control system lab experiments using compose (vtu ... control system lab experiments using compose...
TRANSCRIPT

1
Control System lab Experiments using Compose
(VTU University Syllabus)
Author: Sijo George
Reviewer: Sreeram Mohan
Altair Engineering, Bangalore
Version: 1
Date: 09/11/2016

2
CONTENTS
EXP. 1: STEP RESPONSE OF A SECOND ORDER SYSTEM ............................................................................. 3
EXP.1.B STEP RESPONSE OF A SECOND ORDER SYSTEM FOR VARIOUS VALUES OF ZETA ...................... 15
EXP.2 EFFECT OF P, PD, PI AND PID CONTROLLER ..................................................................................... 17
EXP.3 ROOT LOCUS, BODE AND NYQUIST PLOT ........................................................................................ 21
EXP.4 RELATION BETWEEN FREQUENCY RESPONSE AND TRANSIENT RESPONSE ................................... 29
TABLE OF FIGURES
FIGURE 1.a: STEP RESPONSE AND ADDITION OF ZERO TO THE GIVEN SYSTEM ................................. 144
FIGURE 1.b: STEP RESPONSE FOR DIFFERENT DAMPING RATIO OF A SECOND ORDER SYSTEM .......... 166
FIGURE 2.a: EFFECT P, PD, PI AND PID CONTROLLERS ........................................................................ 20
FIGURE 3.a: ROOT LOCUS AND EFFECT OF ADDING POLES AND
ZEROS………………………………………………165 FIGURE 3.b: BODE PLOT OF THE GIVEN
SYSTEM……………………………………………..………………………………...167 FIGURE 3.c: NYQUIST PLOT OF THE
GIVEN SYSTEM………………………………………..………………………………….28 FIGURE 4.a: BODE PLOT FOR
TRANSIENT AND FREQUENCY RESPONSE………………………………..…………….31 FIGURE 4.b: RESONANT
PEAK, MAX.OVERSHOOT AND DAMPING RATIO..……………………..…………………32 FIGURE 4.c:
BANDWIDTH AND DAMPING RATIO….…………………………………………………………..……………….32

3
EXP. 1: STEP RESPONSE OF A SECOND ORDER SYSTEM
Aim & Description:
(1)To determine the step response of a second order system and evaluation of time domain
specifications.
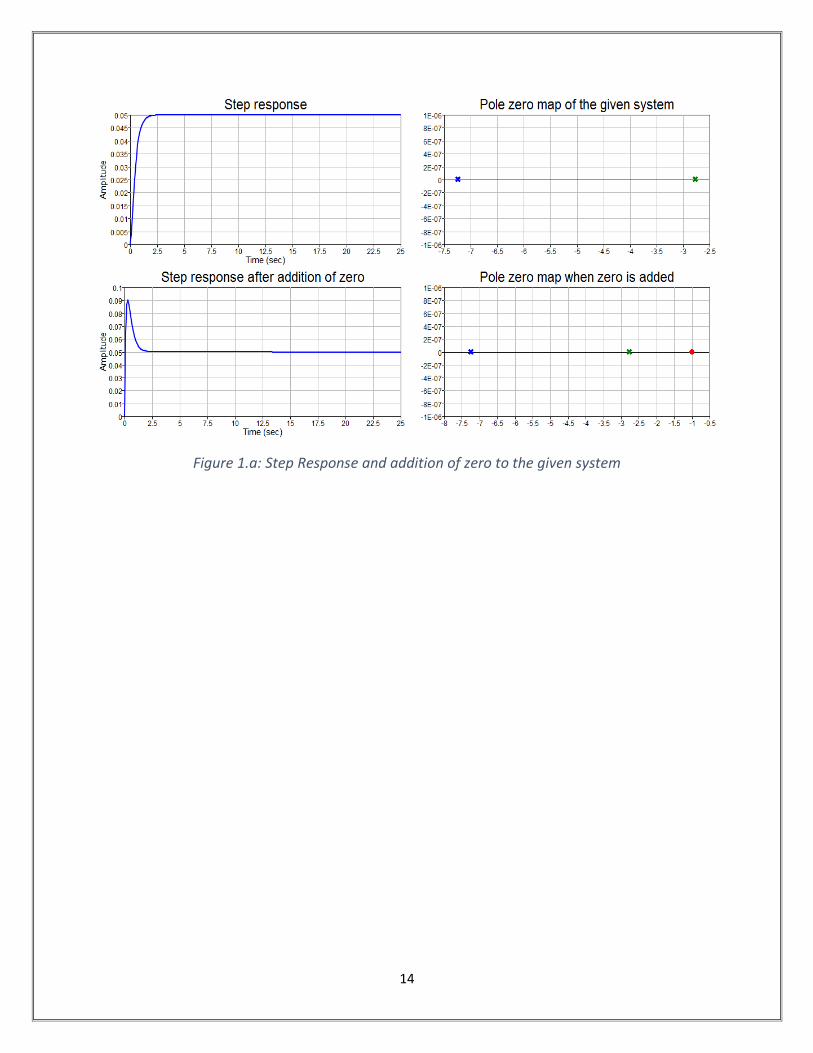
(2) To evaluate the effect of additional zeros on time response of second order system.
Step response is the time behavior of the outputs of a general system when its inputs change
from zero to one in a very short time.
2010
1)(
3
sssG
Software code:
clc; clear; close all;
sys.num = [1]; % Numerator
sys.den = [1 10 20]; % Denominator
sys1=tf(sys); % Finding transfer function
kp=dcgain(sys) % gain when frequency is zero(s=0)
ess=1/(1+kp) % Steady state error
w = sqrt (sys.den(3)) % Finding natural frequency
zeta = sys.den(2) / (2*w) % Damping ratio
TD=(1+0.7*zeta)/w % Delay time
TS = 4/ (zeta*w) % Settling time
TP = pi/ (w*sqrt(1-zeta^2)) % Peak Time
TR=(pi-atan((sqrt(1-zeta^2))/zeta))/(w*sqrt(1-zeta^2)) % Rise Time
Percentovershoot= exp(-zeta*pi/ sqrt(1-zeta^2))*100 % Overshoot
subplot(2,2,1)
[z,t]=step(sys); % Step response
plot(t,z);
title('Step response');
xlabel('Time (sec)');
4
ylabel('Amplitude');grid on;
subplot(2,2,2)
pzmap(sys.num,sys.den); % Pole zero plot
title('Pole zero map of the given system')
grid on;
%% Adding Zero to the given system
sys.num = conv(sys.num,[1 1]);
sys2=tf(sys)
[f,t]=step(sys);
subplot(2,2,3)
plot(t,f);
title('Step response after addition of zero')
xlabel('Time (sec)');
ylabel('Amplitude');grid on;
subplot(2,2,4)
pzmap(sys.num,sys.den) % Pole zero plot when zero is added
title('Pole zero map when zero is added')
grid on;
%----------------------Function created to display transfer function using string concept
function [sys]=tf(varargin)
if length(varargin)==1
sys=varargin{1};
b=sys.num;
a=sys.den;
end
if length(varargin)==2
b=varargin{1};
a=varargin{2};
end

5
[fopen_fileID] = fopen('testfile.txt', 'w'); %open a text file
l=length(b); % Number of numerator coefficients
m=length(a); % Number of denominator coefficients
%%%%-----------Numerator
if length(b)==1 % Check the numerator has only one coefficient
fprintf(fopen_fileID, ' %g\n',b(1)); % Print numerator
fprintf(fopen_fileID,' %s','-----------'); % to draw the separation b/w numerator and denominator
end
if length(b)==2 % Check the numerator has two coefficients
c{1}=sprintf('%g%s',b(1),'s'); % store first numerator coefficient in a cell 'c{1}'
c{2}=b(end); % store second numerator coefficient in a cell 'c{2}'
fprintf(fopen_fileID, '%s',c{1}); % print numerator
if b(end)>0
fprintf(fopen_fileID, '%s','+'); % to print + sign before the last coefficient if it is positive
end
fprintf(fopen_fileID, '%g\n',c{end});
fprintf(fopen_fileID,' %s','-----------'); % to draw the separation b/w numerator and denominator
end
if length(b)>2 % Check the numerator has more than two coefficients
i=l-1; % Initializing value of i to print the exponential term
for k=1:l-2 % Loop defined for the numerator coefficients excluding the last and second last
coefficient
h=sprintf('%g%s%g',b(k),'s^',i); % Print numerator coefficient and storing to the variable 'h'
c{k}=h; %store the numerator coefficient in a cell 'c'
i=i-1; % Decrementing the power of i for printing the exponential terms in the correct way
end
c{k+1}=sprintf('%g%s',b(k+1),'s'); % store the second last coefficient in 'c'
c{k+2}=b(end); % store last coefficient in 'c'
c;

6
for t=1:length(c)-1
fprintf(fopen_fileID, '%s',c{t}); % Print the numerator coefficients except the last coefficient of the
transfer function
R=cell2mat(c(t+1));
T=strcmp(R(1),'-'); %returns 1 if the comparison matches
if (t~=(length(c)-1))
if T==0
fprintf(fopen_fileID, '%s','+'); %to print + sign if the next coefficient is positive except the last digit
end
end
end
if b(end)>0
fprintf(fopen_fileID, '%s','+'); %To print + sign before it when the last coefficient is positive
end
fprintf(fopen_fileID,'%g\n',c{end}); % Print the last numerator coefficient of the transfer function
fprintf(fopen_fileID,' %s','-----------');
end
%------------Denominator
if length(a)==1 % Check if the denominator has only one coefficient
fprintf(fopen_fileID, '\n %g\n',a(1));
end
if length(a)==2 % Check if the denominator has two coefficients
f{1}=sprintf('\n %g%s',a(1),'s');
f{2}=a(end);
fprintf(fopen_fileID, '%s',f{1}); % print denominator
if a(end)>0
fprintf(fopen_fileID, '%s','+'); %to print + sign before the last coefficient it is positive
end
fprintf(fopen_fileID, '%g\n',f{end}); %print the last coefficient
7
end
if length(a)>2 %Check if the length of denominator has more than 2 coefficients
j=m-1;
for g=1:m-2
e=sprintf('%g%s%g',a(g),'s^',j); % storing ‘s’ terms and its coefficient power in a variable
f{g}=e; %assigning to a cell
j=j-1;
end
f{g+1}=sprintf('%g%s',a(g+1),'s');
f{g+2}=a(end);
fprintf(fopen_fileID, '\n %s',f{1}); %to print the first coefficient of denominator along with the ‘s’
term
R2=cell2mat(f(2));
T2=strcmp(R2(1),'-'); %returns 1 if the comparison matches
if T2==0
fprintf(fopen_fileID, '%s','+'); %To print + sign before second term if it is a positive
end
for u=2:length(f)-1
fprintf(fopen_fileID, '%s',f{u}); % to print the coefficients from second to last
R1=cell2mat(f(u+1)); %converting cell to matrix
T1=strcmp(R1(1),'-'); % gives 1 as output if the comparison matches
if (u~=(length(f)-1))
if T1==0
fprintf(fopen_fileID, '%s','+'); %to print the + sign if the next coefficient is positive
end
end
end
if a(end)>0
fprintf(fopen_fileID, '%s','+'); %to print + sign if the last coefficient is positive
8
end
end
fprintf(fopen_fileID, '%g\n',f{end}); %to print the last coefficient
fclose(fopen_fileID);
content = type('testfile.txt');
sys=content{1,1} ;
end
%------------Function for finding step response
function [z,t]= step(varargin)
if length(varargin)==1 % Check whether the input variable is of length 1
sys=varargin{1}; % store the incoming structure to variable ‘sys’
num=sys.num; % store numerator coefficients in variable ‘num’
den=sys.den; % store denominator coefficients in variable ‘den’
t=0:0.1:25; % Plotting time length
end
if length(varargin)==2 % Check whether the input variable is of length 1
num=varargin{1}; % store the numerator to variable ‘num’
den=varargin{2}; % store the numerator to variable ‘num’
t=0:0.1:25; % Plotting time length
end
if length(varargin)==3
num=varargin{1};
den=varargin{2};
t=varargin{3}; % User defined time length
end
[A,B,C,D]=tf2ss(sys.num,sys.den); % Finding State space matrices
f=length(A); %Size of the A matrix
U=1; % Step input
9
K=[1]; % Weighting factor
for i=1:length(t)
h{i}=C*(A^-1)*(e^(A*t(i))-eye(f))*B*K +D*K*U; % finding step response values
end
z=cell2mat(h); % Conversion of cell to matrix
end
%------------Function for finding pole zero map
function pzmap(varargin)
if length(varargin)==1
sys=varargin{1}; % assigning structure to variable ‘sys’
num=sys.num; %Numerator
den=sys.den; % Denominator
end
if length(varargin)==2
num=varargin{1}; % Numerator
den=varargin{2}; % Denominator
end
z=roots(num); % Finding zeros
p=roots(den); % Finding poles
%%% …………….For Plotting poles
for i=1:length(p)
R=isreal(p(i)); % Check whether the poles are real or not
switch (R)
case 1 % case when Poles are real
p1=[p(i),0]; % Defining first point for plotting poles
p2=[p(i),0]; % Defining second point for plotting poles
theta = atan2( p2(2) - p1(2), p2(1) - p1(1)); % Finding slope
r = sqrt( (p2(1) - p1(1))^2 + (p2(2) - p1(2))^2); % Finding the length between the first and second point
line = 0:0.01: r;
10
x = p1(1) + line*cos(theta); % set of x coordinates to plot
y = p1(2) + line*sin(theta); % set of y coordinates to plot
plot(x,y,'x'); % Plotting poles
hold on;
case 0 % Case when poles are imaginary.
p1=[real(p(i)),imag(p(i))];
p2=[real(p(i)),imag(p(i))]; % Since both points(p1 &p2) are equal, it plots only the specified point
theta = atan2( p2(2) - p1(2), p2(1) - p1(1));
r = sqrt( (p2(1) - p1(1))^2 + (p2(2) - p1(2))^2);
line = 0:0.01: r;
x = p1(1) + line*cos(theta);
y = p1(2) + line*sin(theta);
plot(x,y,'x');
hold on;
end
end
%%%%-----------------Zeros
for i=1:length(z)
S=isreal(z(i)) % Check whether the zeros are real or not
switch (S)
case 1 % case when Poles are real
q1=[z(i),0];
q2=[z(i),0];
theta = atan2( q2(2) - q1(2), q2(1) - q1(1));
r = sqrt( (q2(1) - q1(1))^2 + (q2(2) - q1(2))^2);
line = 0:0.01: r;
a = q1(1) + line*cos(theta);
b = q1(2) + line*sin(theta);
plot(a,b,'o');
11
hold on;
case 0 % Case when zeros are imaginary.
q1=[real(z(i)),imag(z(i))];
q2=[real(z(i)),imag(z(i))];
theta = atan2( q2(2) - q1(2), q2(1) - q1(1));
r = sqrt( (q2(1) - q1(1))^2 + (q2(2) - q1(2))^2);
line = 0:0.01: r;
a = q1(1) + line*cos(theta);
b = q1(2) + line*sin(theta);
plot(a,b,'o'); % plotting zeros
hold on;
end
end
end
%----------Function for finding DC gain
function kp=dcgain(varargin)
if length(varargin)==1 % Check whether the incoming variable has length 1
sys=varargin{1}; % Assigning the incoming structure to ‘sys’
num=sys.num; % Numerator
den=sys.den; % Denominator
end
if length(varargin)==2 % Check whether the incoming variable has length 1
num=varargin{1}; % Numerator
den=varargin{2}; % Denominator
end
kp=num(end)/den(end); % DC gain
end
12
%Function for finding state space matrices in controllable canonical form from transfer function
function[A,B,C,D]=tf2ss(b,a)
d=length(a); %Length of denominator
if a(1)~=1 %to make first coefficient of denominator equal to 1
a=a/a(1);
end
m=d-1;
%%%%%%%%----A MATRIX
for j=1:m
A(m,j)=-a(d);
d=d-1;
end
for k=m:-1:2
A(k-1,k)=1;
end
B(m,1)=1; %B MATRIX
%%%%%%%-----C MATRIX
g=abs(length(a)-length(b));
if length(a)>length(b)
for i=length(b):-1:1
b(i+g)=b(i);
end
for l=1:g
b(l)=0;
end
end
if length(b)>length(a)
for i=length(a):-1:1
a(i+g)=a(i);
13
end
for l=1:g
a(l)=0;
end
end
b
f=m;
for p=2:1:m+1
C(1,f)=b(p)-a(p)*b(1);
f=f-1;
end
D=b(1); %D MATRIX
end
Simulation Results:
sys1 = 1 --------------
1s^2+10s+20
sys2 = 1s+1 ------------- 1s^2+10s+20
kp = 0.05 ( DC gain) ess = 0.952380952 ( Steady state error) w = 4.47213595 (Natural frequency) zeta = 1.11803399 (Damping ratio) TD = 0.398606798 (Delay time) TS = 0.8 (Settling Time) TP = 0 - 1.40496295i (Peak Time) TR = -0.21520447 - 1.40496295i (Rise Time) Percent overshoot = 73.7368878 + 67.5490294i (Percent Overshoot)
14
Figure 1.a: Step Response and addition of zero to the given system

15
EXP.1.B STEP RESPONSE OF A SECOND ORDER SYSTEM FOR VARIOUS
VALUES OF ZETA
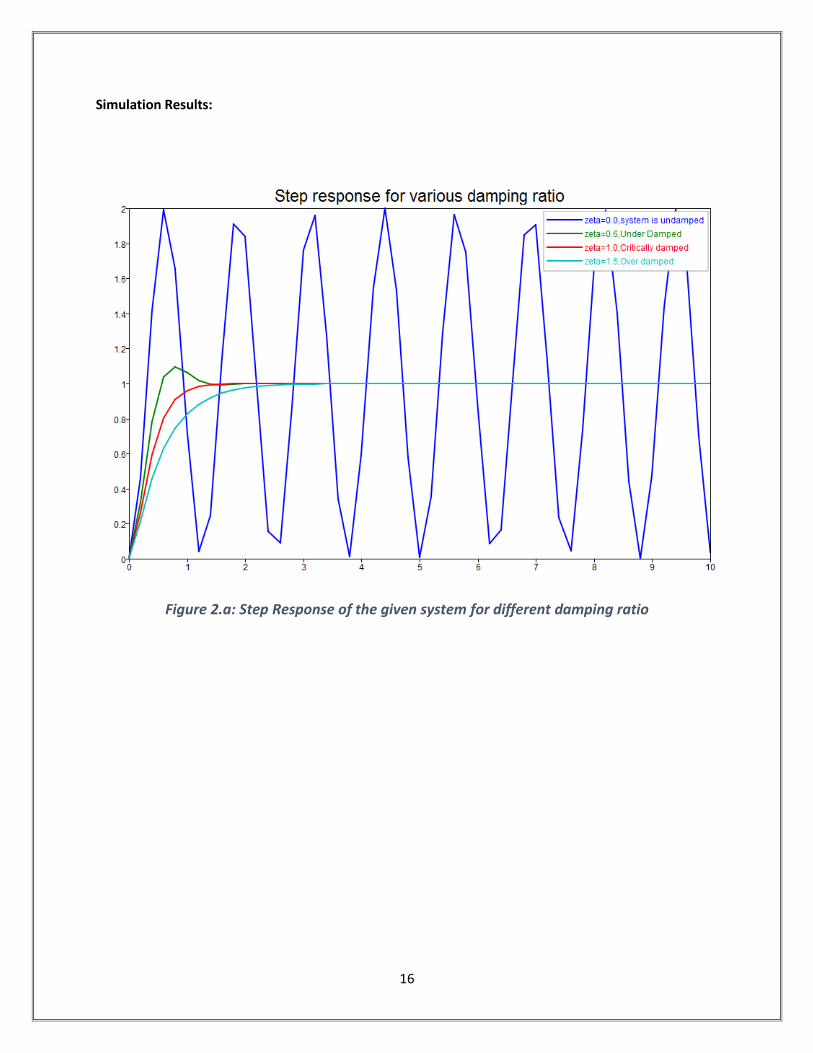
Description: Damping ratio is a dimensionless measure describing how oscillations in a system decay
after a disturbance. Many systems exhibit oscillatory behavior when they are disturbed from their position
of static equilibrium.
Software Code:
clc; close all; clear
zeta=[0 0.6 1 1.5]; % Various damping ratio
t=0:0.2:10; % Plotting time length
num=[0 0 25]; % Numerator
den1=[1 10*zeta(1) 25];
den2=[1 10*zeta(2) 25];
den3=[1 10*zeta(3) 25];
den4=[1 10*zeta(4) 25];
figure(1)
[f1,t]=step(num,den1,t);plot(t,f1);hold on; % Step Response
[f2,t]=step(num,den2,t);plot(t,f2);hold on;
[f3,t]=step(num,den3,t);plot(t,f3);hold on;
[f4,t]=step(num,den4,t);plot(t,f4);hold on;
legend('zeta=0.0,system is undamped','zeta=0.6,Under Damped','zeta=1.0,Critically
damped','zeta=1.5,Over damped')
title('Step response for various values of zeta')
16
Simulation Results:
Figure 2.a: Step Response of the given system for different damping ratio

17
EXP.2 EFFECT OF P, PD, PI AND PID CONTROLLER
Aim & Description: To obtain step response of the given system and evaluate the effect P,PD,PI and PID controllers.
A controller is a device, historically using mechanical, hydraulic, pneumatic or electronic techniques often
in combination, but more recently in the form of a microprocessor or computer, which monitors and
physically alters the operating conditions of a given dynamical system.
415.0
1)(
3
sssG
Software Code:
clc; clear; close all;
sys.num=[1]; % Numerator of the system is defined as a structure
sys.den=[0.5 1 4]; % Denominator of the system is defined as a structure
sys1=tf(sys) % Print transfer function and store it in sys1.
sys5.num=[1]; %Numerator of unity feedback system
sys5.den=[1]; %Denominator of unity feedback system
[f,G]=feedback(sys,sys5) % Gives transfer function of the system with unity feedback
[z,t]=step(G); % Step response of the system
subplot(2,3,1);plot(t,z);grid on;
title('Step response of given system');
%Proportional controller
kp=10;
sys.num=kp*sys.num; % Numerator augmented with P controller
sys2=tf(sys);
[f,G]=feedback(sys,sys5)
[z,t]=step(G);
subplot(2,3,2);
plot(t,z);grid on;
title('Proportional contol Kp=10')
k=dcgain(sys) % DC gain of the system ( s=0)
18
essP=1/(1+k)
% % PD controler
Kd=10;
numc=[Kd*kp kp]; %Transfer function of a PD controller is [ Kp+Kd*s]
sys.num=conv(numc,sys.num); % Numerator augmented with PD controller
sys3=tf(sys);
[f,G]=feedback(sys,sys5)
[m,t]=step(G);
subplot(2,3,3);plot(t,m);grid on;
title('PD control Kp=10 and Kd=10')
%PI controller
ki=10;
sys.num=[kp ki*kp]; % %Transfer function of a PI controller is [ Kp+ ki*kp/s]
denI=[1 0];
sys.den=conv(denI,sys.den);
sys4=tf(sys)
[f,G]=feedback(sys,sys5);
[m,t]=step(G);
subplot(2,3,4);plot(t,m);grid;
k=dcgain(G)
essPI=1/(1+k)
title('PI control Kp=10 and Ki=10')
% %PID controller
sys.num=conv(numc,[1 ki]); % Numerator augmented with PID controller [Kp+Ki/s+Kd*s]
sys3=tf(sys);
[f,G]=feedback(sys,sys5);
[m,t]=step(G);
subplot(2,3,5);plot(t,m);grid;
k=dcgain(G)
19
essPID=1/(1+k)
title('PID control Kp=10,Ki=10 & kd=10')
% ------------Function defined for feedback
function [f,G]=feedback(sys1,sys2)
num1=sys1.num; %Numerator of the first system
den1=sys1.den; %Denominator of the first system
num2=sys2.num; %Numerator of the second system
den2=sys2.den; %Denominator of the second system
[num1,den2]=equal_length(num1,den2); % to make numerator and denominator equal length
[den1,den2]=equal_length(den1,den2);
[num1,num2]=equal_length(num1,num2);
num_n=conv([num1],[den2]); %Numerator of the feedback system
d1=conv([den1],[den2]);
d2=conv([num1],[num2]);
[d1 d2]=equal_length(d1,d2);
den_n=d1+d2; % denominator of the feedback system
G.num=num_n;
G.den=den_n;
f=tf(G);
s1=find(G.num);
s2=find(G.den);
if s1(1)>1
G.num=[G.num(s1(1):length(G.num))]; % to avoid initial unwanted zeros in the numerator
end
if s2(1)>1
G.den=[G.den(s2(1):length(G.den))]; % to avoid initial unwanted zeros in the denominator
end
end
%Function defined to make numerator and denominator equal length
function [num1,den1]=equal_length(num1,den1)
g=abs(length(den1)-length(num1)); %Difference in the length of numerator and denominator
% To make numerator equal length with denominator
if length(den1)>length(num1)
for i=length(num1):-1:1
num1(i+g)=num1(i);
end
for l=1:g
num1(l)=0;
end
end
20
% To make denominator equal length with numerator
if length(num1)>length(den1)
for i=length(den1):-1:1
den1(i+g)=den1(i);
end
for l=1:g
den1(l)=0;
end
end
num1;
den1;
end
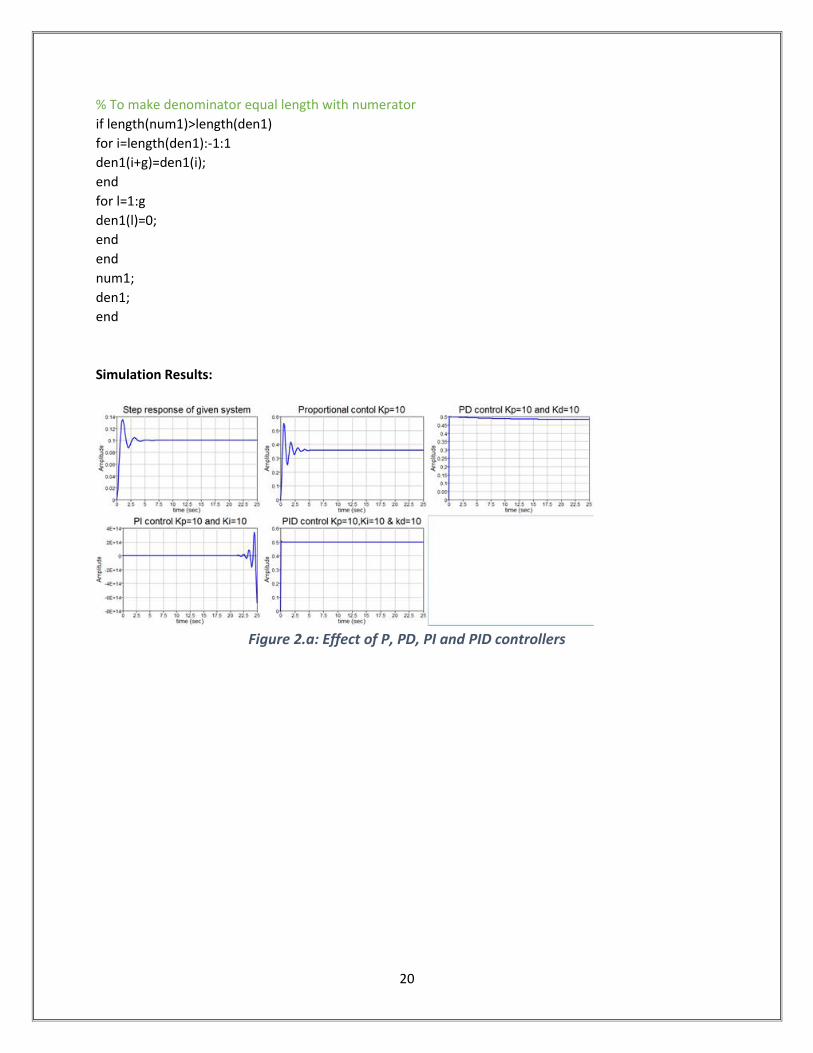
Simulation Results:
Figure 2.a: Effect of P, PD, PI and PID controllers

21
EXP.3 ROOT LOCUS, BODE AND NYQUIST PLOT
Aim & Description: 1) To sketch the root locus for the given transfer function 2) To sketch the nyquist plots for the given transfer function 3) To sketch the bode plots for the given transfer function
Root locus analysis is a graphical method for examining how the roots of a system change with
variation of a certain system parameter, commonly a gain within a feedback system.
Nyquist plot is a representation of the vector response of a feedback system (especially an amplifier) as a complex graphical plot showing the relationship between feedback and gain.
Bode plot is a graph of the frequency response of a system. It is usually a combination of a Bode
magnitude plot, expressing the magnitude (usually in decibels) of the frequency response, and a Bode phase plot, expressing the phase shift. Both quantities are plotted against a horizontal axis proportional to the logarithm of frequency.
065
1)(
23
ssssG
Software Code:
clc; clear; close all;
sys.num=[0 0 0 1]; % Numerator of the system
sys.den=[1 5 6 0]; % Denominator of the system
sys1=tf(sys); % Printing transfer function
subplot(2,2,1)
rlocus(sys); % root locus of the system
title('Root locus'); ylabel('Imaginary Axis')
% %Effect of adding poles
sys.den=conv([1 10],sys.den); % Adding poles to the denominator
sys2=tf(sys);
subplot(2,2,2)
rlocus(sys); % root locus of the system when extra poles are added
title(' Effect of adding poles');ylabel('Imaginary Axis')
% %Effect of adding zeros
22
sys.num=conv([1 1],sys.num); % Adding zeros to the denominator
sys.den=[1 5 6 0];
sys3=tf(sys);
subplot(2,2,3)
rlocus(sys); % root locus of the system when poles are added
title(' Effect of adding zeros in Root locus');ylabel('Imaginary Axis')
% % effect of k on the transient response
k=10;
t=0:0.01:20;
G.num=[0 0 0 k]
G.den=[1 5 6 k];
[z,t]=step(G); % Finding step response of the system
subplot(2,2,4);xlabel('Time');ylabel('Amplitude')
plot(t,z); grid on;
title('Effect of k on transient response');
%-------------Function defined for rlocus
function rlocus(sys)
num=sys.num;
den=sys.den;
%%---------To make numerator and denominator equal length
g=abs(length(den)-length(num));
if length(den)>length(num) % If denominator length is greater than numerator length
for i=length(num):-1:1
num(i+g)=num(i); % shifting numerator coefficients to the right
end
for l=1:g
num(l)=0; % Appending zeros to the index where numerator coefficients originally existed
end
end

23
if length(num)>length(den) % If numerator length is greater than denominator length
for i=length(den):-1:1
den(i+g)=den(i); % shifting denominator coefficients to the right
end
for l=1:g
den(l)=0; % Appending zeros to the index where denominator coefficients originally existed
end
end
%%%-------------------------
d=roots(den); % Finding poles
n=roots(num); % Finding zeros
P=length(d); % Number of poles
Z=length(n); % Number of zeros
pzmap(num,den); % P-Z map of the given system
grid on;hold on;
i = 1;
for k=0:0.1:30
r3=den+k*num; % Denominator of unity feedback system for various gain values
r2{i}=roots(r3); % poles of the feedback system
i = i+1;
end
if P==4 && Z==0 % Special case for no zeros and 4 poles
for k=0:5:1000
r3=den+k*num;
r2{i}=roots(r3);
i = i+1;
end
end
z2=cell2mat(r2); % Conversion of cell to matrix
24
%---------Extraction of values from the matrix
j=1;
for k=1:length(d)
for i=P+k:length(d):numel(z2)
b(j)=z2(i);
j=j+1;
end
%------Plotting the extracted values
for i=1:numel(b)
p1=[real(b(i)),imag(b(i))]; % Define the first point to plot the root locus
p2=[real(b(i)),imag(b(i))]; % Define the second point to plot the root locus
theta = atan2( p2(2) - p1(2), p2(1) - p1(1)); %Define slope
r = sqrt( (p2(1) - p1(1))^2 + (p2(2) - p1(2))^2); % Distance between first and second point
line = 0:0.01: r;
x = p1(1) + line*cos(theta); % set of x coordinates to plot root locus
y = p1(2) + line*sin(theta); % set of y coordinates to plot root locus
if k==1
plot(x,y,'cyan.'); % plotting different branches with different color
hold on;
end
if k==2
plot(x,y,'g.'); % plotting different branches with different color
hold on;
end
if k==3
plot(x,y,'r.'); % plotting different branches with different color
hold on;
end
if k==4
25
plot(x,y,'b.'); % plotting different branches with different color
hold on;
end
end
j=1; end;
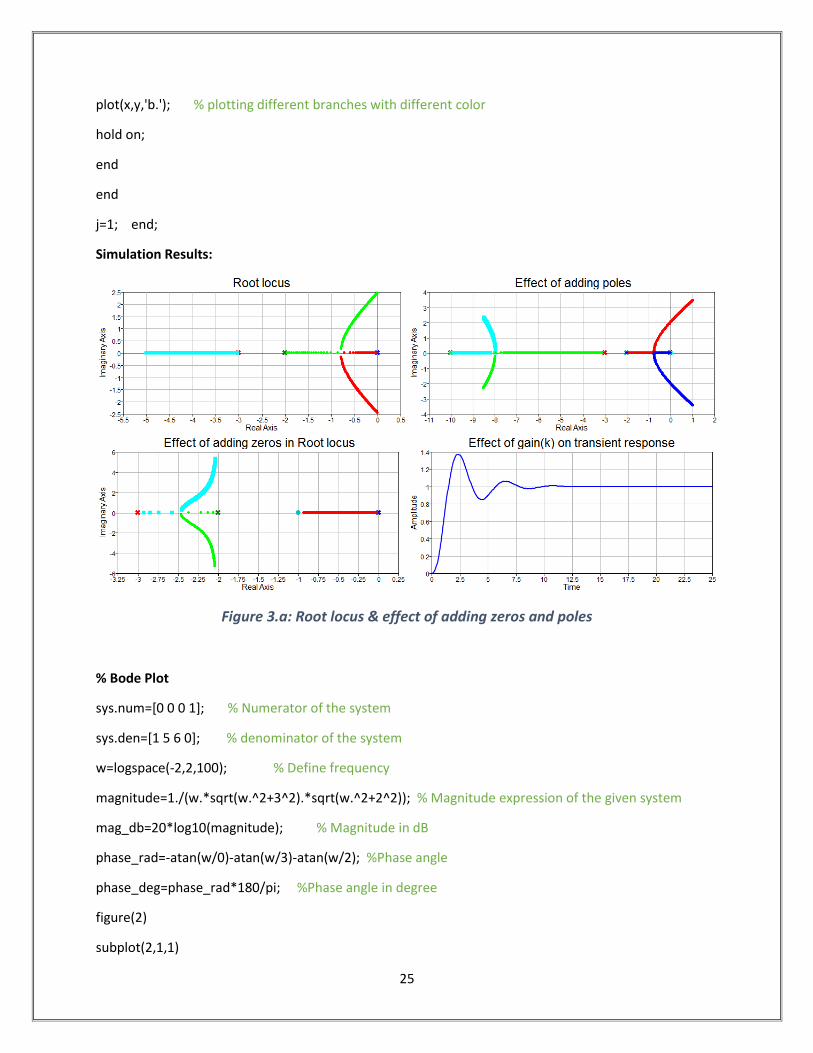
Simulation Results:
Figure 3.a: Root locus & effect of adding zeros and poles
% Bode Plot
sys.num=[0 0 0 1]; % Numerator of the system
sys.den=[1 5 6 0]; % denominator of the system
w=logspace(-2,2,100); % Define frequency
magnitude=1./(w.*sqrt(w.^2+3^2).*sqrt(w.^2+2^2)); % Magnitude expression of the given system
mag_db=20*log10(magnitude); % Magnitude in dB
phase_rad=-atan(w/0)-atan(w/3)-atan(w/2); %Phase angle
phase_deg=phase_rad*180/pi; %Phase angle in degree
figure(2)
subplot(2,1,1)

26
semilogx(w,mag_db) % Magnitude plot in semilog graph
xlabel('frequency [rad/s]'),ylabel('Magnitude [db]'),grid on;
subplot(2,1,2)
semilogx(w,phase_deg) % Phase plot
xlabel('frequency [rad/s]'),ylabel('Phase Angle [deg]'),grid on;
%%--------Gain Margin
[wgc,fval] = fsolve(@func,5) % gain crossover frequency
gm=1./(wgc.*sqrt(wgc.^2+3^2).*sqrt(wgc.^2+2^2)) % Gain Margin
%--------Phase margin
j=1;
for i=1:length(mag_db)
if mag_db(i)>-0.2 && mag_db(i)<0.2 % setting a limit for finding wpm
b(j)=(i);
j=j+1;
end
end
wpm=min(w(b)) % phase crossover frequency
pm=(-atan(wpm/0)-atan(wpm/3)-atan(wpm/2))*180/pi+180 % Phase margin
%---------Function defined for solving gain crossover frequency
function w= func(w)
f=-atan(w/0)-atan(w/3)-atan(w/2)+180;
end
27
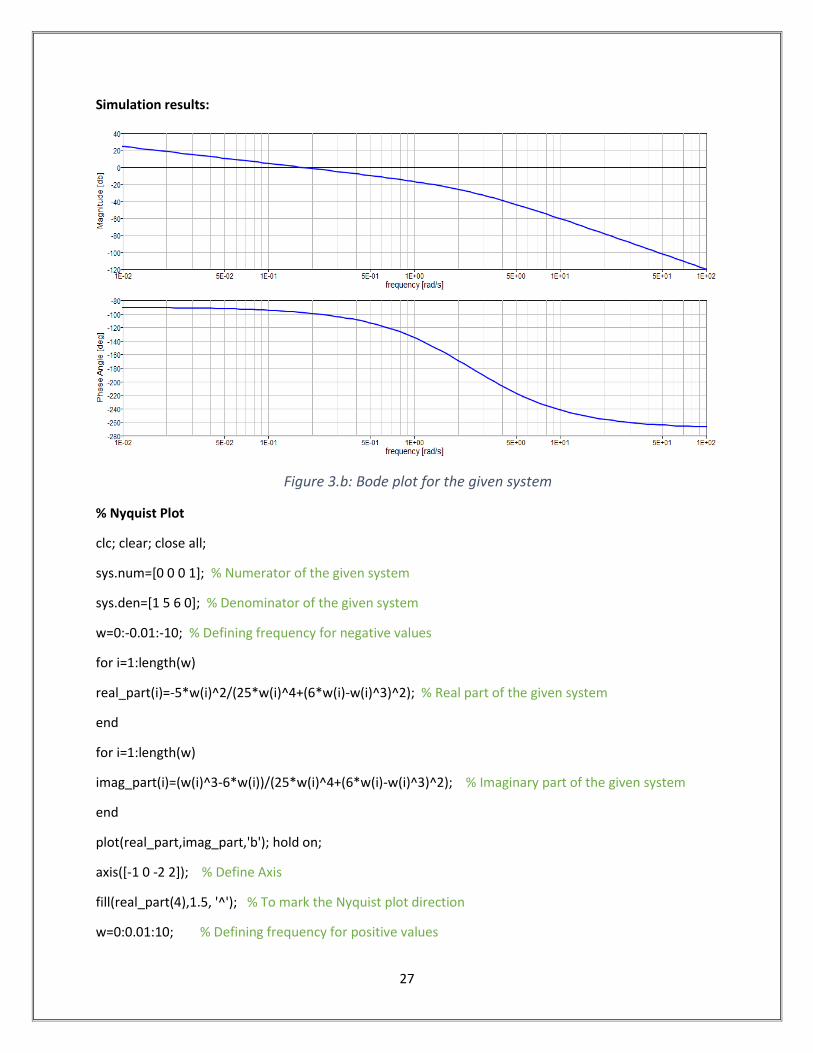
Simulation results:
Figure 3.b: Bode plot for the given system
% Nyquist Plot
clc; clear; close all;
sys.num=[0 0 0 1]; % Numerator of the given system
sys.den=[1 5 6 0]; % Denominator of the given system
w=0:-0.01:-10; % Defining frequency for negative values
for i=1:length(w)
real_part(i)=-5*w(i)^2/(25*w(i)^4+(6*w(i)-w(i)^3)^2); % Real part of the given system
end
for i=1:length(w)
imag_part(i)=(w(i)^3-6*w(i))/(25*w(i)^4+(6*w(i)-w(i)^3)^2); % Imaginary part of the given system
end
plot(real_part,imag_part,'b'); hold on;
axis([-1 0 -2 2]); % Define Axis
fill(real_part(4),1.5, '^'); % To mark the Nyquist plot direction
w=0:0.01:10; % Defining frequency for positive values
28
for i=1:length(w)
real_part(i)=-5*w(i)^2/(25*w(i)^4+(6*w(i)-w(i)^3)^2);
end
for i=1:length(w)
imag_part(i)=(w(i)^3-6*w(i))/(25*w(i)^4+(6*w(i)-w(i)^3)^2);
end
plot(real_part,imag_part,'b'); hold on;
axis([-1 0 -2 2]); % Define Axis
xlabel('Real Axis'); ylabel('Imaginary Axis');
fill(real_part(4),-1.5, '^');
grid on;
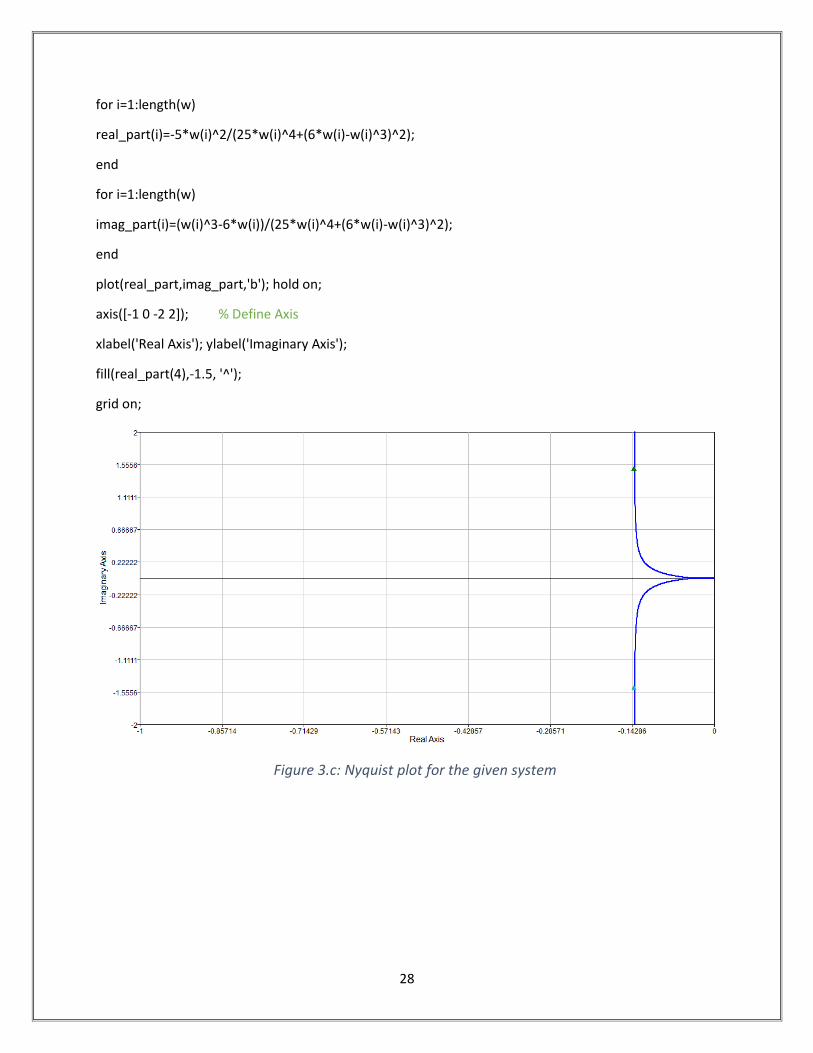
Figure 3.c: Nyquist plot for the given system

29
EXP.4 RELATION BETWEEN FREQUENCY RESPONSE AND TRANSIENT
RESPONSE
Aim & Description: To obtain the relation between frequency response and transient response
Transient response or natural response is the response of a system to a change from an
equilibrium or a steady state.
Frequency response is the quantitative measure of the output spectrum of a system or device in
response to a stimulus, and is used to characterize the dynamics of the system. It is a measure of
magnitude and phase of the output as a function of frequency, in comparison to the input.
Software Code:
clc; clear; close all;
zeta=0:0.01:0.8; % Different damping ratio values
num=[1]; % Numerator
den=conv([1 0],[0.1 1]) % Denominator
g=tf(num,den);
w=logspace(-1,3,100); % Frequency range in log scale
magnitude=10./(w.*sqrt(w.^2+10^2)); % Magnitude expression
mag_db=20*log10(magnitude); % Magnitude expression in decibel
phase_rad=-atan(w/0)-atan(w/10); % Phase angle expression in radian
phase_deg=phase_rad*180/pi; % Phase angle expression in degree
figure(1)
subplot(2,1,1)
semilogx(w,mag_db) % Magnitude plot in semilog graph
xlabel('frequency [rad/s]'),ylabel('Magnitude [db]'),grid on;
subplot(2,1,2)
semilogx(w,phase_deg) % Phase plot in semi log graph
xlabel('frequency [rad/s]'),ylabel('Phase Angle [deg]'),grid on;
%% ---------Gain Margin
[wgc,fval] = fsolve(@gain_margin,5)
gm=1./(wgc.*sqrt(wgc.^2+10^2)) %---Gain margin
30
%--------Phase margin
j=1;
for i=1:length(mag_db)
if mag_db(i)>-0.25 && mag_db(i)<0.25 % Selection criteria for finding the index of corresponding 0db
frequency
b(j)=(i);
j=j+1;
end
end
wpm=min(w(b)) % phase crossover frequency
pm=(-atan(wpm/0)-atan(wpm/10))*180/pi+180 %---Phase margin
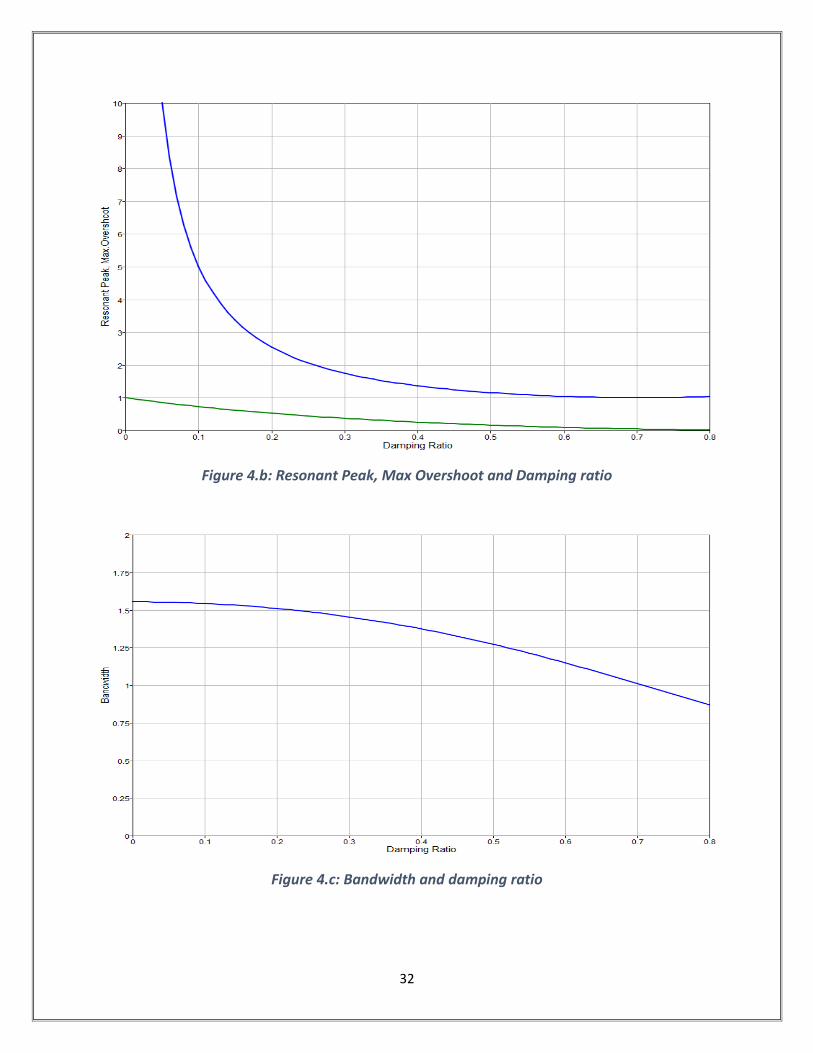
for i=1:length(zeta)
resonant_peak(i)=1/(2*zeta(i)*sqrt(1-zeta(i)^2)); % expression for finding resonant peak
end
for i=1:length(zeta)
max_overshoot(i)=exp(-pi*zeta(i)/sqrt(1-zeta(i)^2)); % expression for finding maximum overshoot
end
for i=1:length(zeta)
bandwidth(i)=1*sqrt((1-2*zeta(i)^2)+sqrt(4*zeta(i)^4-4*zeta(i)^2+2)); %expression for finding bandwidth
end
figure(2)
plot(zeta,resonant_peak)
axis([0 0.8 0 10]);
hold on
plot(zeta,max_overshoot)
hold off; grid on;
xlabel('zeta')
ylabel('resonant peak,max.overshoot')
figure(3)
31
plot(zeta,bandwidth); grid on;
axis([0 0.8 0 2]);
xlabel('zeta')
ylabel('bandwidth')
%%%----Function for finding gain margin
function w= gain_margin(w)
f=-atan(w/0)-atan(w/10)+180;
end
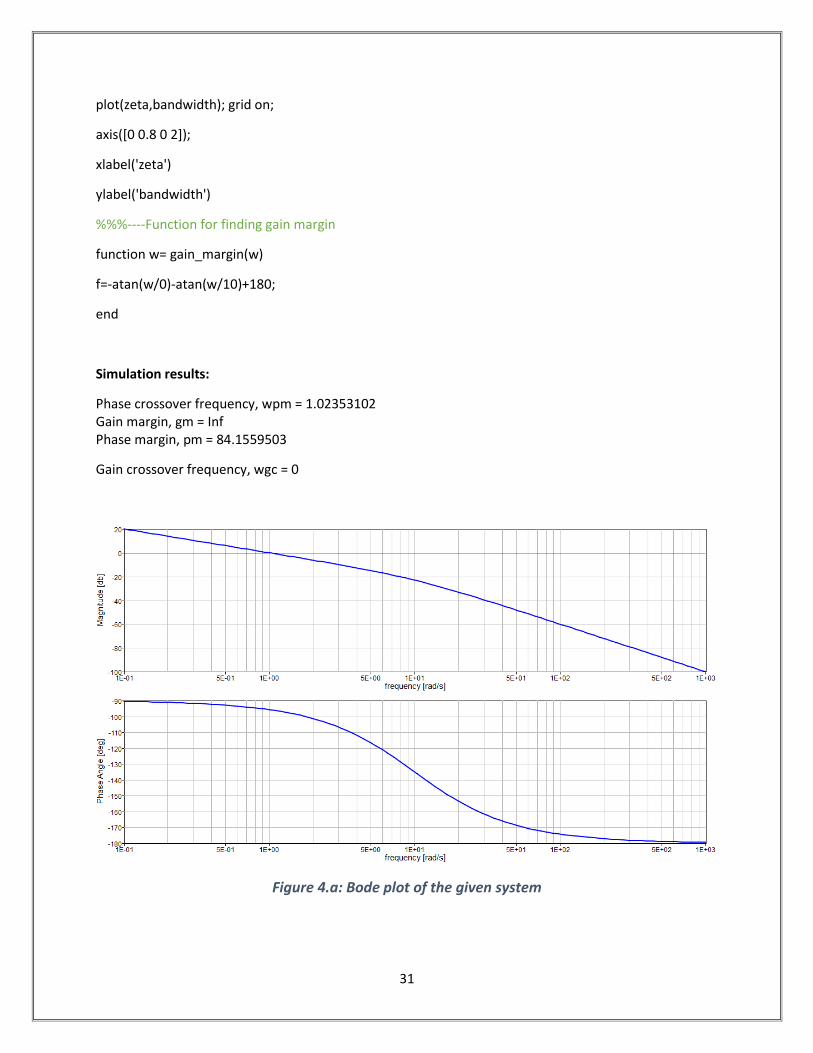
Simulation results:
Phase crossover frequency, wpm = 1.02353102 Gain margin, gm = Inf Phase margin, pm = 84.1559503
Gain crossover frequency, wgc = 0
Figure 4.a: Bode plot of the given system
32
Figure 4.b: Resonant Peak, Max Overshoot and Damping ratio
Figure 4.c: Bandwidth and damping ratio