coordination control of multiple mobile robots -...
TRANSCRIPT

Coordination Controlof Multiple Mobile Robots
Filippo Arrichiello
webuser.unicas.it/arrichiello
Universita degli Studi di Cassino
PHILOSOPHIAE DOCTOR in
Electrical and Information Engineering
November 2006
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 1/31

Outline
→ Introduction on Multi-Robot Systems
→ The Null-Space-based Behavioral control (NSB)
→ NSB for the control of a team of grounded mobile robots
→ NSB for the control of a fleet of marine surface vessels
→ NSB for the control of a team of mobile antennas
→ Conclusions
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 2/31

Motivations
→ Increasing the mission efficiency
→ Performing tasks not executable by a single robot
→ Tolerance to possible vehicles’ faults
→ Increasing the flexibility of tasks’ execution
→ Advantages of distributed sensing and actuation
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 3/31

Applications
→ Explorations
→ Box-pushing
→ Localization and Mapping
→ Rescue Operations
→ Military Tasks
→ Entertainment (e.g., Robocup)
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 4/31

Vehicles’ typologies
→ Grounded Mobile Robots
→ Marine robots
→ Aerial Vehicles
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 5/31

Approcci comportamentali
→ Biological Inspiration
→ Making the robots
behave like animals
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 6/31

Behavioral approaches
Composition of the behaviors:
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 7/31

Behavioral approaches
Composition of the behaviors:
Competitive approaches selective activation of the behaviors
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 7/31
Behavioral approaches
Composition of the behaviors:
Competitive approaches selective activation of the behaviors
Cooperative approaches the behaviors are combined with proper weights
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 7/31

Behavioral approaches
Composition of the behaviors:
Competitive approaches selective activation of the behaviors
Cooperative approaches the behaviors are combined with proper weights
Null-Space-Based approach Following the task priority inverse kinematics, a
hierarchy-based technique is adopted based on null-space projection
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 7/31

Behavioral approaches
Composition of the behaviors:
Competitive approaches selective activation of the behaviors
Cooperative approaches the behaviors are combined with proper weights
Null-Space-Based approach Following the task priority inverse kinematics, a
hierarchy-based technique is adopted based on null-space projection The
NSB behavioral control differs from the other behavioral approaches in
the way it combines multiple behaviors
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 7/31

NSB control
→ The mission is decomposed in elementary behaviors or tasks
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 8/31

NSB control
→ The mission is decomposed in elementary behaviors or tasks
→ For each elementary behavior a task function is properly defined
σ = f(p1, . . . ,pn)
σ =n∑
i=1
∂f(p)
∂pi
vi = J(p)v
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 8/31

NSB control
→ The mission is decomposed in elementary behaviors or tasks
→ For each elementary behavior a task function is properly defined
σ = f(p1, . . . ,pn)
σ =n∑
i=1
∂f(p)
∂pi
vi = J(p)v
and a motion reference command to each vehicle is elaborated
vd = J†(σd + Λσ
)σ = σd−σ
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 8/31

NSB: Merging different tasks
→ To simultaneously handle different, eventually conflicting, tasks the NSB
adopts a singularity-robust task priority inverse kinematics technique
vd = J†p
(σp,d + Λpσp
)
︸ ︷︷ ︸+
(I − J†
pJp
)
︸ ︷︷ ︸J†
s
(σs,d + Λsσs
)
︸ ︷︷ ︸primary null-Space secondary
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 9/31

NSB: Merging different tasks
→ To simultaneously handle different, eventually conflicting, tasks the NSB
adopts a singularity-robust task priority inverse kinematics technique
vd = J†p
(σp,d + Λpσp
)
︸ ︷︷ ︸+
(I − J†
pJp
)
︸ ︷︷ ︸J†
s
(σs,d + Λsσs
)
︸ ︷︷ ︸primary null-Space secondary
→ Three-task example:
vi = J†i
(σi,d + Λiσi
)(i = 1, 2, 3)
vd = v1 +(I − J
†1J1
) [v2 +
(I − J
†2J2
)v3
]
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 9/31
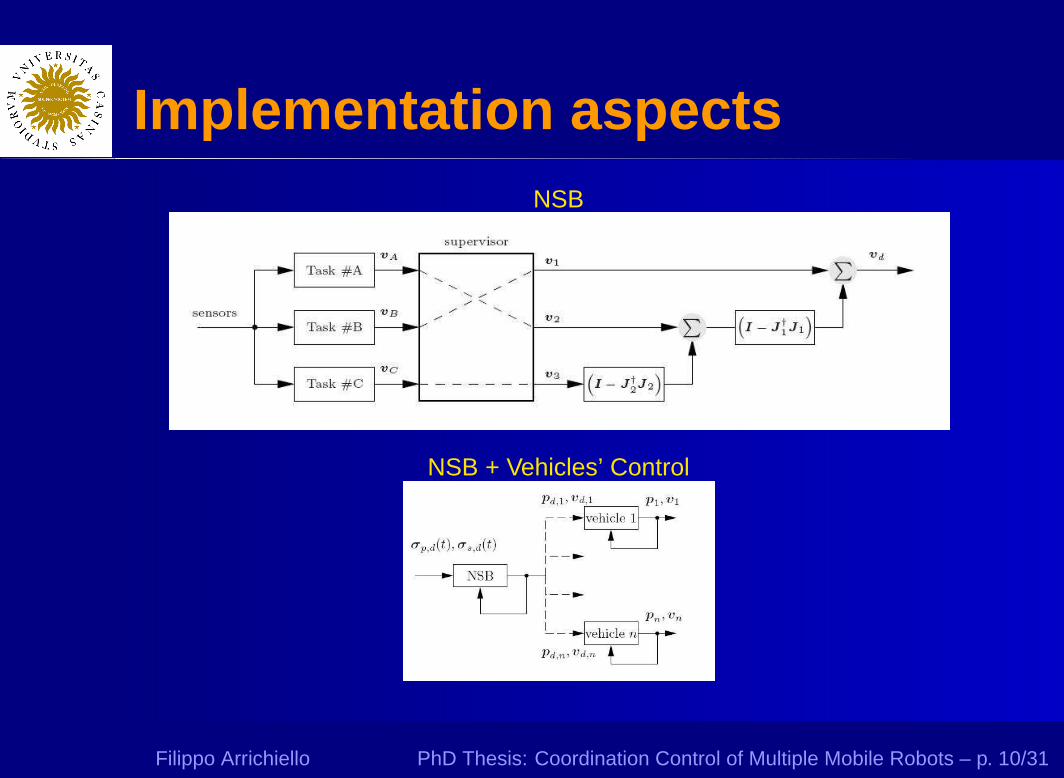
Implementation aspectsNSB
NSB + Vehicles’ Control
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 10/31

Multi-robot: elementary behaviors
Definition of the task functions: “Barycenter”
σb = f b (p1, . . . , pn) =1
n
n∑
i=1
pi
σb =n∑
i=1
∂f b (p)
∂pi
vi = J b (p) v
J b =1
n
1 0
0 1. . .
1 0
0 1
J
†b = nJT
b
vb = J†b
(σb,d + Λbσb
)
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 11/31
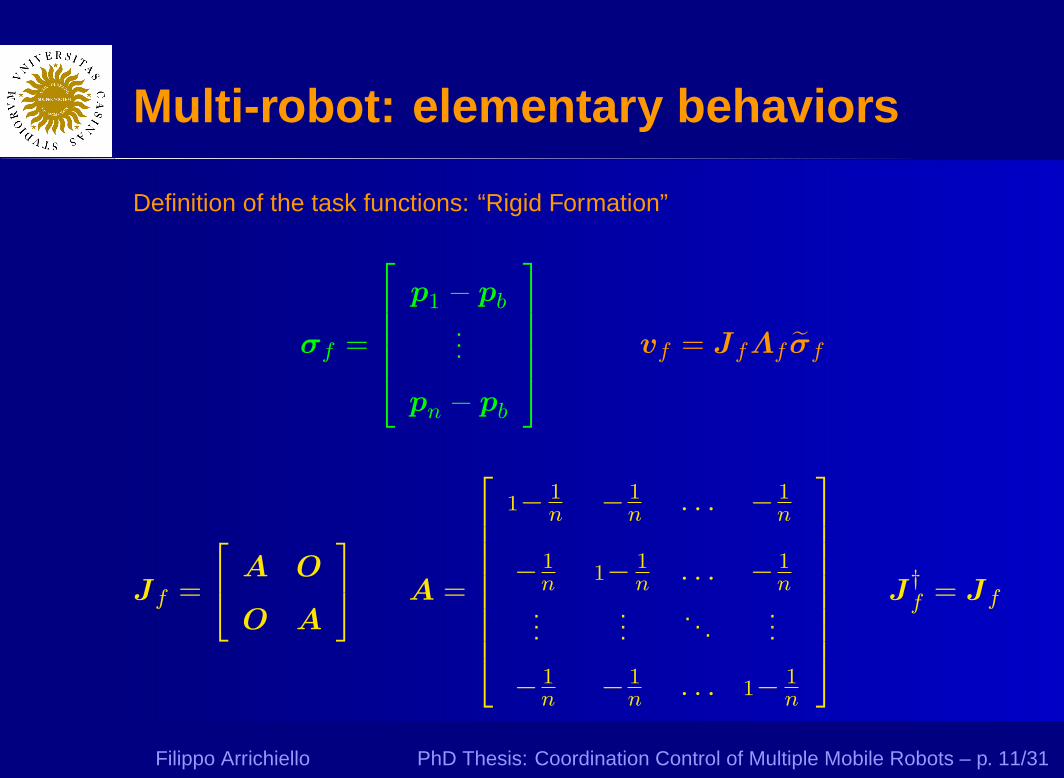
Multi-robot: elementary behaviors
Definition of the task functions: “Rigid Formation”
σf =
p1 − pb
...
pn − pb
vf = JfΛf σf
Jf =
A O
O A
A =
1− 1
n− 1
n. . . − 1
n
− 1
n1− 1
n. . . − 1
n
......
. . ....
− 1
n− 1
n. . . 1− 1
n
J†f = Jf
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 11/31

Multi-robot: elementary behaviors
Definition of the task functions: “Obstacle Avoidance”
The obstacle avoidance task function is built individually to each vehicle, i.e., it
is not an aggregate task function
σo = ‖p − po‖ σo,d = d Jo = rT J†o = r
po: obstacle position
d: safe distance
r=p−p
o
‖p−po‖ : unit vector
of the obstacle-to-vehicle direction
vo = J†oλoσo = λo
(d − ‖p−po‖
)r
N (Jo) = I − rrT
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 11/31

Team of wheeled mobile robots
→ Platoon of 7 Khepera II
→ Differential-drive mobile robots
→ Each robot has a Bluetooth turret
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 12/31

Experimental set-up
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 13/31

ExperimentsMission 1: Obstacle-Barycenter-Linear Formation
Movie 1
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 14/31

ExperimentsMission 1: Mission steps
0 50 100 150−50
0
50
100
150
t = 27.58
0 50 100 150−50
0
50
100
150
t = 28.72
0 50 100 150−50
0
50
100
150
t = 29.93
0 50 100 150−50
0
50
100
150
t = 31.06
0 50 100 150−50
0
50
100
150
t = 32.29
0 50 100 150−50
0
50
100
150
t = 33.43
0 50 100 150−50
0
50
100
150
t = 34.53
0 50 100 150−50
0
50
100
150
t = 36.1
Movie 1
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 14/31

ExperimentsMission 1: Barycenter and rigid formation task function errors
0 10 20 300
20
40
60
80
100
[s]
[cm
]
0 10 20 300
20
40
60
80
100
[s]
[cm
]Movie 1
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 14/31

ExperimentsMission 2: Obstacle-Barycenter-Circular Formation
Movie 2
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 15/31

ExperimentsMission 2: Mission steps
t = 0 t = 5.9 t = 12.17 t = 18.49
t = 24.99 t = 31.19 t = 37.56 t = 43.46
t = 49.58 t = 55.69 t = 61.83 t = 67.84
Movie 2
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 15/31
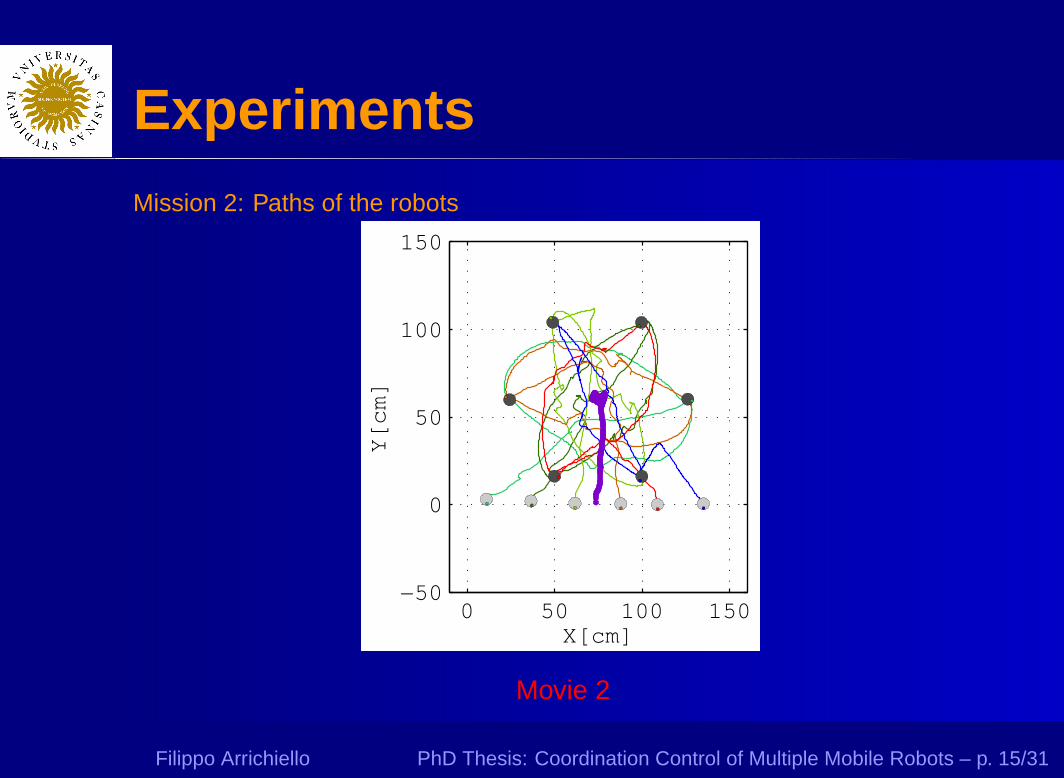
ExperimentsMission 2: Paths of the robots
0 50 100 150−50
0
50
100
150
X[cm]
Y[c
m]
Movie 2
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 15/31
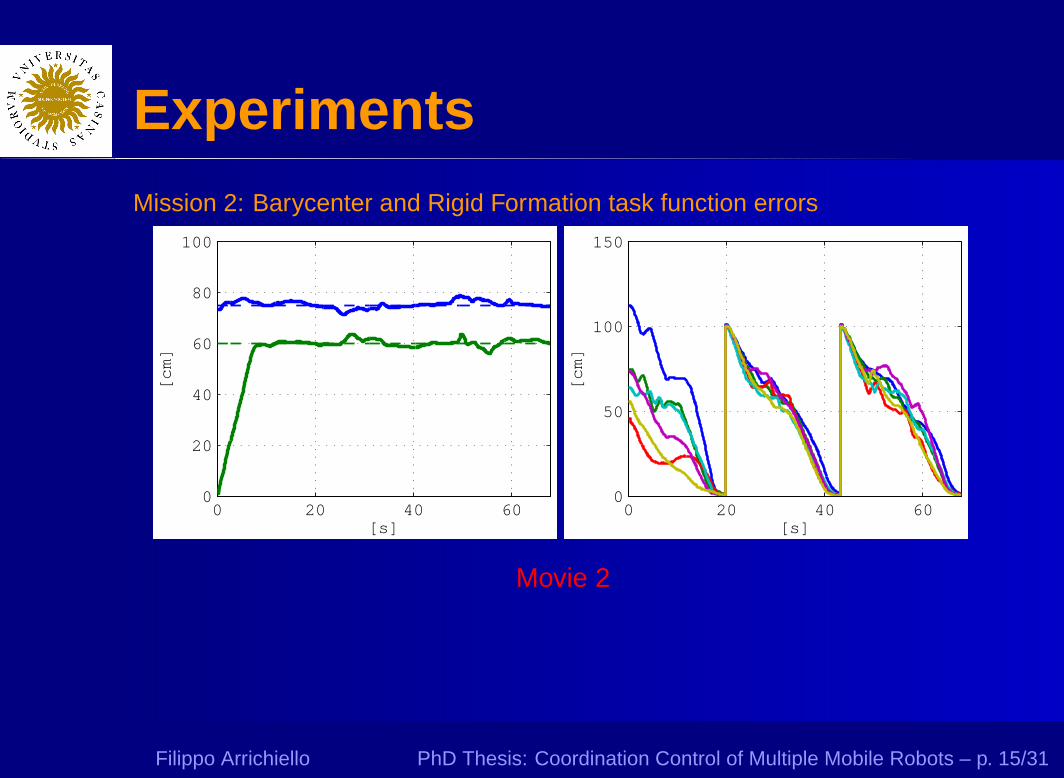
ExperimentsMission 2: Barycenter and Rigid Formation task function errors
0 20 40 600
20
40
60
80
100
[s]
[cm
]
0 20 40 600
50
100
150
[s]
[cm
]Movie 2
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 15/31

ExperimentsMission 3: Escorting/Entrapment mission
Movie 3
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 16/31

Feet of marine vessels
→ Navigation in formation
→ Autonomous navigation systems
→ Harbor operations
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 17/31

Guidance system
→ Supervisor: Null-Space-based Behavioral control
→ Maneuvering control
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 18/31

Single-vessel modelling
Kinematics
n
e
U
ψ
u
v
χ
β{B}
ν = (u v r )T linear and
angular velocity in surge-sway-
yaw BODY components
η = (n e ψ )T position and
orientation in the NE-plane
η=R(ψ) ν
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 19/31

Single-vessel modelling
Dynamics
Mν + N (ν)ν = τ + RT(ψ) w
Inertial Parameters
Hydrodynamic Effects
Environmental Disturbances:
- Wind
- Waves
- Current
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 20/31

Single-vessel modelling
Actuation System
→ Two main thrusters
→ One tunnel thruster (for low-speed maneuvers)
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 21/31

Single-vessel modelling
Actuation System
Main Propellers
Tunnel thrusters
F1
F2
F3
{BODY }
0 1 2 30
1
2
3
4
x 104 b
u
τ2,m
ax
Fully-Actuated Under-Actuated
τ =
F1 + F2
F3
τ3(F1, F2, F3)
τ =
F1 + F2
0
τ3(F1, F2)
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 21/31

Maneuvering control
τ = Mα + Nα − RT w − hk1z1 − K2z2
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 22/31

Maneuvering control
τ = Mα + Nα − RT w − hk1z1 − K2z2
α =
UNSB cos(βNSB)
α2
ψNSB−z1
βNSB = χNSB − ψ
α2 =
{UNSB sin(βNSB) [FA]
tale che τ2 =0 [UA]
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 22/31

Maneuvering control
τ = Mα + Nα − RT w − hk1z1 − K2z2
α =
UNSB cos(βNSB)
α2
ψNSB−z1
βNSB = χNSB − ψ
α2 =
{UNSB sin(βNSB) [FA]
tale che τ2 =0 [UA]
z1 = ψ−ψNSB k1 > 0
z2 = ν−α K2 > 0
˙w = ΓR z2 Γ =Γ T > 0
h =
0
0
1
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 22/31

Case studies
Mission 1
−200 0 200 400 600 800 1000−500
−400
−300
−200
−100
0
100
200
300
400
500
e[m]
n[m
]
−200 0 200 400 600 800 1000−500
−400
−300
−200
−100
0
100
200
300
400
500
e[m]
n[m
]
−200 0 200 400 600 800 1000−500
−400
−300
−200
−100
0
100
200
300
400
500
e[m]
n[m
]
−200 0 200 400 600 800 1000−500
−400
−300
−200
−100
0
100
200
300
400
500
e[m]
n[m
]
Simulation 1
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 23/31
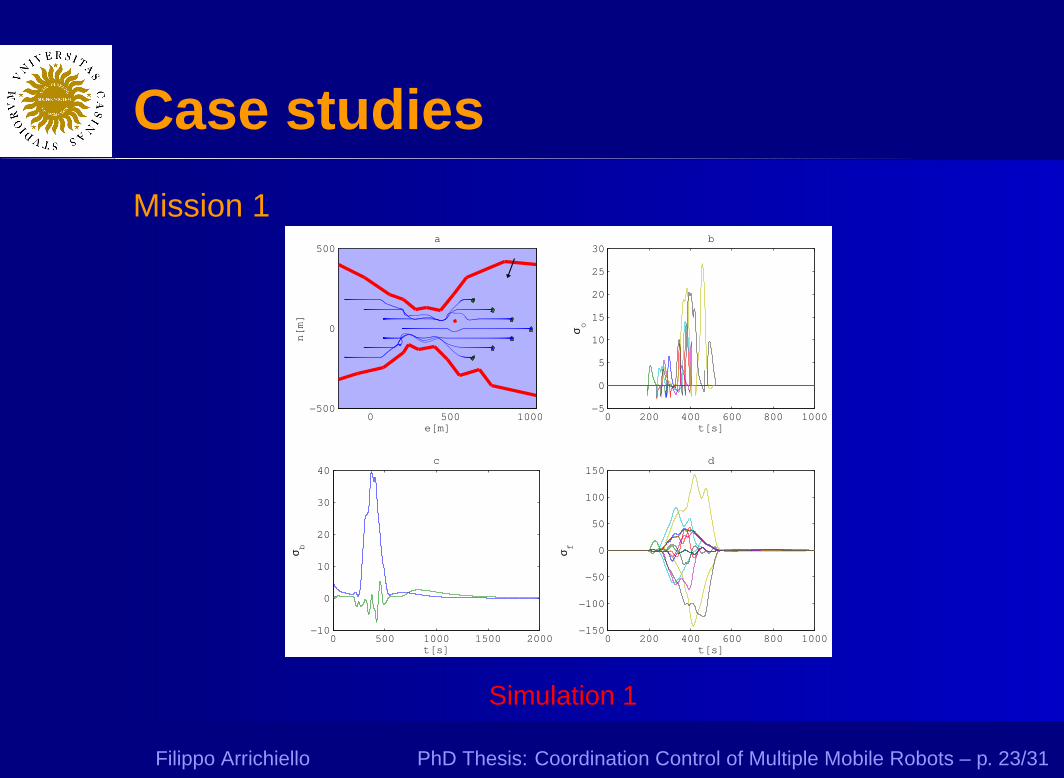
Case studies
Mission 1
0 200 400 600 800 1000−150
−100
−50
0
50
100
150
σ f
t[s]
d
0 500 1000 1500 2000−10
0
10
20
30
40
σ b
t[s]
c
0 200 400 600 800 1000−5
0
5
10
15
20
25
30
σ o
t[s]
b
0 500 1000−500
0
500
e[m]
n[m
]
a
Simulation 1
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 23/31
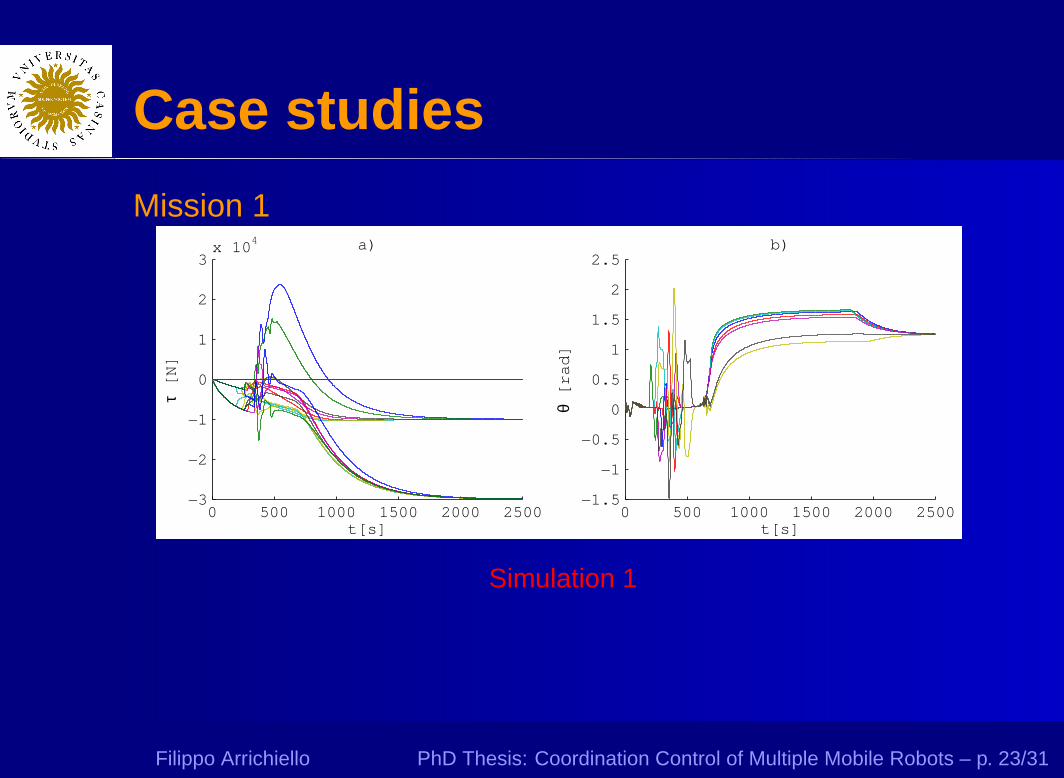
Case studies
Mission 1
0 500 1000 1500 2000 2500−3
−2
−1
0
1
2
3x 10
4
t[s]
τ [N
]
a)
0 500 1000 1500 2000 2500−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
t[s]
θ [r
ad
]
b)
Simulation 1
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 23/31

Case studies
Mission 2
−200 0 200 400 600 800 1000−500
−400
−300
−200
−100
0
100
200
300
400
500
e[m]
n[m
]
−200 0 200 400 600 800 1000−500
−400
−300
−200
−100
0
100
200
300
400
500
e[m]
n[m
]
−200 0 200 400 600 800 1000−500
−400
−300
−200
−100
0
100
200
300
400
500
e[m]
n[m
]
−200 0 200 400 600 800 1000−500
−400
−300
−200
−100
0
100
200
300
400
500
e[m]
n[m
]
Simulation 2
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 24/31

Case studies
Mission 2
0 200 400 600 800 1000−60
−40
−20
0
20
40
60
σ f
t[s]
d
0 500 1000 1500 2000−20
−15
−10
−5
0
5
10
15
σ b
t[s]
c
0 200 400 600 800 10000
5
10
15
20
25
30
σ o
t[s]
b
0 500 1000−500
0
500
e[m]
n[m
]
a
Simulation 2
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 24/31

Case studies
Mission 2
0 500 1000 1500 2000 2500−3
−2
−1
0
1
2
3
4
5x 10
4
t[s]
τ [N
]
a)
0 500 1000 1500 2000 2500−3
−2
−1
0
1
2
t[s]
θ [r
ad
]
b)
Simulation 2
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 24/31

Team of mobile antennas
base station
mobile antennas
agent
→ Mobile Ad-hoc NETworks (MANET)
→ To guarantee coverage of an autonomous vehicle
→ Platoon of robots carrying repeater antennas
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 25/31

MANET
antennadmin
dmax
rmax
→ Each antenna has a maximum communication range equal to rmax
→ Each antenna needs to be in a range [dmin, dmax] from the other
antennas
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 26/31
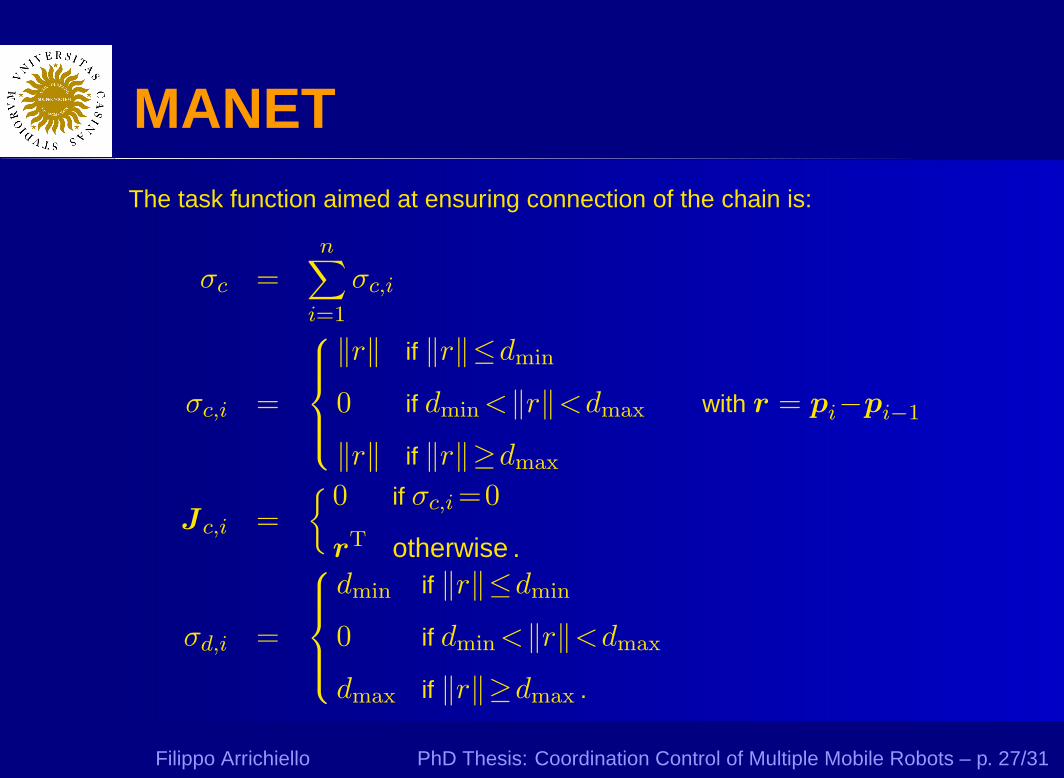
MANETThe task function aimed at ensuring connection of the chain is:
σc =n∑
i=1
σc,i
σc,i =
‖r‖ if ‖r‖≤dmin
0 if dmin <‖r‖<dmax with r = pi−pi−1
‖r‖ if ‖r‖≥dmax
J c,i =
{0 if σc,i =0
rT otherwise .
σd,i =
dmin if ‖r‖≤dmin
0 if dmin <‖r‖<dmax
dmax if ‖r‖≥dmax .
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 27/31

MANET
The tasks are organized in priorities :
1. avoid the obstacles;
2. keep the next antenna in the coverage area;
3. keep the previous antenna in the coverage area.
A supervisor is in charge of detecting when the moving robot is going outside
the maximum MANET coverage and, eventually, modifying the tasks’ priorities
or adding/removing tasks
The virtual chain is organized at each sampling time
Simulations: Obstacles building
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 28/31

Conclusions
→ Introduction to multi-robot systems
→ Description of the Null-Space-based Behavioral (NSB) control for the
control of a generic multi-robot system
→ Implementation of the NSB to control a team wheeled mobile robots
performing several formation control missions with collision avoidance
→ The NSB has been test in simulative case studies while controlling a fleet
of marine surface vessels with a particular actuation system and a team
of mobile antennas
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 29/31
Conclusioni
→ The experimental and simulative results prove the effectiveness and
flexibility of the approach
→ The NSB is well suitable to control several typologies of vehicles
performing different missions
→ The NSB results robust to sensor noise, external disturbances and
non-static environment
→ The NSB results dynamically scalable to the adding or removing a vehicle
from the team during the mission
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 30/31

Publications
Journal Papers:
1. G. Antonelli, F. Arrichiello, S. Chiaverini, The Null-Space-Based Behavioral Control for Autonomous
Robotic Systems, Journal of Intelligent Service Robotics,in press 2007
2. G. Antonelli, F. Arrichiello, S. Chiaverini and R. Setola, Coordinated control of mobile antennas for
ad-hoc networks, International Journal of Modelling, Identification and Control, Special/Inaugural
issue on Intelligent Robot Systems, Vol. 1, No. 1, pp.63-71, 2006
Book Chapters
1. F. Arrichiello, S. Chiaverini and T.I. Fossen, Formation Control of Marine Surface Vessels using the
Null-Space-Based Behavioral Control, In Group Coordination and Cooperative Control
(K.Y.Pettersen, T.Gravdahl, and H.Nijmeijer, Eds.). Lecture Notes in Control and Information
Systems series, Springer-Verlag, pp.1-19, 2006
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 31/31

Publications
International Conference Papers (with review):
11. G. Antonelli, F. Arrichiello, S. Chakraborty and S. Chiaverini, Experiences of formation control of
multi-robot systems with the Null-Space-based Behavioral Control, Proceedings 2007 IEEE
International Conference on Robotics and Automation, Rome, I, 2007.
10. F. Arrichiello, S. Chiaverini and T.I. Fossen, Formation Control of Underactuated Surface Vessels using
the Null-Space-Based Behavioral Control, Proceedings 2006 IEEE/RSJ International Conference on
Intelligent Robots and Systems, Beijing, China, 2006
9. G. Antonelli, F. Arrichiello, S. Chiaverini and K.J. Rao, Preliminary Experiments of Formation Control
using the Null-Space-Based Behavioral Control, 8th IFAC Symposium on Robot Control, Bologna, I,
2006
8. G. Antonelli, F. Arrichiello, S. Chiaverini, Experiments of Formation Control with Collisions Avoidance
using the Null-Space-Based Behavioral Control, 14th Mediterranean Conference on Control and
Automation, Ancona, I, 2006
7. F. Arrichiello, S. Chiaverini, A simulation package for coordinated motion control of a fleet of
under-actuated surface vessels, 5th MATHMOD Conference, Vienna, Austria, 2006
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 31/31
Publications
6. G. Antonelli, F. Arrichiello, S. Chiaverini and R. Setola, Coordinated control of mobile antennas for
ad-hoc networks in cluttered environments, 9th International Conference on Intelligent Autonomous
Systems, Tokyo, J,2006
5. G. Antonelli, F. Arrichiello, S. Chiaverini and R. Setola, A Self-Configuring MANET for Coverage Area
Adaptation through Kinematic Control of a Platoon of Mobile Robots, IEEE/RSJ International
Conference on Intelligent Robots and Systems, Edmonton, CA, pp.1332-1337, 2005
4. G. Antonelli, F. Arrichiello and S. Chiaverini, The Null-Space-Based Behavioral Control for
Soccer-Playing Mobile Robots, 2005 IEEE/ASME International Conference on Advanced Intelligent
Mechatronics, Monterey, CA, pp.1257-1262, 2005
3. G. Antonelli, F. Arrichiello and S. Chiaverini, Experimental kinematic comparison of behavioral
approaches for mobile robots, 16th IFAC World Congress, Praha, CZ, 2005
2. G. Antonelli, F. Arrichiello and S. Chiaverini, The Null-Space-Based behavioral control for mobile robots,
IEEE International Symposium on Computational Intelligence in Robotics and Automation, Espoo,
Finland, pp.15-20, 2005
1. F. Arrichiello, S. Gerbino, How to investigate constraints and motions in assemblies by screw theory,
Proc. of 4th CIRP ICME’04 Int. Conf., Sorrento, I, 2004
Filippo Arrichiello PhD Thesis: Coordination Control of Multiple Mobile Robots – p. 31/31