cpsc 452: lecture 1 introduction, homogeneous transformations and coordinate frames
Post on 21-Dec-2015
216 views
TRANSCRIPT

CPSC 452: Lecture 1
Introduction,
Homogeneous transformations and Coordinate frames

2
Introduction
• Robots in movie

3
Modern Robots
• Robot in life– Industry– Medicare

4
Modern Robots
• Robot in life– Home/Entertainment

5
Modern Robots
• Robots in life– Military/Unmanned Vehicle

6
What is a robot
• “A robot is a reprogrammable multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks”– by Robot Institute of America

7
Scope of CPSC 452
Planning Sensing
Control
Dynamics
Kinematics
Rigid body mechanics

8
Scope of CPSC 452
Planning Sensing
Control
Dynamics
Kinematics
Rigid body mechanics

9
Intro
• Space– Type – Physical, Geometry, Functional– Dimension– Direction
• Basis vectors
– Distance• Norm
– Description – Coordinate System• Matrix

10
A review of vectors and matrix
• Vectors– Column vector and row vector
– Norm of a vector
nv
v
v
v2
1
nvvvv 21
222
21 ... nvvvv
11
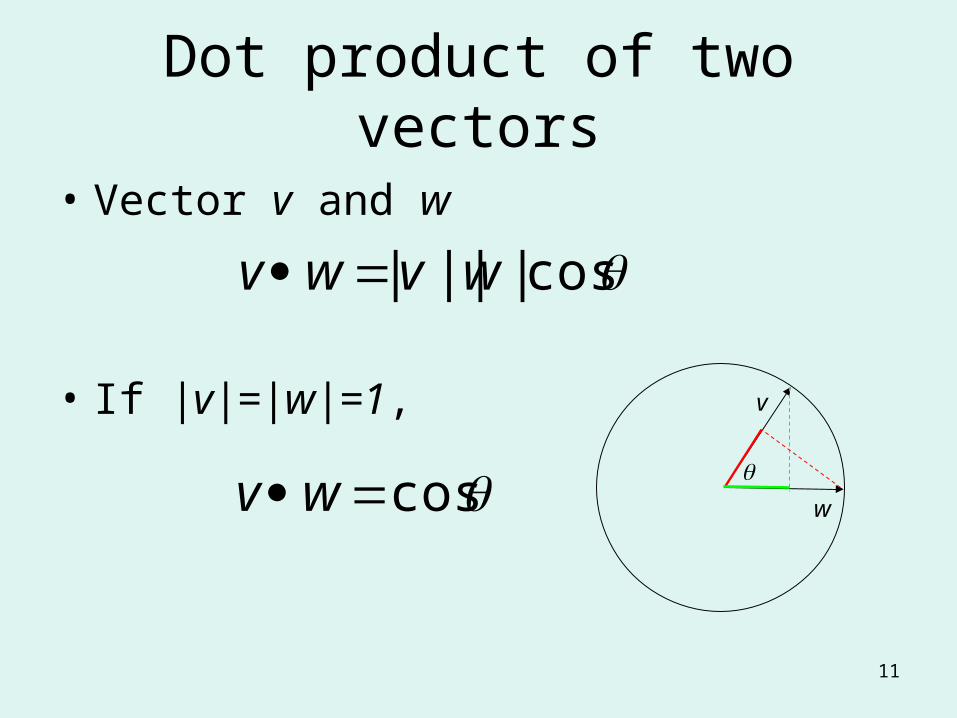
Dot product of two vectors
• Vector v and w
• If |v|=|w|=1,
cos|||| wvwv
cos wv
v
w

12
Position Description
• Coordinate System A
z
y
x
PA
PA
AX
AY
AZ

13
Orientation Description
• Coordinate System A
z
y
x
PA
PA
AX
AY
AZ

14
Orientation Description
• Coordinate System A• Attach Frame
Coordinate System B
z
y
x
PA
PA
AX
AY
AZBZ
BYBX

15
Orientation Description
• Coordinate System A• Attach Frame
Coordinate System B• Rotation matrix
PA
AX
AY
AZBZ
BYBX
333231
232221
131211
ˆˆˆ
rrr
rrr
rrr
ZYXR BA
BA
BAA
B
AB XXr ˆˆ11
AB YXr ˆˆ21
AB ZXr ˆˆ31

16
Rotation matrix
ABABAB
ABABAB
ABABAB
BA
BA
BAA
B
ZZZYZX
YZYYYX
XZXYXX
ZYXR
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆˆ
BA X
TA
B X
TBA
T
AB
AB
AB
TA
B
TA
B
TA
B
RZYX
Z
Y
X
ˆˆˆ
ˆ
ˆ
ˆ
Directional Cosines
Directional Cosines

17
Rotation matrix
• For matrix M,– If M-1 = MT , M is orthogonal matrix– is orthogonal!!
1 RRIRR BA
AB
BA
AB
TBA
AB RR
1 RR BA
TAB
RAB

18
Orthogonal Matrix
ABABAB
ABABAB
ABABAB
BA
BA
BAA
B
ZZZYZX
YZYYYX
XZXYXX
ZYXR
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆˆ
9 Parameters to describe orientation!

19
Description of a frame
• Position + orientation
BORGAP
AX
AZBZ
BYBX},{}{ BORG
AAB PRB
AY

20
Graphical representation
BORGAP
AX
AZBZ
BYBX
AY{A}
{B}
{U}
uZ
uX
uY
},{}{ AORGuu
A PRA
},{},{}{ BORGAA
BBORGuu
B PRPRB
BORGuP

21
Mapping – Translation Difference
BORGAP
AX
AZBZ
BYBX
AY
PB
PPP BBORG
AA
PA
11
PT
P BAB
A
1000
BORGA
AB
PIT

22
Mapping – rotation difference
AX
AZ
AY
BZ
BY
BX
PB
PR
P
P
P
ZYX
ZPYPXPP
ZPYPXP
P
P
P
P
BAB
z
y
x
B
BA
BA
BA
BAzB
AyB
Ax
A
BzByBx
z
y
x
B
B
]ˆˆˆ[
ˆˆˆ
ˆˆˆPRP BA
BA
11
PT
P BAB
A
1000
0RT
ABA
B

23
ExampleBY
BX
AXAYPB
30
30
AB ZZ ˆˆ
?
1
2
1
PP AB
0cos90cos90cos
90cos30cos120cos
90cos60cos30cos
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆˆ
ABABAB
ABABAB
ABABAB
BA
BA
BAA
B
ZZZYZX
YZYYYX
XZXYXX
ZYXR

24
PBPRBAB
Rotation + Translation Difference
BORGAP
AZBZ
BY
BX
AY
PA
AXPA

25
Homogeneous Transformation
PRPP BABBORG
AA
110001_
_
_
zB
yB
xB
zBORGA
yBORGAA
B
xBORGA
zAy
Ax
A
P
P
P
P
PR
P
P
P
P
TAB

26
Mapping – Translation Difference
BORGAP
AX
AZBZ
BYBX
AY
PB
PPP BBORG
AA
PA
11
PT
P BAB
A
1000
BORGA
AB
PIT

27
Translation Operator
1PA
AX
AZ
AY
QPP AAA 12QA
• Translation operator2P
A
12 )( PqDP AQ
A
1000
100
010
001
)(z
y
x
Q q
q
q
qD
222zyx qqqq

28
Mapping – rotation difference
AX
AZ
AY
BZ
BY
BX
PB
PRP AAB
A
11
PT
P BAB
A
1000
0RT
ABA
B

29
Rotation Operator
AX
AZ
AY
1PA
2PA
BX
BY
21 PP AB
100
0cossin
0sincos
0cos90cos90cos
90coscos)90cos(
90cos)90cos(cos
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆˆ
ABABAB
ABABAB
ABABAB
BA
BA
BAA
B
ZZZYZX
YZYYYX
XZXYXX
ZYXR