course 2 image filtering. image filtering is often required prior any other vision processes to...
TRANSCRIPT

Course 2 Image Filtering

Course 2 Image Filtering
Image filtering is often required prior any other vision processes to remove image noise, overcome image corruption and change distribution in an image.
——linear filter
——nonlinear filter
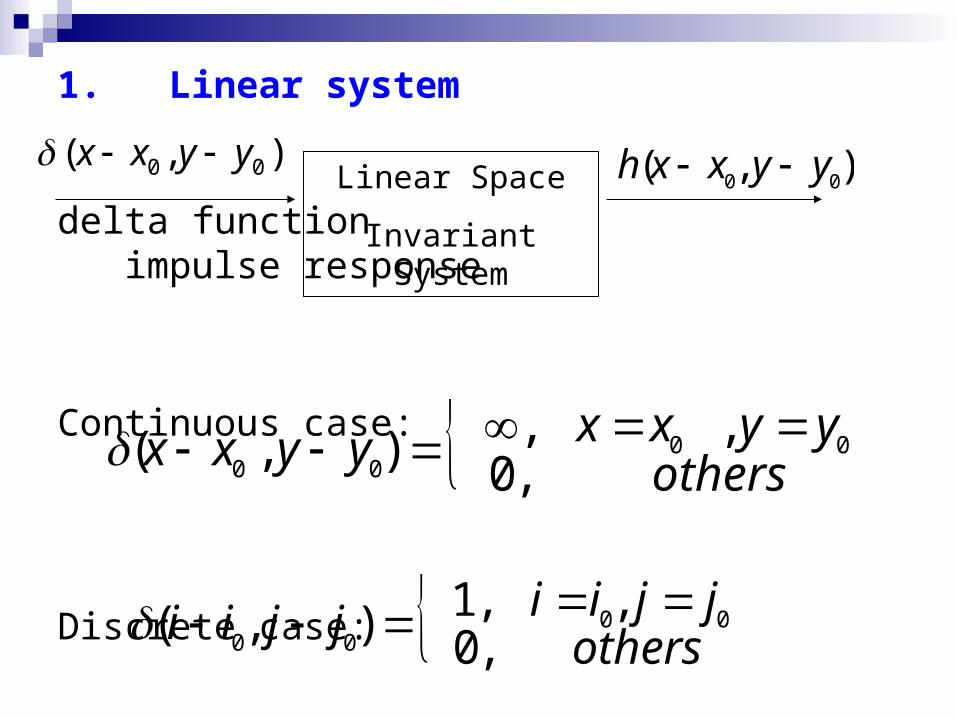
1. Linear system
delta function impulse response
Continuous case:
Discrete case:
),( 00 yyxx Linear Space
Invariant System
),( 00 yyxxh
othersyyxxyyxx ,0
,,),( 0000
othersjjiijjii ,0
,,1),( 0000

1),(),(),(
),(),(),(
0000
0000
0
_0
0
0
dxdyyyxxdxdyyyxxyx
yxfdxdyyyxxyxf
y
y
x
x
LSI h(x, y)
input
f (x, y)
output
g(x, y)
ydxdyyxxhyxf
yxhyxfyxg
),(),(
),(),(),( —— convolution ( 卷积 )
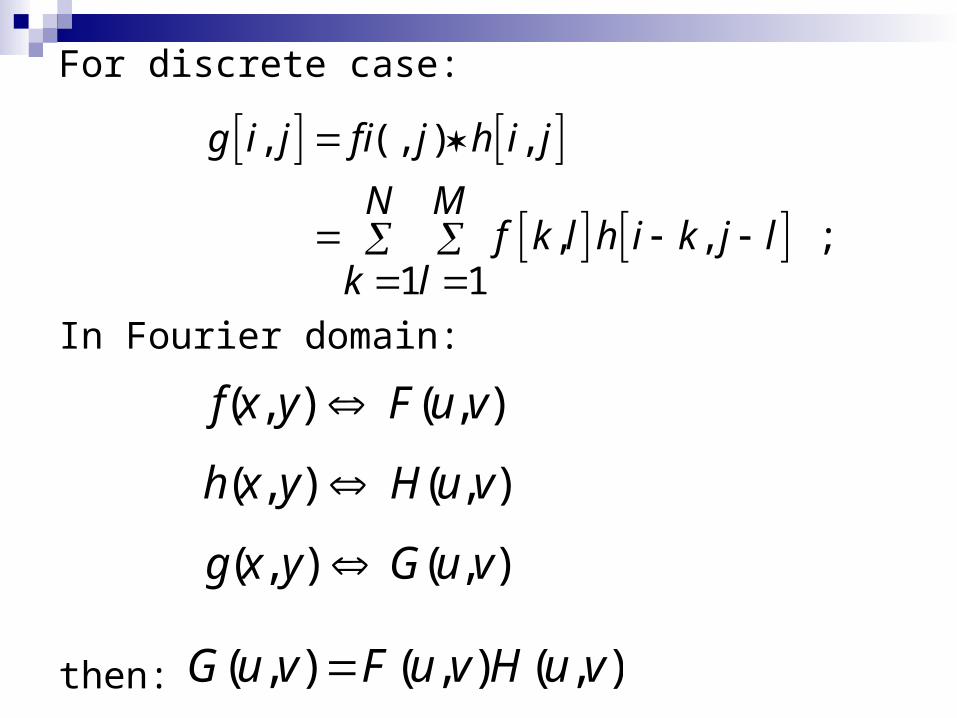
For discrete case:
In Fourier domain:
then:
, ( , ) ,
, , ;1 1
g i j f i j h i j
N Mf k l h i k j l
k l
),(),(
),(),(
),(),(
vuGyxg
vuHyxh
vuFyxf
),(),(),( vuHvuFvuG

( , )
1( , ) , ;
k l N
g i j f k lM
2. Mean Filter
—— average intensity values of the neighbor pixels at a pixel.
e.g. window neighbors.
where
9133
11
1 1
1( , ) , ;
9
ji
k i l j
g i j f k l
9M 91, jih
1 1 1
1 1 1
1 1 1
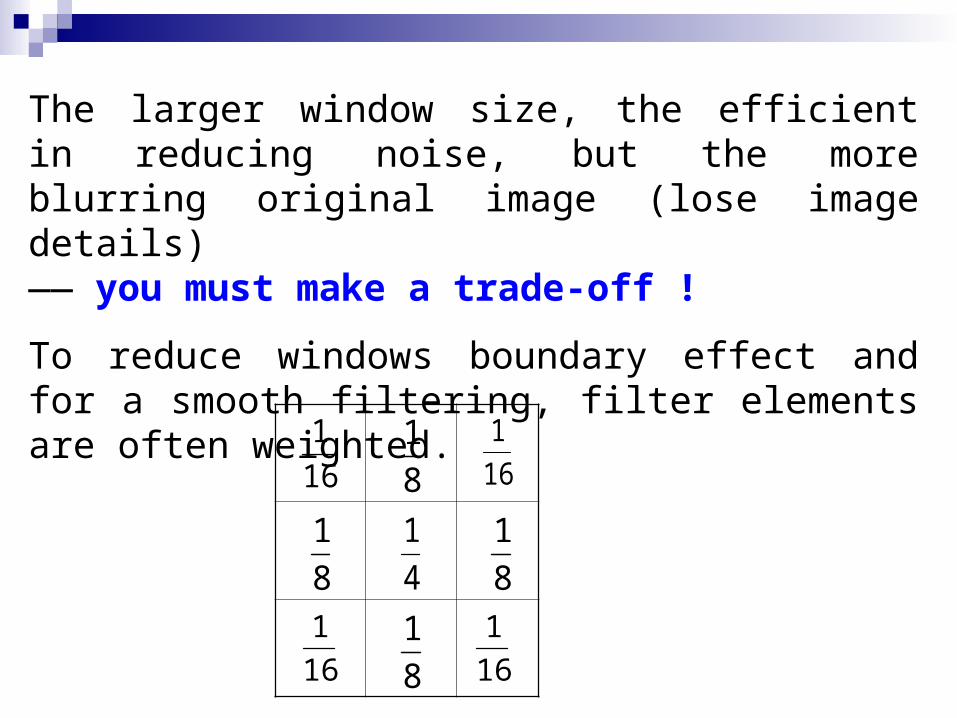
The larger window size, the efficient in reducing noise, but the more blurring original image (lose image details)—— you must make a trade-off !
To reduce windows boundary effect and for a smooth filtering, filter elements are often weighted.
16
1
8
1
4
1
16
1
16
1
16
1
8
1
8
1
8
1

Mean Filter on Gaussian noise corrupted image

3. Gaussian Filter:
impulse response of Gaussian filter:
—— linear system
—— rotational symmetric
—— Fourier Transformation is still a Gaussian
2
2
2
22
22),( ryx
eeyxh

For 1-D case:
It is still a Gaussian!
2
2
2 2
2 2
2
2
2
2
2
2 2
2
2
22
( ) ( )
cos sin
cos
2
1
j x
xj x
x x
x
F h x h x e dx
e e dx
e xdx j e xdx
e xdx
e
where

——Separatibility
It can easily be seen hat the Gaussian core can be separated in both space domain and Fourier domain, i.e.
So,
]},[{
],[
],[],[],[],[
1
22
2
1
22
2
1 1
22
)22(
1 1
ljkifee
ljkife
ljkiflkhjifjih
n
l
lm
k
k
m
k
n
l
lk
m
k
n
l
]),[][(][],[ 21 jifjhihjig

In Fourier Domain,
——Cascading operation:
Let
If a Gaussian filter has a large parameter , it requires a large operation mask and thus, it will take long time to process.
),(),( vuHyxh
)(),()(),(),(),( 21 vHvuFuHvuHvuFvuG
22
2
21 )()(
x
exhxh
2)2(2
2
22
2)(22
2
21 )()()(
xx
edeexhxhxh

We can separate the large Gaussian of into two smaller Gaussian filters of parameter and perform the filtering processes in cascade.
4. Discrete Guassian Filter
Where
window size
22
;],[22
22
ji
kejih
1 12 2
2 2
1 ( , ), ( )
N N
N Ni j
k h i j normalizing factor
NN

To form a Gaussian Filter:
(1) Choose a proper size N of mask window.
(2) Calculate the value of each mask element.
e.g.
(3) Scale all mask elements to integer with the same scaling factor.
7,22 N
011.0011.0
779.0
779.01779.0
779.0
011.0011.0

91011.01 Scale
(4) find the normalizing factor k
Therefore, for an input image output of Gaussian smooth is:
11
71
719171
71
11
1115
1
11
71
719171
71
11
]);,[,(1115
1),( jihjifjig
),,( jif

By the way,
A two-dimenssional Gaussian filter can be extended by two one –dimentional Gaussian
(how? Homework).
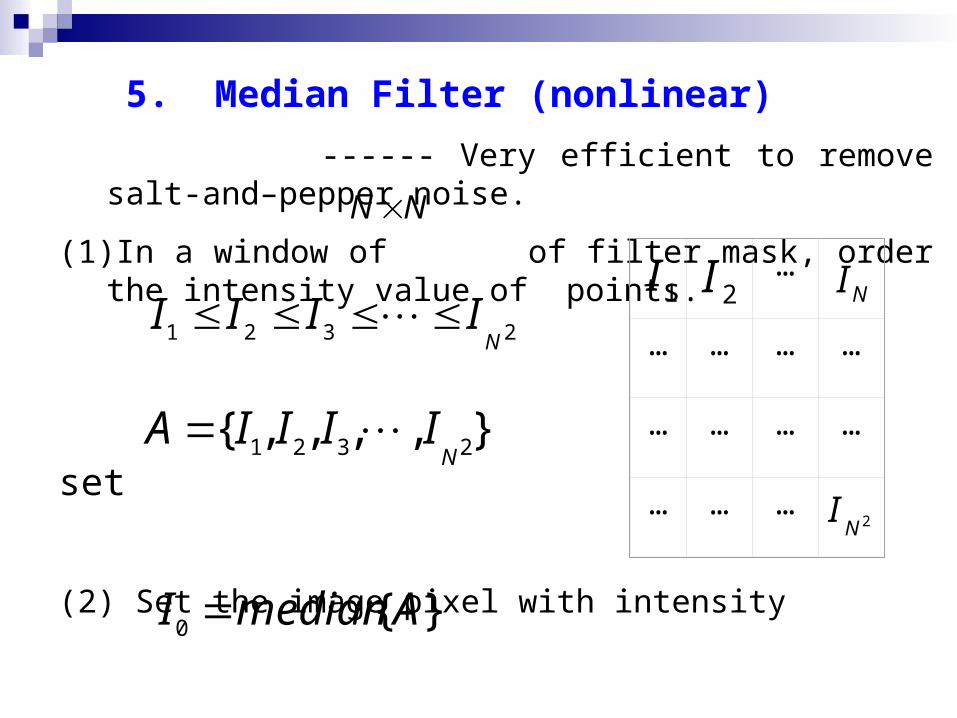
5. Median Filter (nonlinear)
------ Very efficient to remove salt-and–pepper noise.
(1)In a window of of filter mask, order the intensity value of points.
set
(2) Set the image pixel with intensity
NN
1I 2I NI
2NI
…
… … … …
… … … …
… … …
2321 NIIII
},,,,{ 2321 NIIIIA
}{0 AmedianI

75 99 36
38 49 10
19 98 22
For example,
99,98,75,49,38,36,22,19,10A
380 AmedianI

Other nonlinear filters:
——minimum filter(remove salt noise):
——maximum filter (remove pepper noise)
——Midpoint filter ( remove Gaussian noise and uniform noise)
0 min I A
0 maxI A
210 2
NI I
I

Median filter on salt-and-pepper noise corrupted image

Minimum filter on salt noise corrupted image

Morphological Filters
(1)Review of “set”:
Intersection:
Union:
Complement:
Translation:
where are position, and is a vector operation.
A B P P A and P B
A B P P A or P B
}|{ APandPPA
AabaAb ba, ba
A B
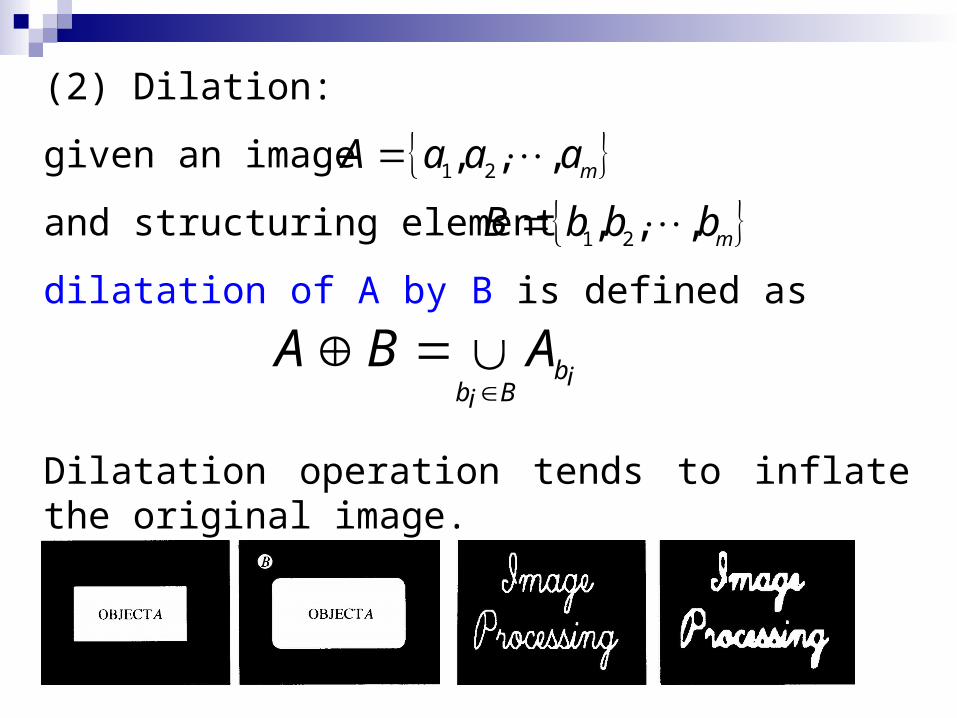
(2) Dilation:
given an image
and structuring element
dilatation of A by B is defined as
Dilatation operation tends to inflate the original image.
maaaA ,,, 21
mbbbB ,,, 21
Bib
ibABA

(3) Erosion:
Erosion of A by B is defined by all pixel that
makes inside the image A, i.e.
or, equivalently
Erosion operation intends to shrink original
image.
Aa
aB
aA B a B A
BABA Θ
(4)Opening:
Open operation to an image is erosion followed by dilation with the same structuring element. It will remove the image regions that a too small to contain the structuring element, leaving the resulted image approximately unchanged.
(5)Closing:
Closing operation to an image is dilation followed by erosion. It will fill in holes and concavities smaller than structuring element, leaving the resulted image approximately unchanged.
BBA }{
BBA }{

6.Histogram Modification (Image Enhancement)
Uniform intensity distribution of an image can fit human interpretation of the image, it also meets the requirements of some image operations, such as image thresholding.
original intensity distribution uniform intensity distribution
Let original image has intensity and with probability . The transformed image has intensity
with probability .
Then, the transformation
]1,0[r)(rPr
]1,0[S )(sPs

r
r dPrTS 0 )()( 10 r
will makes resultant image have uniform intensity distribution, i.e.
Prove:
For discrete case, let the original image has intensity is the number of
1)( sPs
dPSr
r )(0
dr
dsPr
11)(
1)()(
)()()( 111 sTrsTrr
rsTrrs rPrP
ds
drPsP
1 2 3, , , , ,kZ Z Z ZiP
pixels at level in its histogram , we
want to map the image to a new one with the same
of number of intensity level but different histogram,
where the histogram is pre-
designed (e.g., uniform):
1) find a intensity level K, which that:
then, map pixels of levels to level in the new image.
iZnPPP ,,, 21
],,,[ 21 ki qqqq
1
11
11
1
K
ii
K
ii PqP
121 ,,, kZZZ

2) find intensity :
then, map pixels of level to level in new image.
3) repeat until all intensity levels of original image
have been included.
2
121
12
1
K
ii
K
ii PqqP
121,, kk ZZ
2Z
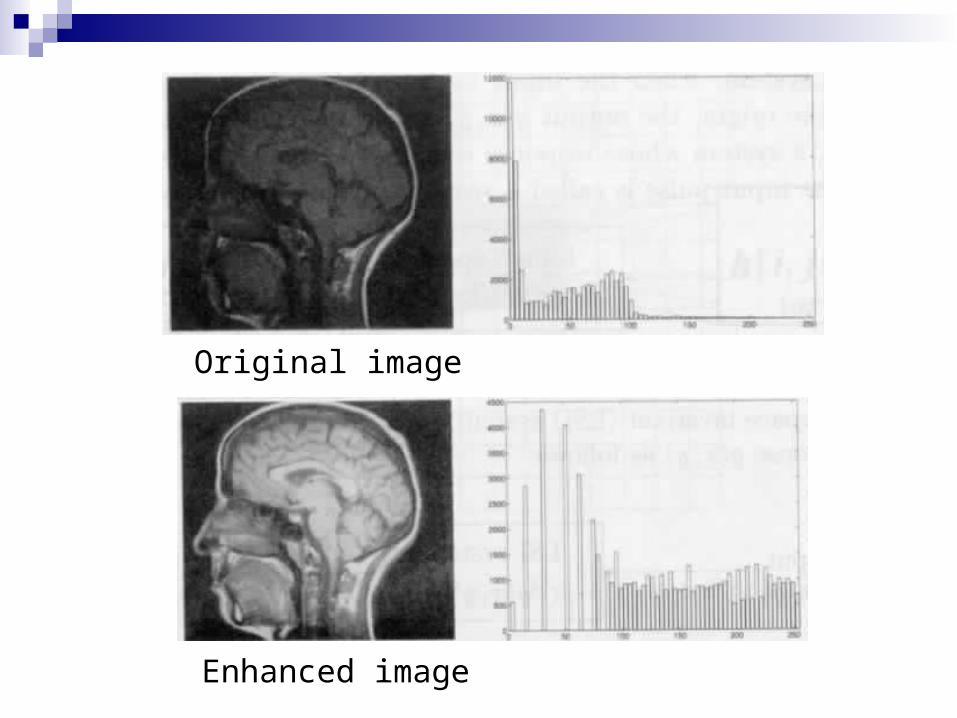
Original image
Enhanced image