control
DESCRIPTION
Environment. Actuator Motions. Raw Sensor Input. Robot states. Actuators. Sensing. State Info. Conditioned Sensor Input. Observation. Learning Trigger. Control. Learning. Commands. Behavior Controller. Sensor/action pairs. A-D on sound card. microphone. - PowerPoint PPT PresentationTRANSCRIPT

Control Learning
SensingActuators
Environment
Environment
Observation
Robot states
Learning Trigger
State Info
Behavior ControllerCommands
Actuator Motions
Raw SensorInput
ConditionedSensorInput
Sensor/action pairs

microphone
FFT
/* Sum up power in chirp. */Sum = 0For j = start freq, end freq Sum = FFTpower[j] + SumEnd j
Average Power = Sum/chirp freq range
¼ second of data
A-D on sound card
Zero pad
Note: This process occurs for each microphone at a rate of 4 times a second. In order to smooth out the amplitudes associatedwith intermittent chirps, the average power is kept as a running averageover 1 second.

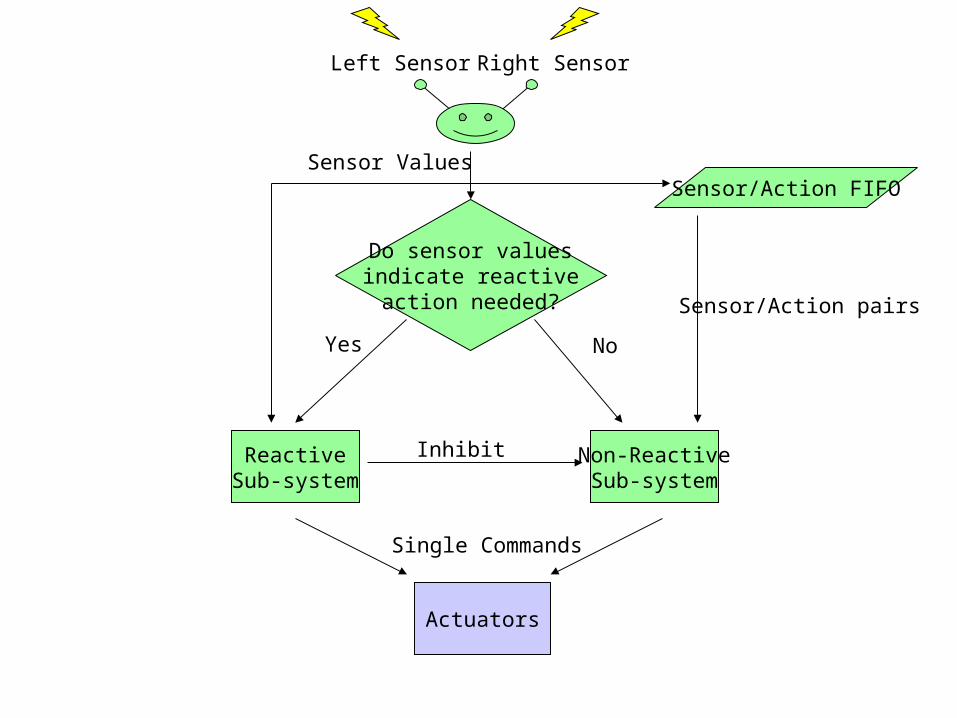
Left Sensor Right Sensor
Are changes in Sensor values
extreme?
ReactiveSub-system
Non-ReactiveSub-system
Sensor/Action pairs
Actuators
Single Commands
Sensor Values
Yes No
Sensor/Action FIFO
Left Sensor Right Sensor
Do sensor valuesindicate reactiveaction needed?
ReactiveSub-system
Non-ReactiveSub-system
Sensor/Action pairs
Actuators
Single Commands
Sensor Values
Yes No
Sensor/Action FIFO
Inhibit

Left Sensor Right Sensor
Are changes in Sensor values
extreme?
ReactiveSub-system
Non-ReactiveSub-system
Sensor/Action pairs
Actuators
Single Commands
Inhibit
Sensor Values
Yes No
Sensor/Action FIFO
Action Sequence
Library
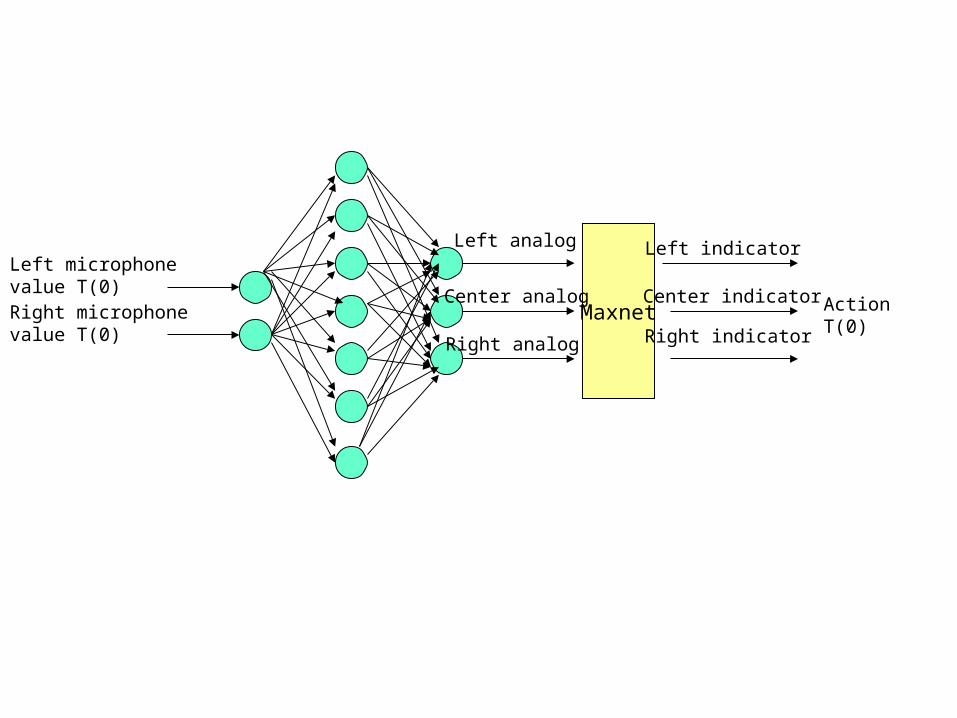
Maxnet
Left microphone value T(0)
Right microphone value T(0)
Left analog
Center analog
Right analog
Left indicator
Center indicator
Right indicator
Action T(0)

Maxnet
Left micropone trend from times
T(0) – T(-n)
Left analog
Center analog
Right analog
Left indicator
Center indicator
Right indicator
Action T(0)
Right microphone trend from times
T(0) – T(-n)
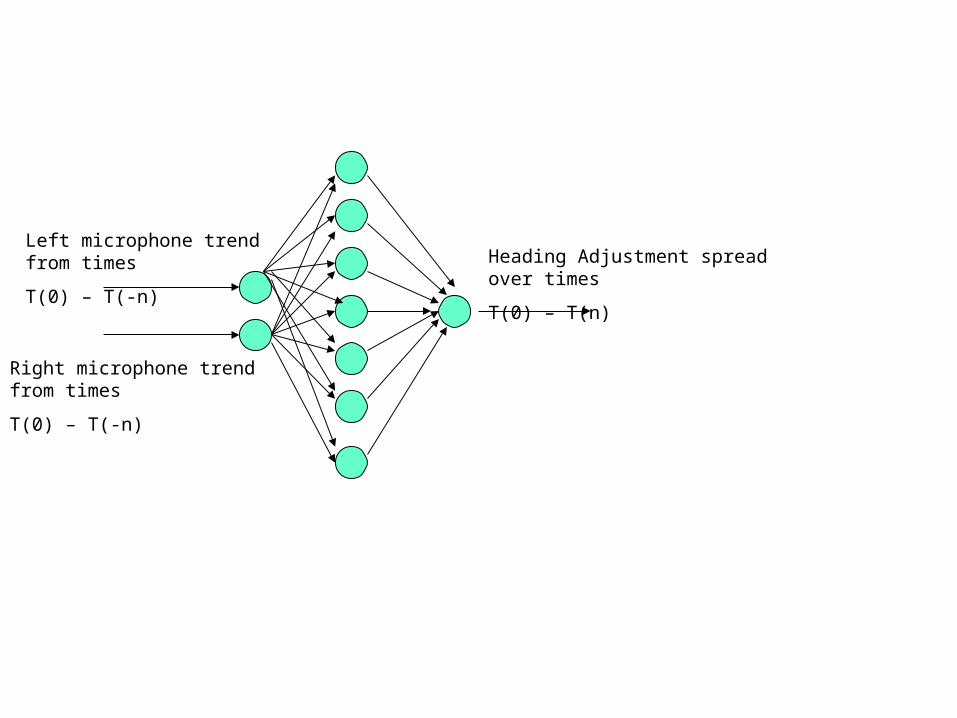
Left microphone trend from times
T(0) – T(-n)Heading Adjustment spread over times
T(0) – T(n)
Right microphone trend from times
T(0) – T(-n)

Heading AdjustmentLeft microphone value T(0)
Right microphone value T(0)
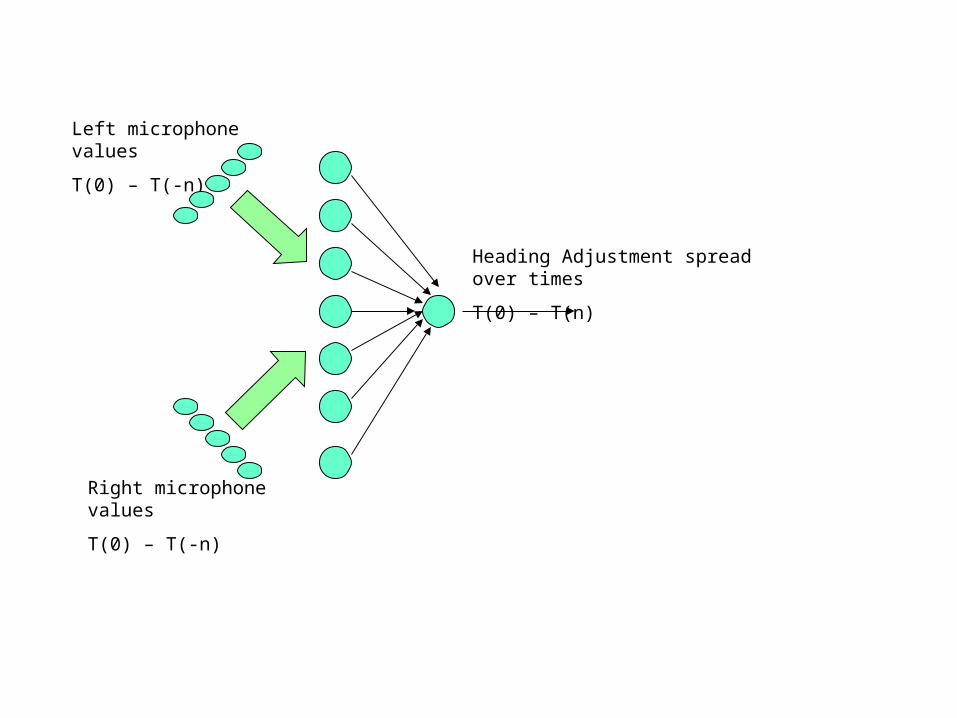
Left microphone values
T(0) – T(-n)
Right microphone values
T(0) – T(-n)
Heading Adjustment spread over times
T(0) – T(n)
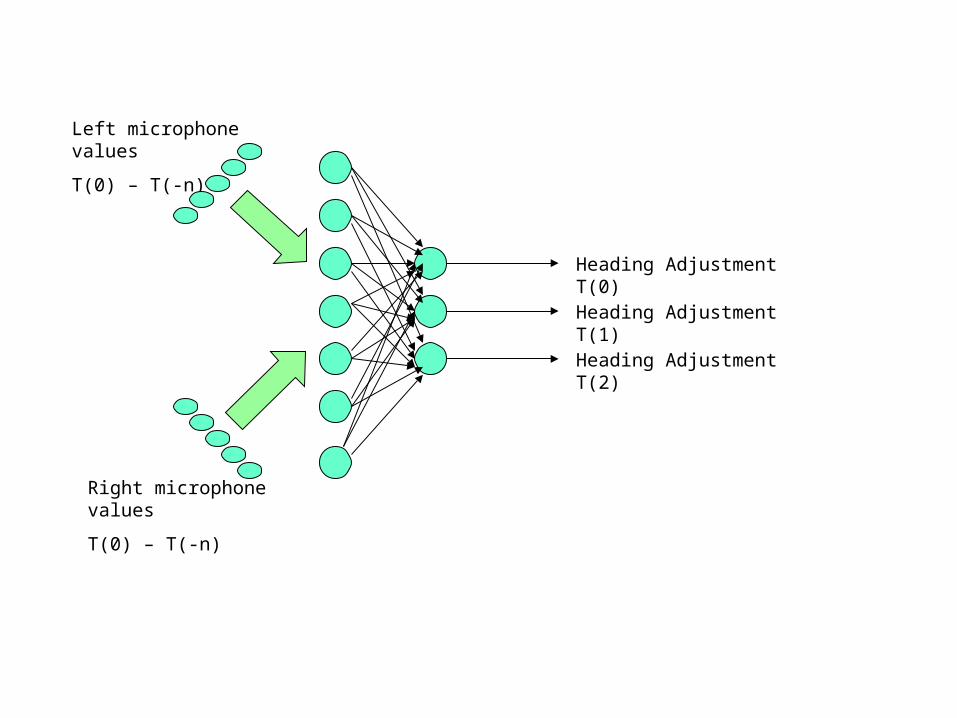
Left microphone values
T(0) – T(-n)
Right microphone values
T(0) – T(-n)
Heading Adjustment T(0)
Heading Adjustment T(1)
Heading Adjustment T(2)

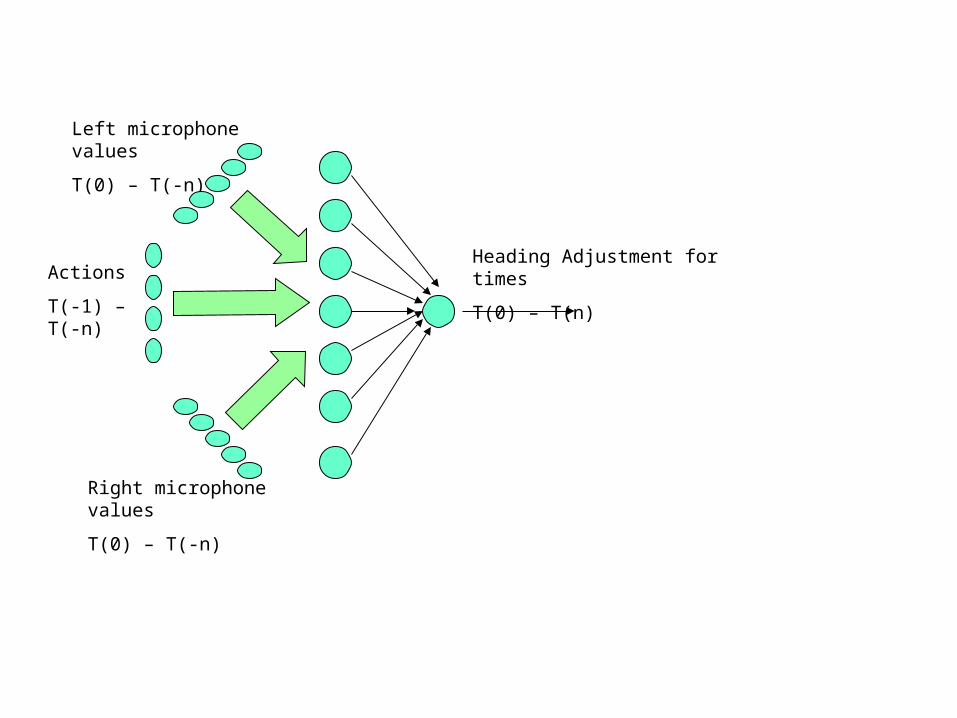
Left microphone values
T(0) – T(-n)
Right microphone values
T(0) – T(-n)
Actions
T(-1) – T(-n)
Heading Adjustment for times
T(0) – T(n)
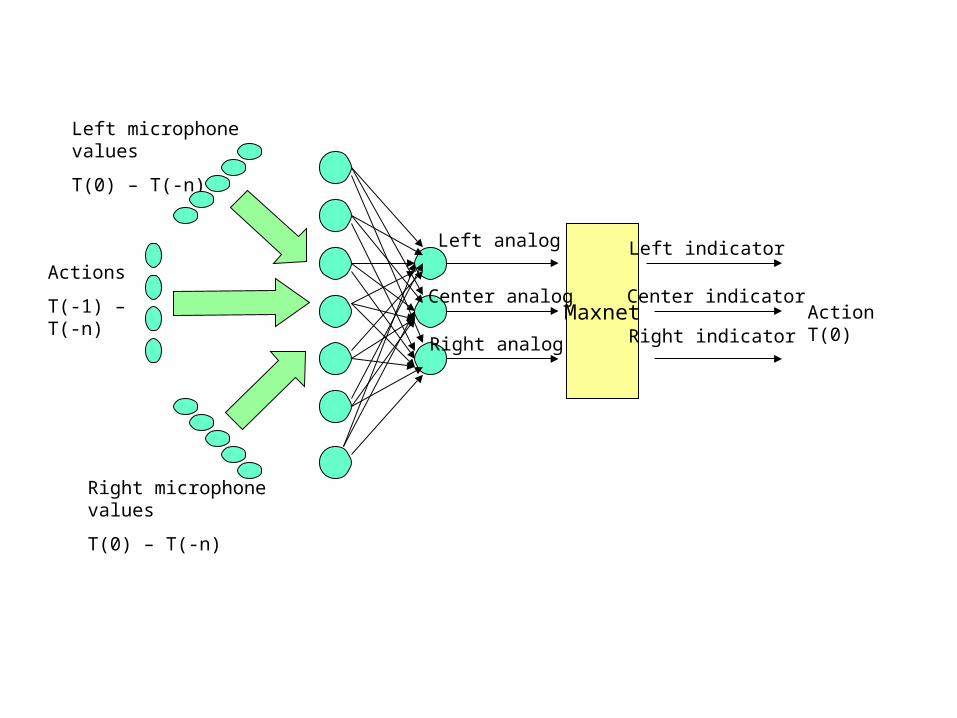
Maxnet
Left microphone values
T(0) – T(-n)
Left analog
Center analog
Right analog
Left indicator
Center indicator
Right indicator
Right microphone values
T(0) – T(-n)
Actions
T(-1) – T(-n) Action T(0)


Maxnet
Left microphone values
T(0) – T(-n) Left indicatorCenter indicator
Right indicator
Right microphone values
T(0) – T(-n)
Actions
T(-1) – T(-n)
Action T(0)
LCR
LCR
LCR
Action T(1)
Action T(2)
Action T(3)
Maxnet
Maxnet
Maxnet

Robot states
Is reactivesystem beingcalled often?
Are goal statesbeing met?
yes
Trigger Reactive andnon-reactive
learning systems
no
Is the core routine running and is there enough memory
to learn from?
Trigger Reactive andnon-reactive
learning systems
yes

Reactive Memory Preparation
Non-Reactive Memory Preparation
Sensor/Action FIFO
Reactive BehaviorGeneration
Non-reactive BehaviorGeneration
Non - reactive MemoryReactive Memory
Output of process is atrained reactive NN
Output of process is atrained non-reactive NN

Intensity Filter
Negative and PositiveExample Set Creation
Correct Action Marking
GA trains feed-forward NNto select the correct action
given the sensor input.
Output of process is atrained NN
Reactive Memory

Kohonen SOFM
Non - reactive Memory
Codebook
Codebook mirror process
GA trains feed-forward NN using codebook and fitness function that maximizes sensor energyand minimizes changes in direction.
Output of process is atrained NN
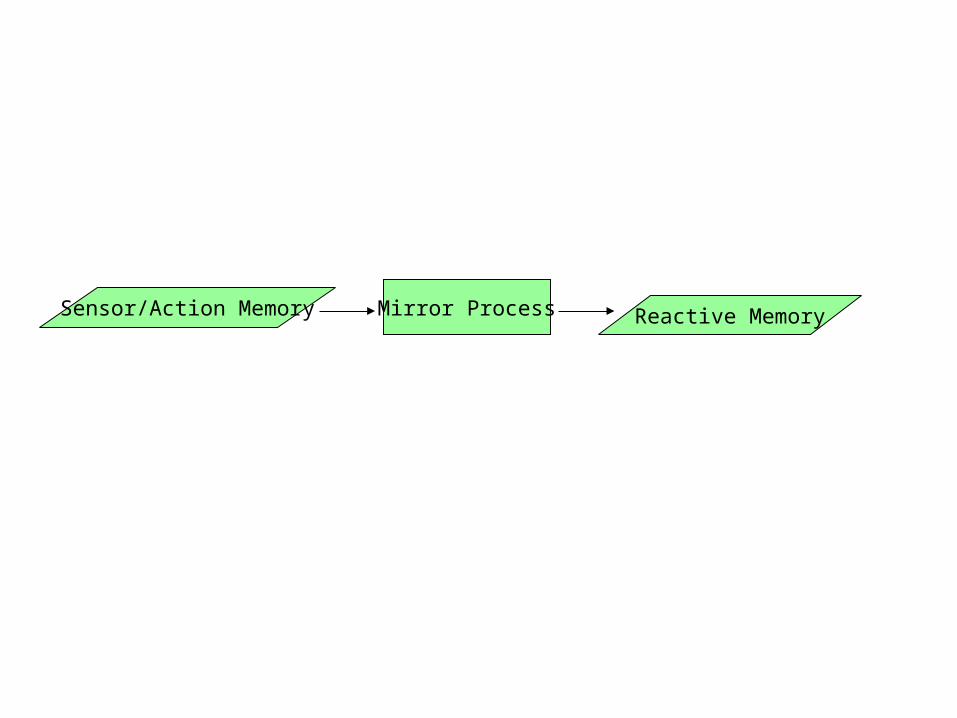
Mirror ProcessSensor/Action Memory Reactive Memory

Correlation ClusterSet Creation
Sensor/Action Memory pairs
Is recent memory a member of the
Cluster Set?
Recent pastMemory fromT0 to T-n
Add recent memoryto Non-reactive Memory, mirror, and update miss
count
Update hit count
Yes No
Recent memory
Reactive Memory
Sensor FIFO
Non - reactive Memory
Cluster Set


Recent Memory
SOFM Codebook
0)LIRA
1)LIRA
2)LIRA
0)LIRA
1)LIRA
2)LIRA
0)LIRA
1)LIRA
2)LIRA
0)LIRA
1)LIRA
2)LIRA
1)LIR
2)LIRAAction
1)LIRA
2)LIRA
Feed forward NN
SOFM Codebook Entry
New action replaces old action.New situation made in scratch area.
0)LIRA
1)LIRA
2)LIRA
Close match found inSOFM codebook Intensity value
from LIRA(0)used infitness functionof GA
Kohonen

Recent Memory
RBF Codebook
0)LIRA
1)LIRA
2)LIRA
Feed forward NN
RBF Network
RBF entry (j)Target for RBF entry (j) isRBF entry (m)
0) A
1) A
2) A
Input to NN is pastvalues from RBF codebook entries.
0)LIRA
1)LIRA
2)LIRA
GA uses actions from target entry to train NN.