computer vision: object recognition with deep …...computer vision: object recognition with deep...
TRANSCRIPT

Computer Vision: Object recognition with deep learning
applied to fashion items detection in images
by
Hélder Filipe de Sousa Russa
Dissertation for achieving the degree of
Master in Data Analysis
Dissertation supervisor: Professor João Manuel Portela da Gama
September 2017

2

3
Biography
Hélder Filipe de Sousa Russa, born in Porto, Portugal on May 13th of 1989. Completed
his licentiate degree in Technologies and Information Systems in 2013 at Universidade
Portucalense and later entered and concluded the post-graduate studies in Information
Systems at the same university.
With almost 4 years of professional experience all his career choices always had as
main goal to be involved in data management and manipulation passing the last 3 years
working as a Data Engineer in the Business Intelligence team at Jumia Mall company
where had as main responsibilities the development and maintenance of the company’s
data warehouse as well as the reports on top of analysis tools.
Currently, works as a Senior BI and Data Engineer in The HUUB company having as
the main responsibility develop and maintain the company data warehouse.

4
Abstract
Recognizing and detecting an object in an image is one of the main challenges of
computer vision systems due to the variations that each object or the specific image,
where the object is presented, could have like the illumination or viewpoint.
Concerning this and by following multiple studies recurring to deep learning with the
use of Convolution Neural Networks on detecting and recognizing objects that showed
high level of accuracy and precision on these tasks, this work will follow them and
develop an experimental system on top of Fast R-CNN algorithm to classify and locate
specific fashion items in static images.
After the system development, it was possible to conclude that Convolution Neural
Networks are indeed a good option for these type of problems, since, even with a dataset
of around 4400 distinct images, it was achieved a mean average precision of 65%.
Specifically, focus on Fast R-CNN, algorithm it was interesting to analyze its
improvements on training time when compared with old CNNs algorithms enabling that
new experiments could be done during the training and testing phase.
Keywords: Deep learning; Convolutional Neural Networks; Object recognition; Object
detection; Fast R-CNN

5
Table of contents
Biography 3
Abstract 4
Table of contents .................................................................................... 5
List of figures ......................................................................................... 7
List of tables ........................................................................................... 7
Chapter 1 - Introduction ........................................................................ 9
1.1 Motivation .............................................................................................................. 9
1.2 Objectives ............................................................................................................. 10
1.3 Questions of study ................................................................................................ 10
Chapter 2 - Literature review .............................................................. 11
2.1 Classical Object Recognition ................................................................................. 11
2.1.1 Common object recognition system ................................................................. 12
2.1.2 Object recognition techniques ......................................................................... 13
2.2 Deep Learning ....................................................................................................... 15
2.2.1 Convolutional Neural Networks Individual Concepts ....................................... 15
2.2.2 Convolutional Neural Networks Basic Structure............................................... 17
2.3 Fast R-CNN for Object Recognition and Detection ............................................... 19
2.4 Related Work ........................................................................................................ 21
2.4.1 Image Classification with Deep CNNs ............................................................... 21
2.4.2 Visual Search at Pinterest ................................................................................. 22
Chapter 3 - System Implementation .................................................... 23
3.1 Development Plan Overview ................................................................................ 23
3.2 System architecture .............................................................................................. 24
3.3 Technology Stack .................................................................................................. 25
3.4 Image annotation ................................................................................................. 26
3.5 System components ............................................................................................. 28
3.5.1 System folder tree ............................................................................................ 29

6
3.5.2 Parameters ....................................................................................................... 31
3.5.3 Generate Input ROIs component ...................................................................... 32
3.5.4 Train Fast R-CNN model component ................................................................ 34
3.5.5 Evaluate Results component ............................................................................ 35
Chapter 4 - Results Evaluation ............................................................ 39
4.1 Train and test data ................................................................................................ 40
4.2 Model Training Time Analysis ............................................................................... 42
4.3 Recognition and Detection Results Analysis ......................................................... 43
4.3.1 Test200_001 ..................................................................................................... 45
4.3.2 Test200_03 ....................................................................................................... 46
4.3.3 Test200_05 ....................................................................................................... 47
4.3.4 Test2000_001 ................................................................................................... 48
4.3.5 Test2000_03 ..................................................................................................... 49
4.3.6 Test2000_05 ..................................................................................................... 50
4.3.7 Test4000_001 ................................................................................................... 51
4.3.8 Test4000_03 ..................................................................................................... 52
4.3.9 Test4000_05 ..................................................................................................... 53
4.4 System Cross Results Analysis............................................................................... 54
Chapter 5 - Conclusion and Future Work ............................................ 57
Bibliography......................................................................................... 59
Appendices 62
5.1 Appendix A – Detected fashion items example .................................................... 62

7
List of figures
Figure 1 Object recognition system ................................................................................ 12
Figure 2 Object recognition system – different components .......................................... 12
Figure 3 Local receptive fields ....................................................................................... 16
Figure 4 Input neurons and hidden layer ........................................................................ 16
Figure 5 Example of a convolution ................................................................................. 18
Figure 6 Example of max-pooling .................................................................................. 19
Figure 7 Fast R-CNN architecture .................................................................................. 20
Figure 8 Proposed object detection system architecture ................................................. 24
Figure 9 Example of a bounding box .............................................................................. 26
Figure 10 VOTT example ............................................................................................... 27
Figure 11 Sequence diagram of system components ...................................................... 29
Figure 12 System folder tree ........................................................................................... 30
Figure 13 Example of ROI candidates after selective search ......................................... 33
Figure 14 Before (left) and after (right) Non-maxima Suppression ............................... 37
Figure 15 Model testing time per cntk_nrRois variation ................................................ 42
Figure 16 Precision-Recall curve per class for Test200_001 ......................................... 45
Figure 17 Precision-Recall curve per class for Test200_03 ........................................... 46
Figure 18 Precision-Recall curve per class for Test200_05 ........................................... 47
Figure 19 Precision-Recall curve per class for Test2000_001 ....................................... 48
Figure 20 Precision-Recall curve per class for Test2000_03 ......................................... 49
Figure 21 Precision-Recall curve per class for Test2000_05 ......................................... 50
Figure 22 Precision-Recall curve per class for Test4000_001 ....................................... 51
Figure 23 Precision-Recall curve per class for Test4000_03 ......................................... 52
Figure 24 Precision-Recall curve per class for Test4000_05 ......................................... 53
List of tables
Table 1 Train images per category ................................................................................. 41
Table 2 Test images per category ................................................................................... 41

8
Table 3 System parameters ............................................................................................. 31
Table 4 Precision/Recall example ................................................................................... 36
Table 5 Model testing time per cntk_nrRois variation ................................................... 42
Table 6 Parameters values per test .................................................................................. 44
Table 7 Average precision for Test200_001 ................................................................... 45
Table 8 Average precision for Test200_03 ..................................................................... 46
Table 9 Average precision for Test200_05 ..................................................................... 47
Table 10 Average precision for Test2000_001 ............................................................... 48
Table 11 Average precision for Test2000_03 ................................................................. 49
Table 12 Average precision for Test2000_05 ................................................................. 50
Table 13 Average precision for Test4000_001 ............................................................... 51
Table 14 Average precision for Test4000_03 ................................................................. 52
Table 15 Average precision for Test4000_05 ................................................................. 53
Table 16 Cross Results ................................................................................................... 54

9
Chapter 1 - Introduction
This section starts with the introductory topics of the thesis and the motivation for
choosing this theme. Next, it is described the objectives and at the end the research
questions that will drive this work.
1.1 Motivation
Fingerprint recognition for security authentication or forensic applications, medical
imaging used for multiple body studies like people’s brain morphology while they age,
surveillance to detect and monitor intruders or monitoring beaches/pools for drowning
victims are today well-known real world applications of computer vision. (Szeliski, 2010)
Being that, one of the most important challenges of computer vision is object
recognition where given an image to be analyzed and applying a certain recognition
algorithm, the main goal is to detect the objects inside the image. This fact is supported
by the study of P. F. Felzenszwalb, Girshick, McAllester, & Ramanan (2009) that points
to the difficulty of detection generic objects from such different categories like cars,
persons or dogs in static images due to the variations that each object or the specific image
could have like the illumination or viewpoint.
Even given this assumption and taking in concern all challenges that are related to
object recognition, apply it to fashion, can be the bridge between people’s eyes and
systems like image based search engines. The hypothesis is that by enabling people to
photograph any given fashion item like shirts or pants, automatically detect, crop and use
it as an input to this kind of systems, customers would increase the engagement with a
fashion e-commerce company.
With that, the dissertation starts, on Chapter 2, by presenting the state of art of object
recognition and detection system by identifying some of the classical approaches on this
kind of systems and then with a presentation of Deep Learning and how it can be used for
this type of problems.
At Chapter 3 is presented the system implementation by giving a general explanation
of the architecture, the technology that was used, how it was prepared the input images
and then a detailed explanation of each component that composes the whole system.

10
Inside Chapter 5 are demonstrating the results obtained with this experiment by
introducing the dataset used and then the results itself that are divided in results based on
model training time and then of performance on detect fashion items in images.
Finally, on Chapter 6 is given the overall conclusions retrieved from this dissertation
and presented the future work that can give continuity to the experiments did in this
dissertation.
1.2 Objectives
The main goal of this thesis is to train a deep learning convolutional neural network
with a created custom dataset of images extracted from ImageNet and build an object
recognition and detection engine that given an image, of any kind, as an input, search and
retrieve the fashion items available. In order to succeed this task and to monitor the mean
average precision of the model, the test phase will use a percentage of the images from
the custom dataset and test the engine against it.
1.3 Questions of study
With this work, it is intended to answer the following questions:
• How can deep learning object recognition be applied to fashion discovery on
static images?
• Are deep learning CNNs models a good option to this kind of problems? In
addition, are robust enough to be used at the corporate level?

11
Chapter 2 - Literature review
This chapter will provide an overview of the state-of-art of object recognition. Being
that, it starts firstly with a summary of the classical object recognition approaches with a
presentation of an usual object recognition architecture and its components. During this
topic, it will be given too, some of the current object recognitions techniques that are
being used on the classical approaches.
After it is presented deep learning notion with a link to deep convolutional neural
networks (CNNs), a method of deep learning that can be used in the visual data process,
where it is presented the distinctive concepts of CNNs against regular Neural Networks
and CNNs basic structure. With these networks, it is later presented how CNNs are useful
in object recognition and detection given as an example a detailed explanation of Fast R-
CNN that has proven to be a step ahead on object detection with an improvement of
testing and training speed as well as detection accuracy.
Finally, some related work on object recognition is described. In this subtopic, it is
presented two distinct works, wherein the first the objects were detected based on CNNs
and the second one based on cascading deformable part-based models, which allowed
object recognition and detection.
2.1 Classical Object Recognition
Object recognition has its foundations on computer vision history around the years of
the 1970s where the pioneers of artificial intelligence and robotics viewed this as an
ambitious challenge that could at the end achieve another huge step to replicate the human
intelligence and behavior and endow the robots with it. (Szeliski, 2010)
It can be defined as the task of discovering a certain object in an image or even in a
video sequence. It is a fundamental vision problem since unlike humans that can detect
and identify with almost no effort a huge range of objects in images or videos that might
diverge from the viewpoint, color, size or even when the object it is partially obstructed
this task continues to be a real challenge for object recognition engines. (Latharani,
Kurian, & M, 2011)

12
2.1.1 Common object recognition system
The problematic of recognizing an object in an image is defined as a labeling problem-
based on models of known objects. Essentially, given a generic image, that contains the
objects of interest and a set of labels corresponding to a set of models available in the
system, the system may be capable to assign properly the labels to the respective regions
in the image. (Jain, Kasturi, & Schunck, 1995)
In computer vision the way it recognizes what objects are presented in a certain image
is not a linear process, there are multiple techniques, however, the generic system may be
represented as shown in Figure 1. (Riesenhuber & Poggio, 2000)
Figure 1 Object recognition system
In the previous figure, we have the basic architecture of an object recognition system.
Essentially, the learning module is trained with a set of examples, corresponding to
images previously labeled and can be described as a binary classifier. Based on an input
image it retrieves as an output “yes” or “no”, for either the respective class of the object,
like cat or dog or for the individual identity where the image belongs, for example, a face.
(Riesenhuber & Poggio, 2000)
On top of an object recognition system, a slightly more detailed architecture was
proposed, with more detailed components as shown in Figure 2. (Jain et al., 1995)
Figure 2 Object recognition system – different components

13
The Modelbase, also called Model database, contains all the known models in the
system. The information inside depends essentially on the method used for the
recognition and it goes from qualitative or functional description to precise geometric
information, being this consider features of the object, with size, color or shape some of
the common ones, allowing to describe and recognize the objects when compared to
others. This component is organized with an indexing scheme of the features to help in
the elimination of not desired object candidates from possible consideration during the
hypothesis formation stage. (Jain et al., 1995)
The feature detector component applies a set of techniques in images to identify
locations of features that help in the formation of the object hypothesis. The detected
features vary on the different types of objects to be recognized and the organization of
modelbase. With the features detected in the input image, it enters the hypothesis
formation where it is assigned probabilities to objects presented in the image base on the
recognition of certain features letting the system reducing the search space inside it. The
verification of the hypothesis will use the models of the objects presented in the
modelbase and then refine the probabilities of certain objects be in the image ending with
the system selecting the objects with the highest probability. (Jain et al., 1995)
2.1.2 Object recognition techniques
Motivated by the challenges and the relevance of object recognition subject, over the
last decade's multiple different techniques of object recognition were developed. These
techniques are in symbiosis with the systems mentioned on the previous point being
presented essentially on the learning module phase of the system.
Appearance-based
The object recognition using appearance-based techniques have been proposed to
generalize the recognition systems being currently one of the most successful approaches
to handling with 3D arbitrary objects when there is a disorder or partial obstruction of the
object. (Selinger & Nelson, 2015)

14
Appearance is the only attribute to be used for this kind of techniques and normally is
captured by different two-dimensional views of the object where it is possible to obtain
two distinct types of features, global and local.
Local features are in small regions or single points of an image describing a portion of
information about the image in that specific local. Essentially local features could be
information about the color, gradient or even gray value of a certain pixel. (Latharani et
al., 2011)
In distinction, global features have the goal to describe the entire image, all pixels in
the image are considered and it varies from a simple mean value computation to shape or
texture descriptors. (Lisin, Mattar, Blaschko, Learned-Miller, & Benfield, 2005)
Model based
This technique, that has as one of the main characteristics the division between the
preprocessing and recognition stage, reducing the complexity of the algorithm, uses the
model of an object to make some geometric transformations that map the model into a
sensor coordinate system. With these, geometric algorithms draw results from
computational geometry to detect the object. (Latharani et al., 2011)
Template-based
The template matching technique it is conceptually a simple process. Fundamentally,
it tries to find a location of an object, based on its template, on an image by the match of
the template. (Aljarrah & Ghorab, 2012)
For matching the template with the object in the input image, multiple geometrical
parameters iterations, like rotation and scale, are performed to finding the required object.
Region based
This technique starts by transforming the original image, that comes as an input, into
a directed graph, which is built based on various defined rules. The characteristics of the
graph represent the global shape information of the object in the input image and are
extracted while the graph is being constructed. (Latharani et al., 2011)

15
2.2 Deep Learning
The increase of machine-learning applications that are being used, for example, to
object recognition in images and taking in concern the limitations of conventional
machine-learning techniques in their capacity of processing natural data, in its raw format,
leads to the use of advanced techniques of representation-learning called Deep Learning
improving significantly areas of study such as speech recognition, object detection or
even visual object recognition. (Yann LeCun et al., 2015)
This subdivision of machine learning comprises methods with several levels of
representation of data that are obtained by composing modules where each one transforms
the representation at one level into multiple levels of abstraction. With this information,
it is possible to extract the set of features that characterize the combination of color,
texture, and shape of an input image. (Yann LeCun et al., 2015)
2.2.1 Convolutional Neural Networks Individual Concepts
Convolution Neural Networks (CNNs) or also called ConvNets are not a novelty
concept; in fact, studies around the late 1980s and 1990s about using neural networks to
recognize handwritten zip codes or document recognition are well-known successful case
studies of this concept being used in the early days. (Y. LeCun et al., 1989),(Yann LeCun,
Bottou, Bengio, & Haffner, 1998)
The main characteristic and advantage of CNNs over standard neural networks is that
they do not treat, from the input image, the pixels that are distance from each other in the
same way as those which are close, taking essentially into account the local spatial
structure of the image. Additionally, ConvNets architecture is well adapted to
classification problems letting a faster training and consequently the creation of deeper
networks with several layers being these days in multiple algorithms of object
recognition. (Gomez, Cortes, & Noguer, 2015)
ConvNets, as standard neural networks have multiple sequential layers in a path that
one-layer outputs are the inputs for the next one. Considering what was mentioned, many
of neural networks concepts are used on CNNs, like gradient descent or backpropagation,
however, due to the dimensionality issue, since CNNs allows to train deeper, with even

16
more layers, to avoid it, the concept of local receptive fields, pooling and shared weights
and biases were introduced. (Gomez et al., 2015)
Local Receptive Fields
When comparing CNNs with common neural networks, one of the most distinctive
characteristics of the ConvNets is the use of local receptive fields where convolutional
layers input pixels will be connected to a layer of hidden neurons. This, against traditional
neural networks, won’t connect every input pixel to every hidden neuron. In its place,
convolutional layers will only connect to a small, localized region of the input image.
(Nielsen, 2017)
The Figure 3 shows for 28x28 pixels (neurons) with 5x5 window corresponded to the
local receptive field for the hidden neuron.
Figure 3 Local receptive fields
Based on the previous image, if we slide the local receptive field across the input
image, and bear in mind that for each local receptive field there’s a hidden neuron, we
will have a hidden layer of 24x24 neurons.
Figure 4 illustrates what is being stated, with the local receptive field window on the
top-left of the corner of the input image.
Figure 4 Input neurons and hidden layer

17
Pooling
Another characteristic that distinguishes CNNs from the standard neural networks is
the existence of pooling layers that achieves to simplify the information that arrives from
the convolutional layers by reducing it. (Gomez et al., 2015)
Shared Weights and Biases
The last main difference of CNNs in comparison to standard neural networks is the
use of unique shared weights and bias (or also called filter) for each hidden neuron on
CNNs. This means that all neurons in a given convolutional layer will have the same
response to the same feature from the previous layer, that can be for example a vertical
edge. Essentially this is done due to the high probability of the learned feature to be useful
in other parts of the image. In other words, the main consequence of sharing these bias is
that the feature can be detected no matter where is in the image by getting the translation
invariance property presented on CNNs. (Gomez et al., 2015)
2.2.2 Convolutional Neural Networks Basic Structure
According to one of the pioneers CNNs architecture, LetNet-5, proposed by Yann
LeCun (1998), the CNN basic architecture must have the convolutional layer, pooling
layer, and fully connected layers.
In overall, this architecture was the basis of another and more recent CNN architectures
keeping, despite the improvements and modifications, the core concepts intact.
The Convolutional Layer
The idea of a convolution when talking of CNNs is to extract the features from an
image preserving the spatial connection from the pixels and the learned features inside
the image with the use of small equally-sized tiles.
The learned features are a consequence of a mathematical operation between each
element from the input image and the filter matrix. In other words, the filter or also known
as feature detector slides through all elements of the image and is multiplied by each one
producing the sum of multiplication outputs a single matrix named Feature Map.
As stated Filters acts like a feature detector from the image and aren’t more than a
matrix or matrices of pixels with depth - number of filters to use - and size parametrizable,

18
however depth together with the stride - number of pixels by which the filter matrix slides
the input matrix - will control the size of the Feature Map matrix. (Andrew Gibiansky,
2015)
The next Figure shows a convolution of a 5x5 image with a 3x3 filter matrix and stride
of 1.
Figure 5 Example of a convolution
Additionally, an operation called ReLU (Rectified Linear Unit) is usually used. ReLU
is an activation function that adds non-linearity into the CNNs allowing it to learn
nonlinear models. It is an operation on top of each pixel that replaces all negative pixels
inside the feature map per zero. This rectifier technique is mostly used when compared
with Hyperbolic Tangent or Sigmoid Functions since ReLU improves significantly the
performance of CNNs for object recognition. (Gomez et al., 2015)
The Pooling Layer
As mentioned previously, one of the ConvNets distinctive concepts is pooling. The
idea of the pooling step or spatial pooling is to reduce the dimensionality of each feature
map, eliminating noisy and redundant convolutions, and computation network yet
retaining most of the important information.
There are multiple pooling types, like, Max, Sum or Average, however the most
common and preferred one is max-pooling. In max-pooling it is defined a spatial
neighborhood and gets the max unit from the feature map based on that filter dimension
that can be, for example, a 2x2 window. (Andrew Gibiansky, 2015)

19
Figure 6 shows an example of max-pooling operation, with a 2x2 window and stride
of 2 taking the maximum of each region reducing the dimensionality of the Feature Map.
Figure 6 Example of max-pooling
The Fully Connected Layer
Being one of the latest layers of a ConvNet, coming right before the output layer, the
Fully Connected layer works like a regular Neural Network at the end of the convolutional
and polling layers where every neuron from the layer before the fully connected layer is
connected to every neuron on the fully connected one.
The Fully Connected Layer purposes to use the output features from the previous layer
(that can be a convolutional or a pooling layer) and classify the image based on the
training dataset. (Wan et al., 2014)
2.3 Fast R-CNN for Object Recognition and Detection
Object recognition in images is one of the most directs uses of CNNs. As mentioned,
recognize an object in an image has attached many challenges due to the variations that
each object or the specific image could have like the illumination or viewpoint.
Early methodologies used sliding window and multiscale techniques with CNNs-
extracted features and final classifiers, however, latest studies showed that training a CNN
architecture that covers recognition and detection of the objects in an integrated approach
are also a possibility with the introduction of new algorithms that learn to predict the
creation of bounding boxes. (Sermanet et al., 2013)
Supporting what was mentioned is the work of Girshick (2015) using Fast Region-
based Convolution Network (Fast R-CNN) proposing a fast and clean framework for
object detection. This work was built on top of previous works that introduced the Region-

20
based Convolution Network (R-CNN) - Girshick, Donahue, Darrell, Malik, & Berkeley
(2012) – and SPPnet – He, Zhang, Ren, & Sun (2015b) – however with multiple novelties
that improved the training and testing velocity as well as the detection accuracy of the
entire model. (Girshick, 2015)
Fast R-CNN enables an end-to-end detector combining all models into a single
network. In other words, the Fast R-CNN framework trains a CNN, a classifier and a
bounding box regressor in a unique model when previously, for example on R-CNN, we
had a different model to extract features from the input image by using a CNN, to classify
with an SVM and other for predict the bounding boxes. (Girshick, 2015)
The Fast R-CNN architecture has some particularities starting in the input
requirements taking, as usual on a ConvNet, an image and respective object annotations
but in addition a set of object proposals representing the regions of interest (RoIs) of the
images that will be used during the RoI pooling layer.
Primarily the network processes the entire image with multiple convolutional and
pooling layers producing a convolutional feature map. This first operation is one of the
gains, in terms of velocity, that Fast R-CNN achieves when compared with R-CNN since
instead of running a CNN for each region of interest, it runs a single CNN for the entire
image producing at the end the mentioned feature map. (Girshick, 2015)
Ended the first stage, the second part of the framework begins, where for each object
proposal a RoI pooling layer, using max pooling, gets a small fixed size vector from the
feature map and then mapped to a feature vector by a sequence of fully connected layers
that finally splits into two output vectors per RoI: one for the classifier (usually softmax)
to estimates the probability of each object class, and other with the bounding box
regressor that outputs the coordinates for each object class. (Girshick, 2015)
In Figure 7, we are able to see the Fast R-CNN architecture based on what was
explained before.
Figure 7 Fast R-CNN architecture

21
2.4 Related Work
In the most recent years, the use of CNNs has grown exponentially due to the multiple
successful applications on solving extremely complex computer vision problems bringing
that multiple advances in this area were being accomplished. However, some other
successful works were made without the use of CNNs.
In this topic, it is intended to describe two different studies where object recognition
and detection was applied based on two different approaches. The first one (Krizhevsky,
Sutskever, & Hinton, 2012) with the use of CNNs and applying object recognition to the
classification of generic images from ImageNet database. The second study (Jing et al.,
2015) the main goal wasn’t the application of object recognition but yes visual search,
leading to the necessity of previously using object recognition and location techniques as
a consequence, using implementation of cascading deformable part-based models for the
task.
2.4.1 Image Classification with Deep CNNs
The main goal of this article (Krizhevsky et al., 2012) was to train a large deep
convolutional neural network to classify images from ImageNet, a dataset with over 15
million labeled images that belong to approximately 22000 different categories, into 1000
different classes for the LSVRC-2010 contest.
In order to achieve the objective, it was proposed an architecture with five
convolutional layers and three fully connected ones. The output of the last fully connected
layer produces close to 1000 class labels. Essentially the architecture focus on the
delineation of responsibilities between two GPUs (Graphics processing unit) where one
runs the top layers part and the second the bottom ones giving to only certain layers from
each GPU the responsibility for the communication between the GPUs. Considering the
mentioned architecture was possible to achieve an error rate around 17 and 37 percent,
which according to the authors was the best until that date. (Krizhevsky et al., 2012)
More recent studies showed that the error rate inside this ImageNet contest is around
4.7%, goal accomplished by Microsoft research team. This achievement, based on
previous experiments, even beat human beings, which achieve the 5.1% error rate. (He,
Zhang, Ren, & Sun, 2015a)

22
2.4.2 Visual Search at Pinterest
This article (Jing et al., 2015) shows a prototype, developed by Pinterest and
University of California, which aims to build, launch and maintain a visual search engine
on top of the visual bookmarking tool, Pinterest.
As mentioned this article does not have has the main objective, object recognition,
however, it is a consequence of using visual search engines. Due to the subject of the
dissertation, this topic will only cover the object detection and localization chapter.
The architecture designed for the object detection has a two-step detection tactic that
allows giving more importance to the free text titles on Pinterest images. Another
important characteristic of the Pinterest is the possibility of pin an image, like giving a
tag. With the information of the titles and pins aggregated it is possible to obtain a good
information about the image is being analyzed. Given the textual metadata got, text-
processing algorithms are applied on top of it, which allows to firstly predict what are the
categories where the image belongs. This is a huge step in reducing computational costs
since instead of running all object detection modules, it runs the needed ones that were
predicted by the textual meta data information obtained. Another advantage of using this
tactic is according to the authors, the reduction of false-positive rate. (Jing et al., 2015)
The optimization of the object detection method was made using cascading deformable
part-based models that has as an output a bounding box for each object that was detected.
Despite that, studies are being made on top of the performance and feasibility to use deep
learning CNNs to detect the objects. (Jing et al., 2015)

23
Chapter 3 - System Implementation
This chapter starts by providing an overview of the development plan of the object
detection system where explains the main steps to build it. After it is provided an
explanation of the proposed architecture and an high-level description of all components.
Then it is given a description of all technology stack involved with a resume of the
hardware specifications where the system was developed and tested.
Subsequently it will be given an explanation of how were created the annotations for
each image, that as stated, is one of the input requirements of Fast R-CNN, along with
the input image itself and regions of interest.
Finally, it is given a detailed description of the entire components that composed the
system. In this topic will be described the function of each component, how are related to
each other and the main parameters available in the system that will affect the execution
of the components.
3.1 Development Plan Overview
Due to a number of successful studies on using deep convolutional neural networks
for object recognition and detection, being these presented as a good solution with high
accuracy and efficiency on detect objects, this dissertation follow these references and
keep the ConvNets as the approach for detecting objects in images.
As detailed on an earlier topic, Fast R-CNN became a really good solution not only
because it is an end-to-end detector with good accuracy on detect objects but also it gave
us the possibility of quickly train a new CNN enabling that new experiments could be
done during the training and testing phase. Concerning this, and keeping in mind all
requirements from Fast R-CNN, the proposed steps, in high-level view, to build the object
recognition and detection system are:
1. Manual tagging the entire dataset with the regions of interest in each image;
a. Split into training and testing data.
2. Train Fast R-CNN model;
3. Compute and evaluate the testing results.

24
3.2 System architecture
The main objective of the dissertation is by giving an image as an input to the system,
it must be capable of detecting the fashion items available. In order to achieve this, first,
we need to train a Fast R-CNN with a considerable amount of input images. These images
will be extracted from ImageNet and then treated with the input requirements of the Fast
R-CNN, already mentioned previously. After that will always occur an testing phase to
evaluate the model in order to validate if it achieves the expected outputs.
With the Training phase accomplished, the second part starts, where given an input
image to the pre-trained CNN, the output of the entire system must be the original image
with the specific bounding boxes and respective description surrounding the fashion items
inside. While live phase the idea is to interactively have a testing layer in order to test
metrics like mean average precision of the entire system.
Figure 8 Proposed object detection system architecture illustrates the proposed system
architecture with the respective distinctive components.
Figure 8 Proposed object detection system architecture
25
3.3 Technology Stack
First, it is important to mention that while the period of building this system, the tests
and developments were made on a personal laptop, and not in a professional infrastructure
with large RAM capacity or multiple GPUs to train the network. This means that we are
always limited to the available hardware, which affects the evaluation and training
delivery times. Despite that, no big blockers we have experienced in these phases being
this one of the main reasons for choosing Fast R-CNN, namely, velocity on training the
network.
Before any logic technology stack, it is important to know where everything runs, the
hardware components, since as explained, it has a certain impact while developing and
testing. Concerning this, the system hardware is composed by the following main
components:
• Processor: Intel(R) Core(TM) i7-6700HQ 2.60GHz;
• Graphic card: NVIDIA GeForce GTX 1060 6GB GDDR5;
• RAM: 16GB DDR4.
Focus now on logic technology stack, there are three main technologies to reinforce
and were used to build the entire system:
• Python1 was the programming language choose for orchestrating the whole
system logic;
• CNTK2 is an integrated deep-learning toolkit developed by Microsoft that
supports Fast R-CNN;
• OpenCV3 it is an open source computer vision library that was used in this
project essentially for image manipulation.
1 https://www.python.org/ 2 https://docs.microsoft.com/en-us/cognitive-toolkit/ and https://docs.microsoft.com/en-us/cognitive-
toolkit/Object-Detection-using-Fast-R-CNN 3 http://opencv.org/
26
Other Python libraries, were used to support operations like array manipulation, with
NumPy4, or image processing, using PIL5, despite that multiple of these libraries are
available on Anaconda6, a data science package manager available for python.
3.4 Image annotation
One of the biggest time-consuming tasks while training Fast R-CNN with a custom
dataset, namely when we have thousands of images, is the annotation process since it is
something that needs to be manually handled before the training phase.
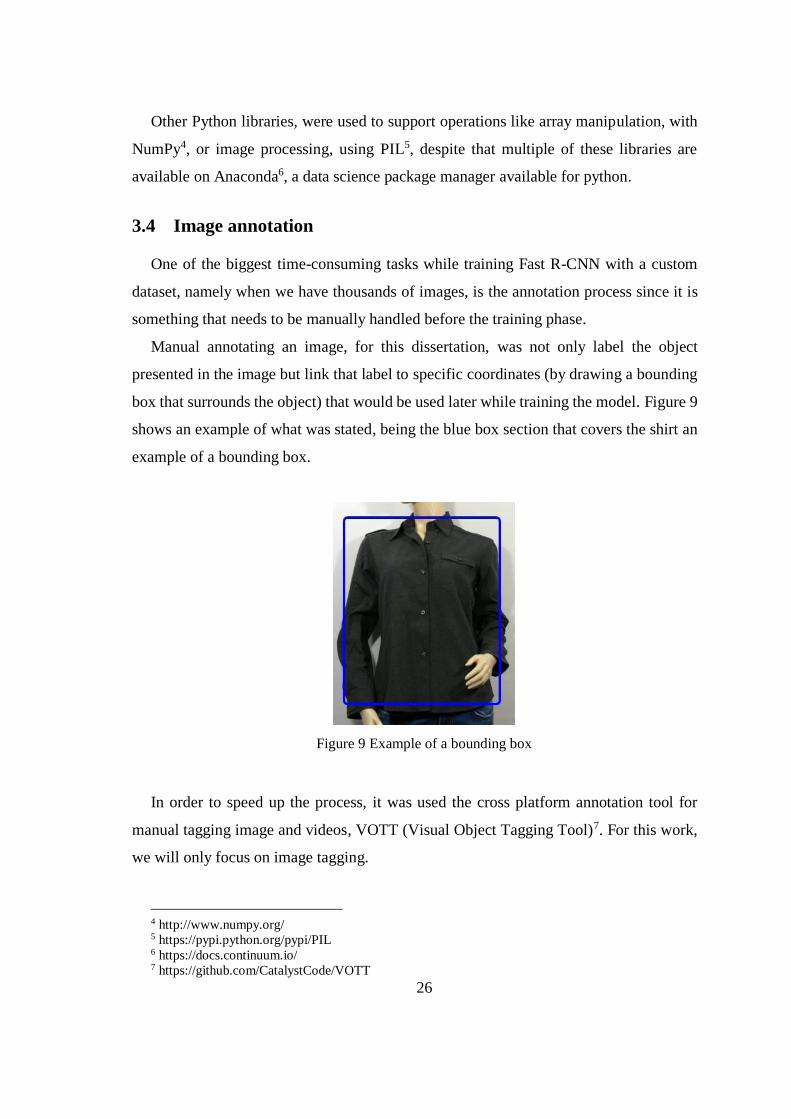
Manual annotating an image, for this dissertation, was not only label the object
presented in the image but link that label to specific coordinates (by drawing a bounding
box that surrounds the object) that would be used later while training the model. Figure 9
shows an example of what was stated, being the blue box section that covers the shirt an
example of a bounding box.
Figure 9 Example of a bounding box
In order to speed up the process, it was used the cross platform annotation tool for
manual tagging image and videos, VOTT (Visual Object Tagging Tool)7. For this work,
we will only focus on image tagging.
4 http://www.numpy.org/ 5 https://pypi.python.org/pypi/PIL 6 https://docs.continuum.io/ 7 https://github.com/CatalystCode/VOTT
27
The process of image manual tagging using VOTT, despite slow due to the big dataset,
it is pretty straightforward, requiring just a few steps, namely:
1. After selecting to tag an image directory option, we need to load the image
dataset folder;
2. With the dataset properly loaded, then it is required to configure the bounding
box type (rectangle or square) and the respective labels/classes of the objects
(shirts, pants, and glasses);
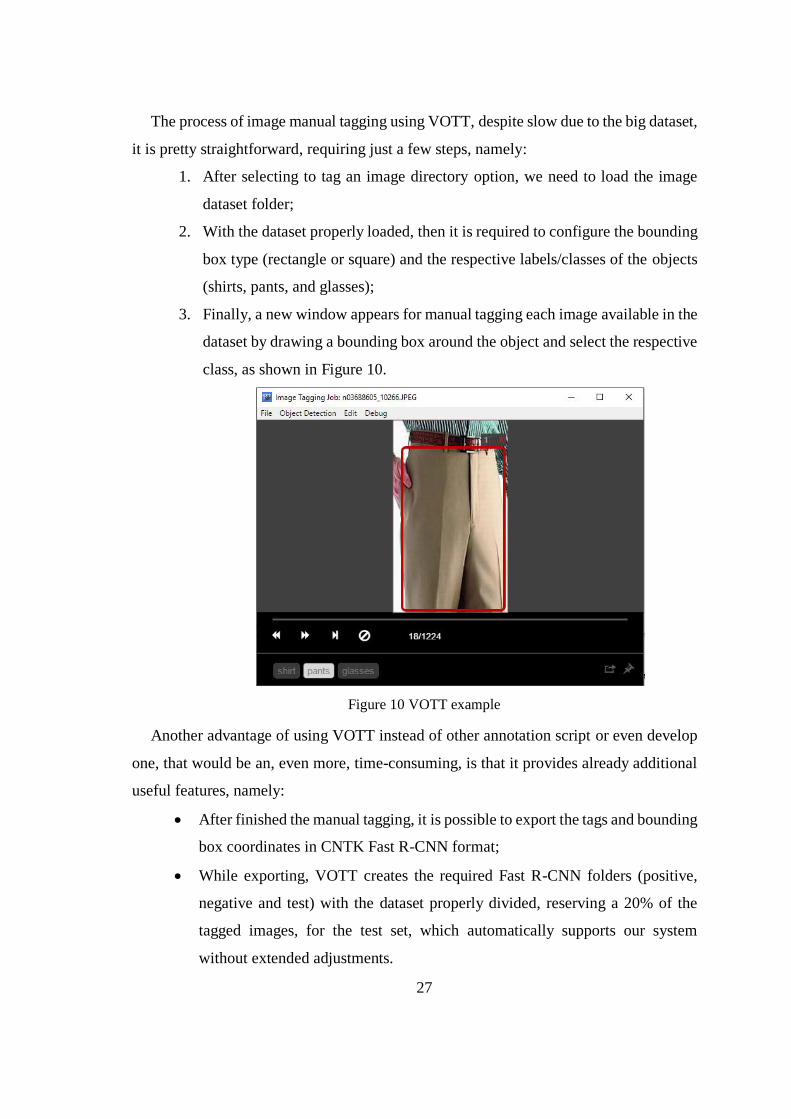
3. Finally, a new window appears for manual tagging each image available in the
dataset by drawing a bounding box around the object and select the respective
class, as shown in Figure 10.
Figure 10 VOTT example
Another advantage of using VOTT instead of other annotation script or even develop
one, that would be an, even more, time-consuming, is that it provides already additional
useful features, namely:
• After finished the manual tagging, it is possible to export the tags and bounding
box coordinates in CNTK Fast R-CNN format;
• While exporting, VOTT creates the required Fast R-CNN folders (positive,
negative and test) with the dataset properly divided, reserving a 20% of the
tagged images, for the test set, which automatically supports our system
without extended adjustments.

28
3.5 System components
The system components were developed with the support of Microsoft Cognitive
Toolkit, or also known as CNTK, pre-compiled binaries. Concerning this, it became
important to know a few better CNTK and its possibilities.
Developed by Microsoft Research team, CNTK is a unified deep-learning framework
that establishes a good alternative to other deep-learning frameworks like Theano or
TensorFlow allowing, amongst the others, structured implementation of the most popular
deep neural networks architectures like CNNs, RNNs and recently Fast R-CNN.
According to multiple studies on top of CNTK, proved that it became one of the best
deep-learning frameworks surpassing other frameworks in terms of speed, Shi, Wang,
Xu, & Chu, (2016) or even accuracy Xiong et al., (2016).
Concerning this, and since CNTK is completely compatible with Python and Windows
operating system, supporting yet Fast R-CNN implementation abstracting the user of the
effort of building it manually, this framework became the understandable choice for
developing the system.
Finally, it is important to mention that some of the source code system components
available were built partially based on CNTK Fast R-CNN tutorial provided by
Microsoft8 allowing to reduce the implementation time.
Each component has its own particular importance during the training and evaluation
phase, however as it was implemented, there’s no direct communication between them
which means that when a certain component execution ends, it produces one or more
physical files (like input ROIs coordinated file or trained model) that will be required in
the next component, however the next component must be manually launched by the user.
The reason why it was developed like this was because each component is isolated from
the others and most of the time it is executed without the need of executing the others
(e.g. change the number of ROIs to extract from an image, only the first file,
GenerateInputFile.py, needs to execute) avoiding redundant and time consuming steps.
8 https://docs.microsoft.com/en-us/cognitive-toolkit/Object-Detection-using-Fast-R-CNN

29
Figure 11 shows a sequence diagram of the system components presented during the
evaluation and training phase. In the next points, will be discussed each component in
detail.
Figure 11 Sequence diagram of system components
3.5.1 System folder tree
Due to the requirement of organizing the project system folder, it was created a folder
structure, based on CNTK files organization, in order to store the dataset, output files and
python scripts, organized in the respective folders. Concerning this, in Figure 12 is
presented the folder tree of the developed system.

30
Figure 12 System folder tree
fastRCNN is the root folder, inside, amongst the other folders are presented the python
files, namely, Parameters.py, GenerateInputROIs.py, RunModel.py and
EvaluateOutput.py.
Inside DataSets folder are the input images for training and testing the model with the
respective annotation files. These images are separated in three folders, depending on
what will be used.
The proc folder is from where the final ROIs for each image will be written. The rois
subdirectory as the previous point is also divided depending on if the ROIs belong to a

31
positive, negative or test image. The cntkFiles subdirectory contains the input files for
images, the ROI coordinates and ROI labels – all in CNTK format9.
Finally, the output folder is where the trained model will be stored.
3.5.2 Parameters
During the implementation, some configurable parameters were used that helped built
and optimize the system. With the parameters section available on Parameters.py file it
was possible to have a single place of configurations without the need of further
configurations on the other components.
Table 1 System parameters show a resume of the main parameters available.
Parameter Description
datasetName Dataset name to be used
cntk_nrRois Number of ROIs per image
cntk_padWidth Input image width in pixels
cntk_padHeight Input image height in pixels
Classifier Options: 'svm', 'nn'. Select which
classifier to use.
roi_maxImgDim Image size used for ROI generation
nmsThreshold Non-Maxima suppression threshold (in
range [0,1]).
Table 1 System parameters
The datasetName parameter is where it is configured which data should be used. This
is important essentially because if there is a need of having multiple configured datasets,
we just need to change a single parameter to be reflected in the system.
The cntk_nrRois is a parameter that tells the system how many ROIs should be used
for training and testing. This parameter is particularly important due to the impact that
will have on system execution times since the lower the value, the quicker the system will
be, however without expectation of good results.
9 https://docs.microsoft.com/en-us/cognitive-toolkit/Object-Detection-using-Fast-R-CNN#cntk-input-
file-format

32
The cntk_padWidth and cntk_padHeight parameters reflect the deep neural network
input image size. These parameters are required because the Fast R-CNN model required
that all images be with the same size converting each image for the specified size.
The Classifier parameter tells the system which classifier should be used.
Consequently of the current Fast R-CNN implementation available on CNTK, currently
it is only possible to use Support Vector Machine (‘svm’ option) or softmax (‘nn’ option)
The roi_maxImgDim parameter tells the max image size used for ROI generation. The
bigger the parameters, objects with higher dimensions are easily detected, however, this
parameter should be carefully configured because we can’t increase it significantly with
the consequence of affecting the detection of small objects.
The nmsThreshold tells the system the non-maxima suppression threshold that affects
the combination of ROIs - the lower the value more ROIs will be combined.
3.5.3 Generate Input ROIs component
Regions of interest (ROI) can be defined as a set of samples within a dataset that is
identified for a specific purpose. A common example is applied to images, being an ROI
a portion of an image that it is intended to filter to perform operations on top of it.
(Brinkmann, 2008)
The Generate Input ROIs component (GenerateInputROIs.py) logic is divided into
three stages that will at the end generate ROIs candidates for each image. These ROIs are
then converted into CNTK format and stored in rois and cntkFiles subdirectories,
described already on System folder tree section, to be then executed in Fast R-CNN
model.
The script starts by generating for each input image ROI candidates. This task is done
recurring to selective search technique that produces, per image, a huge number of ROIs.
Selective search is a method for discovering a considerable set of probable object
locations in an image, disregarding the actual object class. It works by grouping the image
pixels into segments, performing then hierarchical clustering to gather segments from the
same object into regions of interest. (Uijlings, Van De Sande, Gevers, & Smeulders,
2012)

33
The main goal of ROIs generation is to find a minor group of ROIs that however cover
tightly, as many as possible, the distinct objects presented in the image. The second stage
came to help in that process since despite selective search works well on producing those
ROI candidates, it produces also, multiple bigger, smaller and identical ROIs. With that,
the task of the second stage is to discard those ROIs that will not be useful during the
training and testing phase. Lastly, the third stage adds supplementary ROIs at different
aspect ratio and scales that cover the image integrally.
Figure 13 shows an example of an image with respective ROI candidates after selective
search, being the green and red rectangles the ROIs that were considered after second
stage and the blue rectangles the ones that were excluded.
Figure 13 Example of ROI candidates after selective search

34
3.5.4 Train Fast R-CNN model component
This component will train a new Fast R-CNN model and generate the model output
file and additional required files that will be used for future evaluations. As stated, CNTK
provides an implementation which reduced the system implementation time. With this in
mind, in order to train the model it is only required to properly configure the system
configuration file (Parameters.py) with a special attention to classifier parameter that will
affect the model execution and on predicting the ROI labels and scores or also named
detection confidence.
An important subject related to the Fast R-CNN model training rests on the base model
that is being used. Currently, for CNTK, the only available base model is AlexNet with
some adaptions in order to follow the Fast R-CNN architecture.
AlexNet is a deep convolutional neural network developed by Krizhevsky et al., (2012)
submitted to the ILSVRC challenge in 2012, winning the contest. Its basic architecture is
similar to LetNet but bigger and deeper, having as a main difference than the previous
architectures at the time, the use of multiple convolutional layers loaded on top of each
other instead of a single convolutional layer followed by pooling layer.
CNTK Fast R-CNN implementation has as its basis on AlexNet deep neural network,
however, in order to make it plausible for a Fast R-CNN architecture, an ROI pooling
layer was introduced between the last convolutional layer and the first fully connected
layer of the AlexNet base architecture.
One of the main differences between CNTK Fast R-CNN implementation and the
original experiment by Girshick (2015) is the model architecture since, in CNTK
implementation, there’s no bounding box regression layer, instead this model works by
classifying proposal regions of each image, as belonging to one of a set of existent object
classes, or as ‘background’ class. All images are treated by a sequence of convolutional
layers and then, for each proposal region, convolutional features with spatial support
conforming to that region are extracted and resized to a fixed dimension, before being
passed through three fully-connected layers, the last of which yields a score for each
object class and ‘background’. The class scores for each region are then loaded into a
softmax classifier function, to produce a distribution over classes. (Henderson & Ferrari,
2017)

35
At the end of the training, it starts the first part of the evaluation stage, where for each
image, the predicted ROIs and labels are stored in FastRCNN/proc/Fashion/cntkFiles
subdirectory to be further used while evaluating the results, on the EvaluateResults
component.
3.5.5 Evaluate Results component
Once ended the training stage and the predicted ROIs and labels properly stored in the
respective subdirectory, the Evaluate Results component can be used. Essentially this
component intends to parse the output files provided and compute the classifier accuracy
by returning the model mean Average Precision for the testing set.
The model quality can be measured by using multiple different criteria’s such as recall,
accuracy, precision, amongst the others, however, a usual metric is, for each object class,
measure the system average precision, being the mean Average Precision (mAP) the
average of average precision of all classes.
The idea of computing Average Precision is due to its value for evaluating a certain
model in terms of classification and detection capacity. This metric combines recall and
precision metrics, by computing for each class the precision/recall curve, being very
sensitive to the ranking of retrieval results, since the lower ranking results have less
impact than the results in the higher rank.
With this in mind, the computation of Average Precision can be described as a sum of
precisions at every possible threshold value multiplied by the change in the recall:
∑ 𝑃(𝑘) ∆𝑟(𝑘)
𝑁
𝑘=1
Where,
• N is the images total number;
• 𝑃(𝑘) the precision at cutoff time of k images
• ∆𝑟(𝑘) the change in recall between the cutoff k and cutoff k-1.

36
In resume, if we had the following hypothetical results, shown in Table 2, in that exact
order:
Retrieval cutoff Precision Recall ∆𝑟(𝑘)
Top 1 image 100% 20% 0.2
Top 2 images 100% 40% 0.2
Top 3 images 66% 40% 0
Top 4 images 75% 60% 0.2
Top 5 images 60% 60% 0
Top 6 images 66% 80% 0.2
Top 7 images 57% 80% 0
Top 8 images 50% 80% 0
Top 9 images 44% 80% 0
Top 10 images 50% 100% 0.2
Table 2 Precision/Recall example
The average precision metric would be:
𝐴𝑃 = (1 ∗ 0.2) + (1 ∗ 0.2) + (0.66 ∗ 0) + (0.75 ∗ 0.2) + (0.6 ∗ 0) + (0.66 ∗ 0.2)
+ (0.57 ∗ 0) + (0.5 ∗ 0) + (0.44 ∗ 0) + (0.5 ∗ 0.2) = 0.782
Finally, the results can be visualized, showing only the ROIs and respective classes
that have a detection confidence above 0.5. In order to visualize the final results, it is
applied Non-Maxima Suppression (NMS) technique that tries to identify which ROI best
cover the object by selecting the one with the highest confidence, removing the other
ROIs for the same class that overlaps the “best” ROI.
Figure 14 shows an example of a before and an after Non-maxima suppression
application being possible to distinguish multiple predicted ROIs, with its detection
confidence, that were deleted after running NMS leaving only one ROI for shirt class that
represents the best-located ROI for the object.

37
Figure 14 Before (left) and after (right) Non-maxima Suppression

38

39
Chapter 4 - Results Evaluation
In order to evaluate the system and its capabilities, it is important to measure it in two
different perspectives namely, the duration that takes on training the model and the system
performance on detecting and classifying an image set.
Concerning this, two different parameters will be varied while training/testing in order
to measure its impact in the system. The first parameter is cntk_nrRois that theoretically
affects system times and performance so it is expected to be one of the most critical
parameters. The second is related to nmsThreshold that only affects the testing stage so
only the system performance on detecting and classifying an image, however, due to its
purpose already stated on Parameters section it is expected to have a few impact which
becomes an interesting parameter to test.
The classifier that will be used for training and testing stages will be softmax.
Currently, CNTK only supports softmax and SVM, however, these experiments will
follow the Fast R-CNN paper, Girshick (2015), that used softmax and proved that for the
Fast R-CNN algorithm, it worked better than SVM classifier.
All experiments will be on top of ImageNet custom dataset, already described on
system implementation section. With that, the first point, based on the training set
available, will test the impact of cntk_nrRois on model execution times, by measuring the
time it takes to train a Fast R-CNN model by varying that parameter.
After, as specified, will be presented the results evaluation of the system in terms of
its capability of detecting and classifying the images available in the testing set, being
these results presented by using a precision/recall curve plot and average precision metric,
per class. With that, variations of cntk_nrRois and nmsThreshold values will be performed
to measure the impact on the mentioned metrics.
Finally, a cross results evaluation will be performed, aggregated to cntk_nrRois
variations, to assess the real impact of change this parameter in terms of system
performance.

40
4.1 Train and test data
For the respective object recognition and detection system, it was created a custom
dataset with images extracted from ImageNet. In order to accomplish the dissertation
objectives and due to a number of fashion items available from multiple distinct
categories, it was chosen to select three diverse categories to detect: one for each body
part, lower and upper body, and another related to fashion accessories.
For the lower body, it was selected generic pants. The idea is to detect pants, no matter
the type (jeans, straight pants, etc). This thought is shared with the category fashion
accessories where it is intended to detect glasses, no matter if are eyeglasses or sunglasses.
For the upper body, there’s a distinction when compared with the other two categories,
the idea is to detect specifically shirts. This means that we intend to detect shirts but not
relatives, like sweatshirt or t-shirts.
Another custom set of data was extracted from ImageNet that concerns to negative
images to be used during the network training, being the only dataset that doesn’t belong
and doesn’t have the categories to be detected. This last dataset has multiple different
categories going from, animals, flowers, cars, appliances and other random images.
Finally, the dataset was divided into 80% for the training set and 20% for the test set.
This is supported by the need of having low variance while testing data and still have the
amount of data required to have low variance in the training set too.
Table 3 shows the number of images available in the training dataset per its different
categories and type.
Type Category # of Images
Positive Pants 981
Positive Shirts 1144
Positive Glasses 1040
Negative Appliances 153
Negative Other Fashion items 93
Negative Cars 75

41
Negative Animals 64
Negative Flowers 43
Negative Others 84
Total 3677
Table 3 Train images per category
As it possible to see through the Table 1 analysis, the training data will have a total of
3677 distinct images belonging to around 86% (3165 images) to a positive set of images
and 14% (512 images) to the negative set. Focus on positive training set, it was intended
to have similar number of images between categories, being however, the shirts category
the one with higher number, 1144 images (~31%), followed by glasses category with
1040 images (~28%) and last pants category with 981 images (~26%).
Focus now on the test dataset, Table 4 resumes the spare of images amongst the
different categories. Note that, inside test dataset there is no negative images since this
type of images are only to be used during the training period.
Category # of Images
Pants 208
Shirts 268
Glasses 220
Total 696
Table 4 Test images per category
In the test set, as it occurs on the training set for the positive categories, it is intended
to have a similar number of images across categories. Concerning this and for a total of
696 images, we have around 30% (208 images) of pants, 39% of shirts (268 images) and
31% of glasses (220 images).

42
4.2 Model Training Time Analysis
One of the most interesting evaluations on top of object detection systems is the time
it takes while training the model. This state is supported by the multiple analysis made on
an diversified number of papers around this kind of systems, namely as an example He et
al., (2015b) or Girshick et al., (2012), that had as a main goal the assessment of the
improvement or lost in terms of speed that their solutions had, while compared to other
algorithms or by varying parameters.
For this test, the focus will be on testing the model training duration by varying one
specific parameter, namely cntk_nrRois, and evaluate its impact on training time. With
this, Table 5 shows a resume of the obtainable results for three distinct cntk_nrRois
possible values.
Test name cntk_nrRois Duration (in minutes)
Test200 200 31.55
Test2000 2000 187.9
Test4000 4000 358
Table 5 Model testing time per cntk_nrRois variation
In order to help the analysis, Figure 15 provides graphically the stated results.
Figure 15 Model testing time per cntk_nrRois variation
0
50
100
150
200
250
300
350
400
Test200 Test2000 Test4000

43
As it can be observed, the cntk_nrRois parameter has a huge impact in model training
times increasing significantly the delivery of a trained model. In other words, if a given
trained model that has cntk_nrRois value configured to 200 requires to be re-trained with
10x more number of ROIs, so 2000, to be extracted during selective search, this will have
an increase of around 496% (156 minutes) in the whole system training time or close to
1035% (~326 minutes) if instead we choose to grow the value 20x more, 4000 ROIs. This
state is also visible if we want to increase the number of ROIs from 2000 to 4000 since
the model will take around 90% more time (~170 minutes) to execute.
The increase of time from a theoretical perspective is plausible since more ROIs are
extracted on selective search more ROIs will be pooled into each feature map and
consequently more time for classification and prediction steps. Despite that, it became
even more important and interesting to analyze the impact of cntk_nrRois variation on
system performance on detecting and classifying the objects.
4.3 Recognition and Detection Results Analysis
The performance of an object recognition and detection system engine on classifying
and locate objects in images is possibly the most important analysis that it is likely to do
on top of this kind of systems since it will give an overall notion on if it is doing what it
intends to do or not.
Some metrics can be used to measure these systems like precision, recall, area under
curve, and others. With this, the idea to accomplish these tests is to combine these metrics
through a precision/recall curve and area under curve, also known as average precision,
and analyze the obtained results.
Another important topic is due to the parameters that will be varied while testing. As
stated these parameters are cntk_nrRois and nmsThreshold and the values will be varied
in order to measure the impact in performance. The first parameter cntk_nrRois value will
be a consequence of the trained models that were done for training time analysis, so
currently we have three different Fast R-CNN models where one was trained with
cntk_nrRois = 200 another 2000 and the last 4000.

44
Regarding nmsThreshold, the tests will be made by varying it in a set of values of
[0.01; 0.3; 0.5]. The idea is for each trained module we vary the non-maxima suppression
threshold parameter and evaluate its impact.
Table 6 Parameters values per test resume the values of all parameters in each test that
will be performed.
Test name cntk_nrRois nmsThreshold
Test200_001 200 0.01
Test200_03 200 0.3
Test200_05 200 0.5
Test2000_001 2000 0.01
Test2000_03 2000 0.3
Test2000_05 2000 0.5
Test4000_001 4000 0.01
Test4000_03 4000 0.3
Test4000_05 4000 0.5
Table 6 Parameters values per test

45
4.3.1 Test200_001
The obtained results for Test200_001 with cntk_nrRois = 200 and nmsThreshold =
0.01 can be observed in Figure 16 Precision-Recall curve per class for Test200_001 with
a Precision-Recall curve per class being then resumed in Table 7 by showing the average
precision for each class and mean average precision, in percentage, for the respective test.
Figure 16 Precision-Recall curve per class for Test200_001
shirt pants glasses mAP
0.7699 0.6349 0.4185 0.6078
Table 7 Average precision for Test200_001
Analyzing the Precision-Recall curve it is possible to conclude that for low recall
values, pants is the class where our model achieves better precision, however after ~50%
recall it has a significant decrease in precision which turns shirt as the class with overall
best precision, having yet a significant precision decrease close to 80% recall. This fact
is supported by the average precision computation that shows shirts as the class with
better AP, close to 77%, superior to pants with AP of ~63% and glasses, achieving an AP
of ~61%. With this, overall the model with these configurations achieved a mean average
precision (mAP) of ~61%.
46
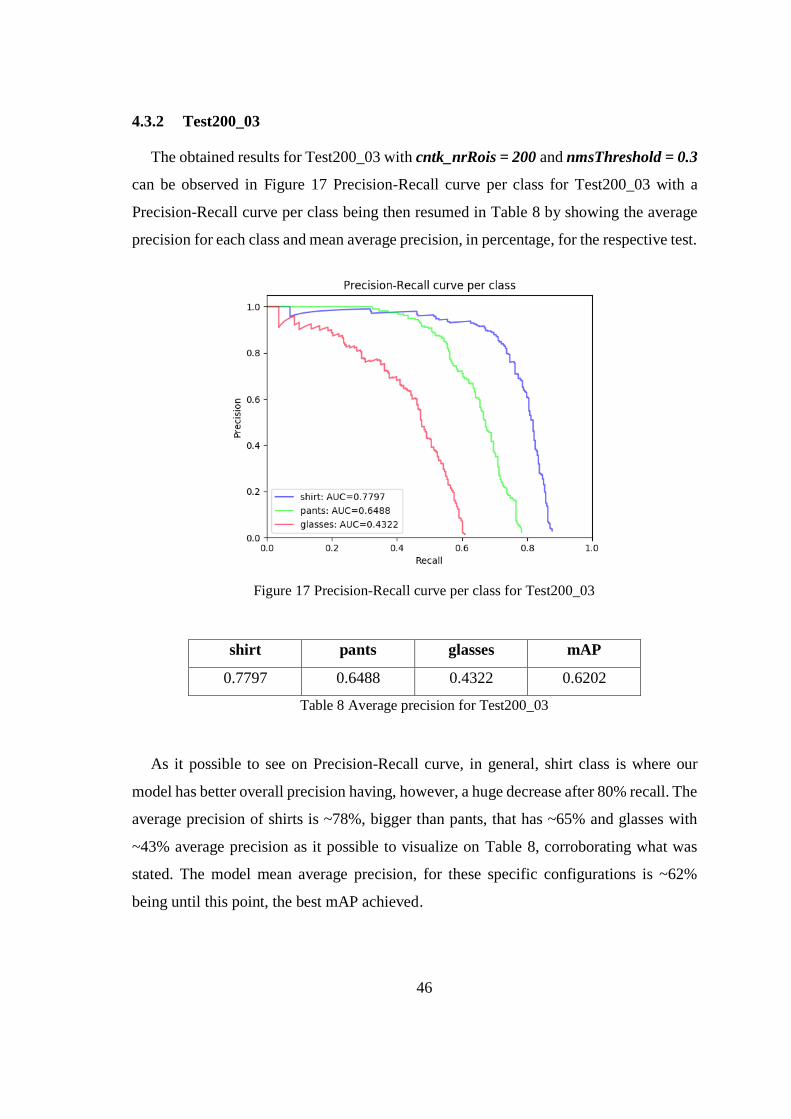
4.3.2 Test200_03
The obtained results for Test200_03 with cntk_nrRois = 200 and nmsThreshold = 0.3
can be observed in Figure 17 Precision-Recall curve per class for Test200_03 with a
Precision-Recall curve per class being then resumed in Table 8 by showing the average
precision for each class and mean average precision, in percentage, for the respective test.
Figure 17 Precision-Recall curve per class for Test200_03
shirt pants glasses mAP
0.7797 0.6488 0.4322 0.6202
Table 8 Average precision for Test200_03
As it possible to see on Precision-Recall curve, in general, shirt class is where our
model has better overall precision having, however, a huge decrease after 80% recall. The
average precision of shirts is ~78%, bigger than pants, that has ~65% and glasses with
~43% average precision as it possible to visualize on Table 8, corroborating what was
stated. The model mean average precision, for these specific configurations is ~62%
being until this point, the best mAP achieved.

47
4.3.3 Test200_05
The obtained results for Test200_05 with cntk_nrRois = 200 and nmsThreshold = 0.5
can be observed in Figure 18 Precision-Recall curve per class for Test200_05 with a
Precision-Recall curve per class being then resumed in Table 9 by showing the average
precision for each class and mean average precision, in percentage, for the respective test.
Figure 18 Precision-Recall curve per class for Test200_05
shirt pants glasses mAP
0.7379 0.6082 0.4055 0.5839
Table 9 Average precision for Test200_05
By visualizing the Precision-Recall curve we can conclude that shirt class is, when
compared with the previous points, once again, the class with overall best precision with
around 74%. Despite that these configurations, for cntk_nrRois = 200 proved to be, until
now, the poorest since all average precisions decreased and consequently the mAP, being
~58% inferior than the previous with ~61% for Test200_001 and ~62% for Test200_03.

48
4.3.4 Test2000_001
The obtained results for Test2000_001 with cntk_nrRois = 2000 and nmsThreshold
= 0.01 can be observed in Figure 19 Precision-Recall curve per class for Test2000_001
with a Precision-Recall curve per class being then resumed in Table 10 by showing the
average precision for each class and mean average precision, in percentage, for the
respective test.
Figure 19 Precision-Recall curve per class for Test2000_001
shirt pants glasses mAP
0.7700 0.6061 0.5427 0.6396
Table 10 Average precision for Test2000_001
Looking for Figure 19 that shows the Precision-Recall curve per class for these specific
configurations it is possible to observe that our model continues to have a better precision
on shirt class, being this confirmed by the computation of average precision, resumed on
Table 10, higher than pants with ~61% average precision and ~54% average precision for
glasses. It became interesting to highlight the growth of average precision of glasses class
when compared with the previous tests, increasing more than 11% affecting positively
the mAP measure achieving the best result until now with ~64%.

49
4.3.5 Test2000_03
The obtained results for Test2000_03 with cntk_nrRois = 2000 and nmsThreshold =
0.3 can be observed in Figure 20 Precision-Recall curve per class for Test2000_03 with
a Precision-Recall curve per class being then resumed in Table 11 by showing the average
precision for each class and mean average precision, in percentage, for the respective test.
Figure 20 Precision-Recall curve per class for Test2000_03
shirt pants glasses mAP
0.7738 0.6274 0.5579 0.6530
Table 11 Average precision for Test2000_03
Observing the Precision-Recall curve of Figure 20 it is possible to visualize that pants
and glasses tend to have similar precisions for levels of recall between 65 and 75 percent.
Despite that, these similar results happen only when the precision value is decreasing,
however for the low level of recalls this state isn’t valid affecting the difference of values
of model average precision for both classes being pants higher with ~63% than glasses
with ~56%. Shirt class continues to be where our model achieves the best average
precision with ~77% being the mAP as ~65%, the best mean average precision achieved
until now.

50
4.3.6 Test2000_05
The obtained results for Test2000_05 with cntk_nrRois = 2000 and nmsThreshold =
0.5 can be observed in Figure 21 Precision-Recall curve per class for Test2000_05 with
a Precision-Recall curve per class being then resumed in Table 12 by showing the average
precision for each class and mean average precision, in percentage, for the respective test.
Figure 21 Precision-Recall curve per class for Test2000_05
shirt pants glasses mAP
0.7403 0.6034 0.4979 0.6138
Table 12 Average precision for Test2000_05
By analyzing the Precision-Recall curve it is possible to interpret that for low recall
values, pants is the class where our model achieves better precision, however after ~40%
recall it has a significant decrease in precision which turns shirt as the continuous class,
across tests with overall best precision, having yet a significant precision decrease after
~50% recall. This fact is also supported by the average precision computation that shows
shirts as the class with better AP, close to 74%, superior to glasses with AP of ~50% and
pants, achieving an AP of ~60%. Concerning this, overall the Test2000_05 achieved a
mean average precision (mAP) of ~61%.

51
4.3.7 Test4000_001
The obtained results for Test4000_001 with cntk_nrRois = 4000 and nmsThreshold
= 0.01 can be observed in Figure 22 Precision-Recall curve per class for Test4000_001
with a Precision-Recall curve per class being then resumed in Table 13 by showing the
average precision for each class and mean average precision, in percentage, for the
respective test.
Figure 22 Precision-Recall curve per class for Test4000_001
shirt pants glasses mAP
0.7556 0.5759 0.5596 0.6304
Table 13 Average precision for Test4000_001
Watching Figure 22 it is possible to observe that shirt class, which continues to be the
class where our model has the best average precision, achieved also a good overall
precision until ~80% recall, having then a significant value decrease finishing at the end
with an average precision of ~76%. For this test, it was achieved a mAP of ~63%, where
pants had AP of ~58% and glasses ~56%.

52
4.3.8 Test4000_03
The obtained results for Test4000_03 with cntk_nrRois = 4000 and nmsThreshold =
0.3 can be observed in Figure 23 Precision-Recall curve per class for Test4000_03 with
a Precision-Recall curve per class being then resumed in Table 14 by showing the average
precision for each class and mean average precision, in percentage, for the respective test.
Figure 23 Precision-Recall curve per class for Test4000_03
shirt pants glasses mAP
0.7617 0.5941 0.5705 0.6421
Table 14 Average precision for Test4000_03
By visualizing the Precision-Recall curve from Figure 23 we can conclude that shirt
class is, once again, the class with overall best precision with around 76%. Despite that
for these configurations, glasses class achieved an average precision of ~57% being the
best AP for this class, until now. The mean average precision didn’t diverge too much
from the previous results with a ~64%.

53
4.3.9 Test4000_05
The obtained results for Test4000_05 with cntk_nrRois = 4000 and nmsThreshold =
0.5 can be observed in Figure 24 Precision-Recall curve per class for Test4000_05 with
a Precision-Recall curve per class being then resumed in Table 15 by showing the average
precision for each class and mean average precision, in percentage, for the respective test.
Figure 24 Precision-Recall curve per class for Test4000_05
shirt pants glasses mAP
0.7347 0.5675 0.5160 0.6061
Table 15 Average precision for Test4000_05
The last test doesn’t bring much novelty being the shirt class the one that our model
achieves the best precision, as usual, being proceeded by pants with an ~57% average
precision and glasses with ~52%. With this, overall the mean average precision is ~61%
for these parameters.

54
4.4 System Cross Results Analysis
To complete the model analysis it was conducted a cross results analysis where it’s
related the time spent results on training the model by modifying the cntk_nrRois
parameter and its real impact, as well with the variation of nmsThreshold, on model
average precision per class and respective mean average precision metric. Concerning
this, Table 16 shows a summary of all obtained results while testing the different
parameters highlighting the overall best results from all tests.
Test name
time
performance
Duration
(in
minutes)
Test name
performance
classification
Shirt Pants Glasses mAP
Test200 31.55
Test200_001 0.7699 0.6349 0.4185 0.6078
Test200_03 0.7797 0.6488 0.4322 0.6202
Test200_05 0.7379 0.6082 0.4055 0.5839
Test2000 187.9
Test2000_001 0.7700 0.6061 0.5427 0.6396
Test2000_03 0.7738 0.6274 0.5579 0.6530
Test2000_05 0.7403 0.6034 0.4979 0.6138
Test4000 358
Test4000_001 0.7556 0.5759 0.5596 0.6304
Test4000_03 0.7617 0.5941 0.5705 0.6421
Test4000_05 0.7347 0.5675 0.5160 0.6061
Table 16 Cross Results
Observing the Table 16 in detail, several interesting conclusions can be extracted from
a performance viewpoint. First the best average precision achieved for shirt and pants was
on the same test, namely Test200_03 (cntk_nrRois = 200; nmsThreshold = 0.3) with an
average precisions of ~78% and ~65%, respectively. This analysis is interesting and a
sort of curious since, less regions of interest were extracted from the images, however, it
affected positively on both classes average precision and subsequently on the model
duration time, being the Test200 the best one, taking close to 32 minutes to train the entire
model.

55
Another interesting observation is that instead of shirt and pants, the best average
precision accomplished for glasses was in Test4000_03 (cntk_nrRois = 4000;
nmsThreshold = 0.3) with ~57% which means that in glasses class, having extracted
more ROIs was helpful on improving model average precision for that class.
Regarding the mean average precision metric, it is interesting to note that the best test
was Test2000_03 (cntk_nrRois = 2000; nmsThreshold = 0.3) with a mAP of ~65%, this
result becomes even more interesting when analyzing the table and seeing that the test
with the best mean average precision, doesn’t have any of its class with the best average
precision when compared with the other tests. Actually none of the best average precision
metrics belong to the universe of 2000 ROIs extracted, however the only pattern that it’s
possible to visualize is that all best results were with non-maxima suppression threshold
equals to 0.3.
Finally and due to the spreading of best results amongst the different tests, we can
conclude that there is no optimal parameter configuration for training Fast R-CNN model
to be capable of detect all objects with the best AP possible which means that to detect a
specific object/class, we need to find the best parameters configuration that fits for
classifying it.

56

57
Chapter 5 - Conclusion and Future Work
In this work it was developed a deep learning model based on convolutional neural
networks (CNNs), specifically on the Fast R-CNN algorithm, that intended to be capable
of recognize and detect fashion items in a static image. With this, and to achieve the main
goal of this dissertation, it was selected three fashion items, one for each body part,
namely, lower and upper body, where it was chosen pants and shirt, respectively, and
another related to fashion accessories, being glasses the elected class. To conclude the
custom dataset to train our model was filled with close to 4400 distinct images related to
the respective fashion items to be detected and negative images, being then divided in
train dataset and test dataset.
During the work, it was created a testing plan where it was measuring the system
training time as well as the overall precision of the system on classifying and locating an
object in an image by varying two of the model main parameters (cntk_nrRois and
nmsThreshold). These results shown that overall CNNs, with the proper parameters for
each element, are certainly a good option on detecting fashion items since even with a
small dataset, it was achieved good results, being capable of detecting shirts with an
average precision of close to 78%, ~65% for pants and ~57% average precision in glasses,
achieving by now a mean average precision of ~65%.
To conclude, these results, from a training time perspective, shown good perspectives
on using CNNs for commercial purposes since with the Fast R-CNN algorithm, it was
possible to reduce the time from days to hours, requiring for this dissertation reality, the
test that took more time to execute, close to 6 hours to train by using an unique graphics
processing unit (GPU).
Concentrating on future work, even though the training time was plausible for
commercial purposes, the performance results on classifying images were a bit low,
probably due to a number of images for training plus the parameters configuration, so it
would be interesting to train a model with a considerable amount of images for each
fashion item and evaluate the impact on average precision per class. This could be
combined, by re-thinking the training methodology by using a CNN model per class,
being each one configurable with the best parameters for the respective item.

58
Finally, it would be interesting to understand how this system could be reached,
namely understand how to transform it in a software as a service where by providing an
input image, the system would detect and return each fashion items presented. This would
be a fascinating achievement since it will open doors in other systems, like image visual
similarity systems, that required as an input, images, with the required object and yet with
less noise possible, reducing its computation time by cutting it on cleaning the image.

59
Bibliography
Aljarrah, I. a, & Ghorab, A. S. (2012). Object Recognition System using Template
Matching Based on Signature and Principal Component Analysis. International
Journal of Digital Information and Wireless Communications, 2(2), 156–163.
Andrew Gibiansky. (2015). lecture 09 Convolutional Neural Network: Architectures,
Convolution/Polling Layers. CS231n Convolutional Neural Networks for Visual
Recognition.
Brinkmann, R. (2008). The Art and Science of Digital Compositing: Techniques for
Visual Effects, Animation and Motion Graphics: Second Edition. The Art and
Science of Digital Compositing: Techniques for Visual Effects, Animation and
Motion Graphics: Second Edition. https://doi.org/10.1016/B978-0-12-370638-
6.X0001-6
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., & Ramanan, D. (2009). Object
Detection with Discriminatively Trained Part Based Models. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 32(9), 1627–1645.
https://doi.org/10.1109/TPAMI.2009.167
Girshick, R. (2015). Fast R-CNN. In Proceedings of the IEEE International Conference
on Computer Vision.
Girshick, R., Donahue, J., Darrell, T., Malik, J., & Berkeley, U. C. (2012). Rich feature
hierarchies for accurate object detection and semantic segmentation.
Gomez, V. V., Cortes, A. S., & Noguer, F. M. (2015). Object Detection for Autonomous
Driving Using Deep Learning, (December).
He, K., Zhang, X., Ren, S., & Sun, J. (2015a). Delving Deep into Rectifiers: Surpassing
Human-Level Performance on ImageNet Classification. CoRR, abs/1502.0.
https://doi.org/10.1109/ICCV.2015.123
He, K., Zhang, X., Ren, S., & Sun, J. (2015b). Spatial Pyramid Pooling in Deep
Convolutional Networks for Visual Recognition. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 37(9), 1904–1916.
https://doi.org/10.1109/TPAMI.2015.2389824
Henderson, P., & Ferrari, V. (2017). End-to-end training of object class detectors for
mean average precision. Lecture Notes in Computer Science (Including Subseries

60
Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), 10115
LNCS, 198–213. https://doi.org/10.1007/978-3-319-54193-8_13
Jain, R., Kasturi, R., & Schunck, B. G. (1995). Object Recognition. Machine Vision, 459–
491.
Jing, Y., Liu, D., Kislyuk, D., Zhai, A., Xu, J., Donahue, J., & Tavel, S. (2015). Visual
Search at Pinterest. Proceedings of the 21th ACM SIGKDD International
Conference on Knowledge Discovery and Data Mining, 1889–1898.
https://doi.org/10.1145/2783258.2788621
Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012). ImageNet Classification with Deep
Convolutional Neural Networks. Advances In Neural Information Processing
Systems, 1–9. https://doi.org/http://dx.doi.org/10.1016/j.protcy.2014.09.007
Latharani, T. R., Kurian, M. Z., & M. (2011). Various Object Recognition Techniques,
7(1), 39–47.
LeCun, Y., Bengio, Y., Hinton, G., Y., L., Y., B., & G., H. (2015). Deep learning. Nature,
521(7553), 436–444. https://doi.org/10.1038/nature14539
LeCun, Y., Boser, B., Denker, J. S., Henderson, D., Howard, R. E., Hubbard, W., &
Jackel, L. D. (1989). Backpropagation Applied to Handwritten Zip Code
Recognition. Neural Computation. https://doi.org/10.1162/neco.1989.1.4.541
LeCun, Y., Bottou, L., Bengio, Y., & Haffner, P. (1998). Gradient-based learning applied
to document recognition. Proceedings of the IEEE, 86(11), 2278–2323.
Lisin, D. A., Mattar, M. A., Blaschko, M. B., Learned-Miller, E. G., & Benfield, M. C.
(2005). Combining Local and Global Image Features for Object Class Recognition.
2005 IEEE Computer Society Conference on Computer Vision and Pattern
Recognition (CVPR’05) - Workshops, 3, 47–47.
https://doi.org/10.1109/CVPR.2005.433
Nielsen, M. (2017). Deep learning. Retrieved August 21, 2017, from
http://neuralnetworksanddeeplearning.com/chap6.html
Riesenhuber, M., & Poggio, T. A. (2000). Models of object recognition. Nature
Neuroscience, 1199–1204. Retrieved from
http://www.nature.com/neuro/journal/v3/n11s/full/nn1100_1199.html%5Cnpapers:
//5860649b-6292-421d-b3aa-1b17a5231ec5/Paper/p98478

61
Selinger, a., & Nelson, R. C. (2015). Improving appearance-based object recognition in
cluttered backgrounds. Proceedings 15th International Conference on Pattern
Recognition. ICPR-2000, 1(October), 46–50.
https://doi.org/10.1109/ICPR.2000.905273
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus, R., & LeCun, Y. (2013).
OverFeat: Integrated Recognition, Localization and Detection using Convolutional
Networks. arXiv Preprint arXiv, 1312.6229. Retrieved from
http://arxiv.org/abs/1312.6229
Shi, S., Wang, Q., Xu, P., & Chu, X. (2016). Benchmarking State-of-the-Art Deep
Learning Software Tools. arXiv:1608.07249 [Cs], 6. Retrieved from
http://arxiv.org/abs/1608.07249
Szeliski, R. (2010). Computer Vision : Algorithms and Applications. Computer, 5, 832.
https://doi.org/10.1007/978-1-84882-935-0
Uijlings, J. R. R., Van De Sande, K. E. A., Gevers, T., & Smeulders, A. W. M. (2012).
Selective Search for Object Recognition. https://doi.org/10.1007/s11263-013-0620-
5
Wan, J., Wang, D., Hoi, S. C. H., Wu, P., Zhu, J., Zhang, Y., & Li, J. (2014). Deep
Learning for Content-Based Image Retrieval. Proceedings of the ACM International
Conference on Multimedia - MM ’14, 157–166.
https://doi.org/10.1145/2647868.2654948
Xiong, W., Droppo, J., Huang, X., Seide, F., Seltzer, M., Stolcke, A., … Zweig, G.
(2016). Achieving Human Parity in Conversational Speech Recognition. arXiv,
(February), 1–6. Retrieved from http://arxiv.org/abs/1610.05256

62
Appendices
5.1 Appendix A – Detected fashion items example

63

64

65