comp 9517 computer vision - webcms3 comp 9517 s2 2010comp9517 s2 2016 13 chapter 3 image enhancement...
TRANSCRIPT

01/08/2016 COMP9517 S2 2016 1
COMP 9517 Computer Vision
Image Processing

01/08/2016 COMP9517 S2 2016 2
Image Analysis • Manipulation of image data to extract the information
necessary for solving an imaging problem • It is a data reduction process. • Consists of preprocessing, data reduction and feature
analysis • Preprocessing removes noise, eliminates irrelevant
information • Data reduction extracts features for the analysis process • During feature analysis, the extracted features are
examined and evaluated for their use in the application

01/08/2016 COMP9517 S2 2016 3
Image Preprocessing • Input and output are intensity images
• Aim to improve image, by suppressing distortions and enhancing image features, so that result is more suitable for a specific application
• Exploit redundancy in image: for example, neighbouring pixels have similar brightness value.
• Spatial and frequency domain techniques.

01/08/2016 COMP9517 S2 2016 4
4
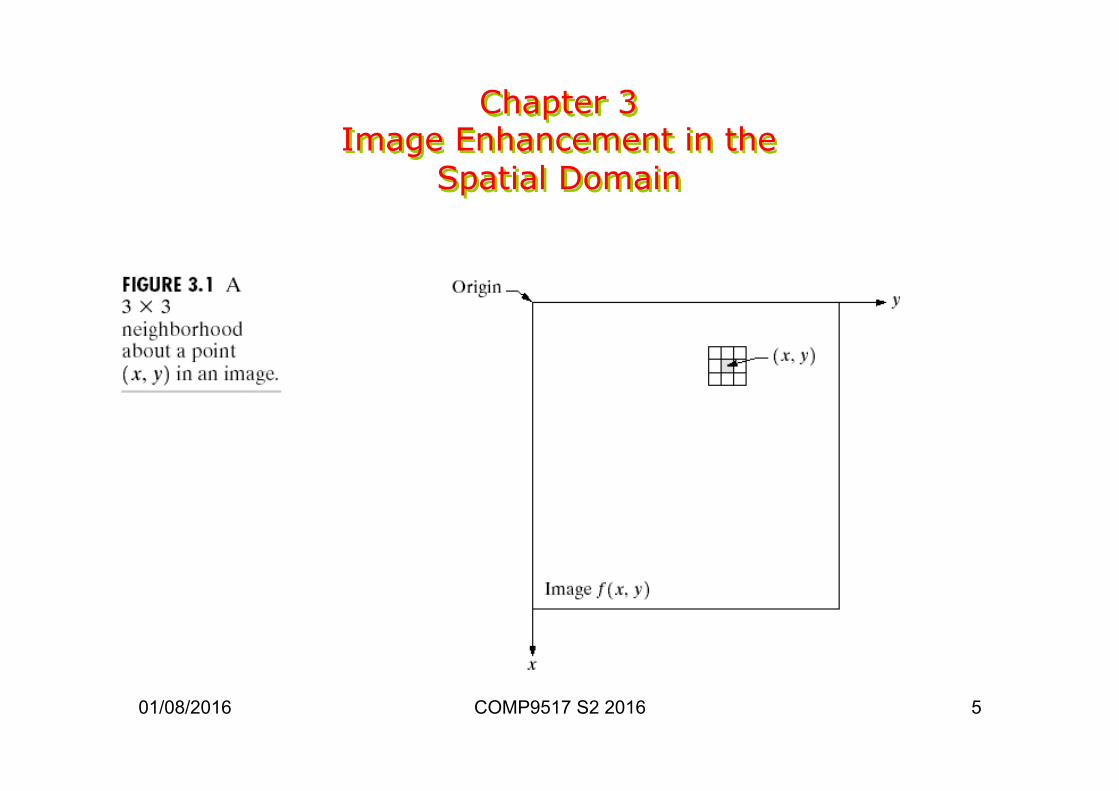
Spatial Domain Techniques • Operate directly on image pixels: g (x, y) = T [ f(x, y) ] where
– f (x,y) is the input image – g(x, y) is the processed image – T is an operator on f, over a nbd of (x, y), usually square or
rectangular nbd used. • When T is of size 1 x 1, T becomes a gray-level
transformation function: s = T (r) • Examples are contrast stretching, thresholding
01/08/2016 COMP9517 S2 2016 5
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 6
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 7
Basic Gray level Transformations Image Negatives • For input image with gray levels in range [0, L-1] , the negative
transformation is s = L - 1 - r
• Produces equivalent of a photo negative • Useful for enhancing white or gray detail in dark regions of image, when
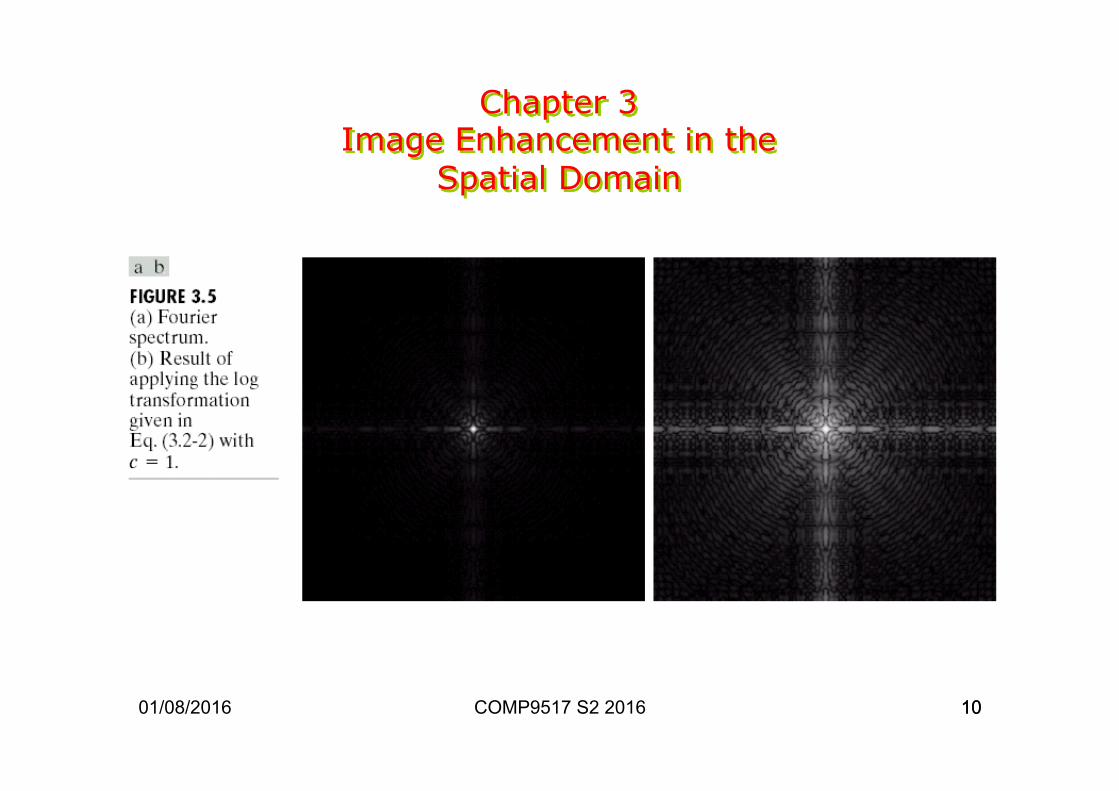
black areas are dominant Log Transformations s= c log (1 + r)
where c is constant, r >= 0 Maps narrow range of low gray-level values into wider range of output values

01/08/2016 COMP9517 S2 2016 8
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 9
Chapter 3 Image Enhancement in the
Spatial Domain
01/08/2016 COMP9517 S2 2016 10
Chapter 3 Image Enhancement in the
Spatial Domain
10

01/08/2016 COMP9517 S2 2016 11
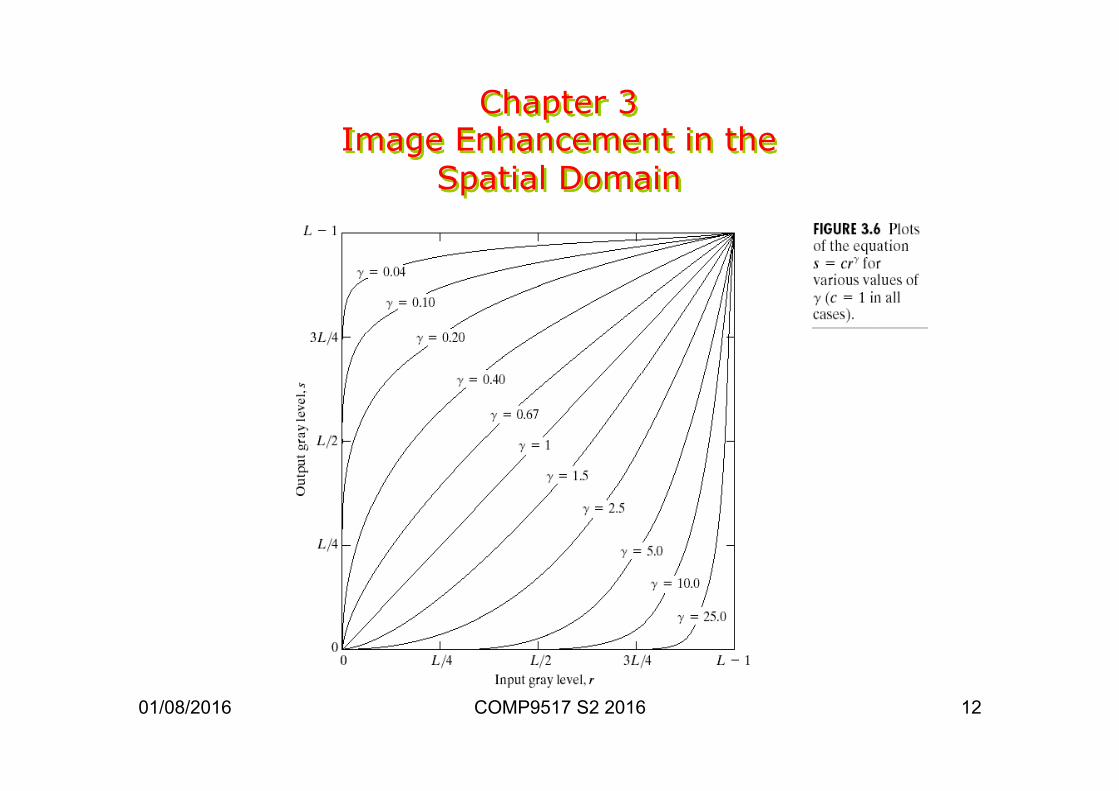
Power-Law Transformations • Given by s = c rγ where c, γ are constant • Similar to log transformation on input-output • Family of possible transformations by varying γ • Useful in displaying an image accurately on a
computer screen, for example on web sites!
01/08/2016 COMP9517 S2 2016 12
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 13
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 14
Chapter 3 Image Enhancement in the
Spatial Domain
01/08/2016 COMP9517 S2 2016 15
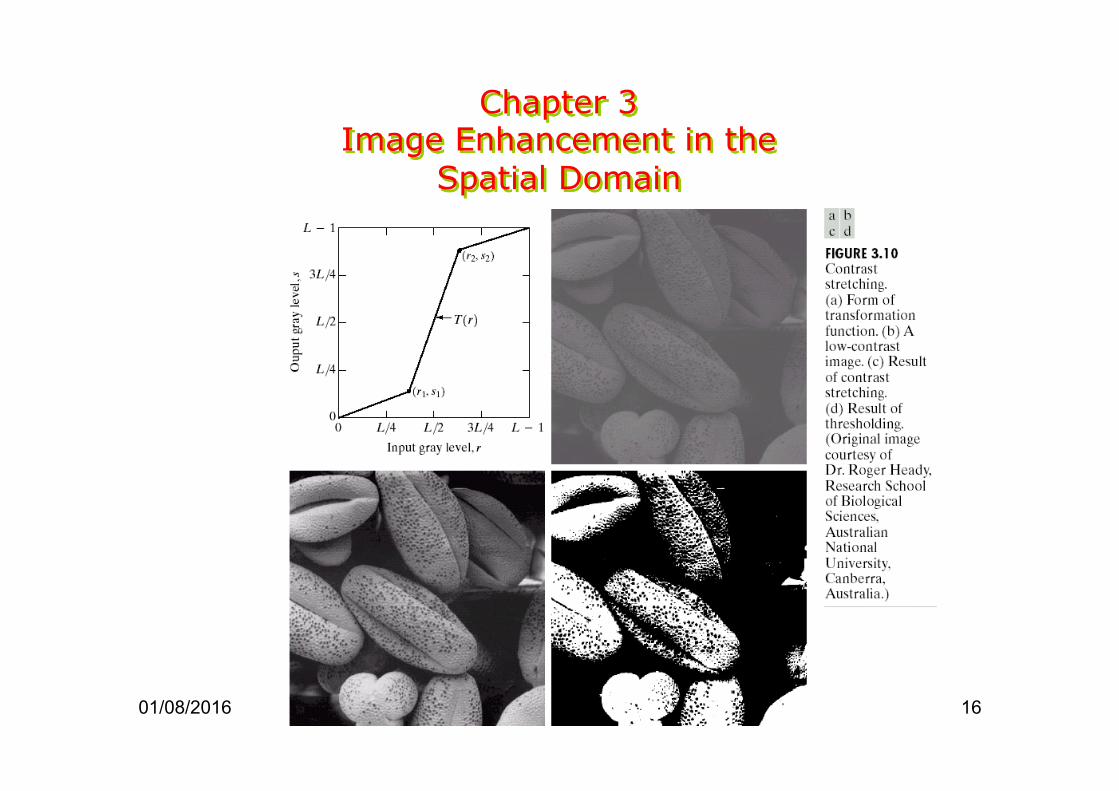
Piecewise-linear Transformations
Contrast Stretching • To increase dynamic range of gray levels
in image.
01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 16
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 17
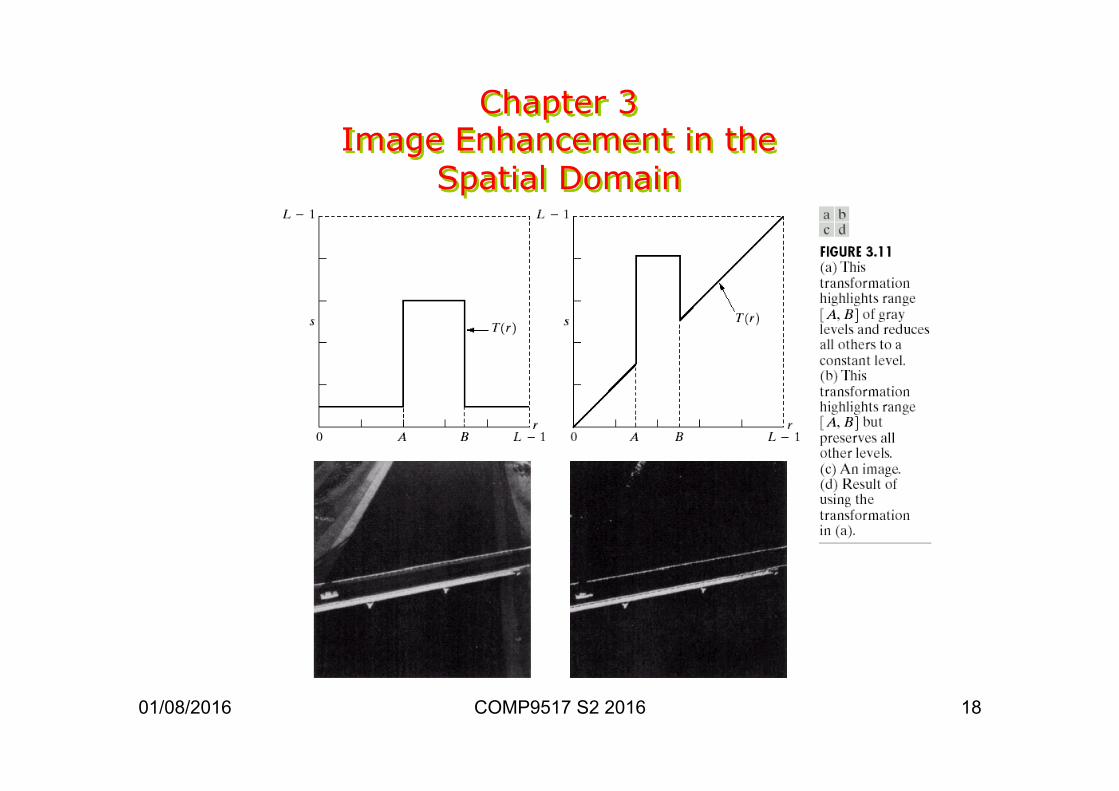
Gray-level Slicing • Highlighting of specific range of gray levels
1. Display high value for all gray levels in range of interest, and low value for all others
2. Brighten the desired range of gray levels, preserve background and other gray-scale tones of image
01/08/2016 COMP9517 S2 2016 18
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 19
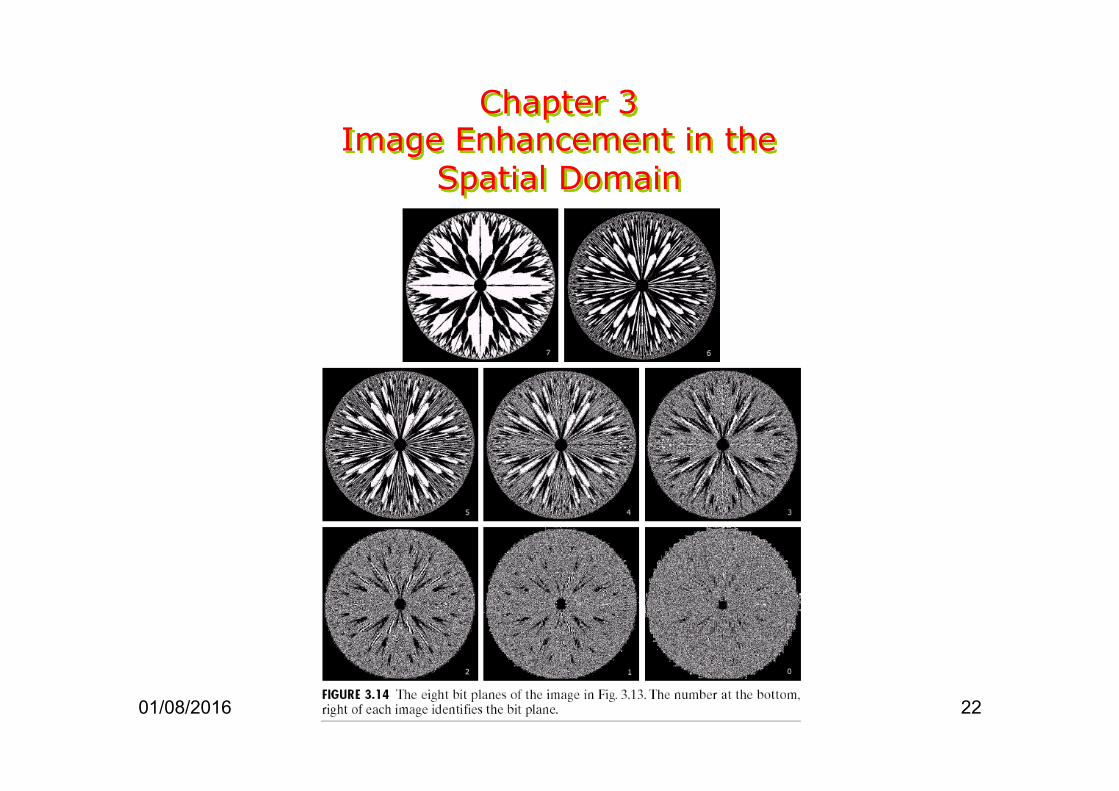
Bit-plane Slicing • Highlights contribution made to total image
appearance by specific bits • Eg, for an 8-bit image, there are 8 1-bit planes • Useful in compression

01/08/2016 COMP9517 S2 2016 20
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 21
Chapter 3 Image Enhancement in the
Spatial Domain
01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 22
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 23
Histogram Processing
Histogram Equalization Aim: To get an image with equally
distributed brightness levels over the whole brightness scale.

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 24
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 25
Histogram Processing (ctd)
Results: enhances contrast for brightness values near histogram maxima, decreases contrast near minima. Let r represent grey levels of the image. Let r be normalised in [0, 1], where r = 0 represents black r = 1 represents white

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 26
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 27
Histogram equalization We consider transformations of the form s = T (r), 0 ≤ r ≤ 1 Also assume that T(r) satisfies:
a) T (r) is single-valued and monotonically increasing in 0 ≤ r ≤ 1 b) 0 ≤ T(r) ≤ 1 for 0 ≤ r ≤ 1 c) guarantees that the inverse transformation exists, and monotonicity
preserves pixel order d) guarantees that output grey levels will be in the same range as input
levels
01/08/2016 COMP9517 S2 2016 28
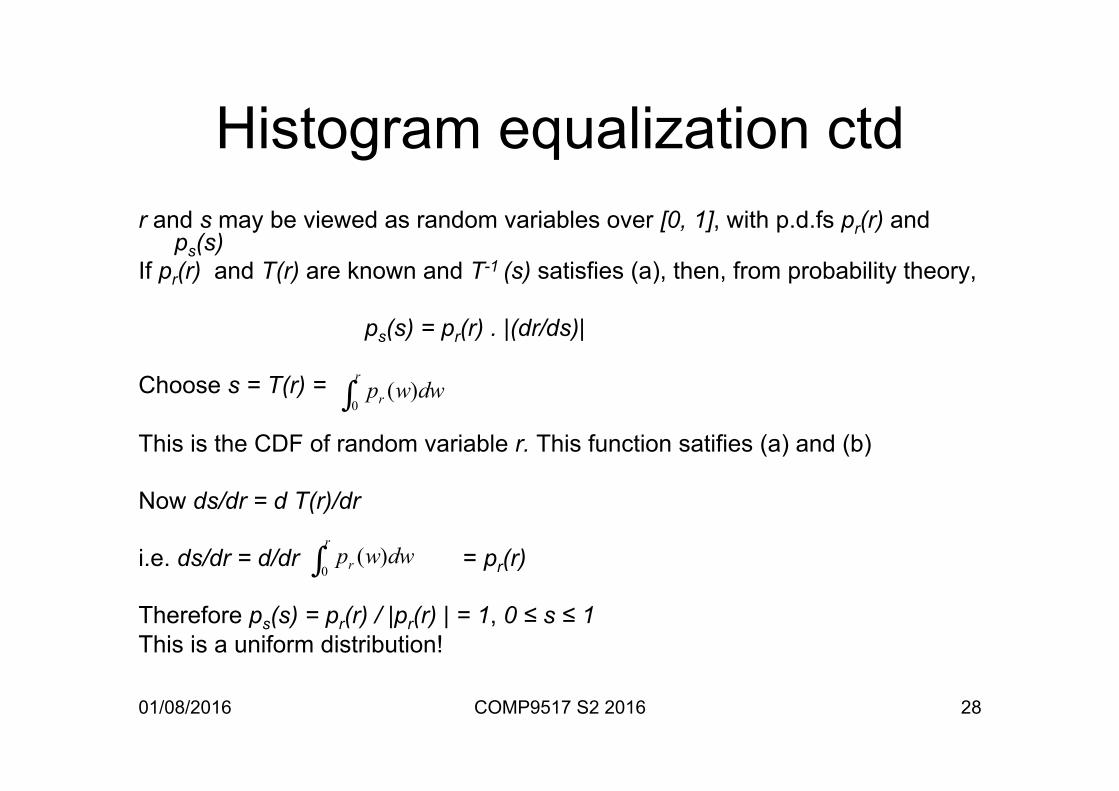
Histogram equalization ctd r and s may be viewed as random variables over [0, 1], with p.d.fs pr(r) and
ps(s) If pr(r) and T(r) are known and T-1 (s) satisfies (a), then, from probability theory,
ps(s) = pr(r) . |(dr/ds)|
Choose s = T(r) = This is the CDF of random variable r. This function satifies (a) and (b) Now ds/dr = d T(r)/dr i.e. ds/dr = d/dr = pr(r) Therefore ps(s) = pr(r) / |pr(r) | = 1, 0 ≤ s ≤ 1 This is a uniform distribution!
dwwpr
r )(0∫
dwwpr
r )(0∫

01/08/2016 COMP9517 S2 2016 29
Histogram equalization ctd For discrete values, we get probabilities and summations instead of p.d.fs and integrals: pr(rk) = nk / n , k = 0, 1,..., L-1 where n is total number of pixels in image, nk is number of pixels with gray level rk and L is total number of gray levels So sk = T (rk) = , k = 0, 1,..., L-1 This transformation is called histogram equalization
∑∑==
=k
j
jj
k
jr n
nrp
00)(

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 30
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 31
Arithmetic/Logic Operations
• On pixel-by-pixel basis between 2 or more images
• AND and OR operations are used for masking- selecting subimages as RoI
• Subtraction and addition are the most useful arithmetic operations

01/08/2016 COMP9517 S2 2016 32
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 33
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 34
Image Averaging • Noisy image g (x, y) formed by adding noise n (x, y) to uncorrupted
image f (x, y): g (x, y) = f (x, y) + n (x, y) • Assume that at each (x, y), the noise is uncorrelated and has zero
average value. • Aim: To obtain smoothed result by adding a set of noisy images
gi (x, y), i = 1, 2, ..., K
g (x ,y)
• As K increases, the variability of the pixel values decreases
• Assumes that images are spatially registered
∑=
≈K
ii yxg
K 1
),(1

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 35
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 36
Spatial Filtering • These methods use a small neighbourhood of a pixel in the input
image to produce a new brightness value. • Also called filtering techniques • Neighbourhood of (x, y) is usually a square or rectangular subimage
centred at (x, y) • A linear transformation calculates a value in the output image g (i, j)
as a linear combination of brightnesses in a local neighbourhood of the pixel in the input image f (i, j), weighted by coefficients h:
g (i, j) = • This is a discrete convolution with a convolution mask h
∑∑ −− ),(),( nmfnjmih

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 37
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 38
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 39
Example Consider an image of constant intensity, with widely isolated pixels with different intensity from the background. We wish to detect these pixels. Use the following mask: -1 -1 -1 -1 8 -1 -1 -1 -1 Smoothing • Aim: To suppress noise, other small fluctuations in image- may be
result of sampling, quantization, transmission, environment disturbances during acquisition
• Uses redundancy in the image data • May blur sharp edges, so care is needed

01/08/2016 COMP9517 S2 2016 40
Neighbourhood Averaging g (x, y) =
• Replace intensity at pixel (x, y) with the average of the intensities in a neighbourhood of (x, y).
• We can also use a weighted average, giving more importance to some pixels over others in the neighbourhood.
• Neighbourhood averaging (also called mean filter) blurs edges.
∑∈Smn
mnfP ),(
),(1

01/08/2016 COMP9517 S2 2016 41
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 42
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 43
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 44
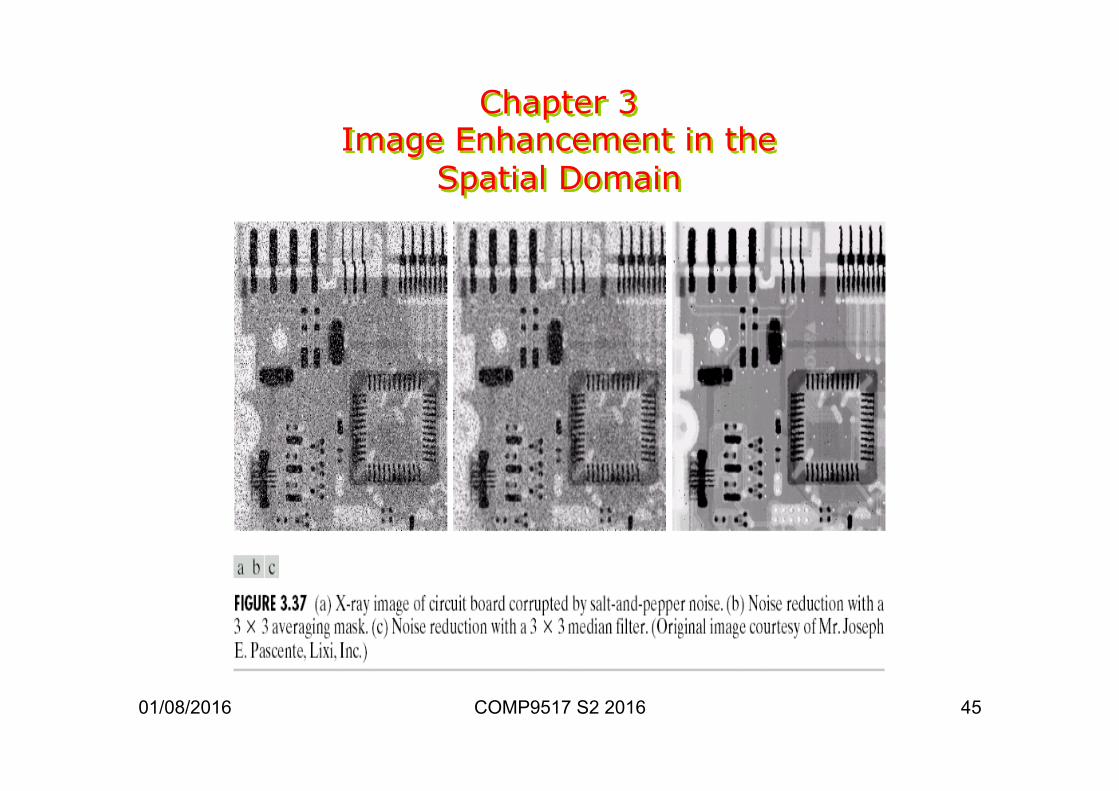
Order-Statistics Filters • Nonlinear spatial filters- response based on ordering the pixels in
the neighbourhood, and replacing centre value with the ranking results.
Median Filter • In median filtering, intensity of each pixel is replaced by the median • of the intensities in a neighbourhood of the pixel • Median M of a set of values is the middle value such that half the
values in the set are less than M and the other half greater than M • Median filtering forces points with distinct intensities to be more like
their neighbours, thus eliminating isolated intensity spikes • Good for impulse noise (salt-and-pepper noise) • Other examples are max and min filters
01/08/2016 COMP9517 S2 2016 45
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 46
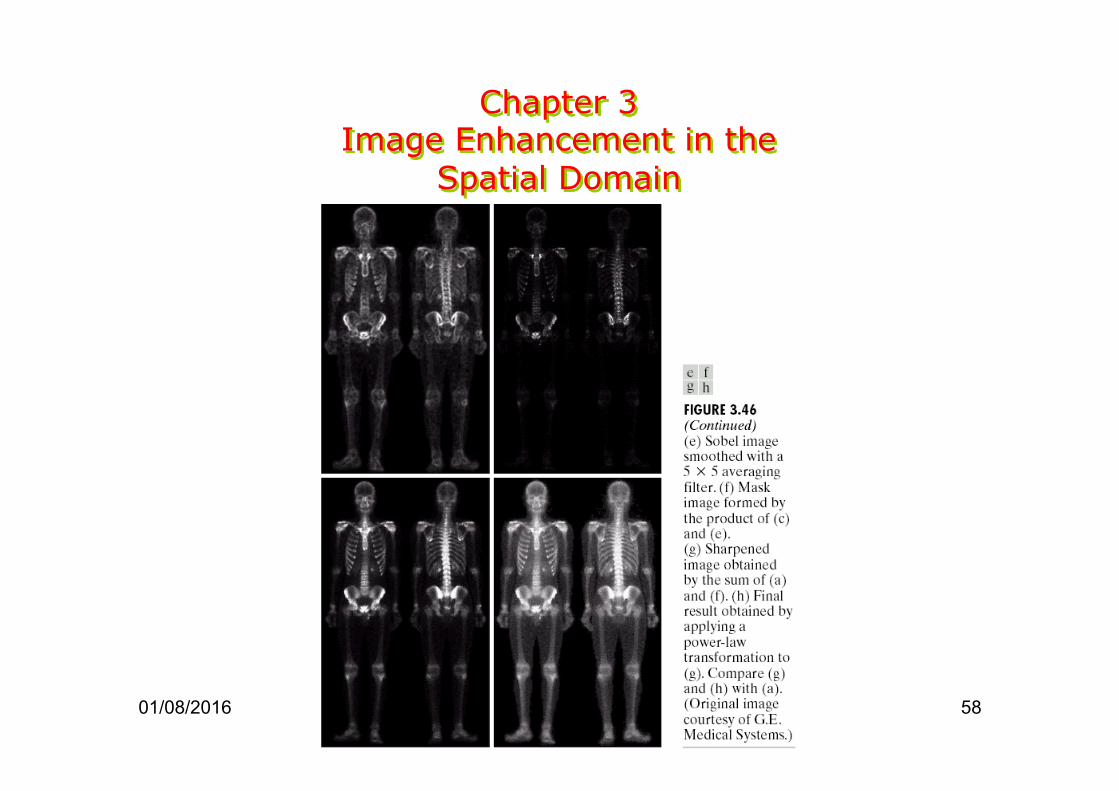
Sharpening Spatial Filters-Edge Detection
• Goal is to highlight fine detail, or enhance detail that has been blurred
• Spatial differentiation is the tool- strength of response of derivative operator is proportional to degree of discontinuity of the image at the point where operator is applied
• Image differentiation enhances edges, and deemphasizes slowly varying gray-level values.

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 47
Chapter 3 Image Enhancement in the
Spatial Domain
01/08/2016 COMP9517 S2 2016 48
Basic idea • Horizontal scan of the image • Edge modelled as a ramp- to represent blurring due to
sampling • First derivative is 0 in regions of constant intensity,
constant during an intensity transition • Second derivative is zero everywhere except at onset
and termination of intensity transition • Thus, magnitude of first derivative can be used to detect
the presence of an edge, and sign of second derivative to determine whether a pixel lies on dark or light side of an edge.

01/08/2016 COMP9517 S2 2016 49
Gradient Operator Gx and Gy may be obtained by using masks- Sobel Operators. The magnitude of the gradient vector is G [ f(x, y) ] = This is commonly approximated by: G [ f(x, y) ] = | Gx | + | Gy | Now use numerical techniques to compute these Roberts’ 2x2 cross-gradient operators, Sobel’s 3x3 masks
22yx GG +

01/08/2016 COMP9517 S2 2016 50
Chapter 3 Image Enhancement in the
Spatial Domain
50

01/08/2016 COMP9517 S2 2016 51
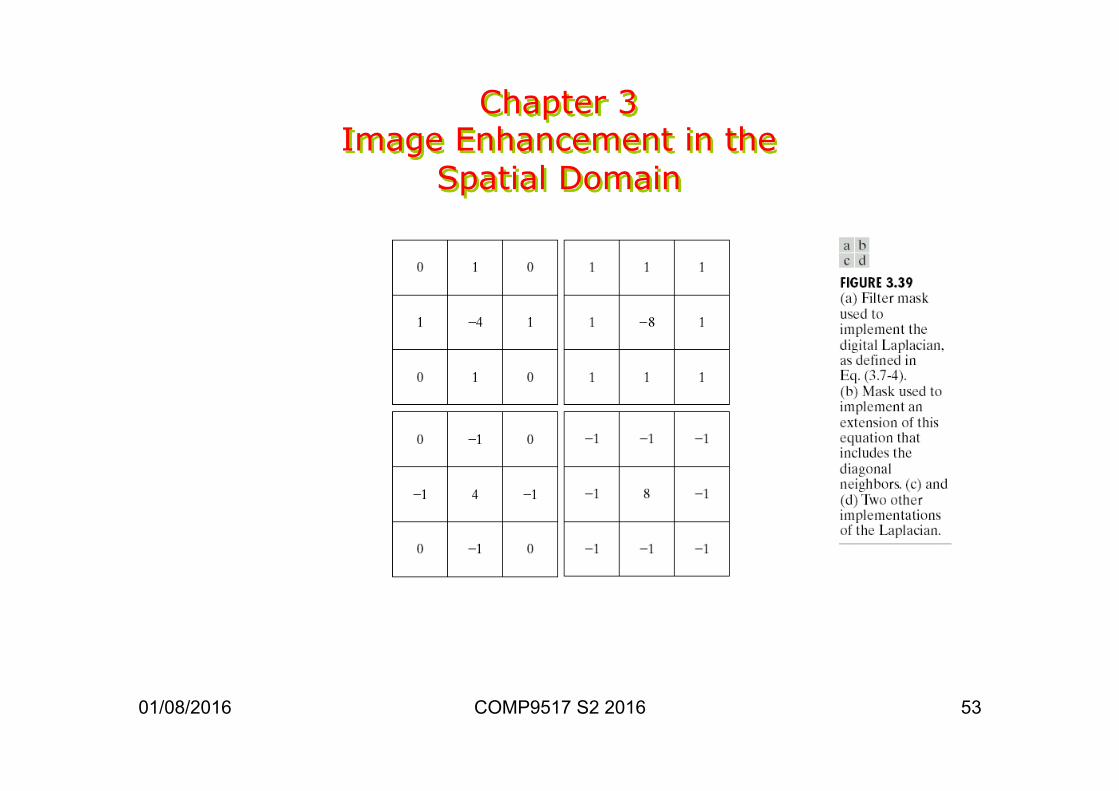
The Laplacian For a function f (x, y), the Laplacian is defined by This is a linear operator, as all derivative operators are. In discrete form: and similarly in y direction. Summing them gives us
2
2
2
22
yf
xff
∂
∂+
∂
∂=Δ
),(2),1(),1(2
2
yxfyxfyxfxf
−−++=∂
∂
),(4)]1,()1,(),1(),1([2 yxfyxfyxfyxfyxf −−+++−++=Δ

01/08/2016 COMP9517 S2 2016 52
Laplacian ctd • There are other forms of the Laplacian- can include
diagonal directions, for example. • Laplacian highlights grey-level discontinuities and
produces dark featureless backgrounds. • The background can be recovered by adding or
subtracting the Laplacian image to the original image.
01/08/2016 COMP9517 S2 2016 53
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 54
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 55
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 56
Chapter 3 Image Enhancement in the
Spatial Domain

01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 57
Chapter 3 Image Enhancement in the
Spatial Domain
01/08/2016 COMP9517 S2 2016 COMP 9517 S2 2010 58
Chapter 3 Image Enhancement in the
Spatial Domain
01/08/2016 COMP9517 S2 2016
References and Acknowledgements
• Chapter 3, Gonzalez and Woods 2002 • Szeliski 3.1-3.3 • Images drawn from Gonzalez and Woods,
2002
59