controllability, uniqueness and existence of the ... · sponses even within an apparently safe...
TRANSCRIPT

International Journal of Solids and Structures 48 (2011) 1867–1878
Contents lists available at ScienceDirect
International Journal of Solids and Structures
journal homepage: www.elsevier .com/locate / i jsols t r
Controllability, uniqueness and existence of the incremental response:A mathematical criterion for elastoplastic constitutive laws
Giuseppe Buscarnera ⇑, Giuseppe Dattola, Claudio di PriscoPolitecnico di Milano, Department of Structural Engineering, Piazza Leonardo da Vinci, 32, 20133 Milan, Italy
a r t i c l e i n f o a b s t r a c t
Article history:Received 30 September 2010Received in revised form 7 February 2011Available online 1 March 2011
Keywords:Mechanical instabilitySecond-order workElastoplasticityNon-associativityTest controllability
0020-7683/$ - see front matter � 2011 Elsevier Ltd. Adoi:10.1016/j.ijsolstr.2011.02.016
⇑ Corresponding author. Tel.: +39 02 2399 4315; faE-mail address: [email protected] (G. Busc
In this paper the onset of instabilities in elastoplastic materials is theoretically studied and a conceptualbasis for understanding the physical implications of a loss of uniqueness and/or existence of the incre-mental response is provided. For this purpose, the concept of test controllability is reinterpreted andmixed stress–strain loading programmes are accounted for. A set of scalar indices, the moduli of instabil-ity, related with the inception of an unstable response is introduced and their dependency on the loadingprogramme is explicitly illustrated. The paper shows that the use of these newly defined scalar measuresprovides support for an alternative definition for mechanical stability, which is closely related with themathematical notions of existence and uniqueness of the predicted incremental response. In the final sec-tion, some mathematical properties of the moduli of instability are discussed, suggesting a novel reinter-pretation of other well established theories and providing additional tools for the future application ofthe proposed framework.
� 2011 Elsevier Ltd. All rights reserved.
1. Introduction
The proper definition of the concept of failure still represents afundamental and unsolved mechanical issue. According to a com-mon engineering perspective, the identification of failure condi-tions for a solid material requires the assessment of a limit locusat which failure occurs. This apparently unambiguous concept,however, becomes less neat when complex natural and engineeredmaterials are considered. A notable example is represented bysoils, rocks and concrete (often referred to as geomaterials). In thesecases, in fact, the material can suffer a broad range of unstable re-sponses even within an apparently safe domain. Sophisticatedmodeling tools and efficient computational techniques are there-fore required in order to capture the experimental evidence andto implement these models in numerical codes for solving bound-ary value problems.
During the last few decades, several theoretical approacheshave been proposed to deal with material instability at a constitu-tive level (Darve and Chau, 1987; Nova, 1989, 1994; Darve, 1994;Chambon, 2005; Borja, 2006). Most of these theories tried to gen-eralize the concept of failure, giving it a much broader meaning(Nova, 2003). Different strategies were used to identify unstableconditions: Imposimato and Nova (1998) discussed for instancethe vanishing of suitable mathematical operators governing thematerial response, Nicot et al. (2007) studied the sign of the
ll rights reserved.
x: +39 02 2399 4220.arnera).
second-order work, while Sibille et al. (2007) combined severalmodeling techniques. In particular, Imposimato and Nova (1998)introduced the notion of test controllability, showing that, depend-ing on the particular loading programme imposed to the soil spec-imen, critical conditions can arise even within the hardeningregime. This concept provided an enlightening interpretation ofthe Hill’s stability criterion (1958), suggesting an alternativemechanical meaning for it.
Although these approaches are based on consistent premises,their use becomes less powerful when more general initial andloading conditions are accounted for. The concept of second-orderwork, in fact, does not provide any insight into the role of controlparameters (e.g., in case of mixed stress–strain loading paths).Moreover, since the theory of test controllability has been devel-oped and widely applied to treat instabilities in the hardening re-gime, it can present disadvantages when this particular case isabandoned (e.g., in rock-like materials, that are often characterizedby a marked strain-softening response).
This paper stems from the necessity of providing a consistenttheoretical reference capable of assessing the stability of a givenstress state in a more general and flexible manner. Therefore, analternative approach for addressing geomaterial instability is herepresented, with the main goal of explaining material instability un-der a different perspective. For the sake of simplicity, the followingdiscussion is restricted to the case of rate-independent elastoplas-tic constitutive laws (also referred to as models with two ‘‘tensorialzones’’ (Nicot and Darve, 2005)). Even though this choice doesnot include important issues (e.g., the effects of full incremental
1868 G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878
non-linearity on bifurcation processes), the study of the standardstrain-hardening elastoplastic response allows to further clarifythe link between test controllability and second-order work. Theapproach presented in this paper encloses the same principlescharacterizing other successful theories, and some of the resultsthat will be presented are already known in the literature (Klisinskiet al., 1992; Imposimato and Nova, 1998). The concept of test con-trollability, however, is organized in a different way: (i) establish-ing a more explicit link with the notions of existence anduniqueness of the material response, (ii) introducing alternativemathematical indices of instability (defined as moduli of instability)and (iii) allowing for an easier application to brittle materials.
2. Material stability and its mathematical definition
The concept of material instability represents a crucial notion inmechanics and in engineering in general. In confirmation of this,there is a large variety of criteria enabling the assessment of stabil-ity conditions. Some of these criteria are briefly recalled in thefollowing.
In the context of continuum mechanics, a well known and lar-gely used stability criterion is that proposed by Hill (1958). Accord-ing to this criterion, a sufficient condition for stability is thepositive definitiveness of the second-order work:
d2W ¼ 12
_rij _eij > 0; 8 _eij ð1Þ
where _rij represents the stress rate tensor and _eij the correspondingstrain rate tensor. This criterion can be shown to be a powerful toolto envisage the onset of diffuse instabilities and can be associatedwith the loss of existence and uniqueness of the incremental re-sponse (Darve et al., 2004; Nicot and Darve, 2007).
From this point of view, a major contribution in the frameworkof elastoplasticity has been given by Maier and Hueckel (1979).These authors addressed the evaluation of material stability andthe admissibility of an incremental stress path in presence of bothnon-associated flow rule and strain-softening. Since the conven-tional definition of material stability was based on the Hill’s stabil-ity criterion, the authors evaluated the minimum value of thequadratic form associated with the second-order work density,d2WMIN. The latter quantity was evaluated by expressing d2WMIN
as a function of the incremental strain path and assuming a unitaryplastic multiplier (Maier and Hueckel, 1979). The purpose of theseassumptions was to study the sign of d2WMIN, and following thisanalytical procedure d2WMIN turned out to be a quadratic scalarfunction of the hardening modulus H:
d2 WM
IN
H = 0
H = Hc(critical
hardening modulus)
H = Hc/2
H Hardening
Modulus
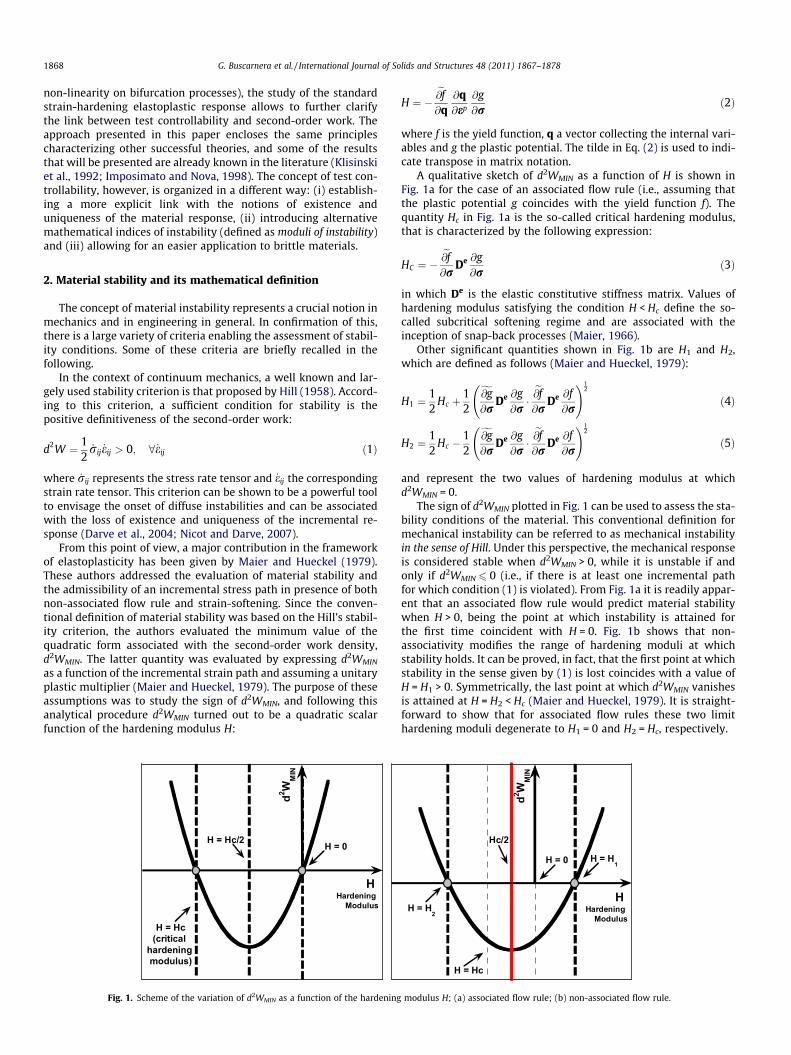
Fig. 1. Scheme of the variation of d2WMIN as a function of the hardening
H ¼ �e@f@q
@q@ep
@g@r
ð2Þ
where f is the yield function, q a vector collecting the internal vari-ables and g the plastic potential. The tilde in Eq. (2) is used to indi-cate transpose in matrix notation.
A qualitative sketch of d2WMIN as a function of H is shown inFig. 1a for the case of an associated flow rule (i.e., assuming thatthe plastic potential g coincides with the yield function f). Thequantity Hc in Fig. 1a is the so-called critical hardening modulus,that is characterized by the following expression:
HC ¼ �e@f@r
De @g@r
ð3Þ
in which De is the elastic constitutive stiffness matrix. Values ofhardening modulus satisfying the condition H < Hc define the so-called subcritical softening regime and are associated with theinception of snap-back processes (Maier, 1966).
Other significant quantities shown in Fig. 1b are H1 and H2,which are defined as follows (Maier and Hueckel, 1979):
H1 ¼12
Hc þ12
f@g@r
De @g@r�e@f@r
De @f@r
!12
ð4Þ
H2 ¼12
Hc �12
f@g@r
De @g@r�e@f@r
De @f@r
!12
ð5Þ
and represent the two values of hardening modulus at whichd2WMIN = 0.
The sign of d2WMIN plotted in Fig. 1 can be used to assess the sta-bility conditions of the material. This conventional definition formechanical instability can be referred to as mechanical instabilityin the sense of Hill. Under this perspective, the mechanical responseis considered stable when d2WMIN > 0, while it is unstable if andonly if d2WMIN 6 0 (i.e., if there is at least one incremental pathfor which condition (1) is violated). From Fig. 1a it is readily appar-ent that an associated flow rule would predict material stabilitywhen H > 0, being the point at which instability is attained forthe first time coincident with H = 0. Fig. 1b shows that non-associativity modifies the range of hardening moduli at whichstability holds. It can be proved, in fact, that the first point at whichstability in the sense given by (1) is lost coincides with a value ofH = H1 > 0. Symmetrically, the last point at which d2WMIN vanishesis attained at H = H2 < Hc (Maier and Hueckel, 1979). It is straight-forward to show that for associated flow rules these two limithardening moduli degenerate to H1 = 0 and H2 = Hc, respectively.
d2 WM
IN
H Hardening
Modulus
H = 0
H = H2
H = H1
H = Hc
Hc/2
modulus H; (a) associated flow rule; (b) non-associated flow rule.

G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878 1869
The conceptual role of d2WMIN that is reflected by Fig. 1, how-ever, is not exhaustive if two crucial aspects are overlooked: (i)the plastic admissibility of the incremental loading and (ii) the roleof control conditions. Concerning the first aspect, an incrementalloading path is admissible if the following plastic constraints aresatisfied:
_f 6 0; K P 0 and _fK ¼ 0 ð6Þ
where K represents the plastic multiplier retrieved from theenforcement of the plastic consistency condition. It is possible todemonstrate that the procedure used to calculate d2WMIN in Fig. 1does not enforce all plastic admissibility constraints in the regionof negative hardening moduli and, thus, part of the information pro-vided by d2WMIN is not consistent with the framework of classicalelastoplasticity (Maier and Hueckel, 1979). In particular, the posi-tive values of d2WMIN obtained in the region of negative hardeningmodulus may lead to the misleading conclusion that stability holdsalso for H < H2.
The second aspect that restricts the usefulness of the Hill’s sta-bility criterion concerns the role played by test control conditions.If such a stability criterion is accepted in its conventional form, infact, the notion of material stability appears to be an intrinsic char-acteristic of the current stress state. In contrast with this, it is wellknown that both existence and uniqueness can be affected by theparticular choice of the control parameters (Klisinski et al., 1992).In other words, material stability cannot be considered an intrinsiccharacteristic of the material system, but it is rather a function ofboth its initial state and the type of external perturbation.
In the following sections of this paper it will presented an ap-proach aimed at overcoming the above mentioned limitations. Inorder to recognize the control dependent nature of material stabil-ity, the so-called theory of test controllability will be adopted(Nova, 1994; Imposimato and Nova, 1998). This framework inves-tigates from a purely mathematical standpoint the possibility ofapplying a well defined incremental perturbation. Under this per-spective, a loading programme is considered controllable if andonly if the predicted incremental response exists and it is unique.As a result, the concept of test controllability provides an alterna-tive definition for instability, which can be referred to as instabilityin the sense of test controllability.
3. An alternative mathematical interpretation for testcontrollability
3.1. Conceptual links between the loss of test controllability and theloss of definition of the plastic multiplier
The practical use of the theory of test controllability in its origi-nal version was based on the study of the determinant of the con-stitutive control matrix associated with a specific loadingprogramme. This type of approach may be characterized by impor-tant drawbacks, however, when the control matrix suffers a dis-continuous transition (e.g., at plastic yielding or after a change ofcontrol conditions). These transitions may be the major cause ofthe passage from stable to unstable conditions, and difficulties ex-ist in using matrix determinants to assess material stability.
In this section an alternative mathematical form of the conceptof test controllability will be provided, with the purpose of extend-ing its range of application and showing the close relation with thenotions of plastic admissibility, existence and uniqueness. Follow-ing Nova (1994), let us consider a laboratory test on a solid speci-men. If during the test stress increments are controlled, theincrement of strains can be formally retrieved as follows
_e ¼ D�1 _r ð7Þ
provided that the constitutive stiffness matrix D in (7) is not singu-lar (i.e., detD – 0).
Within an elastoplastic constitutive framework a singularity ofthe constitutive stiffness matrix coincides with the vanishing of thehardening modulus H. The singularity of D represents the attain-ment of failure in the classical sense, i.e., the attainment of the lim-it locus in the stress space. If H = 0, in fact, either no solution for anarbitrary stress increment or infinite solutions for a vanishingstress increment are possible. Classical failure is thus interpretedas a particular form of loss of existence and/or uniqueness of theincremental response.
An alternative description of the same mathematical circum-stance is obtained considering the analytical form of the plasticmultiplier under pure stress control. By imposing the plastic con-sistency condition, the following expression for the plastic multi-plier follows:
K ¼ 1H
e@f@r
_r ð8Þ
Eq. (8) shows that, when the limit locus is reached under stress con-trolled conditions, the plastic multiplier is no longer defined. Such aloss of definition results from the vanishing of the hardening mod-ulus H at failure and is in close relation with the possibility of hav-ing arbitrary solutions in terms of strain increments.
This simple example shows the clear link among the evolutionof the hardening modulus, the loss of definition of the plastic mul-tiplier and the singularity of the constitutive matrix. Eq. (8), how-ever, does not represent the appropriate expression for the plasticmultiplier under any general loading programme. On the contrary,the mathematical expression of K can be demonstrated to bedependent on the particular control conditions imposed during alaboratory test. This is confirmed by the well known expressionof the plastic multiplier under pure strain control conditions:
K ¼ 1H � HC
e@f@r
De _e ð9Þ
From a theoretsical viewpoint, also this type of loading pro-gramme can suffer a particular form of instability that is associatedwith critical softening (Maier, 1966) and takes place when:
H ¼ HC ð10Þ
As already pointed out, condition (10) is conceptually associ-ated with snap-back processes. Even though the latter phenomenaare rarely observed in experiments, their existence at materialpoint level is still a matter of debate, and their phenomenologicalinterpretation may heavily depend on the scale at which themechanical response is observed. Thus, this study does not excludea priori the occurrence of snap-back processes, considering thecapability of encompassing also this form of failure a convenientfeature for a complete mathematical framework.
The theory of test controllability can describe also this kind ofunstable responses, being the onset of sub-critical softening re-lated with the vanishing of the determinant of the compliance ma-trix (Imposimato and Nova, 1998). Nevertheless, the loss ofdefinition of the plastic multiplier offers an alternative theoreticalsupport to identify the onset of instabilities. The attainment of crit-ical softening, in fact, can be also identified when a particular sca-lar quantity vanishes. This alternative scalar measure is defined inthis case as follows:
HIN ¼ H � HC ð11Þ
Similar to the case of pure stress control, also here a loss of def-inition of the plastic multiplier is attained at the onset of instabil-ity. As a result, the index given in Eq. (11) plays a similar role tothat of the hardening modulus of Eq. (8).

1870 G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878
Using such an analogy, a new family of scalar measures deter-mining the loss of definition of the plastic multiplier can be intro-duced, being a sort of generalized hardening moduli governing themechanical response under mixed stress–strain controls. Thesequantities vanish when the test controllability is lost, taking nega-tive values when the incremental loading programme is no longeradmissible (i.e., when at least one of the constraints given by Eq.(6) cannot be satisfied). Since the new indices of instability arenot exactly related with plastic hardening phenomena, but arerather associated with the more general notion of mechanicalinstability, the term modulus of instability will be preferred.
The idea of relating the onset of a loss of uniqueness of theincremental response to the evolution of the hardening modulushas been exploited by several researchers in the past. Critical val-ues of the plastic hardening modulus can indeed be associatedwith the loss of positiveness of the second-order work (Hueckeland Maier, 1977; Maier and Hueckel, 1979), the onset of shearstrain localization (Bigoni and Hueckel, 1991a,b) or even with theattainment of static liquefaction (di Prisco and Nova, 1994; diPrisco et al., 1995; Andrade, 2009).
The new approach here presented recasts this concept in analternative way by systematically applying it to general forms ofmaterial instability. A possible strategy to identify unstable phe-nomena can indeed be based on convenient mathematical indicesthat are function of the current value of the hardening modulus.Any instability index has to be associated with a loading pro-gramme (being then a control dependent index) with its sign pro-viding an indication on the current stability conditions withrespect to the given loading programme.
It will be pointed out that the new approach encloses the sameprinciples characterizing some already existing theories dealingwith soil instability (Klisinski et al., 1992; Imposimato and Nova,1998) and guarantees continuity with well established frame-works. At the same time, it will be shown that the new frameworkbased on the moduli of instability enables a thorough discussion onthe notions of existence, uniqueness and controllability and allowsto stress the somehow unappreciated link between these concepts.
3.2. Mixed stress–strain test control conditions: a framework fordefining the moduli of instability
In the present section a direct link between the loss of control-lability under general control conditions and the proposed theoret-ical framework based on the instability moduli is established. Forthis purpose, the concepts briefly outlined in the previous sectionare further extended to more general loading programmes.
As discussed by Imposimato and Nova (1998), the laboratorytests that are aimed at investigating the mechanical response of so-lid materials are often characterized by mixed stress–strain controlconditions. These mixed constraints represent a major reason forthe initiation of particular forms of instability (e.g., shear banding,compaction banding, static liquefaction, etc.), and Imposimato andNova (1998) provided a mathematical interpretation for thisimportant issue. Their results showed that a general loss of con-trollability may be studied by observing the evolution of certainminors of the constitutive stiffness matrix. If a particular set ofcontrol parameters is governed, control matrices may become sin-gular and potential instabilities can be activated even before clas-sical failure. These instability modes are contingent to specificcontrol conditions, and they would not be induced under differentconstraints. For this reason they represent a proper form of latentinstability.
A similar interpretation of the role played by test control con-ditions can be obtained by exploiting the conceptual link be-tween loss of controllability and loss of definition of the plasticmultiplier also for mixed stress–strain controls. For this purpose,
the plastic multiplier can be calculated following a particularstrategy. Let us consider the following partition of the incremen-tal constitutive law:
_ra
_rb
� �¼
Daa Dab
Dba Dbb
� �_ea
_eb
� �ð12Þ
Let us further assume to perform an incremental loading pathunder mixed stress–strain control conditions, taking for instance_ra and _eb as control variables, being _ea and _rb the correspondingresponse variables.
The consistency condition, expressed in terms of stress rates,takes the following form:e@f@ra
_ra þe@f@rb
_rb � HK ¼ 0 ð13Þ
Let us introduce the elastic part of the incremental constitutive law:
_ra
_rb
� �¼
Deaa De
ab
Deba De
bb
" #_eea
_eeb
( )ð14Þ
By using Eq. (14), it is possible to express the stress and strain mea-sures appearing in the previous matrix partition as follows:
_rb ¼ Deba _ee
a þ Debb
_eeb ð15Þ
_eea ¼ ðD
eaaÞ�1 _ra � ðDe
aa�1De
ab_eeb ð16Þ
in which it has been assumed that Deaa is not singular. Combining
Eqs. (15) and (16), the following expression for _rb is retrieved:
_rb ¼ DebaðD
eaaÞ�1 _ra þ De
bb � DebaðD
eaa�1De
ab
� �_eeb ð17Þ
As a consequence, Eq. (13) turns into:
e@f@ra
_ra þe@f@rb
DebaðD
eaaÞ�1 _ra þ
e@f@rb
Debb � De
baðDeaaÞ�1De
ab
� �_eeb � HK ¼ 0
ð18Þ
A simpler expression is obtained introducing the trial stressincrement (i.e., the stress increment that would be obtained forthe considered control conditions if the material were purely elas-tic). If the partition (12) is considered, being _ra and _eb the controlvariables, the trial stress is given by
_rtra
_rtrb
( )¼
_ra
DebaðD
eaaÞ�1 _ra þ De
bb � DebaðD
eaa�1De
ab
� �_eb
( )ð19Þ
If it is further considered that _eeb ¼ _eb � _ep
b and _epb ¼ K @g
@rb, Eq. (18)
leads to
K ¼ 1H � Hv
f@f@r
_rtr ð20Þ
in which Hv represents a family of scalar quantities which, togetherwith the hardening modulus, control the inelastic response. Giventhe scalar nature of such quantities and their control dependency,in the following they will be referred to as moduli of controllability.For a given set of control parameters, the value of Hv in (20) is givenby the following expression:
Hv ¼ �e@f@rb
Debb � De
baðDeaaÞ�1De
ab
� � @g@rb
ð21Þ
which under pure strain control coincides with the critical harden-ing modulus HC.
An equivalent definition for the controllability modulus undermixed stress–strain control can be obtained in terms of compliancematrix. The elastic law can in fact be rewritten as:
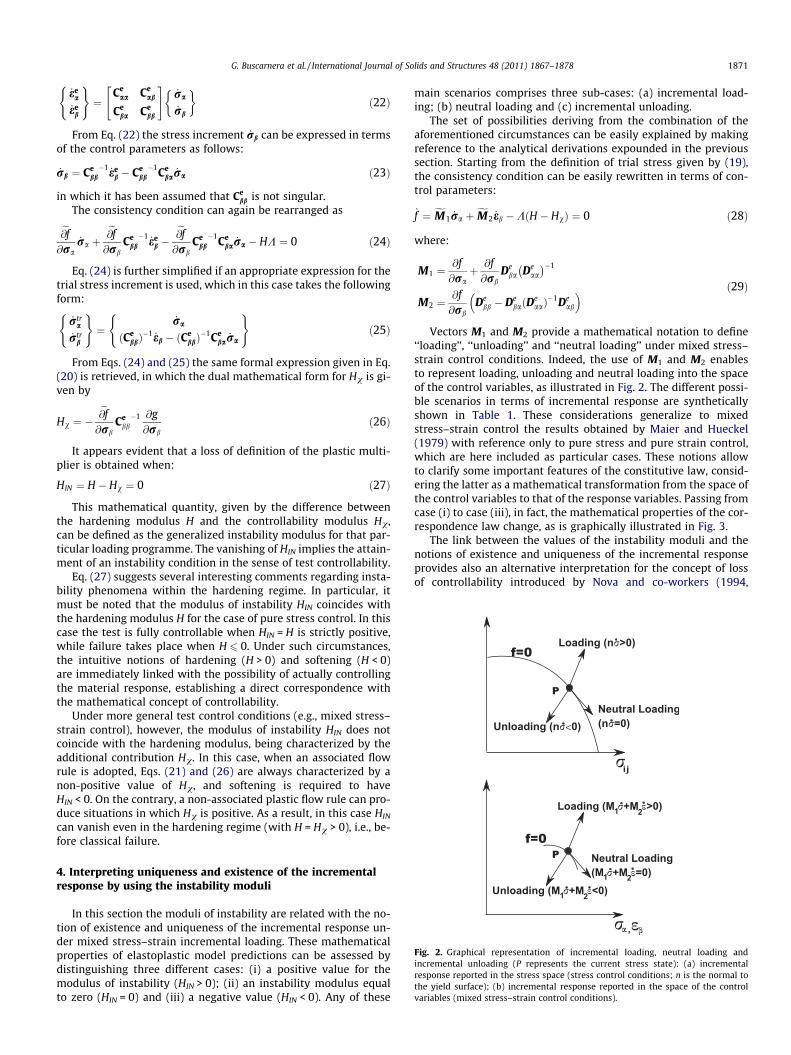
Fig. 2. Graphical representation of incremental loading, neutral loading andincremental unloading (P represents the current stress state): (a) incrementalresponse reported in the stress space (stress control conditions; n is the normal tothe yield surface); (b) incremental response reported in the space of the controlvariables (mixed stress–strain control conditions).
G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878 1871
_eea
_eeb
( )¼
Ceaa Ce
ab
Ceba Ce
bb
" #_ra
_rb
� �ð22Þ
From Eq. (22) the stress increment _rb can be expressed in termsof the control parameters as follows:
_rb ¼ Cebb
�1 _eeb � Ce
bb
�1Ceba
_ra ð23Þ
in which it has been assumed that Cebb is not singular.
The consistency condition can again be rearranged ase@f@ra
_ra þe@f@rb
Cebb
�1 _eeb �
e@f@rb
Cebb
�1Ceba
_ra � HK ¼ 0 ð24Þ
Eq. (24) is further simplified if an appropriate expression for thetrial stress increment is used, which in this case takes the followingform:
_rtra
_rtrb
( )¼
_ra
ðCebbÞ�1 _eb � ðCe
bb�1Ce
ba_ra
( )ð25Þ
From Eqs. (24) and (25) the same formal expression given in Eq.(20) is retrieved, in which the dual mathematical form for Hv is gi-ven by
Hv ¼ �e@f@rb
Cebb�1 @g@rb
ð26Þ
It appears evident that a loss of definition of the plastic multi-plier is obtained when:
HIN ¼ H � Hv ¼ 0 ð27Þ
This mathematical quantity, given by the difference betweenthe hardening modulus H and the controllability modulus Hv,can be defined as the generalized instability modulus for that par-ticular loading programme. The vanishing of HIN implies the attain-ment of an instability condition in the sense of test controllability.
Eq. (27) suggests several interesting comments regarding insta-bility phenomena within the hardening regime. In particular, itmust be noted that the modulus of instability HIN coincides withthe hardening modulus H for the case of pure stress control. In thiscase the test is fully controllable when HIN = H is strictly positive,while failure takes place when H 6 0. Under such circumstances,the intuitive notions of hardening (H > 0) and softening (H < 0)are immediately linked with the possibility of actually controllingthe material response, establishing a direct correspondence withthe mathematical concept of controllability.
Under more general test control conditions (e.g., mixed stress–strain control), however, the modulus of instability HIN does notcoincide with the hardening modulus, being characterized by theadditional contribution Hv. In this case, when an associated flowrule is adopted, Eqs. (21) and (26) are always characterized by anon-positive value of Hv, and softening is required to haveHIN < 0. On the contrary, a non-associated plastic flow rule can pro-duce situations in which Hv is positive. As a result, in this case HIN
can vanish even in the hardening regime (with H = Hv > 0), i.e., be-fore classical failure.
4. Interpreting uniqueness and existence of the incrementalresponse by using the instability moduli
In this section the moduli of instability are related with the no-tion of existence and uniqueness of the incremental response un-der mixed stress–strain incremental loading. These mathematicalproperties of elastoplastic model predictions can be assessed bydistinguishing three different cases: (i) a positive value for themodulus of instability (HIN > 0); (ii) an instability modulus equalto zero (HIN = 0) and (iii) a negative value (HIN < 0). Any of these
main scenarios comprises three sub-cases: (a) incremental load-ing; (b) neutral loading and (c) incremental unloading.
The set of possibilities deriving from the combination of theaforementioned circumstances can be easily explained by makingreference to the analytical derivations expounded in the previoussection. Starting from the definition of trial stress given by (19),the consistency condition can be easily rewritten in terms of con-trol parameters:
_f ¼ fM1 _ra þfM2 _eb �KðH � HvÞ ¼ 0 ð28Þ
where:
M1 ¼@f@raþ @f@rb
Deba De
aa
� �1
M2 ¼@f@rb
Debb � De
baðDeaaÞ�1De
ab
� � ð29Þ
Vectors M1 and M2 provide a mathematical notation to define‘‘loading’’, ‘‘unloading’’ and ‘‘neutral loading’’ under mixed stress–strain control conditions. Indeed, the use of M1 and M2 enablesto represent loading, unloading and neutral loading into the spaceof the control variables, as illustrated in Fig. 2. The different possi-ble scenarios in terms of incremental response are syntheticallyshown in Table 1. These considerations generalize to mixedstress–strain control the results obtained by Maier and Hueckel(1979) with reference only to pure stress and pure strain control,which are here included as particular cases. These notions allowto clarify some important features of the constitutive law, consid-ering the latter as a mathematical transformation from the space ofthe control variables to that of the response variables. Passing fromcase (i) to case (iii), in fact, the mathematical properties of the cor-respondence law change, as is graphically illustrated in Fig. 3.
The link between the values of the instability moduli and thenotions of existence and uniqueness of the incremental responseprovides also an alternative interpretation for the concept of lossof controllability introduced by Nova and co-workers (1994,
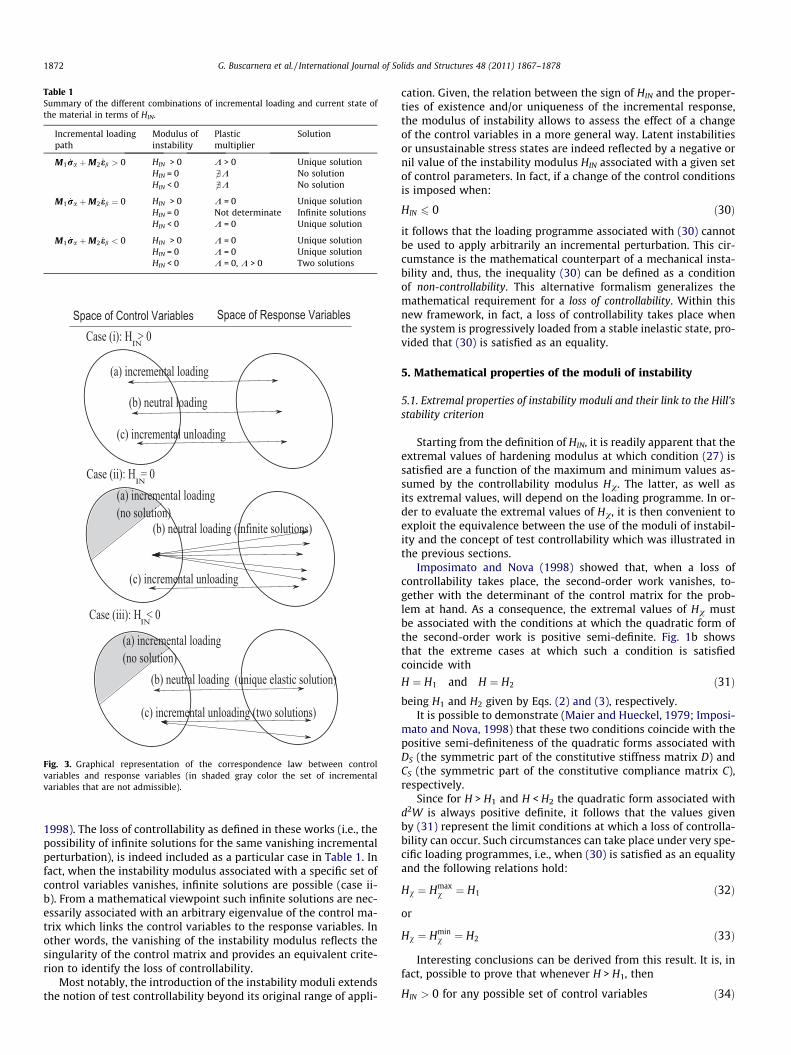
Table 1Summary of the different combinations of incremental loading and current state ofthe material in terms of HIN.
Incremental loadingpath
Modulus ofinstability
Plasticmultiplier
Solution
M1 _ra þM2 _eb > 0 HIN > 0 K > 0 Unique solutionHIN = 0 9=K No solutionHIN < 0 9=K No solution
M1 _ra þM2 _eb ¼ 0 HIN > 0 K = 0 Unique solutionHIN = 0 Not determinate Infinite solutionsHIN < 0 K = 0 Unique solution
M1 _ra þM2 _eb < 0 HIN > 0 K = 0 Unique solutionHIN = 0 K = 0 Unique solutionHIN < 0 K = 0, K > 0 Two solutions
Fig. 3. Graphical representation of the correspondence law between controlvariables and response variables (in shaded gray color the set of incrementalvariables that are not admissible).
1872 G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878
1998). The loss of controllability as defined in these works (i.e., thepossibility of infinite solutions for the same vanishing incrementalperturbation), is indeed included as a particular case in Table 1. Infact, when the instability modulus associated with a specific set ofcontrol variables vanishes, infinite solutions are possible (case ii-b). From a mathematical viewpoint such infinite solutions are nec-essarily associated with an arbitrary eigenvalue of the control ma-trix which links the control variables to the response variables. Inother words, the vanishing of the instability modulus reflects thesingularity of the control matrix and provides an equivalent crite-rion to identify the loss of controllability.
Most notably, the introduction of the instability moduli extendsthe notion of test controllability beyond its original range of appli-
cation. Given, the relation between the sign of HIN and the proper-ties of existence and/or uniqueness of the incremental response,the modulus of instability allows to assess the effect of a changeof the control variables in a more general way. Latent instabilitiesor unsustainable stress states are indeed reflected by a negative ornil value of the instability modulus HIN associated with a given setof control parameters. In fact, if a change of the control conditionsis imposed when:
HIN 6 0 ð30Þ
it follows that the loading programme associated with (30) cannotbe used to apply arbitrarily an incremental perturbation. This cir-cumstance is the mathematical counterpart of a mechanical insta-bility and, thus, the inequality (30) can be defined as a conditionof non-controllability. This alternative formalism generalizes themathematical requirement for a loss of controllability. Within thisnew framework, in fact, a loss of controllability takes place whenthe system is progressively loaded from a stable inelastic state, pro-vided that (30) is satisfied as an equality.
5. Mathematical properties of the moduli of instability
5.1. Extremal properties of instability moduli and their link to the Hill’sstability criterion
Starting from the definition of HIN, it is readily apparent that theextremal values of hardening modulus at which condition (27) issatisfied are a function of the maximum and minimum values as-sumed by the controllability modulus Hv. The latter, as well asits extremal values, will depend on the loading programme. In or-der to evaluate the extremal values of Hv, it is then convenient toexploit the equivalence between the use of the moduli of instabil-ity and the concept of test controllability which was illustrated inthe previous sections.
Imposimato and Nova (1998) showed that, when a loss ofcontrollability takes place, the second-order work vanishes, to-gether with the determinant of the control matrix for the prob-lem at hand. As a consequence, the extremal values of Hv mustbe associated with the conditions at which the quadratic form ofthe second-order work is positive semi-definite. Fig. 1b showsthat the extreme cases at which such a condition is satisfiedcoincide with
H ¼ H1 and H ¼ H2 ð31Þbeing H1 and H2 given by Eqs. (2) and (3), respectively.
It is possible to demonstrate (Maier and Hueckel, 1979; Imposi-mato and Nova, 1998) that these two conditions coincide with thepositive semi-definiteness of the quadratic forms associated withDS (the symmetric part of the constitutive stiffness matrix D) andCS (the symmetric part of the constitutive compliance matrix C),respectively.
Since for H > H1 and H < H2 the quadratic form associated withd2W is always positive definite, it follows that the values givenby (31) represent the limit conditions at which a loss of controlla-bility can occur. Such circumstances can take place under very spe-cific loading programmes, i.e., when (30) is satisfied as an equalityand the following relations hold:
Hv ¼ Hmaxv ¼ H1 ð32Þ
or
Hv ¼ Hminv ¼ H2 ð33Þ
Interesting conclusions can be derived from this result. It is, infact, possible to prove that whenever H > H1, then
HIN > 0 for any possible set of control variables ð34Þ

G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878 1873
This implies that a model would predict the existence of a un-ique solution for any incremental loading path. Conversely, when-ever H < H2, it follows that
HIN < 0 for any possible set of control variables ð35Þ
from which it follows that there are no loading programmes forwhich existence and uniqueness of the incremental response areguaranteed.
The Hill’s stability criterion can be therefore reinterpreted in thelight of these results (Fig. 3). It is indeed possible to envisage threezones according to the value of hardening modulus for the problemat hand (Fig. 4b).
i. A first zone 1 for H > H1, in which unconditional stabilityholds (i.e., existence and uniqueness are guaranteed forany incremental loading path and any control conditions).
ii. A second zone 2 for H2 < H < H1 in which conditional stabilityholds (i.e., stability conditions depend on the control param-eters governed during a given incremental loading path). Inother words, between the limit values H1 and H2, existenceand uniqueness of the incremental response are a functionof the loading programme.
iii. A third zone 3 for H < H2, in which unconditional instabilityholds for any loading programme and control conditions.In other words, either the incremental response does notexist (incremental loading paths) or the solution is notunique (incremental unloading).
According to the value of the hardening modulus, the state ofthe material may pass from one regime of stability to another.The three regimes are conceptually distinguished by the role thatcontrol parameters play within each region. In other words, withinthe three zones it may be possible or not to identify loading pro-grammes that are associated either with a stable or an unstable re-sponse. Under this perspective, the identification of three regimeswith different properties of controllability further clarifies theimportance of the loading programme in the assessment of mate-rial stability.
Fig. 4 explicitly shows that the presence of non-associativity ex-tends the range of hardening moduli at which conditional stabilityholds. It can be proved, in fact, that the first point at which stabilityin the sense of Hill is lost coincides with a value of H = H1 > 0 (i.e.,possible mechanical instabilities can occur even in the hardeningregime). Symmetrically, the last point at which d2WMIN vanishesis attained at H = H2 < Hc. This implies that, before reaching this
d2 WM
IN
H Hardening
Modulus
H = 0
H = H2
H = H1
H = Hc
3 1
2
Fig. 4. (a) Scheme of the variation of d2WMIN as a function of the hardening modulus (the ddescription of the zones of instability.
condition, existence and uniqueness of the incremental responsecan be still guaranteed also within the subcritical softening regime(even if only for very particular loading programmes).
The mathematical properties of the moduli of instability pro-vide an explanation also for the apparent paradox emerging fromFig. 4a. Fig. 4a shows that, when the material is characterized bya severe strain-softening (i.e., when H < H2), d2WMIN takes positivevalues. This leads to the result that, being d2WMIN > 0 despite thedramatic amount of softening, all the incremental loading pathsare supposed to be stable (i.e., they are supposed to satisfy theHill’s stability criterion). This apparent contradiction is clarifiedconsidering that, due to the strategy followed to obtain d2WMIN
in Figs. 2 and 4 (Maier and Hueckel, 1979), plastic admissibilityis violated for any incremental loading path and control condition(unconditional instability). In other words, the positive values ofd2WMIN reported in Fig. 4a are simply a result of an analysis that as-sumed the existence of a plastic response without enforcing all thenecessary constraints for it. For this reason, the values of d2WMIN
have been plotted through a dashed line (Fig. 4a), indicating in thisway that they do not satisfy all the constraints given by Eq. (6).
5.2. Dual families of instability moduli and incremental constitutiverelations
As it has already been observed, a constitutive law is a corre-spondence law between two sets of variables (the control variablesand the response variables). The conventional definition of insta-bility suggested in this work seeks for the conditions at which sucha law is not anymore a one-to-one correspondence. In order to fur-ther clarify this concept, let us consider the following partition ofthe constitutive law:
_ra
_rb
� �¼
Daa Dab
Dba Dbb
� �_ea
_eb
� �ð36Þ
Let us consider, without any loss in generality, a particular formof mixed stress–strain control conditions. It is possible, in fact, torearrange the previous relation by defining the two followingvectors:
_/ ¼_ra
_rb
� �and _w ¼
_ea
_rb
� �ð37Þ
Vectors _/ and _w represent two dual work conjugate vectorswhich could be governed when imposing an incremental perturba-tion. According to the notion of test controllability, the predictedmechanical response will depend on the loading programme that
otted line represents values of d2WMIN violating plastic admissibility); (b) schematic

1874 G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878
has been chosen, and, thus, on the value assumed by the corre-spondent instability modulus. As a result, two dual values of HIN
are associated with the vectors _/ and _w, respectively defined as
H/
IN ¼ H � H/
v ¼ H þe@f@rb
Debb � De
baDeaa�1De
ab
� � @g@rb
ð38Þ
Hw
IN ¼ H � Hw
v ¼ H þe@f@ra
Deaa � De
abDebb�1De
ba
� � @g@ra
ð39Þ
being the instability modulus (38) associated with the control ofvariables _/ and the modulus (39) with the control of variables _w.Thus, the vanishing of either (38) or (39) coincides with the lossof controllability for one of the two dual loading programmes.
The above statements are also reflected by the mathematicalstructure of the incremental relations under mixed stress–straincontrol. Let us assume, for instance, that vector _/ collects the con-trol variables, while the vector _w collects the response variables. Itfollows that
_/ ¼ X _w ð40Þ
where X is the controllability matrix. In order to retrieve the math-ematical expression for X, let us rewrite the generalized elastic law:
_ra
_eeb
( )¼
Deaa De
ab
Deba De
bb
" #_eea
_rb
� �ð41Þ
where the terms Deij can be obtained by rearranging the elastic ma-
trix in Eq. (14). Using (41) it can be shown that the consistencytakes the following form:
eN1 _ea þ eN2 _rb �K H � Hwv
� �¼ 0 ð42Þ
where
N1 ¼@f@ra
Deaa ð43Þ
N2 ¼@f@ra
Deab þ
@f@rb
ð44Þ
In Eq. (42) consistency is enforced by using the incrementalvariables collected in _w. It is readily apparent that (42) is character-ized by the presence of the dual controllability modulus Hw
v . Usingsuch a formalism for the consistency law, and considering theusual plastic flow rule, it follows that
_ra ¼ Deaa
_ea þ Deab
_rb �1
H � Hwv
Dpaa
_ea þ Dpab
_rb
� �ð45Þ
_eb ¼ Deba
_ea þ Debb
_rb �1
H � Hwv
Dpba
_ea þ Dpbb
_rb
� �ð46Þ
where:
Dpaa ¼ De
aaN1 �@g@ra
; Dpab ¼ De
aaN2 �@g@ra
ð47Þ
Dpba ¼ �N1 �
@g@rb
þ DebaN1 �
@g@ra
;
Dpbb ¼ De
baN2 �@g@ra� N2 �
@g@rb
ð48Þ
where the symbol � stands for dyadic product.As a consequence, it follows that the controllability matrix link-
ing _/ and _w takes the following form:
X ¼De
aa Deab
Deba De
bb
" #� 1
H � Hwv
Dpaa Dp
ab
Dpba Dp
bb
" #ð49Þ
The expression above is characterized by the presence of thedual instability modulus Hw
v . Eq. (49) represents a generalizationto mixed stress–strain control conditions of the well known
expression of the elastoplastic constitutive stiffness matrix D thatlinks the stress increment to the strain increment:
D ¼ De � 1H � HC
De @g@r
�� @f
@rDe
�ð50Þ
Eq. (50) is characterized by the presence of HC (which coincideswith the value of Hw
v under pure stress control), and becomes sin-gular when H = 0 (being in that case Hu
v ¼ 0 and HIN = H for stresscontrol conditions). Similarly, considering mixed stress–strain con-trol, the singularity for the control matrix X corresponds with thevanishing of the associated instability modulus H/
IN . Hence, it isthen straightforward to infer that when H ¼ Hu
v :
detðXÞ ¼ 0 ð51Þ
being HIN = 0 at that point.
5.3. Symmetry properties of dual instability moduli
The close link between the dual families of instability moduli isfurther corroborated by the study of their symmetry properties.For this purpose, let us consider a change in the basis of represen-tation for the constitutive law. A convenient formalism involvesthe selection of a space of control variables based on the use of lin-ear combinations of the standard stress and strain rate measures(the general mathematical details of this procedure are illustratedin Appendix).
A particular change of variables enabling a simple derivation ofthe symmetry properties of the instability moduli can be found. Forthis purpose, let us consider the following linear transformations:
_n ¼ TD _r
_g ¼ eT�1D _e
ð52Þ
in which TD is the matrix which allows for the change of basis ofrepresentation and eTD is its transpose. Such a change of referencesystem does not modify the mathematical properties of the consti-tutive law, but allows to change the space of the variables in whichthe incremental constitutive relations are expressed. In this way,any type of stress–strain control can be expressed by using thisnew basis of representation.
Let us further assume to choose a convenient form for matrixTD. If, in fact, TD coincides with the orthogonal matrix which diag-onalizes the elastic constitutive matrix De (this can be assumed tobe always possible under very general assumptions), it follows that
_na
_nb
( )¼
Deaa De
ab
Deba De
bb
" #_gea
_geb
( )ð53Þ
where, being De diagonal under the chosen basis of representation,De
ab and Deba have all terms equal to zero. It is then possible to prove
that
HC ¼ �f@f@n
De @g@n¼ �
e@f@na
Deaa@g@na�e@f@nb
Debb
@g@nb
ð54Þ
Taking into account Eqs. (38) and (39), and obtaining their cor-respondent expression under the newly defined basis of represen-tation, it follows that
H/
v ¼ �e@f@nb
Debb
@g@nb
ð55Þ
Hw
v ¼ �e@f@na
Deaa@g@na
ð56Þ
It is then immediately evident that, independent of the cho-sen partition (i.e., for any set of mixed stress–strain control

G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878 1875
parameters), the sum of any dual pair of hardening moduli is aconstant equal to HC, that is
H/
v þ Hw
v ¼ HC for any choice of _/ and _w ð57Þ
As a consequence, any dual pair of instability moduli is charac-terized by a symmetry respect to HC/2. Such a symmetry is illus-trated in Fig. 5, which qualitatively shows the dependency on thedegree of non-associativity for some notable values of the harden-ing moduli associated with non-controllability conditions. The de-gree of non-associativity is here quantified by means of the angle #between the gradient of the yield function f (in Fig. 5 representedwith the notation grad(f)) and the normal to the plastic potentialg (in Fig. 5 represented with the notation grad(g)).
The above mentioned property points out that the loss for con-trollability of a generic loading programme _/ is always distinctfrom that of its dual counterpart _w, the only exception being thecase in which H/
v ¼ HC=2. In this very particular circumstance, infact, the symmetry property implies that Hw
v ¼ H/
v , and, therefore,both _/ and _w can suffer a loss of controllability, provided thatHw
IN ¼ H/
IN ¼ 0 at the same time. In other words, in this very partic-ular case neither _/ nor _w can arbitrarily be imposed. It is worthnoting that, due to the particular strategy of analysis followed byImposimato and Nova (1998), the possibility of having a simulta-
Hc
H1
H2
Hc/2
Ang
le o
f non
-ass
ocia
tivity
θ
Hardening Modulus H
H1
H2
HC
HC/2
Hχχχχ
ψψψψ Hχχχχ
φφφφ
Fig. 5. (a) Definition of the angle of non-associativity #; (b) variation with # of somerelevant values of hardening modulus.
neous instability was not captured by the original version of thetheory of controllability.
The definition of the dual families of control variables enablesthe mathematical features of the correspondence law to be recon-sidered. In particular, the case in which just one of the dual insta-bility moduli is non positive (for instance H/
IN) differs from the casein which both H/
IN and Hw
IN fulfill Eq. (30). Case (iii) in Fig. 3 may in-deed take two alternative graphical forms, as shown in Fig. 6 (inwhich it is assumed that H/
IN is always smaller than its counterpartHw
IN).When both H/
IN and Hw
IN are non-positive (zone C in Fig. 6), in-deed, the correspondence law cannot be characterized by arbitrarychoices neither for the set of variables _/ nor for _w. In other words,there are incremental vectors belonging both to the set of controlvariables and response variables which cannot be imposed withoutviolating the elastic–plastic constraints. The latter circumstanceshares many similarities with the case of sub-critical softening,that becomes in this theory a particular case corresponding to purestrain control.
Besides illustrating the mathematical elegance hidden by theelastoplastic constitutive equations, such a symmetry conditionrepresents a useful theoretical tool. Given a set of control parame-ters _/ and its associated instability modulus H/
v , it is immediate tocalculate the value of its counterpart Hw
v from (57). In this way it ispossible to have information on the stability of the material when aperturbation is applied through the dual set of variables _w and inferif this loading programme is still controllable. The advantagesprovided by this theoretical insight both for the interpretation ofmodel predictions and the set up of laboratory tests are readilyevident.
6. Conclusions
A theoretical approach has been presented to study mechanicalinstability in elastoplastic materials and to assess the influence oftest control conditions on their mechanical response. The mainpurpose has been to develop an alternative methodology able tomaintain the same features of others well established theories,providing at the same time a more flexible framework of referencefor treating mechanical instability both in the case of strain-hardening and strain-softening. To achieve this goal, the close linkbetween the notions of second-order work, test controllability andexistence/uniqueness of the incremental response has been illus-trated. The new framework allows to extend the notion of test con-trollability beyond its original limits, enforcing in a morefundamental way plastic admissibility and treating the notions ofuniqueness, existence and controllability in the same formal wayboth for the case of strain-hardening and strain-softening.Although the analysis has been conducted from a mathematicalstandpoint, the mechanical implications of the aforementionedconcepts have been illustrated, setting a vision for their futureapplication.
The main conclusions of the paper can be summarized asfollows:
� It has been presented an improved theoretical approach capableof enforcing in a more fundamental way plastic admissibility.The case of mixed stress–strain control conditions has beenconsidered, and it has been demonstrated the link betweenthe singularity of the control matrix governing the incrementalresponse of the system and the loss of definition of the plasticmultiplier. It has been shown, indeed, that the analytical formretrieved for the plastic multiplier depends on the specific load-ing programme, being this a clear mathematical evidence of thecontrol dependency of the material response.

Fig. 6. Schematic description of the correspondence law relating control variables and response variables: (i) H/
IN > 0 and Hw
IN > 0 (zone A; both sets of incremental variables _/
and _w can be arbitrarily imposed); (ii) H/
IN 6 0 and Hw
IN > 0 (zone B; only the set of incremental variables _w can be arbitrarily governed) and (iii) H/
IN 6 0 and Hw
IN 6 0 (zone C;neither set _/ nor _w can be arbitrarily imposed). In shaded gray color the inadmissible combinations of H/
IN � Hw
IN (assuming that H/
IN < Hw
IN) and the loading programmes _/� _w
that cannot be imposed.
1876 G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878
� It has been shown that instability conditions under a specificloading programme can be predicted when a convenient scalarmeasure vanishes, while the existence of the mechanicalresponse associated with incremental loading paths is lostwhenever such an instability index becomes negative. This fam-ily of scalar measures, here called moduli of instability, havebeen defined as the difference between the hardening modulusand a term dependent on control conditions (here called con-trollability modulus). As a consequence, the moduli of instabilityresult to be scalar quantities characterized by a control depen-dent structure.� The new theory establishes a clear link between the notion of
non-controllability under mixed stress–strain loading pro-grammes and the loss of existence and uniqueness of the incre-mental response. Such a conceptual connection has beenexpounded by representing the constitutive relations as a corre-spondence law between two spaces, the space of the controlvariables and the space of the response variables. It has thenbeen illustrated that the possibility to have a one-to-one corre-spondence between these two spaces depends on the particularchoices made for the space of the control variables, i.e., on theloading programme adopted to retrieve the mechanicalresponse of the system. The use of the moduli of instabilityenables the characteristics of this correspondence law to beassessed.� It has been pointed out that the problem of existence and
uniqueness of the incremental response is characterized by aperfect symmetry between the hardening and the softeningregime. In both cases the effect of non-associativity extendsthe boundaries of the region within which a mixed contributionof stress and strain control parameters can be the major causeof instability. The mechanical outcome of these premises is thata loss of controllability (or, more generally a loss of existence forthe incremental response) can be predicted before the classicalfailure locus (i.e., strictly within the so-called hardening
regime). Symmetrically, existence and uniqueness for very par-ticular mixed loading programmes can be guaranteed evenbeyond sub-critical softening (i.e., for values of hardening mod-ulus lower than HC).� Some convenient mathematical properties of the moduli of
instability have been discussed, linking the extremal values ofcontrollability moduli with the Hill’s stability criterion. Thismade it possible to distinguish the circumstances in whichthe stability of the predicted response upon incremental loadingdepends on the control conditions (conditional stability) fromthose in which either it always exist and it is unique for anyloading programme and control conditions (unconditional sta-bility) or it suffers a loss of existence and/or uniqueness forany type of incremental loading path (unconditional instabil-ity). Finally, the symmetry properties of dual families of moduliof instability have been demonstrated. This last result repre-sents a further tool either to interpret the numerical results pro-vided by an elastoplastic constitutive law or to conceive andcontrol laboratory tests in the light of a comprehensive theoret-ical framework.
Acknowledgments
The three authors wish to warmly acknowledge ProfessorRoberto Nova who suggested and guided the first development ofthis paper. This work stems from his original ideas on loss of con-trollability and can be considered as a result of all his enlighteningscientific contributions on this subject. The dramatic illness whichcaught Professor Nova two years ago, against which he is still tire-lessly fighting, has not allowed him to directly contribute to a re-search project that he would have certainly approached with hisusual enthusiasm. These acknowledgements want to testify onceagain how his students and his colleagues miss him and his invalu-able example in guiding and stimulating the scientific research.

G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878 1877
Appendix A. Linear combinations of control parameters
Hereafter, a more general form of loading programme is consid-ered, in which the governed intensive and extensive control vari-ables are linear combinations of the stresses and strainsappearing in Eq. (9). This is a quite common situation in geome-chanics, and it can be encountered in many types of laboratorytests (e.g., in undrained tests, when the sum of principal strainrates is imposed to be zero).
To define the loss of controllability for such loading pro-grammes, the moduli of controllability must be evaluated in aslightly different way. Following the notation proposed by Imposi-mato and Nova (1998), let us consider two sets of generalizedstresses and strains:
_n ¼ Tr _r ðA:1Þ_g ¼ Te _e ðA:2Þ
These quantities must be linked by the work density equation inorder to satisfy the requirement of work conjugacy. As a conse-quence, it holds:
12
d2W ¼ 12
~_r _e ¼ 12
~_n _g ðA:3Þ
from which:
Tr ¼ eTe
� ��1¼ eT�1
e ðA:4Þ
A generalized stress–strain relationship can then be obtained asfollows:
_n ¼ Tr _r ¼ TrD _e ¼ TrDeTr _g ¼ D _g ðA:5Þ
where D is a generalized constitutive stiffness matrix.Starting from these definitions, the consistency condition can be
enforced, using now the generalized stress measures:e@f@na
_na þe@f@nb
_nb � HK ¼ 0 ðA:6Þ
Let us assume to control _na and _gb. Similarly to Eq. (25), a gen-eralized version of the elastic law can be written as
_na
_nb
( )¼
Deaa De
ab
Deba De
bb
" #_gea
_geb
( )ðA:7Þ
from which _nb can be expressed as
_nb ¼ DebaðD
eaaÞ�1 _na þ De
bb � DebaðD
eaa�1De
ab
� �_ge
b ðA:8Þ
Introducing Eq. (A.8) into the consistency condition, and takinginto account that _ge
b ¼ _gb � _gpb and _gp
b ¼ K @g@nb
, the following expres-sion is obtained for the plastic multiplier:
K ¼ 1H � Hv
f@f@n
_ntr ðA:9Þ
It is worth noting that in deriving Eq. (A.9), a similar definitionof trial stress to that given in Eq. (19) has been used. The modulusof controllability is therefore defined in the same way as
HIN ¼ H � Hv ðA:10Þ
A different mathematical expression, however, must be used toobtain the term H⁄, which in this case is defined as
Hv ¼ �e@f@nb
Debb � De
baðDeaaÞ�1De
ab
� � @g@nb
ðA:11Þ
A dual strategy can again be followed, using the generalizedcompliance matrix defined as
_g ¼ TeDeTe ¼ C _n ðA:12Þ
The equivalent controllability modulus can in this case be ex-pressed as
HIN ¼ H � Hv ¼ H �e@f@nb
Cebb�1 @g@nb
ðA:13Þ
It must be noted that all previous derivations are based on con-venient derivatives of the constitutive functions respect to the gen-eralized stress variables. Since constitutive functions are generallydefined in terms of the usual stress measures, a chain rule must beused to obtain yield function and plastic potential gradients interms of n:
@f@n¼ ~T�1
r@f@r
ðA:14Þ
@g@n¼ ~T�1
r@g@r
ðA:15Þ
This results show a purely formal extension of the mathematicaldefinition of instability moduli to more general loading paths. Theserelations will become useful in the following, since they allow toeasily point out some interesting mathematical properties of theinstability moduli.
References
Andrade, J.E., 2009. A predictive framework for liquefaction instability.Gèotechnique, doi:10.1680/geot.7.00087.
Bigoni, D., Hueckel, T., 1991a. Uniqueness and localization – I. Associative and non-associative elastoplasticity. Int. J Solids Struct. 28, 197–213.
Bigoni, D., Hueckel, T., 1991b. Uniqueness and localization – II. Coupledelastoplasticity. Int. J Solids Struct. 28, 215–224.
Borja, R.I., 2006. Condition for liquefaction instability in fluid-saturated granularsoils. Acta Geotechnica 1, 211–224.
Chambon, R., 2005. Some theoretical results about second-order work, uniqueness,existence and controllability independent of the constitutive equation. J. Eng.Math. 52, 53–61.
Darve, F., Chau, B., 1987. Constitutive instabilities in incrementally non linearmodelling. In: Desai, C.S., Gallagher, G.H. (Eds.), Constitutive Laws forEngineering Materials. Elsevier Science, New York, pp. 301–310.
Darve, F., 1994. Liquefaction phenomenon: modelling, stability and uniqueness. In:Arulanandan, K., Scott, R.F. (Eds.), Verification of Numerical Procedures for theAnalysis of Soil Liquefaction Problems. Balkema, Rotterdam, pp. 1305–1319.
Darve, F., Servant, G., Laouafa, F., Khoa, H.D.V., 2004. Failure in geomaterials,continuous and discrete analyses. Comput. Methods Appl. Mech. Eng. 193,3057–3085.
di Prisco, C., Nova, R., 1994. Stability problems related to static liquefaction of loosesand. In: Chambon, R., Desrues, J., Vardoulakis, I. (Eds.), Localisation andBifurcation Theory for Soils and Rocks. Balkema, Rotterdam, pp. 59–72.
di Prisco, C., Matiotti, R., Nova, R., 1995. Theoretical investigation of the undrainedstability of shallow submerged slopes. Géotechnique 45, 479–496.
Hill, R., 1958. A general theory of uniqueness and stability in elastic–plastic solids. J.Mech. Phys. Solids 6, 239–249.
Hueckel, T., Maier, G., 1977. Incremental boundary value problems in the presenceof coupling of elastic and plastic deformations: a rock mechanics orientedtheory. Int. J. Solids Struct. 13, 1–15.
Imposimato, S., Nova, R., 1998. An investigation on the uniqueness of theincremental response of elastoplastic models for virgin sand. Mech. Cohes.-Frict. Mater. 3, 65–87.
Klisinski, M., Mroz, Z., Runesson, K., 1992. Structure of constitutive equations inplasticity for different choices of state and control variables. Int. J. Plast. 3, 221–243.
Maier, G., 1966. Sui legami associati tra+ sforzi e deformazioni incrementali inelastoplasticità. Rend. Ist. Lomb. Accad. Sc. Let. 100, 809–838.
Maier, G., Hueckel, T., 1979. Non-associated and coupled flow-rules ofelastoplasticity for rock-like materials. Int. J. Rock. Mech. Min. Sci. 16, 77–92.
Nicot, F., Darve, F., 2005. On incremental non-linearity in granular media:phenomenological and multi-scale views (Part I). Int. J. Numer. Anal. Meth.Geomech. 29, 1387–1409.
Nicot, F., Darve, F., 2007. A micro-mechanical investigation of bifurcation ingranular materials. Int. J Solids Struct. 44, 6630–6652.
Nicot, F., Darve, F., Khoa, H.D.V., 2007. Bifurcation and second-order work ingeomaterials. Int. J. Numer. Anal. Meth. Geomech. 31, 1007–1032.
Nova, R., 1989. Liquefaction, stability, bifurcations of soil via strain-hardeningplasticity. In: Dembicki, E., Gudehus, G., Sikora, Z. (Eds.), Numerical Methods forthe Localisation and Bifurcation of granular bodies; Proc. Int. Works., Gdansk,TUG, pp. 117–132.

1878 G. Buscarnera et al. / International Journal of Solids and Structures 48 (2011) 1867–1878
Nova, R., 1994. Controllability of the incremental response of soil specimenssubjected to arbitrary loading programmes. J. Mech. Behav. Mater. 5, 193–201.
Nova, R., 2003. The failure concept in soil mechanics revisited. In: Labuz, J.F.,Drescher, A. (Eds.), Bifurcations and Instabilities in Geomechanics. Balkema,Lisse, pp. 3–16.
Sibille, L., Nicot, F., Donzé, F.V., Darve, F., 2007. Material instability in granularassemblies from fundamentally different models. Int. J. Numer. Anal. Meth.Geomech. 31, 457–481.