contd 140
DESCRIPTION
ctreTRANSCRIPT

Control Systems Lab (SC4070)
Lecture 3, February 08, 2010
Georg Schitter
Delft Center for Systems and ControlFaculty of Mechanical Engineering
Delft University of TechnologyThe Netherlands
e-mail: [email protected]://www.dcsc.tudelft.nl/̃ schitter
tel: 015-27 86152
70

Lecture outline
• Overview of control design methods.
• Continuous vs. discrete time design.
• State-feedback control, observers.
• PID control.
71
Linear control design methods
• P, PD, PI, PID, lead-lag control (classical)
• state-feedback, output feedback (modern)
• linear quadratic control (optimal)
• model predictive control (optimal, finite-horizon)
• robust control (H∞, µ−synthesis)
72

Nonlinear control techniques
• feedback linearization
• sliding-mode control
• model predictive control
• passivity-based control
• knowledge-based control
• adaptive control
73
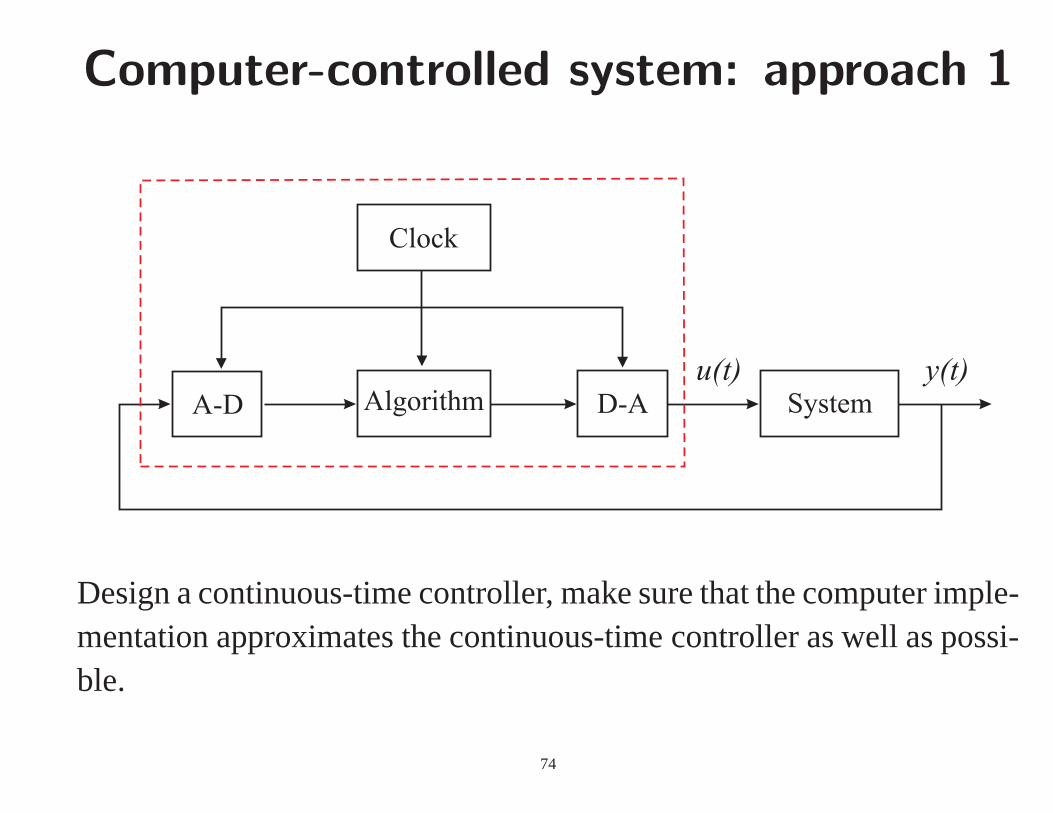
Computer-controlled system: approach 1
y(t)u(t)Algorithm
Clock
A-D D-A System
Design a continuous-time controller, make sure that the computer imple-mentation approximates the continuous-time controller aswell as possi-ble.
74
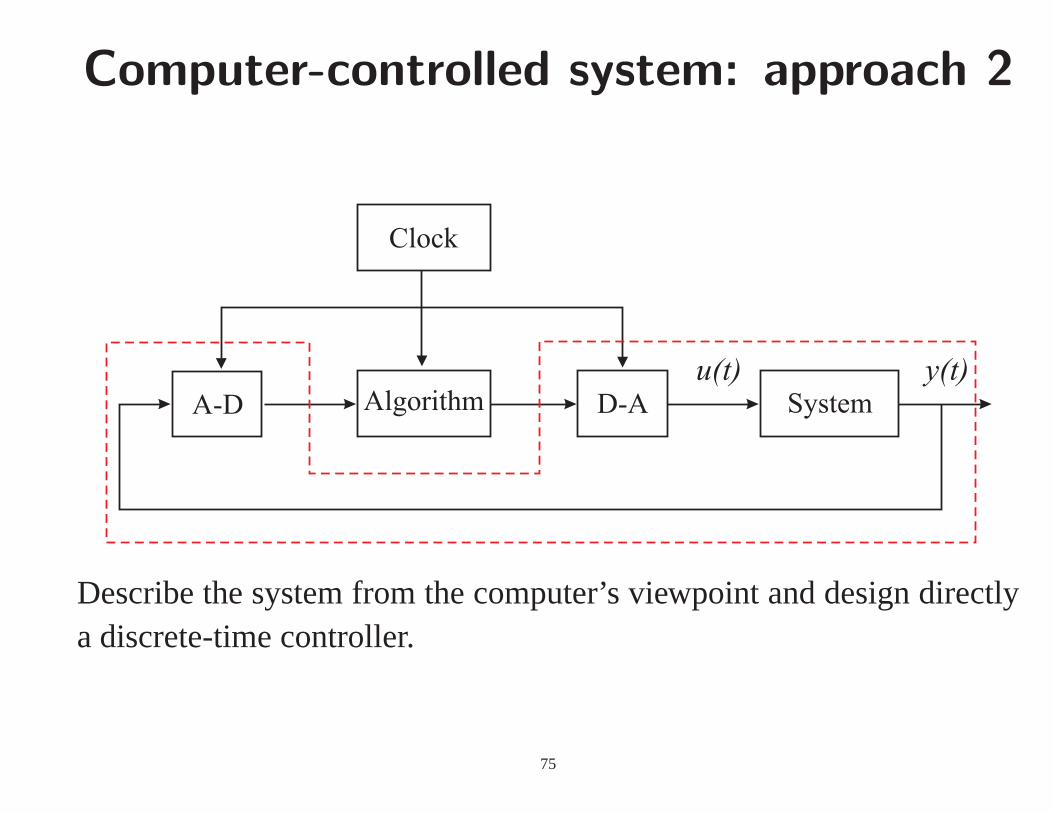
Computer-controlled system: approach 2
y(t)u(t)Algorithm
Clock
A-D D-A System
Describe the system from the computer’s viewpoint and design directlya discrete-time controller.
75

System from the computer’s viewpoint
y t( )u t( )System
Clock
{ ( )}y t k{ ( )}u tkA-DD-A
Describe system (including converters) at sampling instants only.
76

Zero-order hold
Timet t t t t t0 1 2 3 4 5
u(t) = u(tk), tk ≤ t < tk+1
Usuallytk+1− tk = const= h
77

Zero-order hold sampling of systems
Continuous-time system:
dx(t)dt
= Ax(t)+Bu(t)
y(t) = Cx(t)+Du(t)
Discrete-time system:
x(k+1) = Φx(k)+Γu(k)
y(k) = Cx(k)+Du(k)
with:
Φ = eAh , Γ =Z h
0eAsdsB, h. . . sampling period
78

MATLAB commands
G = ss(A,B,C,D); % LTI continuous-time state-space model
h = 0.1; % sampling period [s]
H = c2d(G,h); % convert to discrete time (ZOH)
G = d2c(H); % convert to continuous time (ZOH)
79

Selection of sampling period
Number of samples per rise time:Nr = Trh ≈ 4−10
0 5
−1
0
1(a)
0 50
1
0 5
−1
0
1(b)
0 50
1
0 5
−1
0
1(c)
0 50
1
0 5
−1
0
1(d)
Time
0 50
1
Time
a)Nr = 1
b) Nr = 2
c) Nr = 4
d) Nr = 8
80

Second order system
Nr = Trh ≈ 4−10 corresponds toω0h≈ 0.2−0.6
0 50
1
(a)
0 50
1
(b)
0 50
1
(c)
Time
0 50
1
(d)
Time
a) h = 0.125(ω0h = 0.23), b) h = 0.250(ω0h = 0.46),
c) h = 0.500(ω0h = 0.92), d) h = 1.000(ω0h = 1.83)
81

State feedback: basic problem formulation
• Model: x(k+1) = Φx(k)+Γu(k)
• Linear controller:
u(k) = −Lx(k)
• Design parameters: closed-loop poles, sampling interval
• Evaluation: comparex(k) andu(k) with specifications
(trade-off between control magnitude and speed of response)
82

Ackermann’s formula
ComputeL such that (Φ−ΓL) has a desired characteristic polynomial
P(z)
L = (0 . . . 0 1)W−1c P(Φ)
whereP(Φ) is the desired characteristic polynomial inΦ
in Matlab:
L = acker(Phi,Gamma,Po) (SISO, numeric problems)
L = place(Phi,Gamma,Po) (MISO, more robust)
83

Choice of desired poles
Using the continuous-time counterpart (2nd order)
s2+2ζωs+ω2
givesz2+ p1z+ p2 with
p1 = −2e−ζωhcos(
ωh√
1−ζ2)
p2 = e−2ζωh
in Matlab usec2d !
84

Linear quadratic control
J =N
∑k=1
xT(k)Qx(k)+uT(k)Ru(k)
Q, R are design parameters (weights)
A state feedback matrixL that gives a minimalJ can be found by solving
the Riccati equation.
Similar to pole placement, but no need to define poles!
In Matlab:dlqr(Phi,Gamma,Q,R) % state weighting
In Matlab:dlqry(Phi,Gamma,C,D,Q,R) % output weighting
85

State estimation: observers
x(k+1) = Φx(k)+Γu(k)
y(k) = Cx(k)
Input and output available, reconstruct the state:
• Direct calculation (requires differentiation)
• Luenberger observer (model-based)
• Kalman filter (optimal in presence of noise)
the terms “observer”, “estimator”, “filter” are in this context used syn-
onymously
86
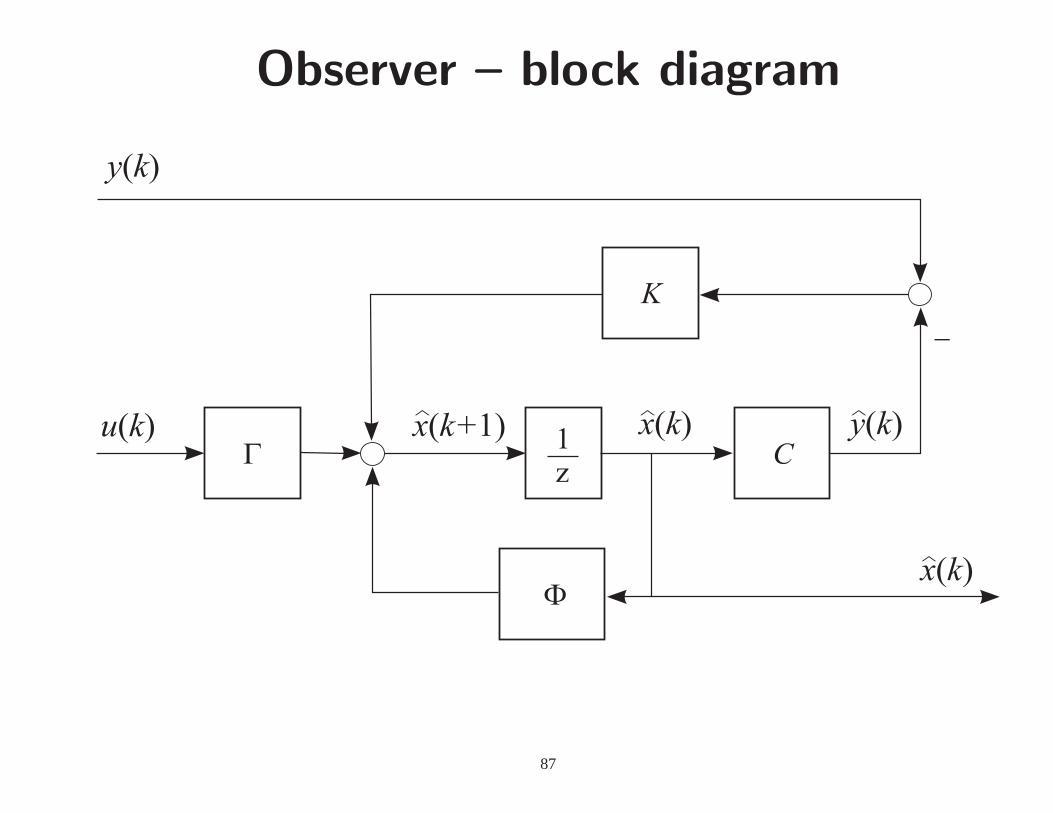
Observer – block diagram
K
1z
u k( ) x k+( 1)^ y k( )^
y k( )
Cx k( )^
x k( )^
-
87
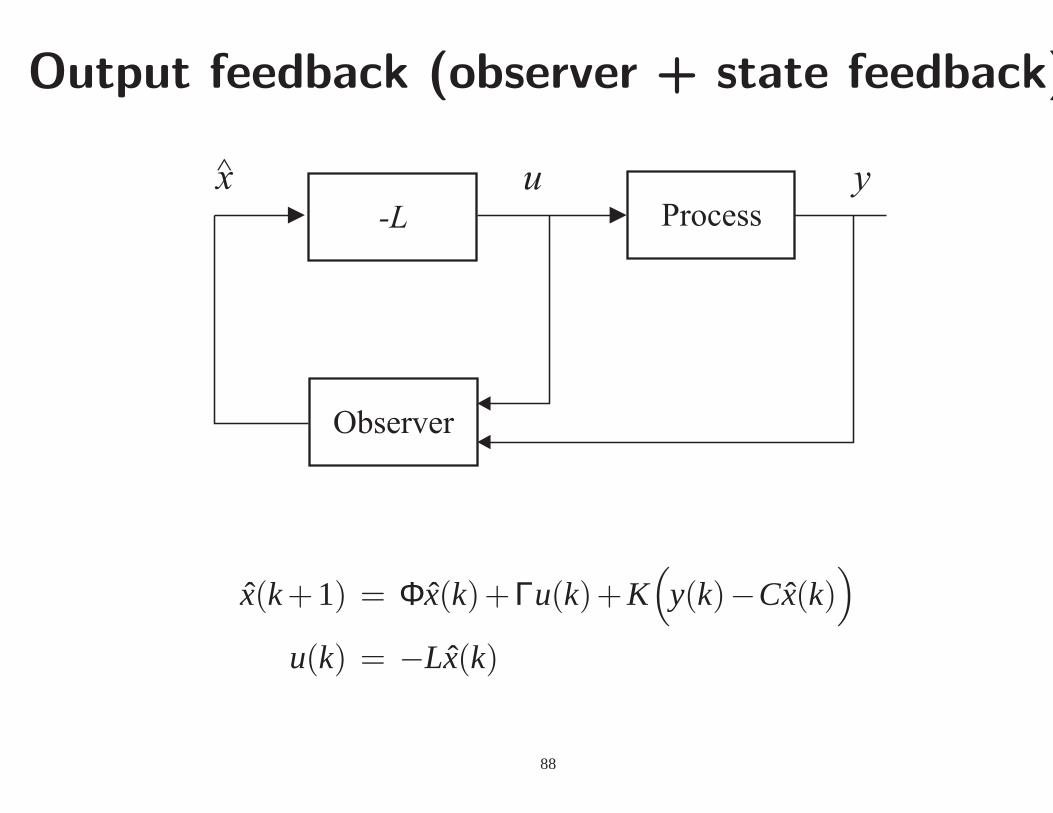
Output feedback (observer + state feedback)
x̂(k+1) = Φx̂(k)+Γu(k)+K(
y(k)−Cx̂(k))
u(k) = −Lx̂(k)
88

Poles of the closed-loop system
x(k+1) = Φx(k)+Γu(k)
e(k+1) = (Φ−KC)e(k)
u(k) = −L(x(k)−e(k))
x(k+1)
e(k+1)
=
Φ−ΓL ΓL
0 Φ−KC
x(k)
e(k)
Process poles:Ar(z) = det(zI−Φ+ΓL)
Observer poles:Ao(z) = det(zI−Φ+KC)
Separation principle
89

Servo case (two-degree-of-freedom)
Goal: respond to a reference signal in a specified way.Replaceu(k) = −Lx̂(k) by: u(k) = −Lx̂(k)+Lcuc(k)
ux^
Lc
Observer
Process-L
uc
y
90
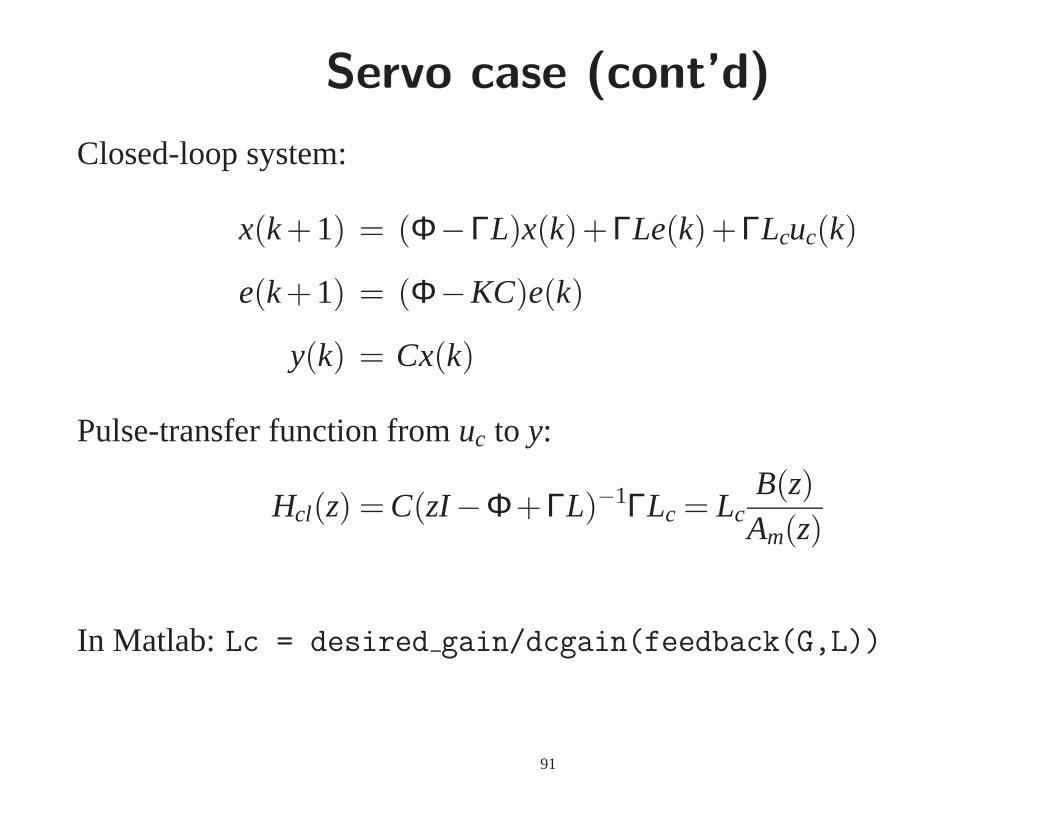
Servo case (cont’d)
Closed-loop system:
x(k+1) = (Φ−ΓL)x(k)+ΓLe(k)+ΓLcuc(k)
e(k+1) = (Φ−KC)e(k)
y(k) = Cx(k)
Pulse-transfer function fromuc to y:
Hcl(z) = C(zI−Φ+ΓL)−1ΓLc = LcB(z)Am(z)
In Matlab:Lc = desired gain/dcgain(feedback(G,L))
91

Application to a nonlinear system
Feedbackcontroller
ReferenceNonlinear
system
-
+
+
y0
y-
u0
+
+
+
y0
Feedforwardcontroller
Linear controllers must use signalsu, y, x !
92

PID control
The ”textbook” version
u(t) = K
(
e(t)+1Ti
Z t
e(s)ds+Tdde(t)
dt
)
More realistic PID controller:
U(s) = K
(
bUc(s)−Y(s)+1
sTi(Uc(s)−Y(s))−
sTd
1+sTd/NY(s)
)
93

Discrete-time PID
P-term:P(k) = K(buc(k)−y(k))
I-term: I(k+1) = I(k)+ KTi
e(k)
D-term: D(k) = TdTd+NhD(k−1)− KTdN
Td+Nh(y(k)−y(k−1))
u(k) = P(k)+ I(k)+D(k)
94

PID tuning
• Pole placement
• Root locus
• Bode diagram
• Tuning rules (Ziegler-Nichols,λ−tuning)
G(s) = e−t0s Kp
(τs+1)⇒ Kc =
τKp(λ+ t0)
, Ti = τ, Td =t02
95

Cascade control (example: inverted pendulum)
Reference Position controller Inverted
pendulumAngle
controller
96

Model-based adaptive control
u
Adaptation
Design parameters
Controller
-
Process
Linearmodel
yr
ym
97