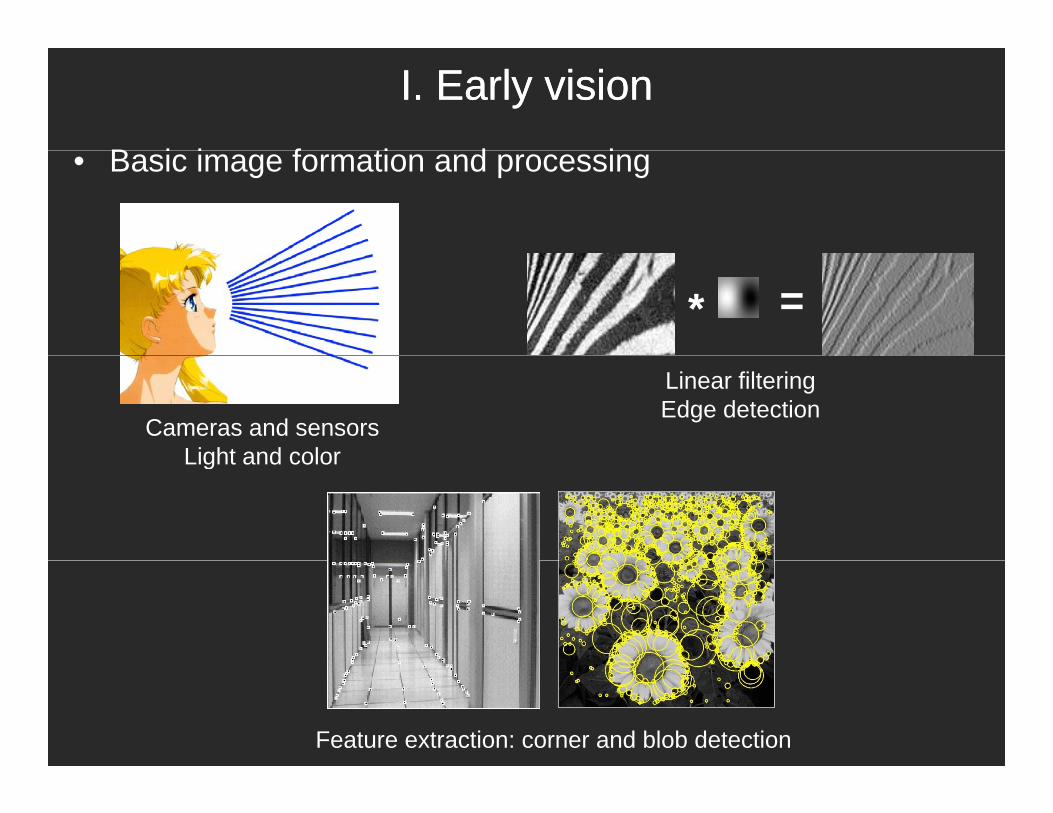
I. Early visionI. Early vision
B i i f ti d i• Basic image formation and processing
* =
Cameras and sensorsLight and color
Linear filteringEdge detection
Light and color
Feature extraction: corner and blob detection
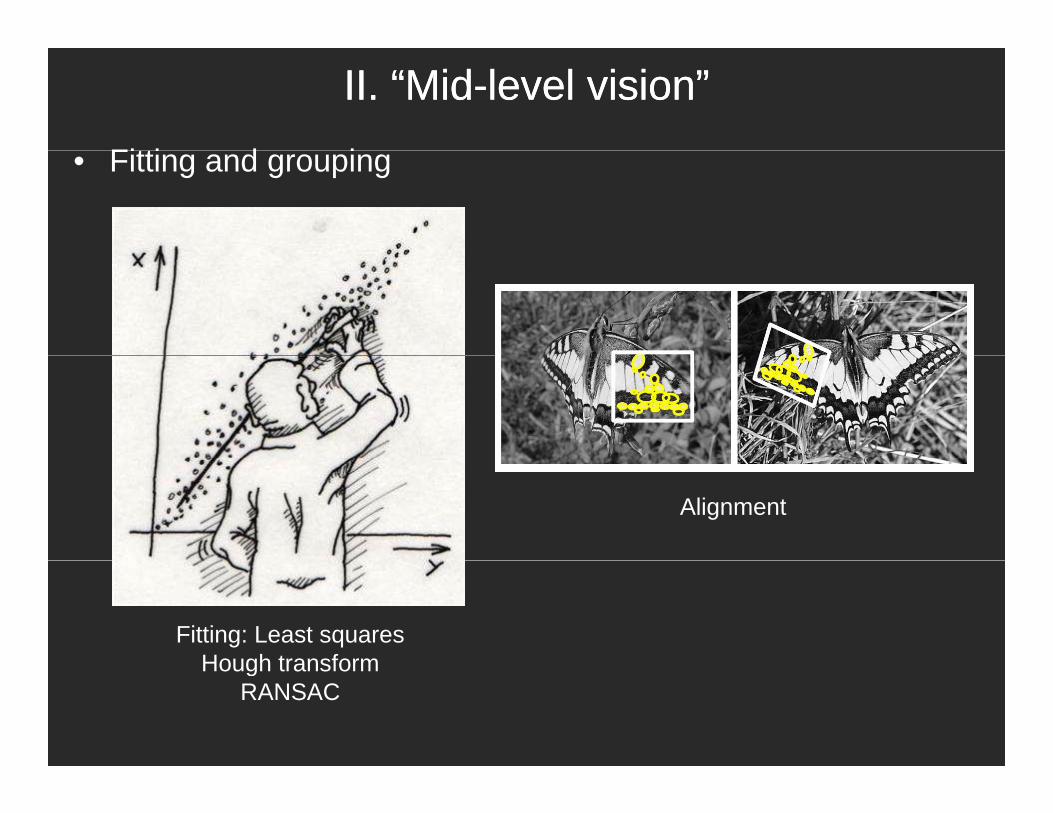
II. “MidII. “Mid--level vision”level vision”
Fitti d i• Fitting and grouping
Alignment
Fitting: Least squaresHough transformHough transform
RANSAC
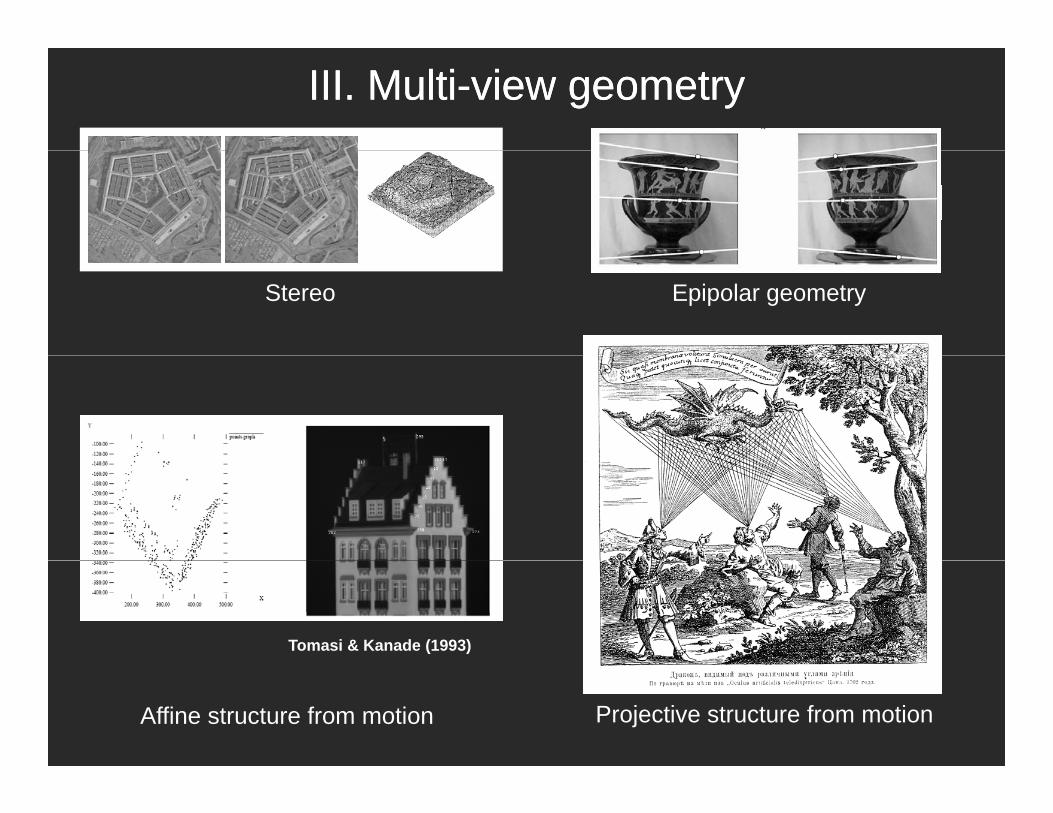
III. MultiIII. Multi--view geometryview geometry
Stereo Epipolar geometry
Tomasi & Kanade (1993)
Projective structure from motionAffine structure from motion

IV. RecognitionIV. Recognition
Patch description and matching Clustering and visual vocabularies
Bag-of-features models ClassificationBag of features models
Sources: D. Lowe, L. Fei-Fei
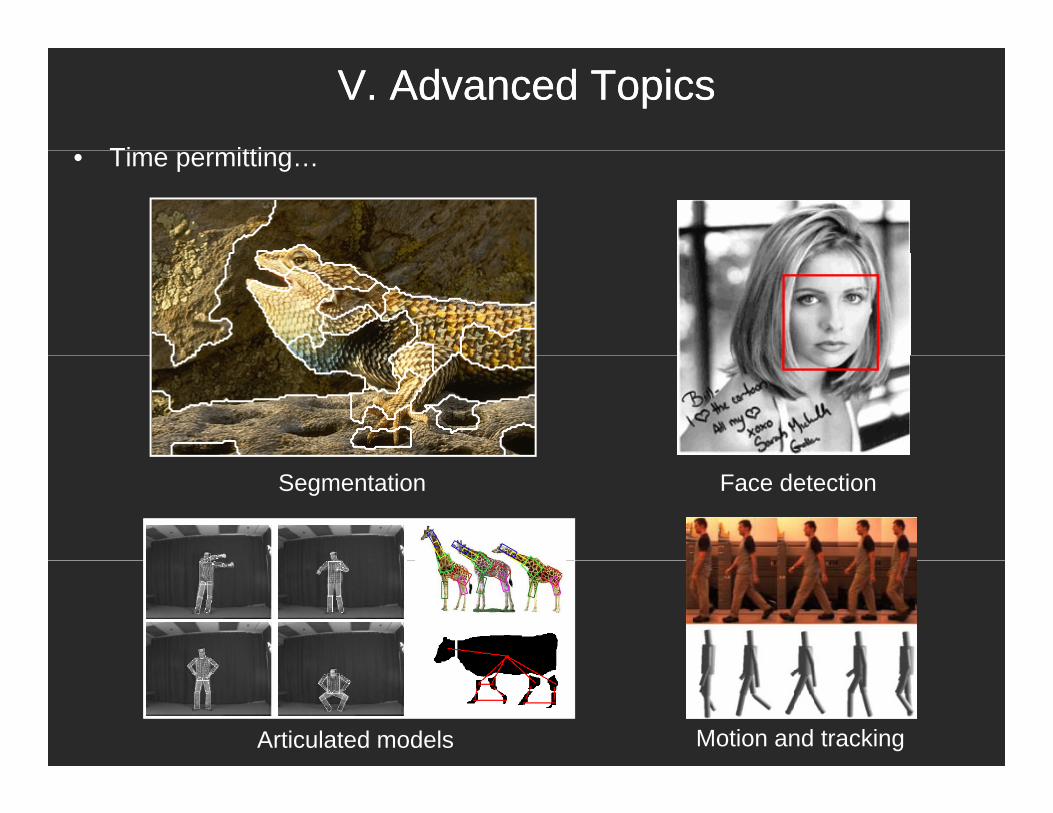
V. Advanced TopicsV. Advanced TopicsTi itti• Time permitting…
Segmentation Face detection
Articulated models Motion and tracking