cs-ee 481 spring 2006 1founder’s day, 2006 university of portland school of engineering electric...
TRANSCRIPT

CS-EE 481 Spring 2006
Founder’s Day, 2006 1University of Portland School of Engineering
Electric Vehicle Drive System
AuthorsSteven Arlint
Abdullah Binsaeed
Dustin Buscho
AdvisorDr. Robert J. Albright
Industry RepresentativeMr. Paul M. Menig
Freightliner

CS-EE 481 Spring 2006
Founder’s Day, 2006 2University of Portland School of Engineering
Agenda
• Introduction Dustin Buscho• Background Dustin Buscho• Methods Steven Arlint• Results Steven Arlint• Conclusions Abdullah Binsaeed• Demonstration Abdullah Binsaeed

CS-EE 481 Spring 2006
Founder’s Day, 2006 3University of Portland School of Engineering
Introduction• Light Weight Electric Vehicle Drive System• Designed for motor scooter or motorcycle• Designed to compete against gasoline based systems• It is an important technology for inner-city commuting• Solves problem of lack of purpose built electronics
CS-EE 481 Spring 2006
Founder’s Day, 2006 4University of Portland School of Engineering
Background: drive system
• Driver and vehicle weight of approximately 450 lbs.
• Target speed of 35 MPH• No target range (depends on batteries used)• Main emphasis on the motor control and feedback• Displays data

CS-EE 481 Spring 2006
Founder’s Day, 2006 5University of Portland School of Engineering
Background
• 450 lb weight is
for 170 lb. rider• Used go-kart chassis
for approximation

CS-EE 481 Spring 2006
Founder’s Day, 2006 6University of Portland School of Engineering
Background: speed of 35 MPH
• Requires adequate power in controller• 120 volts, 50 amperes continuous (6 KW)• Peak power of 15 KW• 120 volt motor and battery needed

CS-EE 481 Spring 2006
Founder’s Day, 2006 7University of Portland School of Engineering
Background: no target range
• Lead acid vs. Nickel vs. Lithium• The more money the more range

CS-EE 481 Spring 2006
Founder’s Day, 2006 8University of Portland School of Engineering
Background: displays data
• Speed• Distance• Voltage• Current• Power• Cumulative Power

CS-EE 481 Spring 2006
Founder’s Day, 2006 9University of Portland School of Engineering
Methods: initial research
• Learned industry standards• Motor types (testing and Simulink)• Control circuitry (Simulink)• Battery types (testing)

CS-EE 481 Spring 2006
Founder’s Day, 2006 10University of Portland School of Engineering
Methods: initial design
• Basic power electronics module (PSPICE)• Inexpensive motor and batteries• Chose microcontroller based control (MPLAB)• Connect the two systems (hand calculations)

CS-EE 481 Spring 2006
Founder’s Day, 2006 11University of Portland School of Engineering
Methods: first circuit build
• Simple microcontroller code (MPLAB)• Small scale (12 volts) (Oscilloscope)• Medium scale (36 volts) (Oscilloscope)

CS-EE 481 Spring 2006
Founder’s Day, 2006 12University of Portland School of Engineering
Methods: second design
• Start of second semester• 120 volt• Added control• Fail safes• Regenerative braking

CS-EE 481 Spring 2006
Founder’s Day, 2006 13University of Portland School of Engineering
Methods: final build and design
• Spring break• Digital gauge interfaced to logic control board• Sensors interfaced to digital gauge• Full version of microcontroller code (MPLAB)
CS-EE 481 Spring 2006
Founder’s Day, 2006 14University of Portland School of Engineering
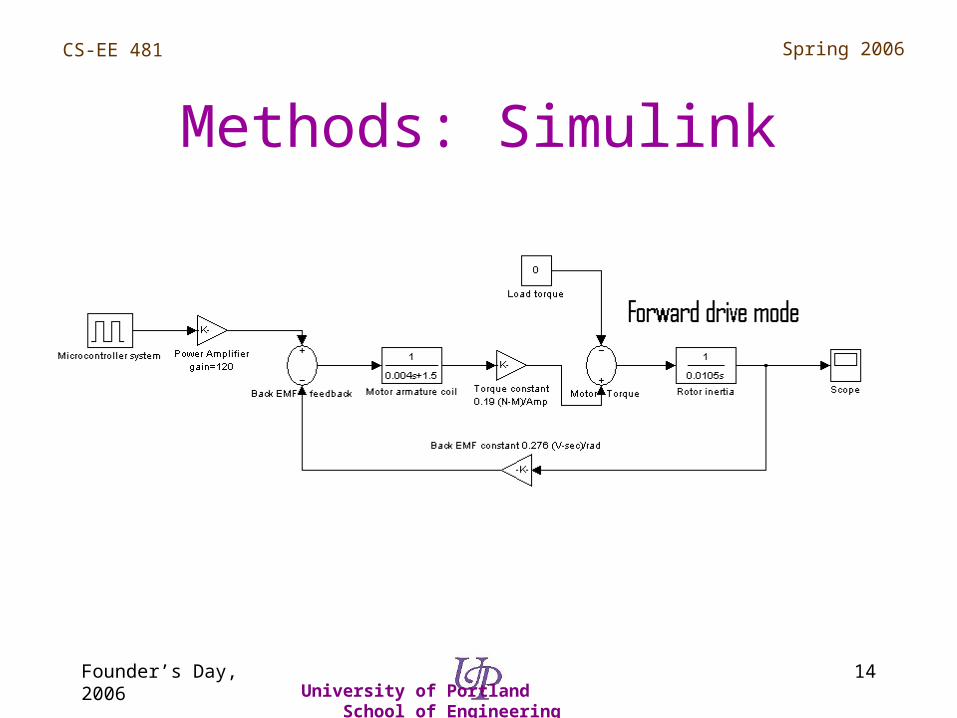
Methods: Simulink

CS-EE 481 Spring 2006
Founder’s Day, 2006 15University of Portland School of Engineering
Methods: Simulink

CS-EE 481 Spring 2006
Founder’s Day, 2006 16University of Portland School of Engineering
Methods: Simulink

CS-EE 481 Spring 2006
Founder’s Day, 2006 17University of Portland School of Engineering
Methods: MPLAB
CS-EE 481 Spring 2006
Founder’s Day, 2006 18University of Portland School of Engineering
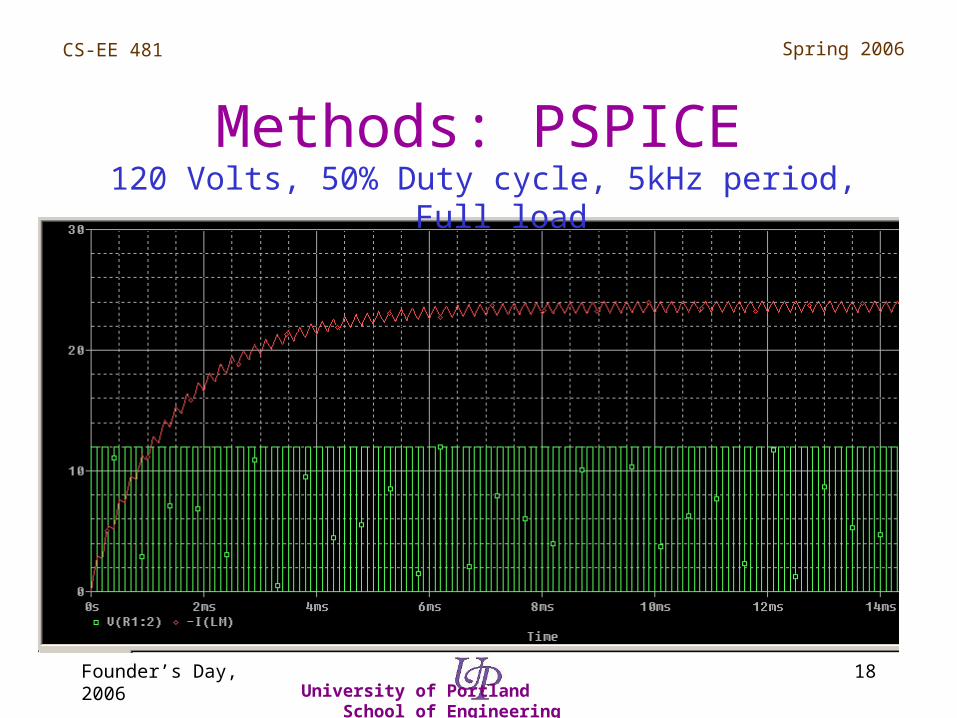
Methods: PSPICE120 Volts, 50% Duty cycle, 5kHz period, Full load
CS-EE 481 Spring 2006
Founder’s Day, 2006 19University of Portland School of Engineering
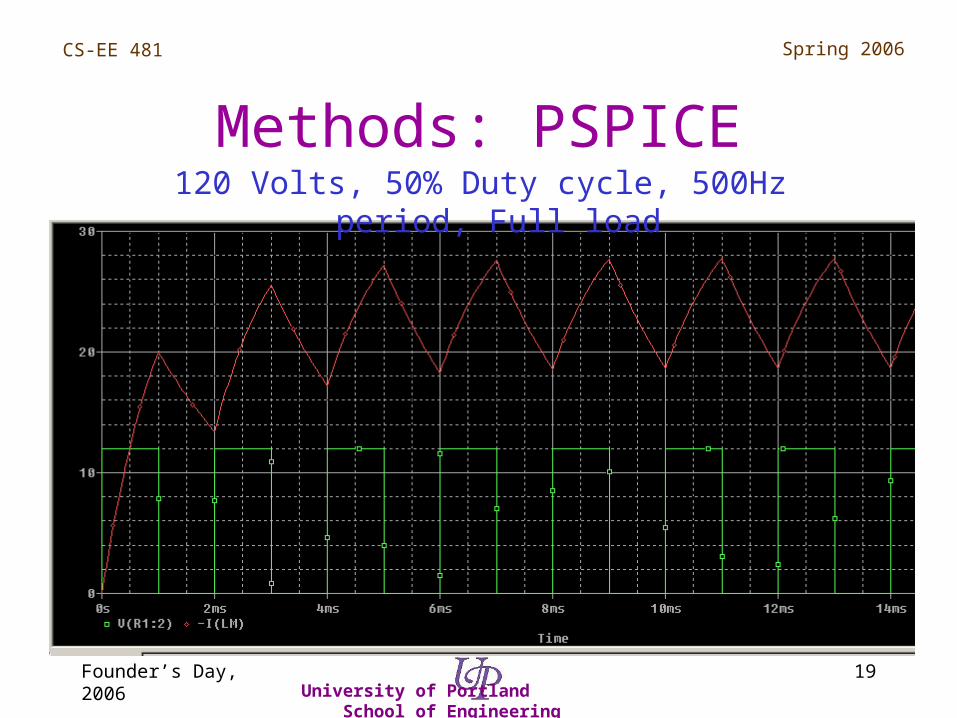
Methods: PSPICE120 Volts, 50% Duty cycle, 500Hz period, Full load

CS-EE 481 Spring 2006
Founder’s Day, 2006 20University of Portland School of Engineering
Methods: VisioTachometer
Throttle
Volt Meter
Logic Control
DisplayControl
Power Electronics
Main Battery
Main Contactor
Kill Switch
Motor
Fans

CS-EE 481 Spring 2006
Founder’s Day, 2006 21University of Portland School of Engineering
Results: three board architecture
• Power electronics• Logic control• Digital display gauge
CS-EE 481 Spring 2006
Founder’s Day, 2006 22University of Portland School of Engineering
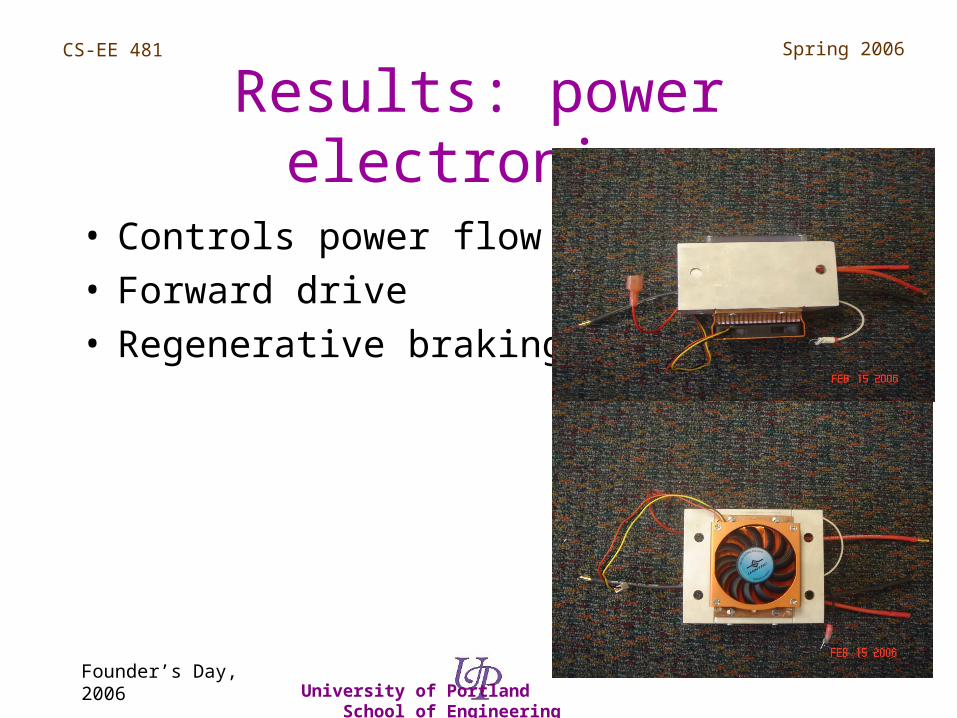
Results: power electronics
• Controls power flow• Forward drive• Regenerative braking

CS-EE 481 Spring 2006
Founder’s Day, 2006 23University of Portland School of Engineering
Results: logic control
• The middle board• Controls throttle, motor, regen, cooling, relay• Designed to fail off (pull down resistors)

CS-EE 481 Spring 2006
Founder’s Day, 2006 24University of Portland School of Engineering
Results: digital display
• Interfaces to logic control board and sensors• Samples all sensors @ 60Hz.• Performs math to calculate current• Over current conditions

CS-EE 481 Spring 2006
Founder’s Day, 2006 25University of Portland School of Engineering
Testing Results
• 35 MPH achieved• Current draw of 50 amperes accelerating• Digital display gauge is operational• No over heating in electronics• Kill switch works
CS-EE 481 Spring 2006
Founder’s Day, 2006 26University of Portland School of Engineering
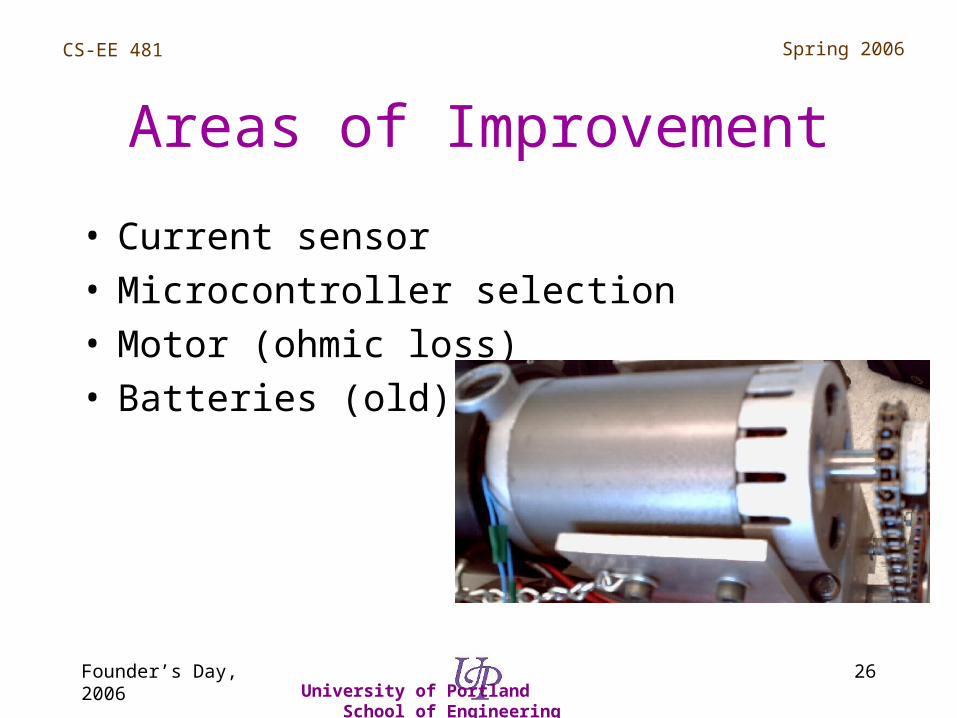
Areas of Improvement
• Current sensor• Microcontroller selection• Motor (ohmic loss)• Batteries (old)
CS-EE 481 Spring 2006
Founder’s Day, 2006 27University of Portland School of Engineering
Improvements: current sensor
• Measuring current
• Reason: math operations in microcontroller

CS-EE 481 Spring 2006
Founder’s Day, 2006 28University of Portland School of Engineering
Improvements: microcontroller
• General purpose
• Additional performance
• Two microcontrollers– Digital display gauge– Motor controller

CS-EE 481 Spring 2006
Founder’s Day, 2006 29University of Portland School of Engineering
Improvements: motor & batteries
• DC motor– Ohmic loss– Job done
• Lead acid batteries– Old– Internal resistance higher

CS-EE 481 Spring 2006
Founder’s Day, 2006 30University of Portland School of Engineering
Conclusions
• Purpose built electronics is key to electric vehicles• Electric motors can compete against gas engines• Being cost competitive as possible• Each person will have their reasons
CS-EE 481 Spring 2006
Founder’s Day, 2006 31University of Portland School of Engineering
Demonstration
• Driving and regenerative braking• Digital display gauges

CS-EE 481 Spring 2006
Founder’s Day, 2006 32University of Portland School of Engineering
Completed Product (side)

CS-EE 481 Spring 2006
Founder’s Day, 2006 33University of Portland School of Engineering
Completed Product (rear)