control engineering project submission
TRANSCRIPT

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 1/19
F = kθθ

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 2/19
G(s)
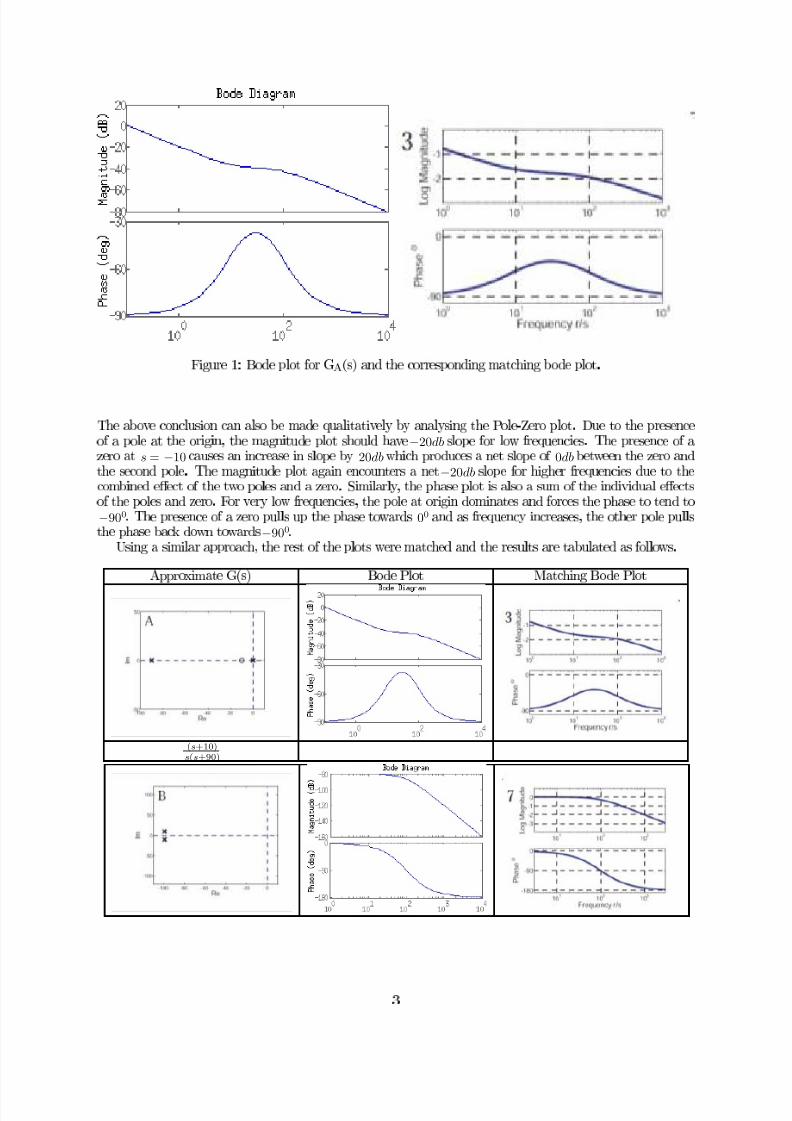
GA(s) = (s + 10)
s(s + 90)
℄
℄
8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 3/19

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 4/19
1(s+100+i10)(s+100−i10)
(s+300)(s+40)
(s+10)s(s+20+i100)(s+20−i100)
(s+10)(s+150)
(s+8+i60)(s+8−i60)(s+1+i10)(s+1−i10)

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 5/19

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 6/19
GA(s)
jω
ζ ∼ 0.1 ωn ∼ 10 M p = e−ζΠ√ 1−ζ2 = 73.04%
Lims→0sG(s)1s
= 0.01
1(s+1−i10)(s+1+i10)
s+300s+25
8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 7/19
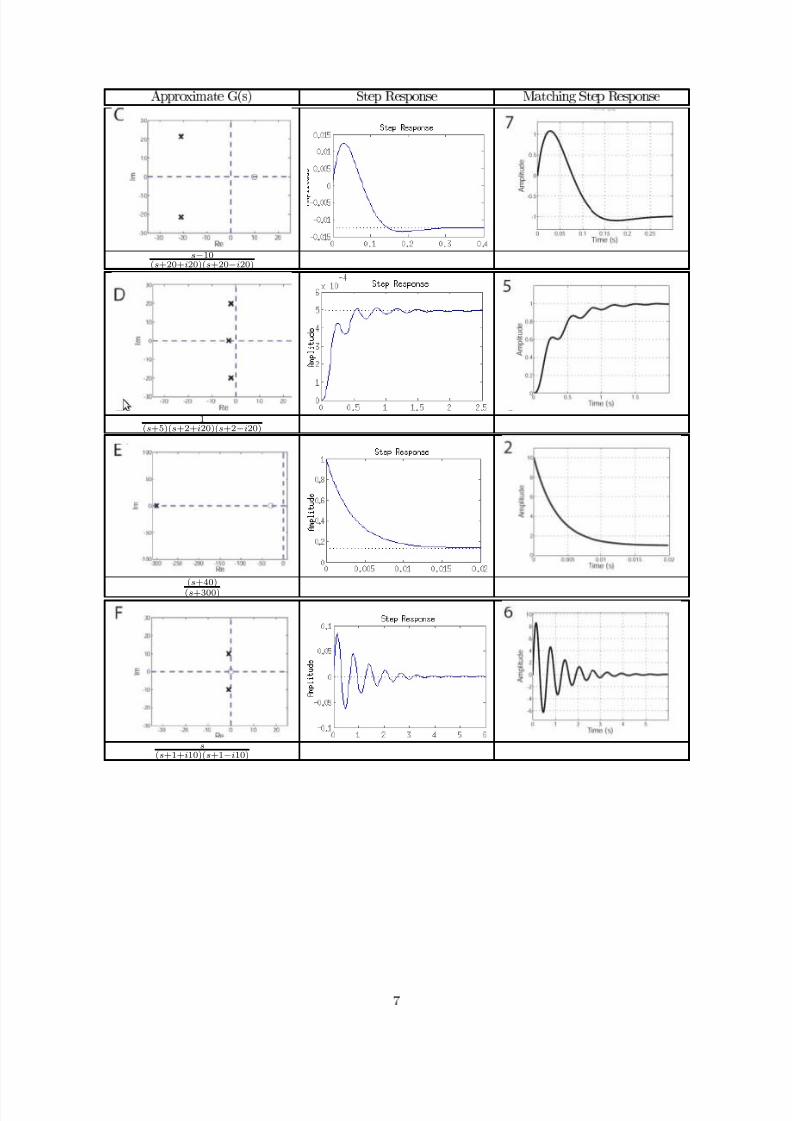
s−10(s+20+i20)(s+20−i20)
1(s+5)(s+2+i20)(s+2−i20)
(s+40)(s+300)
s(s+1+i10)(s+1−i10)
8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 8/19
Gc(s)G p(s) = H 1(s) = (s + α)
s3 + (1 + α)s2 + (α− 1)s + (1− α)
α < ±10%
K p
Steady StateE rror = 1
1 + K p≤ 0.1
=⇒ K p ≥ 9
K p = lims→0 H 1(s) = lims→0(s+α)
s3+(1+α)s2+(α−1)s+(1−α) = α1−α
≥ 9 =⇒ α ≥ 0.9
α
H 1(s) s3+(1+α)s2+(α−1)s+(1−α) = (s3+s2−s+1)+α(s2+s−1)
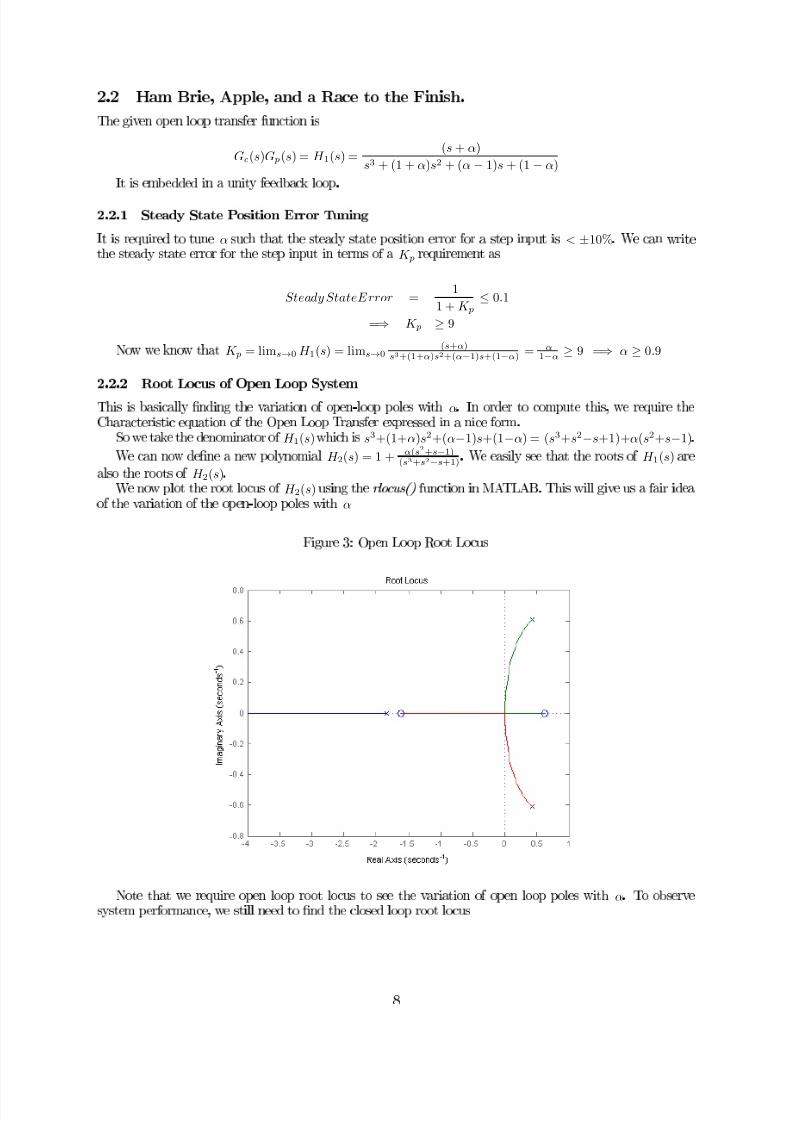
H 2(s) = 1 + α(s2+s−1)(s3+s2−s+1) H 1(s)
H 2(s)
H 2(s)
α
α

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 9/19
H (s) = H 1(s)1+H 1(s) .
1+H 1(s) = 0 =⇒ 1+ (s+α)
s3+(1+α)s2+(α−1)s+(1−α) = 0 =⇒ s3+(1+α)s2+αs+1 = 0
α (s3+s2+1)+α(s2+s) = 0
H 3(s) = s2+ss3+s2+1 1 + H 3(s) = 0
−0.469 α = 4.48
α = 4.48
2nd 2 = 4
ξωn
ξωn α = 4.48
8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 10/19
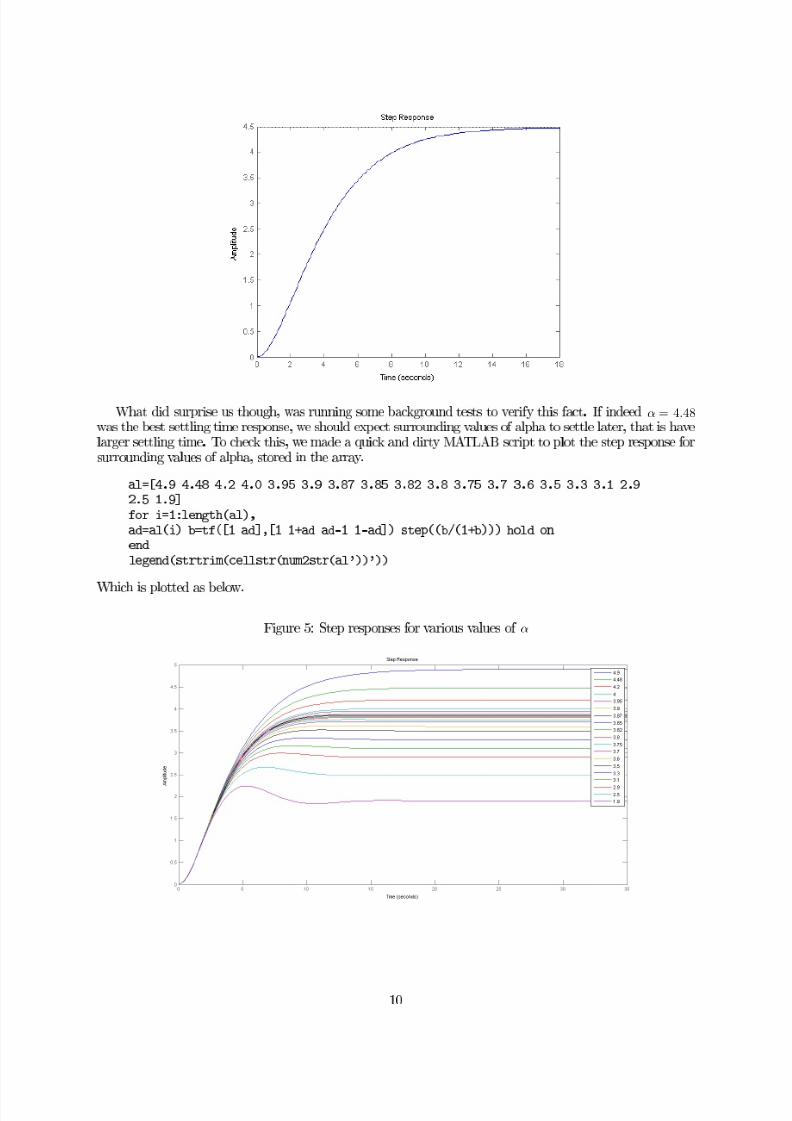
α = 4.48
℄
℄ ℄
α

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 11/19
α > 4.48
αjust < 4.48
3.8
11.3s
α = 3.82
α < 3.82
α
G(s) = 1(s+1)3
H (s) = KG(s)1+KG(s) = 1
(s+1)3+K
Characteristic Equation = s3 + 3s2 + 3s + (K + 1)
s3
s2
s 8−K 3
1
0 < K < 8
8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 12/19
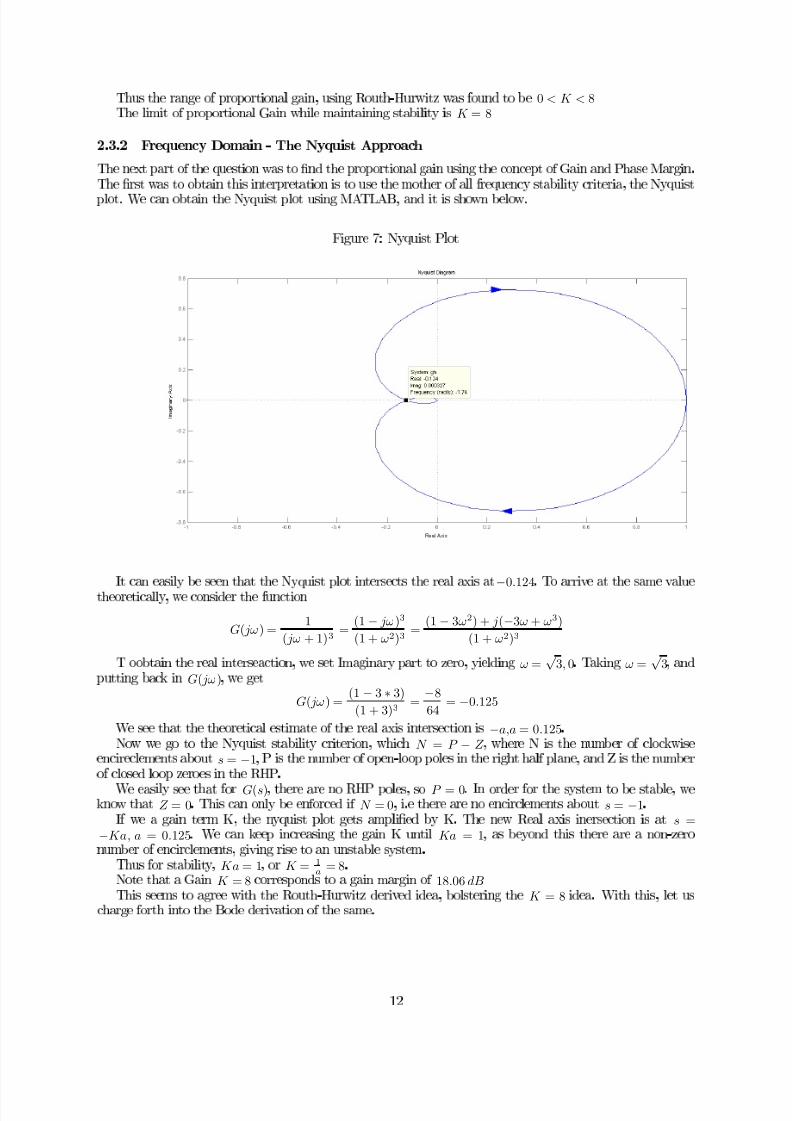
0 < K < 8 K = 8
−0.124
G( jω) = 1
( jω + 1)3 =
(1− jω)3
(1 + ω2)3 =
(1− 3ω2) + j(−3ω + ω3)
(1 + ω2)3
ω =√
3, 0 ω =√
3
G( jω)
G( jω) = (1− 3 ∗ 3)
(1 + 3)3 = −8
64 = −0.125
−a,a = 0.125
N = P − Z
s = −1
G(s) P = 0
Z = 0 N = 0 s = −1
s =−Ka, a = 0.125 Ka = 1
Ka = 1 K = 1a
= 8
K = 8 18.06 dB
K = 8

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 13/19
18.1 dB 20 log(K ) = 18.1 dB K = 8.035
℄
K = 8.0011
Range of P roportional Gain K
∈[0, 8]

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 14/19
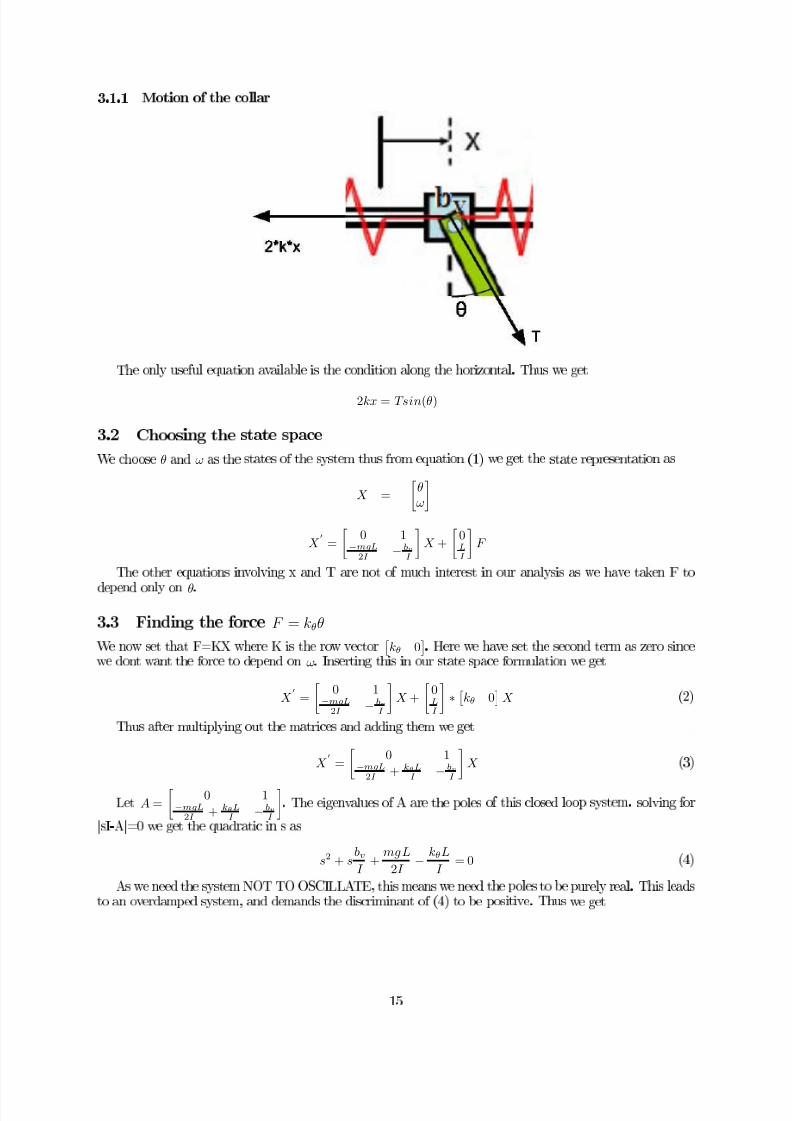
kx F = kxx + kθθ
θ, ω α
θ
Iα = F L− bvω − mgLsin(θ)
2
sin(θ) θ
Iα = F L− bvω − mgLθ
2
mω2L
2 = T − mgcos(θ)
8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 15/19
2kx = Tsin(θ)
θ ω
X =
θ
ω
X ′
=
0 1−mgL2I
− bvI
X +
0LI
F
θ
F = kθθ
kθ 0
ω
X ′
=
0 1−mgL2I
− bvI
X +
0LI
∗
kθ 0
X
X ′
= 0 1
−mgL
2I + kθL
I −bv
I X
A =
0 1
−mgL2I
+ kθLI − bv
I
s2 + sbv
I +
mg L
2I − kθL
I = 0

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 16/19
b2vI 2 ≥ 4(
mgL
2I − kθL
I )
kθ
kθ ≤mg
2 − b2v
4IL
kθ = mg
2 − b2v
4IL
kθ > mg
2 − b2v
2IL
F = kxx + kθθ x
θ
x θ
8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 17/19
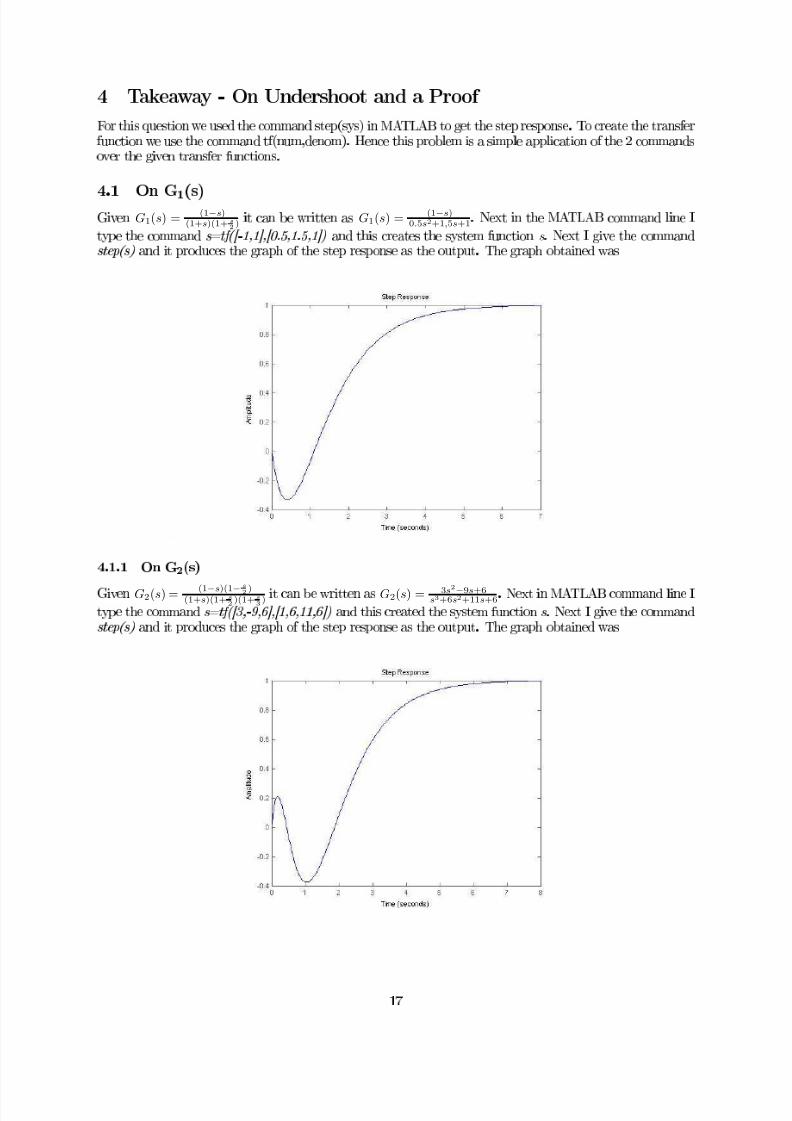
G1(s) = (1−s)(1+s)(1+ s
2) G1(s) =
(1−s)0.5s2+1,5s+1
℄ ℄ s
G2(s) = (1−s)(1− s
2)
(1+s)(1+ s2)(1+ s
3) G2(s) = 3s2−9s+6
s3+6s2+11s+6
℄ ℄

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 18/19
G1(s)
G2(s)
limt→0f (0) = lims→∞sF (s)
H (s)s
H (s)s
limt→00f ′(0) = lims→∞sH (s)
∞
∞
(1−s)0.5s2+1,5s+1
∞
∞
3s2−9s+6s3+6s2+11s+6
H (s)s
H (s)s
srU (s)
U (s) = H (s)
s
sr−1U (s)
∞srH (s)

8/13/2019 Control Engineering Project Submission
http://slidepdf.com/reader/full/control-engineering-project-submission 19/19
H (s) = K
(s− zi)(s− zi∗)
(s− zj)
(s + zk)
(s− pm)(s− pm∗)
(s + pn)
K (s−zi)(s−zi∗)
(s−zj)
(s+zk)
(s− pm)(s− pm∗)(s+ pn)
S = K ( |zi|2)(−1)b(
zj)(
zk)( | pm|2)(
pn)
∞sr
H (s)
D = lims−>∞sr.K
(s− zi)(s− zi∗)
(s− zj)
(s + zk)
(s− pm)(s− pm∗)
(s + pn)
∞
K 2( |zi|2)(−1)b(
zj)(
zk)( | pm|2)(
pn)
< 0