convolution - rutgers universityeceweb1.rutgers.edu/~gajic/solmanual/slides/chapter6c.pdfconvolution...
TRANSCRIPT

Convolution
Convolution is one of the primary conceptsof linear systemtheory. It gives
the answerto the problem of finding the systemzero-stateresponsedue to any
input—the most important problem for linear systems. The main convolution
theoremstatesthat the response of a system at rest (zero initial conditions) due
to any input is the convolution of that input and the system impulse response. We
havealreadyseenandderivedthis result in the frequencydomainin Chapters3, 4,
and5, hence,the mainconvolutiontheoremis applicableto , and domains,
that is, it is applicableto both continuous-anddiscrete-timelinear systems.
In this chapter,we study the convolutionconceptin the time domain.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–1
6.1 Convolution of Continuous-Time Signals
The continuous-timeconvolutionof two signals � and � is definedby
� ��
� �� �
In this integral is a dummyvariableof integration,and is a parameter.
Before we statethe convolutionproperties,we first introducethe notion of the
signal duration. The durationof a signal � is definedby the time instants �and � for which for every outsidethe interval � � the signalis equalto zero,
that is, � , � � . Signalsthat havefinite durationareoften called
time-limited signals. For example,rectangularandtriangularpulsesaretime-limited
signals,but haveinfinite time durations.
The propertiesof the convolution integral are:
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–2

1) Commutativity
� � � �2) Distributivity
� � � � � � �3) Associativity
� � � � � �4) Duration
Let the signals � and � havethe durations,respectively,definedby the
time intervals � � and � � then
� �� ���� ���
� � � � � � � � � �� �
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–3

5) Time Shifting
Let � � . Then,convolutionsof shiftedsignalsaregiven by
� � � �� � � �
� � � � � �
6) Continuity
This propertysimply statesthat the convolutionis a continuousfunction of the
parameter . The continuity propertyis useful for plotting convolutiongraphsand
checkingobtainedconvolution results.
Now we give someof the proofsof thestatedconvolutionproperties,which are
of interest for this class.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–4

Property1) canbe provedby introducingthe changeof variablesin the convo-
lution integral as . This leadsto
� �����
� ��
���� � � �
Whichof thetwo formsof theconvolutionintegralshouldwechoose?Definitely,
the one that requireslesscomputations.For example,while convolving���
and we may useeither of the integrals����
������� � � ����
� �
but the first integral requireslesscomputationaleffort than the secondone. Thus,
the better choice is to use the first integral.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–5

Theproof of Property2) follows from thewell knownintegraladditionproperty
! " #$
% $! " #
$
% $! "
$
% $! #
! " ! #Property 4) can be verified by examining the integration limits for the case
when both signals are time-limited. It can be observedthat the signals !and " overlap only in the interval ! " ! " , hencethe
convolutionis equalto zero outsideof this time interval.
The proof of Property5) follows directly from the definition of the convolution
integral. This propertyis usedto simplify the graphicalconvolutionprocedure.
The proofs of Properties3) and 6) are omitted.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–6

Example 6.1: Considerthe convolutionof the delta impulse(singular)signal
and any other regular signal &
' &Basedon the sifting propertyof the delta impulsesignalwe concludethat
Example 6.2: We havealreadyseenin the contextof the integral propertyof
the Fourier transformthat the convolution of the unit step signal with a regular
function (signal) producesfunction’s integral in the specifiedlimits, that is&
' &
(
' &Note that for .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–7

Example 6.3: Considerthe convolutionof )�* and
)�*+
) +)-,.*/)�021
+
) +) 0
We will evaluateboth integralsto showthedifferencein thecomputationsrequired.
The first convolution integral produces
)�* )�* *) +
0
)�* *
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–8

The evaluationof thesecondintegralrequiresfirst anexpansionof
term, that is34
5 634
5 6
which gives 34
5 634
5 6
5�7
Thus, both convolution integrals produce the same result, but the first one is
obviously lesscomputationallyinvolved.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–9

6.1.1 Graphical Convolution
Thegraphicalpresentationof theconvolutionintegralhelpsin theunderstandingof
every stepin the convolutionprocedure.According to the definition integral, the
convolutionprocedureinvolves the following steps:
Step 1: Apply the convolutiondurationpropertyto identify intervalsin which
the convolution is equal to zero.
Step 2: Flip abouttheverticalaxisoneof thesignals(theonethathasa simpler
form (shape)since the commutativityholds), that is, representone of the signals
in the time scale .
Step 3: Vary the parameter from to , that is, slide the flipped signal
from the left to the right, look for the intervals where it overlapswith the other
signal,andevaluatethe integralof the productof two signalsin the corresponding
intervals.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–10

In the abovestepsonecanalsoincorporate(if applicable)the convolutiontime
shifting propertysuchthat all signalsstart at the origin. In sucha case,after the
final convolutionresult is obtainedthe convolutiontime shifting formula shouldbe
appliedappropriately.In addition,theconvolutioncontinuitypropertymaybeused
to checkthe obtainedconvolutionresult,which requiresthat at the boundariesof
adjacentintervalstheconvolutionremainsa continuousfunctionof theparameter .
Wepresentseveralgraphicalconvolutionproblemsstartingwith thesimplestone.
Example 6.4: Considertwo rectangularpulsesgiven in Figure6.1.
f1(t)
f2(t)
t t0 3 0 1
2
1
Figure 6.1: Two rectangular signals
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–11

Since the durationsof the signals 8 and 9 are respectivelygiven by
8 8 and 9 9 , we concludethat the convolutionof these
two signalsis zero in the following intervals (Step1)
8 9 8 98 9 8 9
Thus,we needonly to evaluatethe convolutionintegral in the interval .
In the secondstep,we flip aboutthe verticalaxis thesignalwhich hasa simpler
shape.Sincein this caseboth signalsare rectangularpulsesit is irrelevantwhich
one is flipped. Let us flip 9 . Note that the convolution is performedin the
time scale . In Figure6.2 we presentthe signals 8 and 9 . Figure6.2
correspondsto the convolution for .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–12
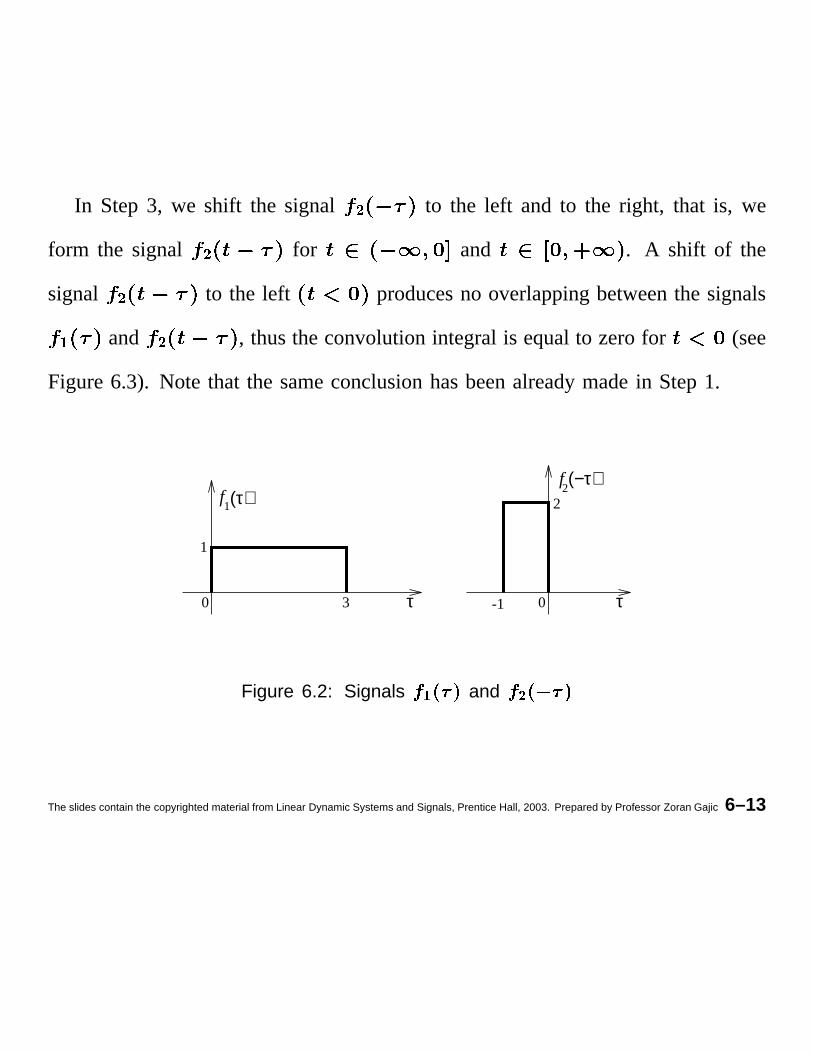
In Step3, we shift the signal : to the left and to the right, that is, we
form the signal : for and . A shift of the
signal : to the left producesno overlappingbetweenthe signals
; and : , thustheconvolutionintegralis equalto zerofor (see
Figure6.3). Note that the sameconclusionhasbeenalreadymadein Step1.
f2(−τ)
0 3
1
f1(τ)
τ 0 τ
2
-1
Figure 6.2: Signals <=?>A@CB and <EDF>HGI@CB
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–13

f1(τ)
-1+ t
0 3
1
τ
0 τ
f2
t
(t-τ)
Figure 6.3: Signals J KMLANPO and JEQRLTS�U NVOXWYS[Z \
Let us start shifting the signal ] to the right ( ). Considerfirst
the interval (seeFigure 6.4).
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–14

f1(τ)
f2(t-τ)
-1+ t
0 3
1
τ
τ0
t
t
1
1
Figure 6.4: Signals ^_M`AaPb and ^dc�`fehg aPbjilknm eom p
It can be seenfrom Figure 6.4 that in the interval from zero to the signals
overlap,hencetheir product is different from zero in this interval, which implies
that the convolution integral is given by
q rst
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–15

By shifting the signal u further to the right, we get the same“kind of
overlap” for , seeFigure 6.5.
f1(τ)
f (t-τ)2
t-1
t-10 3
1
τ
τt
t
2
0 31
1
Figure 6.5: Signals vwMxAyPz and vd{�xf|h} yPzj~���� |o� �Fromthis figurewe seethat theactualconvolutionintegrationlimits arefrom
to , that is
� ��
���-�
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–16

By shifting � further to the right, for , we get the situation
presentedin Figure 6.6.
t-1
t-1
f1(τ)
4
4
f2(t-τ)
0 3
1
τ
0 τt
t
1 3
2
Figure 6.6: Signals ��M�A�P� and �d���f�h� �P�j�l�n� �o� �In this interval, the convolution integral is given by
� ��
�/�-�For , the convolutionis equalto zeroas determinedin Step1. This can
be justified by the fact that the signals � and � do not overlap for
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–17

, that is, their product is equal to zero for , which implies that the
correspondingintegral is equalto zero in the sameinterval, seeFigure6.7.f1(τ)
f (t-τ)2
t-1 t
0 3
1
2
0 3
τ
τ
Figure 6.7: Signals � �M�A�P� and �E R�T¡�¢ �V�X£Y¡[¤ ¥In summary,the convolutionof the consideredsignalsis given by
¦ §
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–18

Note that from the convolution continuity property, the convolution signal
obtainedis a continuousfunction of . This canbe easilycheckedasfollows. For
the expression produceszero. At we seethat ,
also for we have , and finally for we
get . Thus the function obtained, ¨ © , is a
continuousfunction of the parameter .
Example 6.5: Let us convolvethe signalsrepresentedin Figure6.8.
f1(t) f (t)
2
t t0 1 2
2
210
2
-t +2
Figure 6.8: Two signals: rectangular and triangular pulses
Sinceboth signalshave the duration intervals from zero to two, we conclude
that the convolutionintegral is zero for and .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–19

In the next step we flip about the vertical axis the rectangularsignal since it
apparentlyhasa simplershape,seeFigure6.9a. In Step3, we slide the rectangular
signal to the right for , Figure6.9b,and for , Figure6.9c.
t -2
f1(t−τ)
f1(t−τ)
t=0
<0 <2t
<2 <4t
τ
τ
τ
f
-2
1(−τ)
2t0
0
-2
0 2 4t
(a)
(b)
(c)
-2+t
Figure 6.9: Convolution procedure for signals in Example 6.5
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–20

The convolutionintegralin thesetwo intervals,evaluatedaccordingto informa-
tion given in Figures6.9b and 6.9c, is respectivelygiven by
ª «¬
«
ª ««
¬�®�««
In summary,we have obtained
ª « « «
It canbeeasilycheckedthattheobtainedconvolutionresultrepresentsa continuous
function of the parameter .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–21

Example 6.6: Wenowconsidertheslightly moredifficult problemof convolving
two signalswith triangularshapes,aspresentedin Figure6.10. Notethatthesignals
arerepresentedin the time scale . The problemis moredifficult in the sensethat
we mustflip abouttheverticalaxisoneof thesetwo triangularlyshapedsignalsand
find its analyticalexpression.The remainingpart of the problem is the standard
convolution technique.
f2(τ )f
1(τ )
ττ
1
0 1 0 1
−τ+1τ1
Figure 6.10: Two triangularly shaped signals
Let usflip abouttheverticalaxis thesignal ¯ . Theflippedsignalfor
is presentedin Figure 6.11a.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–22

f2(t−τ)
f2(t−τ)
f2(−τ)
τ+1−t
-1t
<1<0 t
<2<1 t
t=0
τ
τ
10
1
t
-1
-1 0
τ+1
t
τ
0
2
(a)
(b)
(c)
-1+t
Figure 6.11: Convolution procedure for signals in Example 6.6
Note its new analyticalexpression,now given by ° . From the
convolutiondurationproperty,we concludethat the convolution is equal to zero
for and . Thus,we haveto work only in the interval .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–23

Considerthe interval . In this interval, thesignal ± is given
by ± , seeFigure11.b. Sincethesignal ² overlapswith
the signal ± in the interval from zero to , the convolutionis given by
² ±³´
µ ±
For , the signal ± , presentedin Figure6.11c,overlapswith
the signal ² in the interval from to . Here,theconvolutionis givenby
² ±²
³/¶ ²µ
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–24
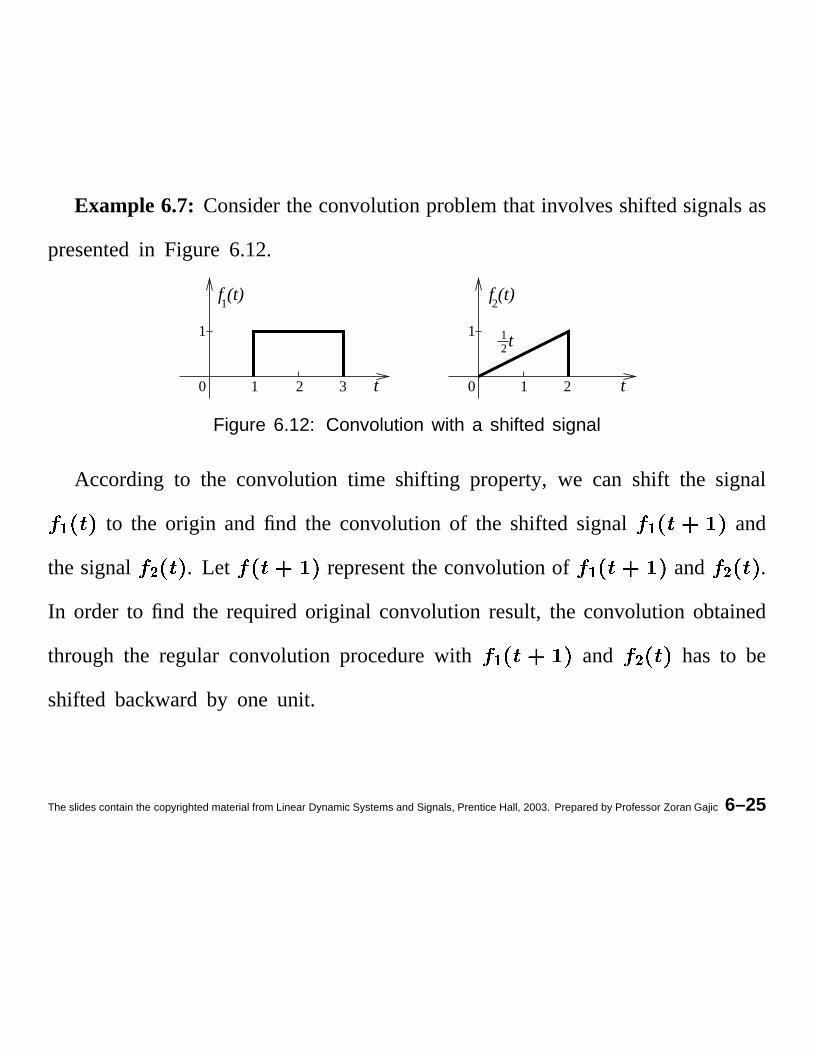
Example 6.7: Considertheconvolutionproblemthat involvesshiftedsignalsas
presentedin Figure 6.12.
211
0 2 0
1
1 21 3
f2
t
(t)
tt
f1(t)
Figure 6.12: Convolution with a shifted signal
According to the convolution time shifting property, we can shift the signal
· to the origin and find the convolutionof the shifted signal · and
the signal ¸ . Let representthe convolutionof · and ¸ .
In order to find the requiredoriginal convolutionresult, the convolutionobtained
through the regular convolution procedurewith · and ¸ has to be
shifted backwardby one unit.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–25

However,we can convolve thesetwo signal without applying the convolution
time shifting property as demonstratedbelow. Since the time durationsof these
signals are respectivelygiven by ¹ ¹ and º º , we
concludethat the correspondingconvolutionis equalto zero for ¹ ºand ¹ º .
Let us flip aboutthe vertical axis the rectangularsignal ¹ , Figure6.13a.
f1(t−τ)
f1(t−τ)
f1(−τ)
τ
1
-3 -1 0
<3<1 t
t=0
<3 <5t
τ
τ-1
1
-1-2
0 1 2 3
0
t
t
(c)
(a)
(b)
t
tt
-1
-3 -1
Figure 6.13: Convolution process for signals in Example 6.7
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–26

In the interval , the convolutionis given by (seeFigure6.13b)
» ¼½/¾-»¿
¼
In the interval , we havefrom Figure 6.13c
» ¼¼
½/¾�À
In the next sectionwe apply the convolutionformula to linear continuous-time
invariantsystemsandshowthat the systemresponseto any input is given in terms
of theconvolutionintegral. To thatend,we will usetheconceptsof systemtransfer
function andsystemimpulseresponseintroducedin Chapters3 and4.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–27

6.2 Convolution for Linear Continuous-Time Systems
Consider the problem of finding the responseof a systemat rest (zero initial
conditions)due to any input, say . In the previouschapterson the frequency
domaintechniques,we haveseenthat every linear systemis characterizedby the
systemtransferfunction and/orby the systemimpulseresponse.The problemthat
we are facedwith is symbolically presentedin Figure 6.14.
f(t) Linear SystemH(s), h(t)
y (t)=?zs
I.C.=0
6.14: System response due to an arbitrary input
Recall that . We assumethat the systeminitial conditionsare
zero (systemat rest) and that is causal( ). Hence,we are
interestedin finding the system zero-state response for due to the input
signal applied to the systemat .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–28

Since the systemimpulse responseis known, we do know the answerto the
systemimpulseresponseproblem,which is symbolicallypresentedin Figure6.15.
If we introduce to denotethe systemaction (systemoperation)on the known
input we will have
or similarly, by assumingtime invariance
Á Á
Note that the linear systemaction is performedin the time scale .
o) o)(t-tδ h(t-tLinear System
h(t), I.C.=0
6.15: System response due to the impulse delta function
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–29

We can presentany input signal in termsof the delta impulsesignal as
(seeExample6.1) Â
à ÂThis follows from the sifting propertyof the impulsedelta function and from the
definition of the convolution integral.
Applying the linear systemaction to the input , we get
ÄRÅÂ
à ÂÂ
à ÂÂ
à Â
This formula establishesin the time domainthe most fundamentalresult of linear
systemtheory,which can be statedin the following theorem.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–30

Theorem 6.1 The response of a continuous-time linear system at rest (zero-state
response) due to any input is the convolution of that input and the system impulse
response.
The resultof the abovetheoremis symbolicallypresentedin Figure6.16.
Linear System y (t)=f(t) * h(t)f(t) zs
h(t), I.C.=0
6.16: Zero-state system response is the convolution of
the system input and the system impulse response
Note that the obtainedzero-stateresponseconvolutionformula
ÆRÇÈ
É Ècan be representedas a sum of three integrals
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–31

ÊRËÌ
Í�Î
ÏÌ
ÎÏ
Since for (causalinput signal), the first integral is equal to
zero. In the third integral, the integrationis performedin the region where
(causallinear system),hence,the third integral is also equal to
zero. Thus, we are left with
ÊRËÏÌ
which producesthezero-statesystemresponseat time dueto aninput signal .
By introducinga changeof variableas , it canbe easilyshownthat
ÊRËÏÌ
ÏÌ
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–32

Example 6.8: Given a linear dynamicsystemrepresentedbyÐÐ
Ñ ÐHÒ Ñ Ñ
Its transferfunction and the impulseresponseare given by
Ñ Ò Ñ Ó Ò
The systemzero-stateresponsedue toÑ ÐHÒ
is
ÔFÕÒÖ
ÒÖ
Ñ × Ñ ÓØ× Ñ ÐMÙ.Ò Ñ × Ú
Ñ ÐHÒÒÖ
× Ñ × Ñ Ò Ñ Ó Ò
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–33

Example 6.9: Assumethat the samesystemfrom Example6.8 is driven by
anotherexternalforcing function, for example . In this case,
we need only evaluatethe correspondingconvolution integral since the system
impulse responseis alreadyknown
ÛRÜÝÞ
ÝÞ
ß�à Ý ß�á2â ßäãRà Ý ß á â
ß ÝÝÞ
á ß ã ÝÝ
ÞãØá
Using the table of integrals,we obtain
ÛRÜ ß Ý ß ã Ý
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall, 2003. Prepared by Professor Zoran Gajic 6–34