control methods corr - eatis.org · de apf se debe conocer el comportamiento del convertidor ......
TRANSCRIPT

Current Control Methods for Shunt Power Active Filters to reduce Harmonic Content in Electrical Systems
Fabián Jiménez López MSc. Ingeniería Electrónica
Facultad de Ingeniería Electrónica Universidad Santo Tomas Tunja
Calle 19 No. 11 – 64 Tunja, Colombia (05) (98) 74440404
Pedro Fabián Cárdenas Herrera MSc. Ingeniería Electrónica
Facultad de Ingeniería Mecatrónica Universidad Nacional de Colombia
Carrera 30 No. 45-03 – Edificio 453 (05) (91) 3165000 Ext. 14120
ABSTRACT Power active filters have become a viable alternative for controlling harmonic levels in industrial and commercial applications. However, there are many different current control techniques for active filters. This paper discusses the state of the art of performance of the main control innovations determined by industrial applications about the active power filters used to damp and compensate the harmonics in electrical systems. The impact of this technology reduces the power consumption of non-linear loads such as computer equipments.
Categorías y Descriptores del Tema [Power Control Systems]: Los sistemas de control de convertidores de potencia se caracterizan por temáticas como topologías de convertidores, diseño de circuitos de potencia, diseño de estrategias de control, instrumentación de señales de corriente, voltaje y procesamiento de señales mediante el uso de transformaciones vectoriales.
Términos Generales Algoritmos, Instrumentación Electrónica, Desempeño de Controladores, Diseño de Sistemas de Control, Experimentación, Verificación.
Keywords Digital Control, Active Filters, Power Compensation, Current Control, Harmonics, Power Quality, Energy Efficient Systems.
1. INTRODUCCION Este documento proporciona la descripción de algunas estrategias básicas y avanzadas para el control de Filtros Activos de Potencia (Active Power Filters - APF). Para el diseño de los controladores de APF se debe conocer el comportamiento del convertidor electrónico de potencia y como diseñar sus elementos para los
modos de operación previstos, además se debe estar al tanto de las técnicas de control (no lineal especialmente), puesto que los APF son sistemas no lineales, variantes en el tiempo y discretos.
Los APF y su sistema de control de corriente debe tener la capacidad de rastrear variaciones repentinas de la corriente de referencia, que corresponden a valores muy altos de di/dt, y esto hace del diseño del control y la implementación practica del filtro, una tarea particularmente crítica.
El contenido de este documento inicialmente se centra en la identificación de los criterios apropiados para comparar correctamente el desempeño de los controladores de corriente. A continuación, se hace una descripción corta de los principios de tres técnicas de control para APF, siendo el control lineal de corriente, el control digital por DeadBeat, y el control por histéresis [1]-[4]. Seguidamente se presentan las características principales de las estrategias avanzadas de control y se termina con la descripción del sistema a simular.
Al final del documento se analizan los resultados de la comparación de dos estrategias de control lineal de corriente mediante transformación d-q y mediante el uso de un lazo de seguimiento de fase aplicados a dos tipos de cargas no lineales, un rectificador trifásico no controlado y un rectificador trifásico controlado.
2. CRITERIOS PARA LA COMPARACIÓN DE LOS CONTROLADORES DE CORRIENTE Un punto clave en la evaluación comparativa de diversas estrategias de control, junto con la selección de una aplicación o situación real para realizar su verificación, es la definición de los criterios más apropiados [5] para evaluar el nivel de desempeño proporcionado por cada una de las técnicas consideradas.
Si se tiene una aplicación especifica de un APF, un criterio inmediato para la evaluación de la calidad del control es la medición de la Distorsión Armónica Total (Total Harmonic Distortion – THD) de la forma de onda de corriente en la línea. Este parámetro da una información directa sobre la capacidad del control para eliminar la contaminación armónica de corriente presente en la red. Dos criterios adicionales se consideran también, uno es el cálculo de la tensión en el capacitor almacenador de energía del APF, que está relacionado con la
Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, or republish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. Conference’04, Month 1–2, 2004, City, State, Country. Copyright 2004 ACM 1-58113-000-0/00/0004…$5.00.

energía que permite al APF inyectar en la red las corrientes de compensación apropiadas y, por tanto, este parámetro establece un indicador del funcionamiento dinámico del controlador de corriente.
El último criterio considerado, es la evaluación del espectro de corriente de la línea que permite identificar la distribución de armónicos de corriente en los diferentes rangos de frecuencia. Estos parámetros son muy importantes pues evalúan la capacidad de las diversas técnicas de control para que cumplan con los requisitos de los estándares propuestos por la Comisión Electrotécnica Internacional (International Electrotechnical Commission – IEC).
3. TÉCNICAS DE CONTROL DE CORRIENTE Esta sección presenta las técnicas de control consideradas, proporcionando para cada una de ellas, una breve descripción de sus características básicas y la discusión de sus particularidades principales de implementación. A continuación, se asumirá que el convertidor usado como filtro activo opera como fuente de corriente controlada. La corriente de fase generada, por tanto, rastrea una referencia obtenida por sustracción de la corriente presente en la carga de la corriente de línea deseada, para compensar la corriente de línea [6] y [7].
3.1 Control Lineal de Corriente La versión convencional del controlador de corriente lineal realiza una modulación sinusoidal PWM de voltaje para el convertidor de potencia, usando como señal de modulación el error de corriente filtrado por un controlador proporcional integral (PI). Aquí se considera la implementación análoga original de la técnica de Modulación por Ancho de Pulso (Pulse Wide Modulation – PWM), puesto que esta situación asegura al sistema la velocidad de respuesta más rápida posible. Un cambio repentino en la señal de modulación es instantáneamente reflejada en una variación del ciclo de trabajo de la señal PWM, sin el retraso inevitable que se presenta a una mitad del período de modulación presente por ejemplo en la modulación PWM vectorial (Space Vector Modulation SVM), o a un período completo de la modulación, en el caso del PWM muestreado.
La aplicación de estas técnicas de modulación solamente puede reducir la velocidad de respuesta del sistema. Sin embargo, la técnica de Control Lineal de Corriente con PWM análogo es simple e implementable por medio del montaje de su circuito análogo, pero su desempeño es algo insatisfactorio. Esto se debe principalmente a la limitación del ancho de banda que puede tener el sistema electrónico, ya que, es implícita la necesidad de filtrar el rizado en la señal de modulación. Esta necesidad obliga a mantener la frecuencia de corte de la ganancia de lazo por debajo de la frecuencia de modulación, y este aspecto se refleja en un pobre rechazo de las perturbaciones inyectadas en el lazo de control de corriente, principalmente debido a la línea de tensión de CA en la frecuencia fundamental. Para superar esta limitación, las versiones recientes de sistemas de control lineal de corriente explotan la transformación d-q. Las variables de control se mapean en un eje rotativo de acuerdo al esquema representado en la Figura 1. Se observa que para este tipo de aplicación, no es necesario conocer el ángulo de fase instantáneo de las formas de onda sinusoidales para realizar la transformación d-q [8]. La principal ventaja de esta solución es que las componentes armónicas fundamentales de las señales de voltaje y de corriente ingresan como valores escalares al controlador de corriente. Por lo tanto, el voltaje de línea que es casi sinusoidal, es considerado por el controlador de corriente como un valor constante, y en consecuencia el rechazo de perturbaciones es mucho más efectivo. De otra parte, la limitación del ancho de banda del controlador PI todavía implica la presencia de errores significativos en el rastreo o seguimiento de las componentes armónicas de mayor orden de la corriente de referencia. En las aplicaciones de los filtros activos, estos errores se ven reflejados en una compensación insatisfactoria o de pobre calidad.
3.2 Control Digital DeadBeat En la implementación convencional de un controlador de corriente digital, el control calcula la fase del voltaje para hacer que la fase de la corriente alcance su referencia al finalizar el siguiente período de modulación. Los cálculos se realizan a menudo en el plano αβ (Transformación de Clarke), y la estrategia de modulación vectorial SVM, la cual se implementa muy fácilmente en forma digital, ya que entrega los pulsos de conmutación al convertidor. Ésta técnica se representa en la Figura 2.
Figura. 2. Esquema básico de un controlador de corriente digital DeadBeat.
Figura. 1. Diagrama básico de un controlador lineal de corriente lineal con transformación d-q; iF es el vector
de corrientes del filtro activo (marco abc).
Una ventaja importante de la técnica DeadBeat, es que no requiere la medición del voltaje de línea para generar la referencia de corriente. El algoritmo de control DeadBeat involucra una estimación del valor instantáneo del voltaje de línea, que puede por tanto, también ser utilizado para la generación de la referencia de corriente y adicionalmente se debe tener en cuenta que el retardo presente debido a los cálculos es una seria desventaja para esta técnica [9] y [10].
La elevada velocidad de respuesta requerida es la principal limitación para la aplicación de esta técnica en el APF y si no se cumplen los requerimientos mínimos de velocidad, el desempeño puede ser insatisfactorio. En las versiones más recientes del controlador DeadBeat, este retardo se reduce muestreando las variables de control y ejecutando las rutinas de control dos veces en un período de modulación. Los tiempos de activación y desactivación de los interruptores del convertidor de potencia se implementan por separado en dos períodos sucesivos de control. En consecuencia el retraso en el seguimiento de la referencia de corriente se puede reducir a un solo período de modulación. Esto puede ser compensado adoptando una técnica de predicción para la referencia de corriente.
Por consiguiente, el algoritmo de control interpola el valor de la referencia para el período de modulación de corriente a partir de la calculada y las anteriores, y de esta manera, realizando la estimación de la referencia de corriente se consigue que el error de seguimiento en estado estacionario se elimine. De otra parte, la acción diferencial involucrada causa un incremento del error y del sobrepaso máximo en presencia de cambios repentinos de la referencia. En la práctica, sin embargo, resulta que la técnica de predicción de la referencia proporciona un mejoramiento en el desempeño del filtro. Otro interrogante clave en esta clase de técnica de control es el efecto de los filtros de entrada que se usan comúnmente para eliminar las componentes armónicas de alta frecuencia residuales en las corrientes de línea, que son causadas por la modulación del inversor. Estos filtros no se tienen en cuenta en el algoritmo de control y pueden, algunas veces, contaminar la estabilidad del lazo de corriente. Para garantizar la estabilidad del control, un cierto sobredimensionamiento de los componentes reactivos del sistema es necesario.
3.3 Control por Histéresis La implementación básica del controlador de corriente por histéresis permite generar las señales de conmutación a partir de la comparación del error de corriente con una banda de histéresis fija. Aunque es una técnica simple y extremadamente robusta, esta técnica de control exhibe varias características que no son satisfactorias. La principal desventaja es que produce una frecuencia de modulación variante para el convertidor de potencia. Esto generalmente provoca varios problemas, en primer lugar incrementa la dificultad en el diseño de los filtros de entrada y en segundo lugar provoca la generación de resonancias no deseadas sobre la red. Otro aspecto negativo del control por histéresis es que su desempeño es afectado en forma nociva por la interacción de las corrientes de fase que es típica en sistemas trifásicos con neutro aislado.
Se han sugerido muchas mejoras a la estructura de control original para ser implementadas en aplicaciones industriales como el establecimiento de técnicas de desacople de corriente de fase [11] y [12]. En segundo lugar, la frecuencia de modulación se
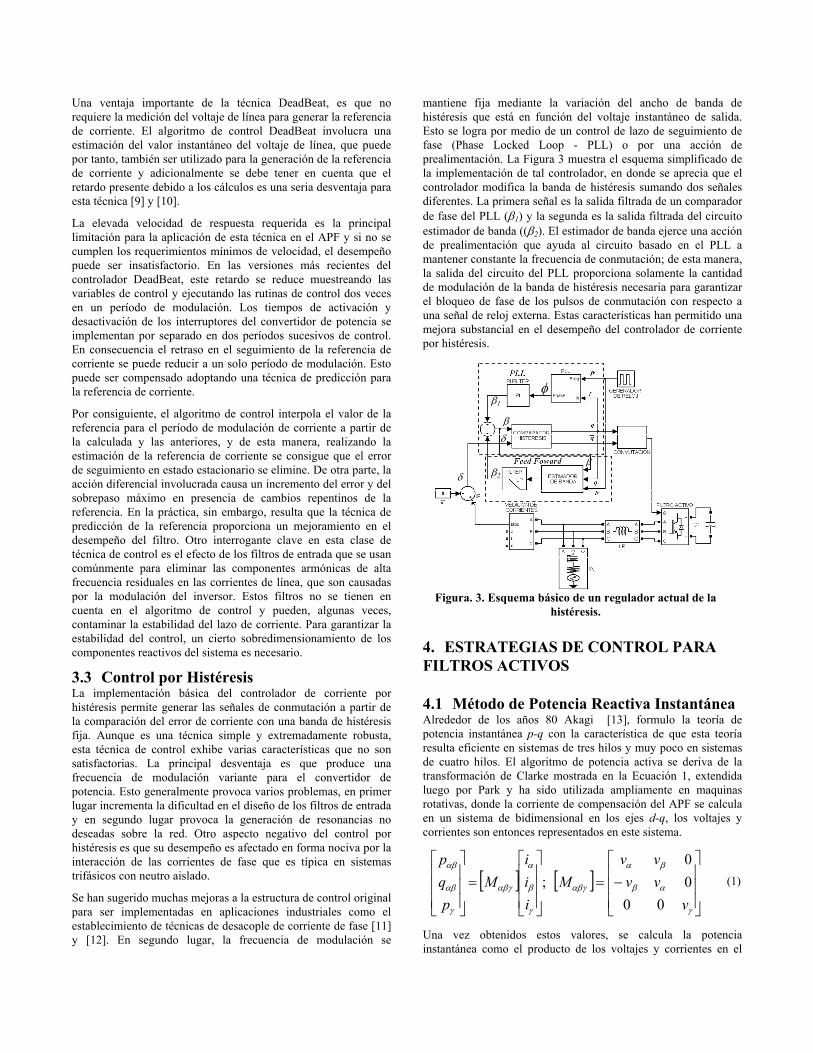
mantiene fija mediante la variación del ancho de banda de histéresis que está en función del voltaje instantáneo de salida. Esto se logra por medio de un control de lazo de seguimiento de fase (Phase Locked Loop - PLL) o por una acción de prealimentación. La Figura 3 muestra el esquema simplificado de la implementación de tal controlador, en donde se aprecia que el controlador modifica la banda de histéresis sumando dos señales diferentes. La primera señal es la salida filtrada de un comparador de fase del PLL (β1) y la segunda es la salida filtrada del circuito estimador de banda ((β2). El estimador de banda ejerce una acción de prealimentación que ayuda al circuito basado en el PLL a mantener constante la frecuencia de conmutación; de esta manera, la salida del circuito del PLL proporciona solamente la cantidad de modulación de la banda de histéresis necesaria para garantizar el bloqueo de fase de los pulsos de conmutación con respecto a una señal de reloj externa. Estas características han permitido una mejora substancial en el desempeño del controlador de corriente por histéresis.
4. ESTRATEGIAS DE CONTROL PARA FILTROS ACTIVOS
4.1 Método de Potencia Reactiva Instantánea Alrededor de los años 80 Akagi [13], formulo la teoría de potencia instantánea p-q con la característica de que esta teoría resulta eficiente en sistemas de tres hilos y muy poco en sistemas de cuatro hilos. El algoritmo de potencia activa se deriva de la transformación de Clarke mostrada en la Ecuación 1, extendida luego por Park y ha sido utilizada ampliamente en maquinas rotativas, donde la corriente de compensación del APF se calcula en un sistema de bidimensional en los ejes d-q, los voltajes y corrientes son entonces representados en este sistema.
[ ] [ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
γ
αβ
βα
αβγ
γ
β
α
αβγ
γ
αβ
αβ
vvvvv
Miii
Mp
qp
0000
; (1)
Una vez obtenidos estos valores, se calcula la potencia instantánea como el producto de los voltajes y corrientes en el
φ
β1
β2
β
β
δ
δ
Figura. 3. Esquema básico de un regulador actual de la histéresis.
nuevo sistema, de donde se obtienen las siguientes definiciones de potencia según [14] y [15].
• Potencia real instantánea • Potencia instantánea de secuencia homopolar. • Potencia activa instantánea que es las suma de las dos anteriores suministrada colectivamente por las tres fases. • Potencia imaginaria instantánea. Es necesario aplicar la transformada inversa de Clarke para obtener las señales de referencia de corriente, y esto se logra invirtiendo la matriz [Mαβγ] de la Ecuación 1. Las señales resultantes se envían como referencia a un convertidor con control de corriente, con las cuales se generan las señales de modulación PWM requeridas para la operación del convertidor.
En el proceso de calculo de esta teoría y en la aplicación de APF se asume un voltaje de alimentación ideal (con muy baja distorsión y balanceado), sin embargo en la mayoría de situaciones se obtienen voltajes que no son propiamente cercanos a los asumidos. Se discute esta condición y se propone un método de solución que consiste en el cálculo de las corrientes de línea y la cantidad de corriente suministrada por el convertidor.
La fase se deriva de los voltajes de línea, y para obtener las corrientes balanceadas bajo condiciones de desbalance en la tensión de entrada, se toma como referencia un solo voltaje de entrada. De esta forma solo falta obtener la amplitud de la corriente. Esta magnitud puede ser fácilmente obtenida por medio de la regulación de voltaje en el bus de DC. Todo esto bajo la premisa de que la potencia real suministrada por la fuente principal es igual a la potencia real demandada por la carga y el resto es compensado por el APF.
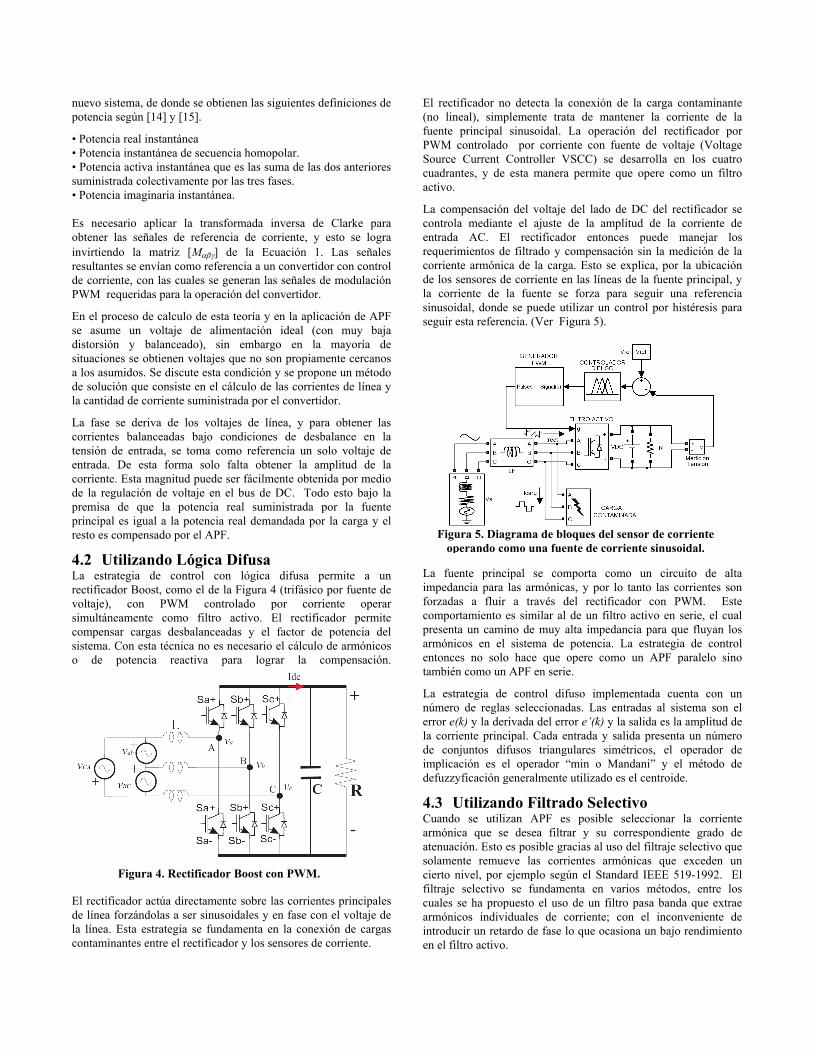
4.2 Utilizando Lógica Difusa La estrategia de control con lógica difusa permite a un rectificador Boost, como el de la Figura 4 (trifásico por fuente de voltaje), con PWM controlado por corriente operar simultáneamente como filtro activo. El rectificador permite compensar cargas desbalanceadas y el factor de potencia del sistema. Con esta técnica no es necesario el cálculo de armónicos o de potencia reactiva para lograr la compensación.
El rectificador actúa directamente sobre las corrientes principales de línea forzándolas a ser sinusoidales y en fase con el voltaje de la línea. Esta estrategia se fundamenta en la conexión de cargas contaminantes entre el rectificador y los sensores de corriente.
El rectificador no detecta la conexión de la carga contaminante (no lineal), simplemente trata de mantener la corriente de la fuente principal sinusoidal. La operación del rectificador por PWM controlado por corriente con fuente de voltaje (Voltage Source Current Controller VSCC) se desarrolla en los cuatro cuadrantes, y de esta manera permite que opere como un filtro activo.
La compensación del voltaje del lado de DC del rectificador se controla mediante el ajuste de la amplitud de la corriente de entrada AC. El rectificador entonces puede manejar los requerimientos de filtrado y compensación sin la medición de la corriente armónica de la carga. Esto se explica, por la ubicación de los sensores de corriente en las líneas de la fuente principal, y la corriente de la fuente se forza para seguir una referencia sinusoidal, donde se puede utilizar un control por histéresis para seguir esta referencia. (Ver Figura 5).
La fuente principal se comporta como un circuito de alta impedancia para las armónicas, y por lo tanto las corrientes son forzadas a fluir a través del rectificador con PWM. Este comportamiento es similar al de un filtro activo en serie, el cual presenta un camino de muy alta impedancia para que fluyan los armónicos en el sistema de potencia. La estrategia de control entonces no solo hace que opere como un APF paralelo sino también como un APF en serie.
La estrategia de control difuso implementada cuenta con un número de reglas seleccionadas. Las entradas al sistema son el error e(k) y la derivada del error e’(k) y la salida es la amplitud de la corriente principal. Cada entrada y salida presenta un número de conjuntos difusos triangulares simétricos, el operador de implicación es el operador “min o Mandani” y el método de defuzzyficación generalmente utilizado es el centroide.
4.3 Utilizando Filtrado Selectivo Cuando se utilizan APF es posible seleccionar la corriente armónica que se desea filtrar y su correspondiente grado de atenuación. Esto es posible gracias al uso del filtraje selectivo que solamente remueve las corrientes armónicas que exceden un cierto nivel, por ejemplo según el Standard IEEE 519-1992. El filtraje selectivo se fundamenta en varios métodos, entre los cuales se ha propuesto el uso de un filtro pasa banda que extrae armónicos individuales de corriente; con el inconveniente de introducir un retardo de fase lo que ocasiona un bajo rendimiento en el filtro activo.
Figura 5. Diagrama de bloques del sensor de corriente operando como una fuente de corriente sinusoidal.
Figura 4. Rectificador Boost con PWM.

Una mejor solución es la utilización de series de Fourier para determinar los armónicos individuales. Otra solución propuesta es utilizar un sistema de coordenadas rotativo sincrónico para cada uno de los armónicos de corriente. Según J. Svensson [16] se establecen diferentes métodos para realizar la compensación selectiva tales como el método directo (con y sin retardo), y los métodos de filtrado selectivo (Método de Fourier F-method y Método de la transformada T-method).
En el método directo de filtrado activo solamente se consideran importantes las componentes instantáneas distorsionadas, activas y reactivas de la carga. Se utiliza la transformación d-q como se explico con anterioridad en la Ecuación 1. El método con retardo básicamente utiliza un ajuste en tiempo de cálculo de las corrientes de compensación del APF.
El filtrado selectivo se basa en la cancelación individual de los armónicos de corriente. Es el método más efectivo de compensación de fase, donde se adiciona un retardo total a cada armónico. El retardo total es sumado a la rotación de cada armónico, también es sumado al sistema de coordenadas d-q. Donde el cambio de fase del enésimo armónico se muestra e la Ecuación 2:
⎩⎨⎧
=−=−−=+=−
=ΔL
L
,3,2,1;16,2)1(,3,2,1;16,2)1(
)( mmnTnmmnTn
sg
sgnL ω
ωφ (2)
En la Figura 6 se muestra de forma esquemática el cambio de fase total para el armónico de quinto y séptimo orden respectivamente.
El F-method utiliza una ventana deslizante para calcular la transformada de Fourier. El cambio de fase total causado por el retraso en el tiempo es adicionado a las fases de los armónicos individuales, seguidamente se realiza la transformación de la amplitud y fase al sistema de coordenadas αβ, y después de realizar esta transformación en la cual aparecen secuencias positivas y negativas, se transforma del sistema αβ al sistema de coordenadas d-q.
En el T-method se utiliza un filtro pasa bajo (FPB) en la señal trifásica simétrica en diferentes marcos rotativos para diferentes armónicas. La amplitud de la enésima armónica se obtiene utilizando el FPB en el sistema coordenado dq(n) (rotando a n veces de la frecuencia fundamental).
El tiempo de retardo es eliminado con la adición del cambio de fase cuando se transforma de sistema de coordenadas dq(n) al sistema de coordenadas d-q.
5. SISTEMA SIMULADO Se seleccionaron dos sistemas no lineales típicos para evaluar el funcionamiento de los controladores de corriente, un rectificador trifásico y un rectificador trifásico controlado por tiristores con carga resistiva, cuyos parámetros se señalan en la Tabla 1.
Tabla 1. Rangos De Los Sistemas Prototipo Simulados
Parámetro Rectificador Trifásico
Rectificador Trifásico
Controlado Tensión de Entrada VS = 380 VRMS VS = 380 VRMS Potencia en la Carga Pn = 100 kW Pn = 100 kWFrecuencia de operación F = 60 Hz F = 60 Hz
Periodo de Muestreo Ts = 2 μs Ts = 2 μs
Angulo de Disparo α = 0 º α = 30º Inductor de la carga. L = 0 H L = 0 H Inductor de entrada. LR = 100 mH LR = 100 mH Inductor de inyección de corriente del APF LF =1000 mH LF =1000 mH
Condensador del APF C = 4700 mf C = 100 mf
La Figura 7 muestra el esquema de la planta considerada, como se observa, estos sistemas son compensados por un APF paralelo. En el rango de media potencia, como las cargas consideradas aquí, la compensación de la potencia reactiva de la carga se realiza cada vez más por filtros activos, sin la necesidad de filtros de compensación pasiva [17].
Esto se justifica principalmente por la disminución en el costo de los semiconductores de potencia (y de los condensadores electrolíticos). El APF es implementado por medio de un VSI trifásico. El control de corriente del filtro opera los interruptores para generar una corriente deseada iF. La corriente de referencia i*
F se obtiene restando la corriente de la carga iLR de la corriente de referencia de la línea i*
S, que representa la corriente deseada después de la compensación para alcanzar la operación requerida.
La señal i*S se obtiene multiplicando la forma de onda del voltaje
de entrada VS y un factor de escala apropiado. Para limitar la pendiente máxima de la corriente de la carga iLR dentro de la
Figura 7. Esquema del sistema simulado.
5ωg
β
ωg
qk+2
qk dk+2
dk
i(5)(dq)(k)
i(5)(dq)(k+2)
α ΔφL(5)
7ωg
β
ωg
qk+2
qk dk+2 dk
i(7)(dq)(k+2
i(7)(dq)(k)
α ΔφL(7)
Figura 6. Desplazamiento de fase total debido retraso para 5 y 7 armónico.
capacidad de compensación del filtro activo, un inductor LR se ubica antes del rectificador.
El apropiado dimensionamiento de LR, considera los parámetros del filtro (LF, E) para evitar la saturación del inversor, en correspondencia de las conmutaciones del rectificador. Puesto que el error de compensación depende fuertemente de la corriente derivada de las conmutaciones de los tiristores del rectificador, se consideran dos ángulos de disparo (α = 0º y α = 30º), correspondientes a una variación de corriente lenta y abrupta, respectivamente.
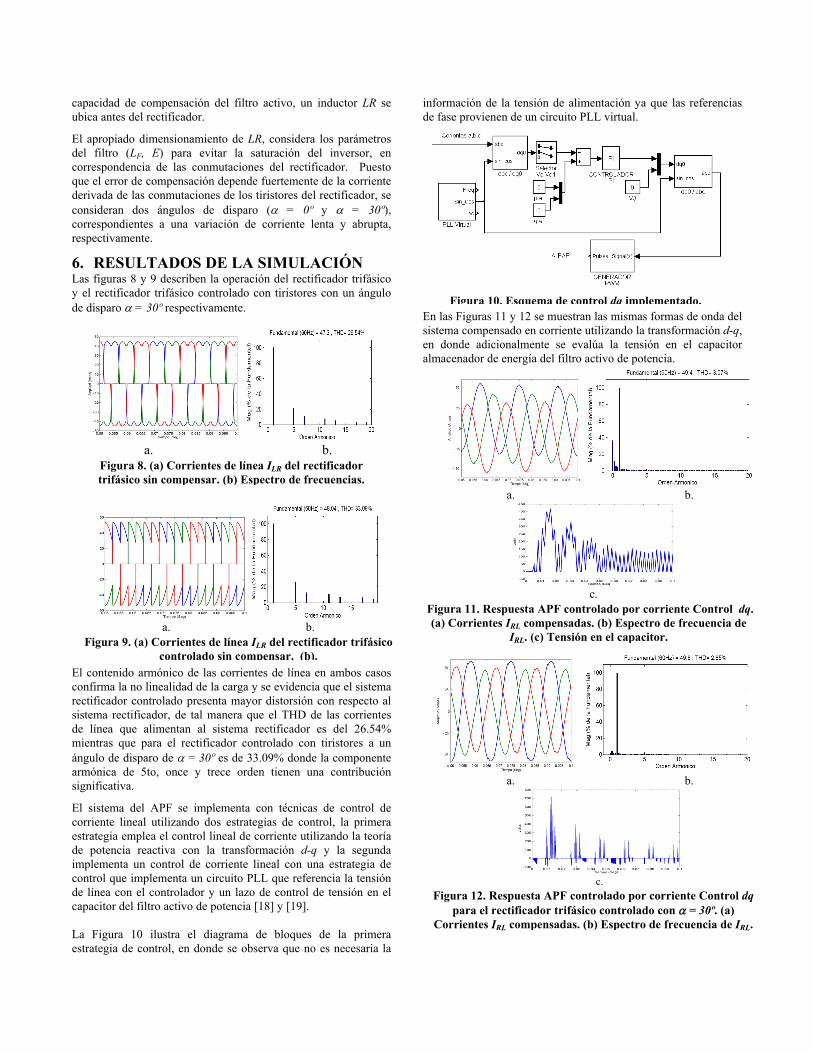
6. RESULTADOS DE LA SIMULACIÓN Las figuras 8 y 9 describen la operación del rectificador trifásico y el rectificador trifásico controlado con tiristores con un ángulo de disparo α = 30º respectivamente.
El contenido armónico de las corrientes de línea en ambos casos confirma la no linealidad de la carga y se evidencia que el sistema rectificador controlado presenta mayor distorsión con respecto al sistema rectificador, de tal manera que el THD de las corrientes de línea que alimentan al sistema rectificador es del 26.54% mientras que para el rectificador controlado con tiristores a un ángulo de disparo de α = 30º es de 33.09% donde la componente armónica de 5to, once y trece orden tienen una contribución significativa.
El sistema del APF se implementa con técnicas de control de corriente lineal utilizando dos estrategias de control, la primera estrategia emplea el control lineal de corriente utilizando la teoría de potencia reactiva con la transformación d-q y la segunda implementa un control de corriente lineal con una estrategia de control que implementa un circuito PLL que referencia la tensión de línea con el controlador y un lazo de control de tensión en el capacitor del filtro activo de potencia [18] y [19]. La Figura 10 ilustra el diagrama de bloques de la primera estrategia de control, en donde se observa que no es necesaria la
información de la tensión de alimentación ya que las referencias de fase provienen de un circuito PLL virtual.
En las Figuras 11 y 12 se muestran las mismas formas de onda del sistema compensado en corriente utilizando la transformación d-q, en donde adicionalmente se evalúa la tensión en el capacitor almacenador de energía del filtro activo de potencia.
a. b.
c.
Figura 12. Respuesta APF controlado por corriente Control dq para el rectificador trifásico controlado con α = 30º. (a)
Corrientes IRL compensadas. (b) Espectro de frecuencia de IRL.
a. b.
c.
Figura 11. Respuesta APF controlado por corriente Control dq. (a) Corrientes IRL compensadas. (b) Espectro de frecuencia de
IRL. (c) Tensión en el capacitor.
a. b.
Figura 9. (a) Corrientes de línea ILR del rectificador trifásico controlado sin compensar. (b).
a. b.
Figura 8. (a) Corrientes de línea ILR del rectificador trifásico sin compensar. (b) Espectro de frecuencias.
Figura 10. Esquema de control dq implementado.
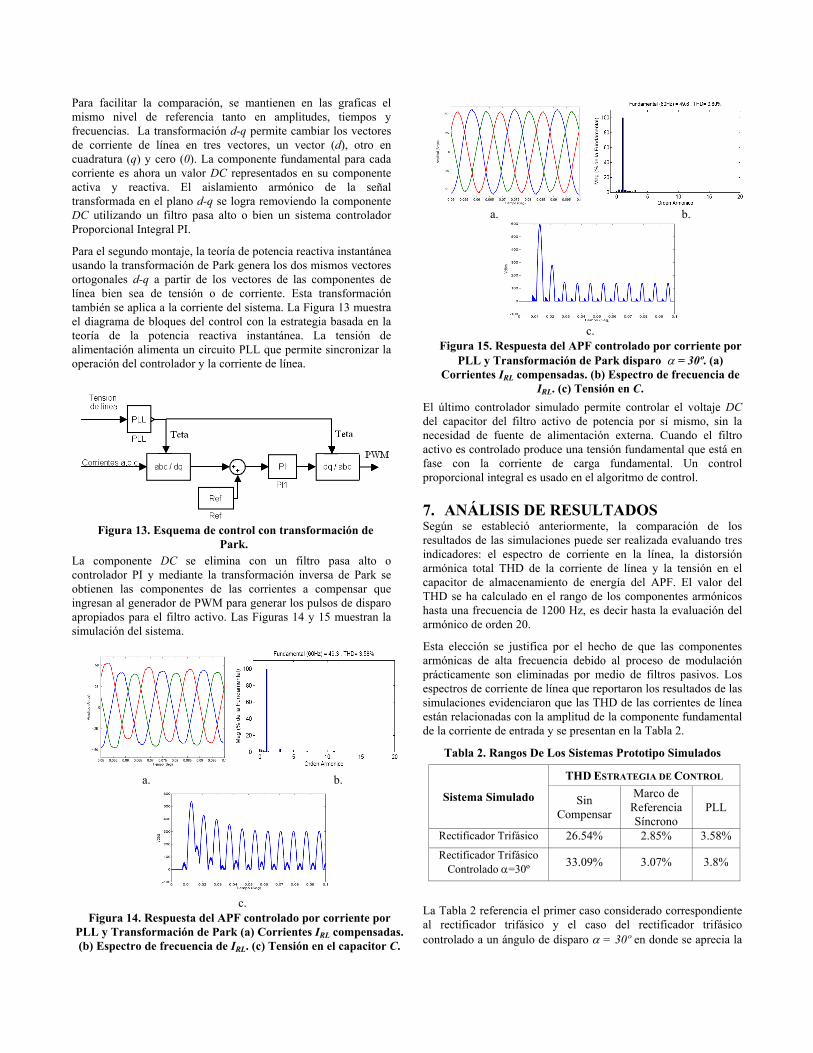
Para facilitar la comparación, se mantienen en las graficas el mismo nivel de referencia tanto en amplitudes, tiempos y frecuencias. La transformación d-q permite cambiar los vectores de corriente de línea en tres vectores, un vector (d), otro en cuadratura (q) y cero (0). La componente fundamental para cada corriente es ahora un valor DC representados en su componente activa y reactiva. El aislamiento armónico de la señal transformada en el plano d-q se logra removiendo la componente DC utilizando un filtro pasa alto o bien un sistema controlador Proporcional Integral PI.
Para el segundo montaje, la teoría de potencia reactiva instantánea usando la transformación de Park genera los dos mismos vectores ortogonales d-q a partir de los vectores de las componentes de línea bien sea de tensión o de corriente. Esta transformación también se aplica a la corriente del sistema. La Figura 13 muestra el diagrama de bloques del control con la estrategia basada en la teoría de la potencia reactiva instantánea. La tensión de alimentación alimenta un circuito PLL que permite sincronizar la operación del controlador y la corriente de línea.
La componente DC se elimina con un filtro pasa alto o controlador PI y mediante la transformación inversa de Park se obtienen las componentes de las corrientes a compensar que ingresan al generador de PWM para generar los pulsos de disparo apropiados para el filtro activo. Las Figuras 14 y 15 muestran la simulación del sistema.
El último controlador simulado permite controlar el voltaje DC del capacitor del filtro activo de potencia por sí mismo, sin la necesidad de fuente de alimentación externa. Cuando el filtro activo es controlado produce una tensión fundamental que está en fase con la corriente de carga fundamental. Un control proporcional integral es usado en el algoritmo de control.
7. ANÁLISIS DE RESULTADOS Según se estableció anteriormente, la comparación de los resultados de las simulaciones puede ser realizada evaluando tres indicadores: el espectro de corriente en la línea, la distorsión armónica total THD de la corriente de línea y la tensión en el capacitor de almacenamiento de energía del APF. El valor del THD se ha calculado en el rango de los componentes armónicos hasta una frecuencia de 1200 Hz, es decir hasta la evaluación del armónico de orden 20.
Esta elección se justifica por el hecho de que las componentes armónicas de alta frecuencia debido al proceso de modulación prácticamente son eliminadas por medio de filtros pasivos. Los espectros de corriente de línea que reportaron los resultados de las simulaciones evidenciaron que las THD de las corrientes de línea están relacionadas con la amplitud de la componente fundamental de la corriente de entrada y se presentan en la Tabla 2.
Tabla 2. Rangos De Los Sistemas Prototipo Simulados
Sistema Simulado
THD ESTRATEGIA DE CONTROL
Sin Compensar
Marco de Referencia Síncrono
PLL
Rectificador Trifásico 26.54% 2.85% 3.58% Rectificador Trifásico
Controlado α=30º 33.09% 3.07% 3.8%
La Tabla 2 referencia el primer caso considerado correspondiente al rectificador trifásico y el caso del rectificador trifásico controlado a un ángulo de disparo α = 30º en donde se aprecia la
a. b.
c.
Figura 15. Respuesta del APF controlado por corriente por PLL y Transformación de Park disparo α = 30º. (a)
Corrientes IRL compensadas. (b) Espectro de frecuencia de IRL. (c) Tensión en C.
a. b.
c.
Figura 14. Respuesta del APF controlado por corriente por PLL y Transformación de Park (a) Corrientes IRL compensadas. (b) Espectro de frecuencia de IRL. (c) Tensión en el capacitor C.
Figura 13. Esquema de control con transformación de Park.

reducción de componentes armónicos en el sistema independientemente de la estrategias de compensación evaluada.
El sistema rectificador trifásico presenta una THD = 26.54% y el sistema rectificador trifásico controlado una THD = 33.09%. La estrategia de control con marco de referencia síncrono, presenta una significativa superioridad en cuanto a la disminución de la distorsión armónica total de corriente (THD = 2.85 y THD = 3.07 respectivamente) con respecto a la estrategia de control que trabaja con el PLL y la transformación de Park. Los espectros de frecuencia para la compensación por marco de referencia síncrono, de hecho, tienen una componente DC mucho mayor que los espectros del compensador con PLL y transformación de Park, y esa característica se ve reflejada en el desbalance en amplitud de las formas de onda de corriente de línea presentes de las Figuras. 14(a) y 15(a) respectivamente.
Esta superioridad no es fácilmente evidenciada en los datos reportados en la Tabla 2, pero si adicionalmente se evalúa la tensión presente en el capacitor almacenador de energía del APF se aprecia la bondad en cuanto la carga y descarga del mismo en una manera menos abrupta y controlada.
Es también posible notar que el funcionamiento de los controladores lineales resultan ser similares con las dos estrategias de compensación y la reducción de componentes armónicos es apreciable en los dos casos. Como se puede observar, el controlador lineal también exhibe cierta degradación en su desempeño cuando el rectificador trifásico es controlado e inclusive cuando se presentan aumentos en el ángulo de disparo de los tiristores. Para este controlador, según lo expuesto anteriormente, la limitación principal es el ancho de banda. En este caso, la ancho de banda esta cercano a 1.2 KHz que es suficiente para la aplicación.
8. CONCLUSIONES Aunque se presentan varias técnicas de control, se considera que la técnica mas utilizada es la de potencia activa instantánea, siendo también la mas estudiada y mejorada. En la actualidad varios autores han propuesto modificaciones a esta teoría, lo que la hacen viable y aplicable a nuevos problemas de calidad de potencia.
Este documento ha discutido la diferencia del desempeño dinámico de tres técnicas de control de corriente más populares para las aplicaciones con APF. Todas las técnicas, control por histéresis, control deadbeat, y control lineal fueron consideradas, presentando las más recientes mejoras en su implementación para su aplicación industrial.
Se evaluó el comportamiento de dos estrategias de control de corriente lineal utilizando un marco de referencia síncrono y mediante la utilización de un circuito PLL y la transformada de Park, en donde se analizo el desempeño del APF teniendo en cuenta índices de desempeño como la THD y su espectro frecuencial.
De lo anteriormente expuesto, según los estándares de la IEC, el desempeño de los controladores lineales de corriente es más apropiado utilizando la primera estrategia de compensación que la segunda, debido a que las corrientes tienen un desbalance menor gracias al empleo del PLL que sincroniza la operación del controlador con la tensión presente en la línea de alimentación.
9. REFERENCIAS [1] V. Stefanovic and R. Nelms, “Microprocessor control of
motor drives and power converters,” in Tutorial Course Rec., IEEE-IAS Annu. Meeting, Dearborn, MI, Oct. 1991.
[2] D. Wuest and F. Jenni, “Space vector based current control schemes for voltage source inverters,” in Conf. Rec. IEEE PESC’93, Seattle, WA, 1993.
[3] H. Van der Broeck, H. Skudelny, and G. Stanke, “Analysis and realization of pulse width modulator based on voltage space vectors,” IEEE Trans. Ind. Applicat., pp. 142–, 1988.
[4] D. Brod and D. Novotny, “Current control of VSI-PWM inverters,” IEEE Trans. Ind. Applicat., pp. 562–570, 1985.
[5] P. Kazmierkowski and M. Dzieniakowski, “Review of current regulation techniques for three-phase PWM inverters,” in Proc. IEEE IECON’94, pp. 567–575, 1994.
[6] H. Akagi, “New Trends in Active Filters for Power Conditioning ” IEEE Trans . Ind. Applicat., vol. 32, pp. 1312–1323, Nov. 1996.
[7] T. Rowan and R. Kerkman, “A new synchronous current regulator and an analysis of current regulated PWM inverters,” IEEE Trans. Ind. Applicat., pp. 678–690, 1986.
[8] C. Rim, N. Choi, G. Cho, and H. Cho, “A complete DC and AC analysis of three-phase controlled-current PWM rectifier using circuit D-Q transformation,” IEEE Trans. Power Electron., vol. 9, pp. 390–396, 1994.
[9] K. Gokhale, A. Kawamura, and R. Hoft, “Dead beat microprocessor control of PWM inverter for sinusoidal output waveform synthesis,” IEEE Trans. Ind. Applicat., vol. IA-23, pp. 901–909, Sept./Oct. 1987.
[10] T. Kawabata, T. Miyashita, and Y. Yamamoto, “Dead beat control of three phase PWM inverter,” IEEE Trans. Power Electron., vol. 5, pp. 21–28, Jan. 1990.
[11] P. Tenti, A. Zuccato, L. Rossetto, and M. Bortolotto, “Optimum digital control of PWM rectifiers,” in Proc. IEEE IECON’94, 1994, pp. 382–387.
[12] S. Buso, L. Malesani, P. Mattavelli, and R. Veronese, “Design and fully digital control of parallel active filters for thyristor rectifiers,” in Conf. Rec. IEEE-IAS Annu. Meeting, 1997, pp. 1360–1367.
[13] H. Akagi, Y. Kanazawa, and M. Nomura, “Generalized theory of the instantaneous reactive power in three-phase circuits,” in In Proc. 1983 Int. Tokyo, Japan: Power Electronics Conf., 1983, pp. 1375—1386.
[14] H. Akagi and A. Nabae, “Control strategy of active power filters using multiple voltage source PWM converters,” IEEE Trans. Ind. Applicat., vol. IA-22, pp. 460–465, May 1986.
[15] J. Dixon, M. Contardo, and L. Morán, “A fuzzy-controller active front-end rectifier whit current harmonic filtering characteristics and minimum sensing variables,” IEEE Trans. Power Electron., vol. 14, 4, pp. 724-729, 1999.
[16] J. Svensson and R. Ottersten, “Shunt active filter of vector current controller (VSC) at a moderate switching frequency,” IEEE Trans. Ind. Applicat., vol. 35, no. 5, pp. 1083—1090, Sep/Oct 1999.