cs4495/6495 introduction to computer visioncs4495/6495 introduction to computer vision thanks to...
TRANSCRIPT

5C-L1 Shape from shading
CS4495/6495 Introduction to Computer Vision
Thanks to Srinivasa Narasimhan, Shree Nayar, David Kreigman, Marc Pollefeys
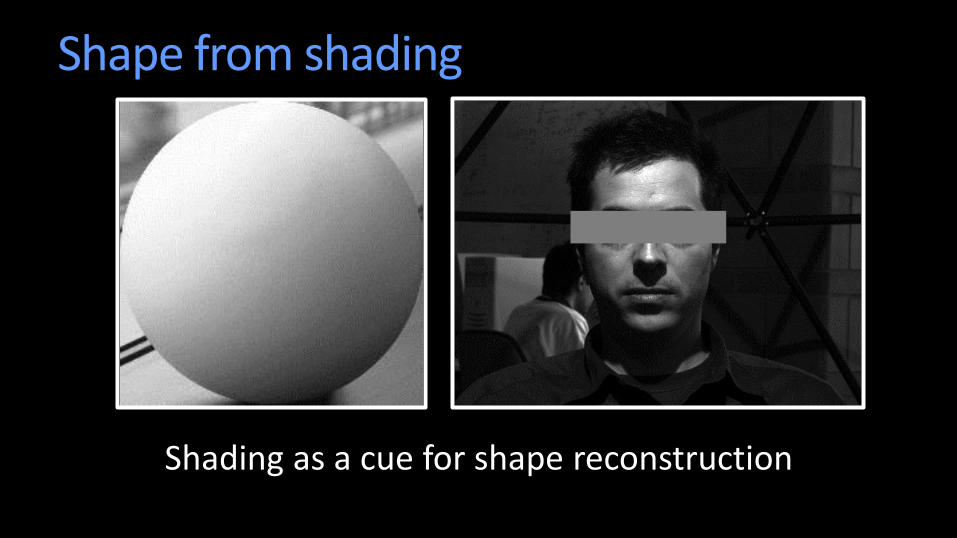
Shape from shading
Shading as a cue for shape reconstruction
Shape from shading/lighting
What is the relation between intensity and shape?
• Need to look at the reflectance function
• Reflectance Map

Surface normals: A bit of math
• Let’s assume we have a surface 𝑧(𝑥, 𝑦)
•We can define the following:
−𝜕𝑧
𝜕𝑥= 𝑝 −
𝜕𝑧
𝜕𝑦= 𝑞
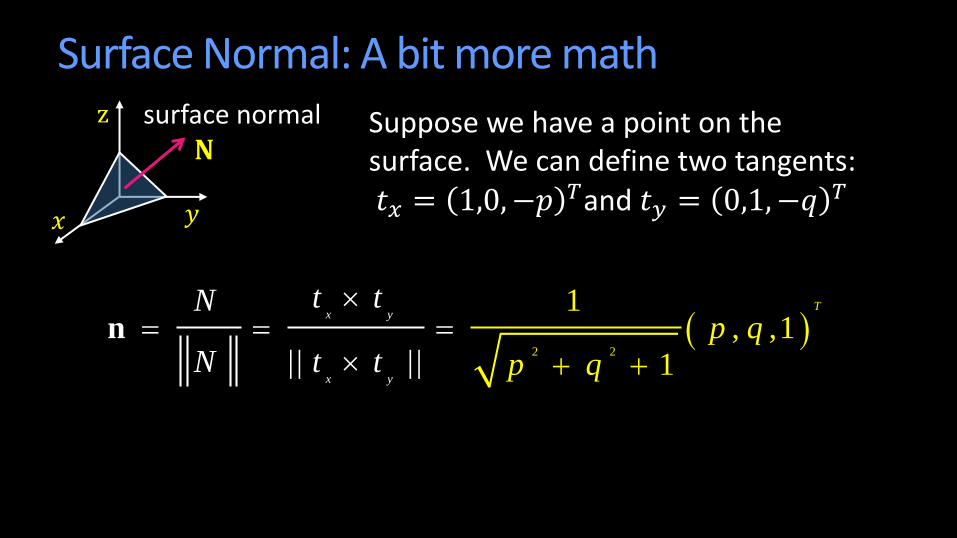
Surface Normal: A bit more math surface normal
𝑥 𝑦
z
𝐍 Suppose we have a point on the surface. We can define two tangents: 𝑡𝑥 = 1,0,−𝑝 𝑇and 𝑡𝑦 = 0,1,−𝑞 𝑇
2 2
| | |
1, ,1
| 1
x y
x y
Tt tN
Np q
p qt t
n
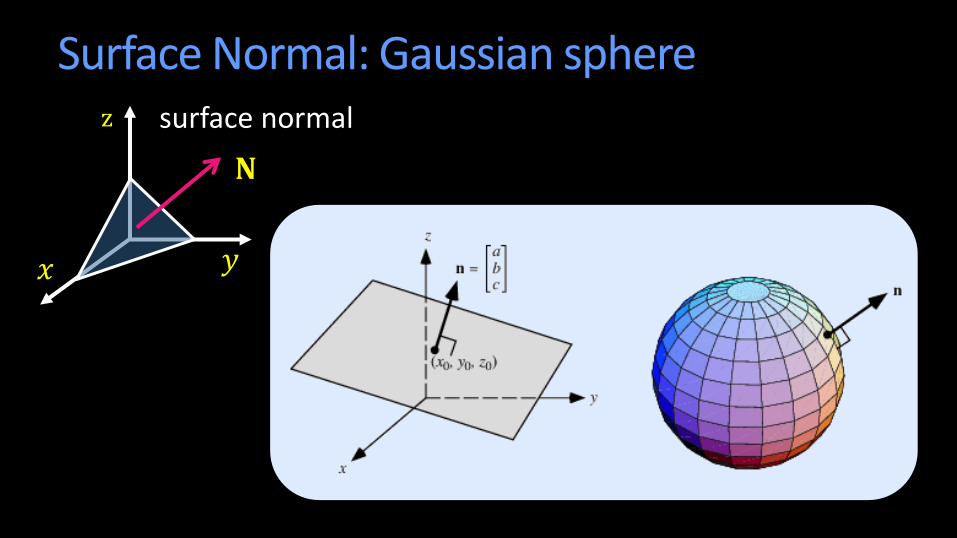
Surface Normal: Gaussian sphere surface normal
𝑥 𝑦
z
𝐍
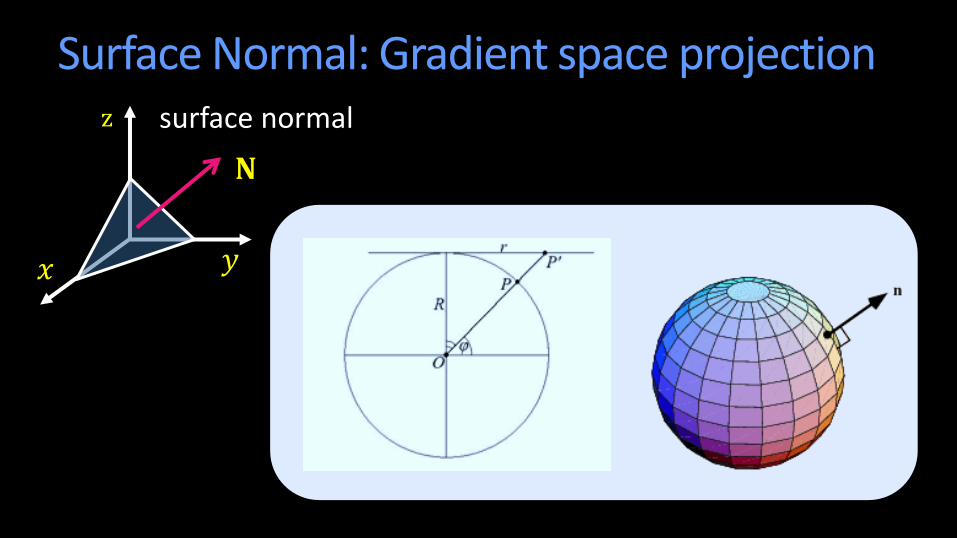
Surface Normal: Gradient space projection surface normal
𝑥 𝑦
z
𝐍

Surface Normal: Gradient space projection surface normal
𝑥 𝑦
z
𝐍
p
q (𝒑𝟎, 𝒒𝟎)
𝑧 = 1 plane is called Gradient Space (𝑝𝑞 plane)
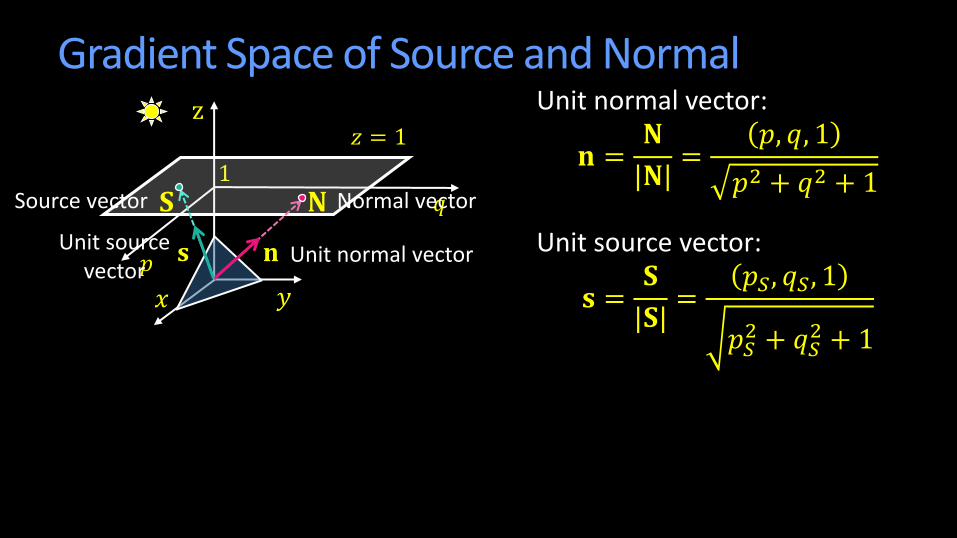
Gradient Space of Source and Normal z
𝑥 𝑦
𝑝
𝑞
1
𝑧 = 1
𝐒 𝐍
𝐧 𝐬
Unit normal vector:
𝐧 =𝐍
|𝐍|=
𝑝, 𝑞, 1
𝑝2 + 𝑞2 + 1
Unit source vector:
𝐬 =𝐒
|𝐒|=
𝑝𝑆, 𝑞𝑆, 1
𝑝𝑆2 + 𝑞𝑆
2 + 1
Normal vector
Unit normal vector
Source vector
Unit source vector
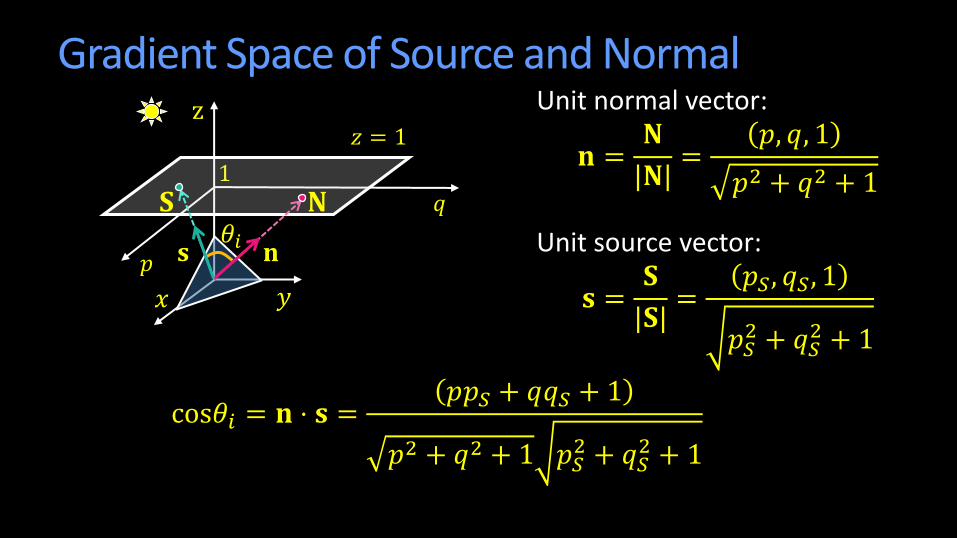
Gradient Space of Source and Normal z
𝑥 𝑦
𝜃𝑖 𝑝
𝑞
1
𝑧 = 1
𝐒 𝐍
𝐧 𝐬
Unit normal vector:
𝐧 =𝐍
|𝐍|=
𝑝, 𝑞, 1
𝑝2 + 𝑞2 + 1
Unit source vector:
𝐬 =𝐒
|𝐒|=
𝑝𝑆, 𝑞𝑆, 1
𝑝𝑆2 + 𝑞𝑆
2 + 1
cos𝜃𝑖 = 𝐧 ⋅ 𝐬 =𝑝𝑝𝑆 + 𝑞𝑞𝑆 + 1
𝑝2 + 𝑞2 + 1 𝑝𝑆2 + 𝑞𝑆
2 + 1

Shape from shading: Problem definition
𝐼(𝑥, 𝑦) 𝑍(𝑥, 𝑦)
Output: 3D shape of object Input: 1 or more images
Reflectance Map
Relates image brightness 𝐼(𝑥, 𝑦) to surface orientation (𝑝, 𝑞) for given source direction and surface reflectance

Reflectance Map: Lambertian case
Terms: 𝑘: source brightness 𝜌: surface albedo (reflectance)
Image brightness:
𝐼 = 𝜌 ⋅ 𝑘 ⋅ cos𝜃𝑖 = 𝜌 ⋅ 𝑘 (𝐧 ⋅ 𝐬)
Let 𝜌 ⋅ 𝑘 = 1 then 𝐼 = cos𝜃𝑖 = 𝐧 ⋅ 𝐬
𝐼(𝑥, 𝑦)
𝜃𝑖 𝐬
𝐧
𝐯
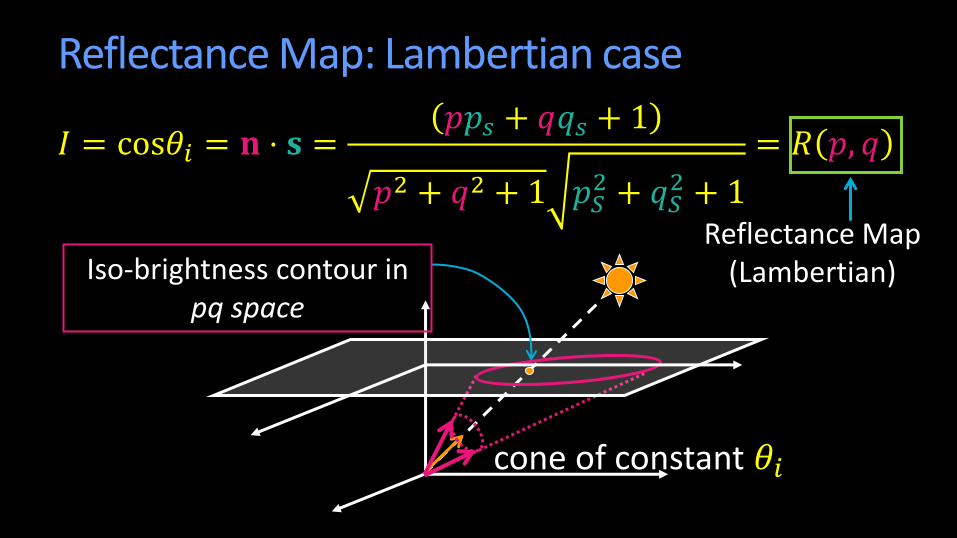
Reflectance Map: Lambertian case
cone of constant 𝜃𝑖
Iso-brightness contour in pq space
𝐼 = cos𝜃𝑖 = 𝐧 ⋅ 𝐬 =𝑝𝑝𝑠 + 𝑞𝑞𝑠 + 1
𝑝2 + 𝑞2 + 1 𝑝𝑆2 + 𝑞𝑆
2 + 1
= 𝑅 𝑝, 𝑞
Reflectance Map (Lambertian)

Note: 𝑅 𝑝, 𝑞 is maximum when 𝑝, 𝑞 = 𝑝𝑆, 𝑞𝑆
𝜃𝑖 = 90∘ 𝑝𝑝𝑆 + 𝑞𝑞𝑆 + 1 = 0
0.0
0.3
𝑝
𝑅 𝑝, 𝑞 = 0.7
0.8
0.9
1.0
𝑝𝑠, 𝑞𝑠
𝑞
Iso-brightness contours

Shape from a single image?
Given 𝑅(𝑝, 𝑞) ((𝑝𝑆, 𝑞𝑆) and surface reflectance) can we determine (𝑝, 𝑞) uniquely for each image point?
NO 𝑝
𝑞
Shape from Shading
Need more information:
•Add more constraints: Shape-from-shading
• Take more images: Photometric stereo
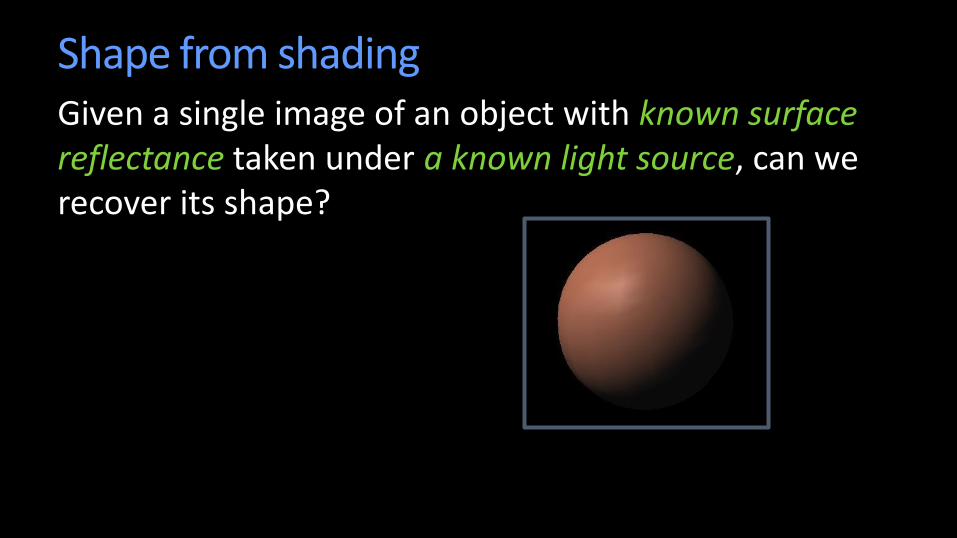
Given a single image of an object with known surface reflectance taken under a known light source, can we recover its shape?
Shape from shading
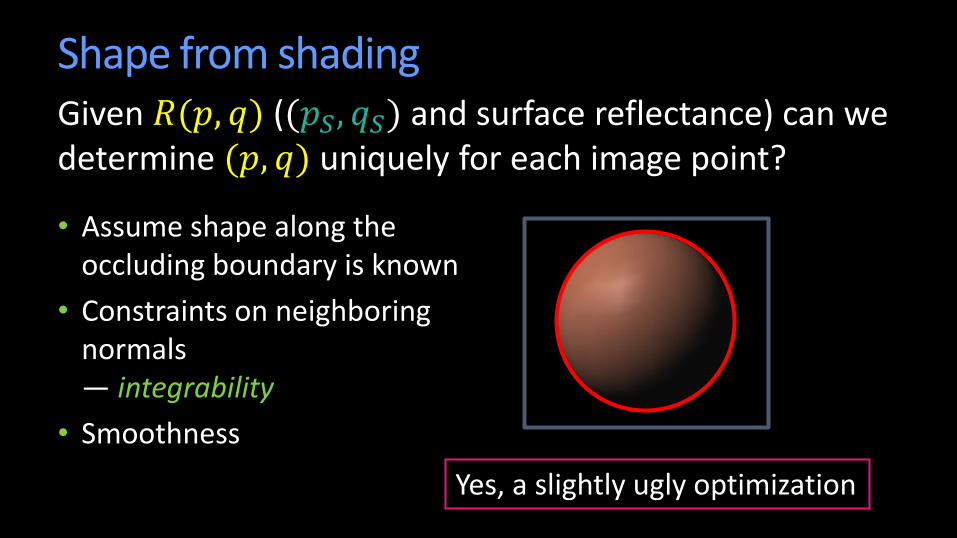
Given 𝑅(𝑝, 𝑞) ((𝑝𝑆, 𝑞𝑆) and surface reflectance) can we determine (𝑝, 𝑞) uniquely for each image point?
• Assume shape along the occluding boundary is known
• Constraints on neighboring normals — integrability
• Smoothness
Shape from shading
Yes, a slightly ugly optimization
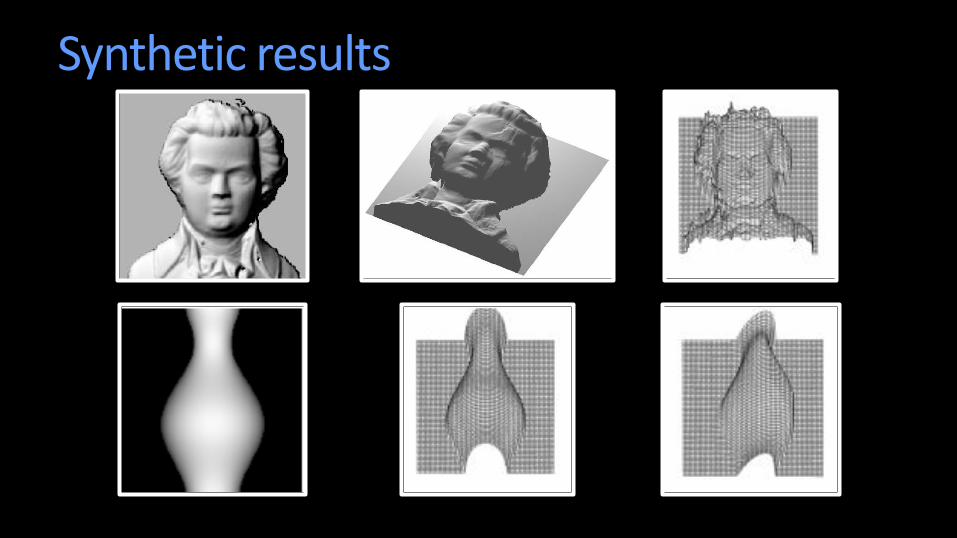
Synthetic results
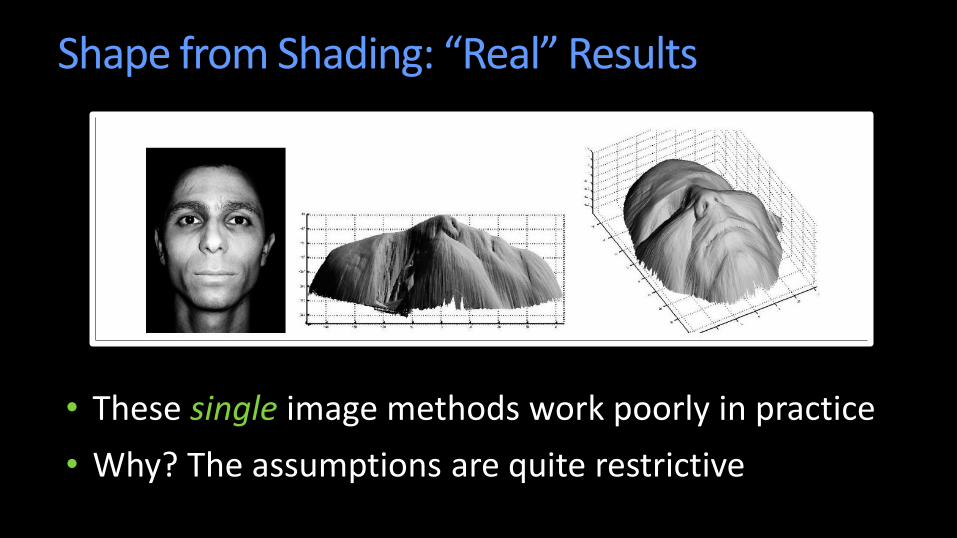
Shape from Shading: “Real” Results
• These single image methods work poorly in practice
• Why? The assumptions are quite restrictive
Shape from Shading
Need more information:
•Add more constraints: Shape-from-shading
• Take more images: Photometric stereo
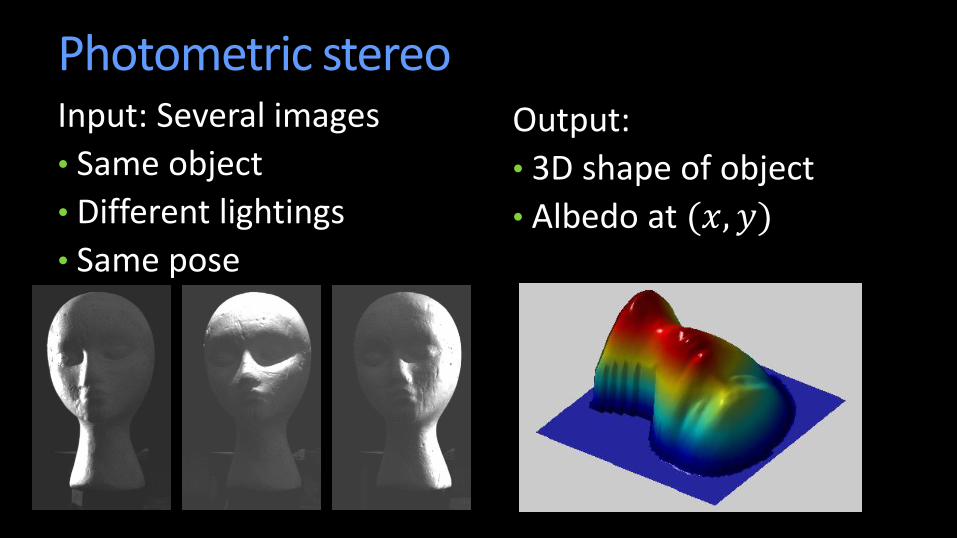
Photometric stereo Output:
• 3D shape of object
• Albedo at (𝑥, 𝑦)
Input: Several images
• Same object
• Different lightings
• Same pose
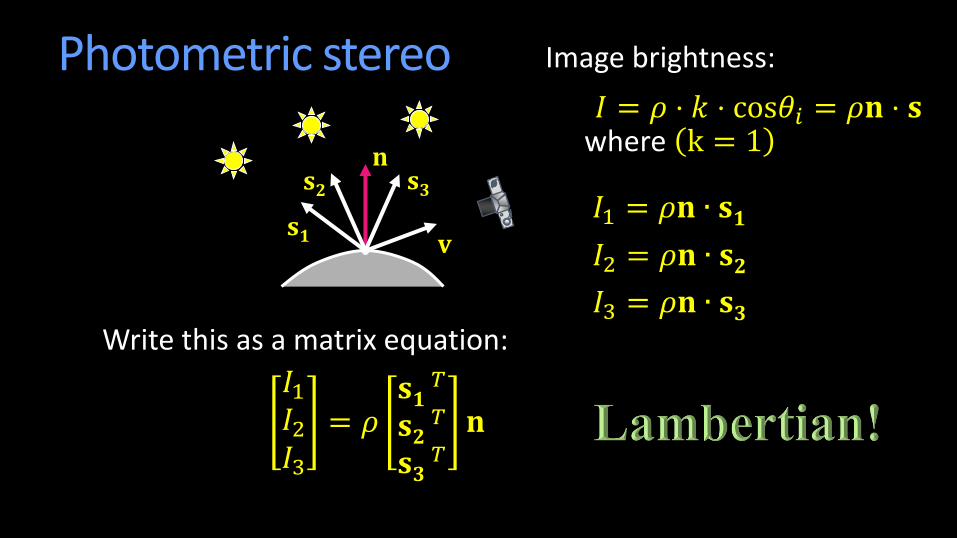
Photometric stereo Image brightness:
𝐧
𝐬𝟏
𝐬𝟑
𝐯
𝐬𝟐
𝐼1 = 𝜌𝐧 ∙ 𝐬𝟏
𝐼2 = 𝜌𝐧 ∙ 𝐬𝟐
𝐼3 = 𝜌𝐧 ∙ 𝐬𝟑
𝐼 = 𝜌 ⋅ 𝑘 ⋅ cos𝜃𝑖 = 𝜌𝐧 ⋅ 𝐬 where k = 1
Write this as a matrix equation:
𝐼1𝐼2𝐼3
= 𝜌𝐬𝟏
𝑇
𝐬𝟐 𝑇
𝐬𝟑 𝑇
𝐧
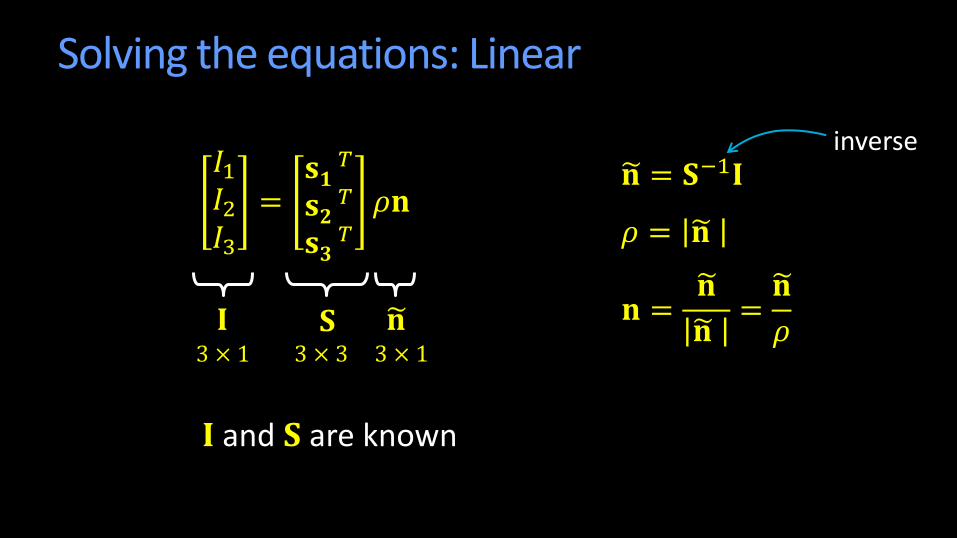
Solving the equations: Linear
𝐼1𝐼2𝐼3
=𝐬𝟏
𝑇
𝐬𝟐 𝑇
𝐬𝟑 𝑇
𝜌𝐧
𝐈 𝐒 𝐧 3 × 1 3 × 3 3 × 1
𝐧 = 𝐒−1𝐈
𝜌 = 𝐧
𝐧 =𝐧
𝐧 =𝐧
𝜌
𝐈 and 𝐒 are known
inverse

Adding more light sources
Get better results by using more (𝑀) lights:
𝐼1⋮𝐼𝑀
=𝐬𝟏
𝑇
⋮𝐬𝑀
𝑇
𝜌𝐧
Least squares solution:
𝐈 = 𝐒𝐧 𝐒𝑇𝐈 = 𝐒𝑇𝐒𝐧 𝐧 = 𝐒𝑇𝐒 −𝟏𝐒𝑇𝐈
Solve for𝜌, 𝐧 as before
𝑀 × 1 = 𝑀 × 3 3 × 1
Moore-Penrose pseudo inverse min 𝐈 − 𝐒𝐧 2
2
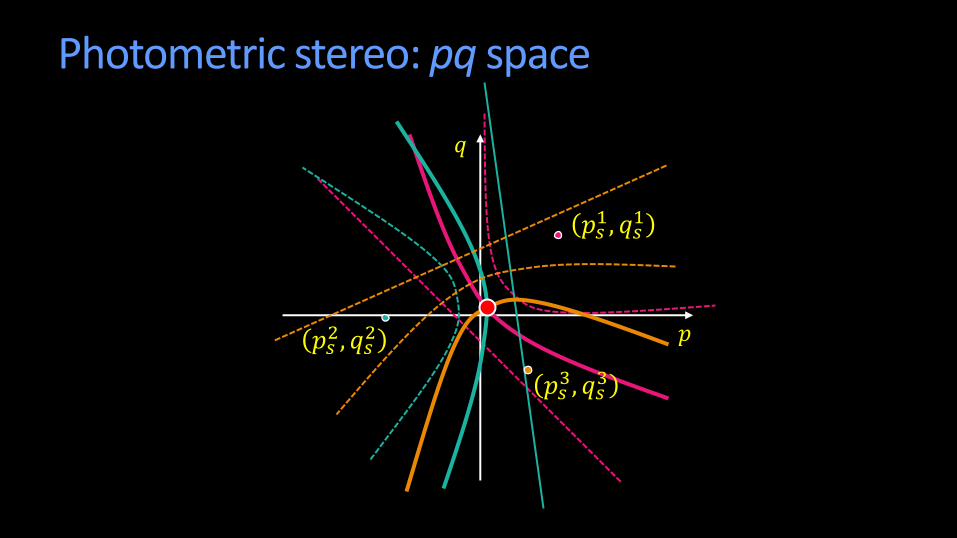
Photometric stereo: pq space
𝑝
𝑞
𝑝𝑠1, 𝑞𝑠
1
𝑝𝑠2, 𝑞𝑠
2
𝑝𝑠3, 𝑞𝑠
3
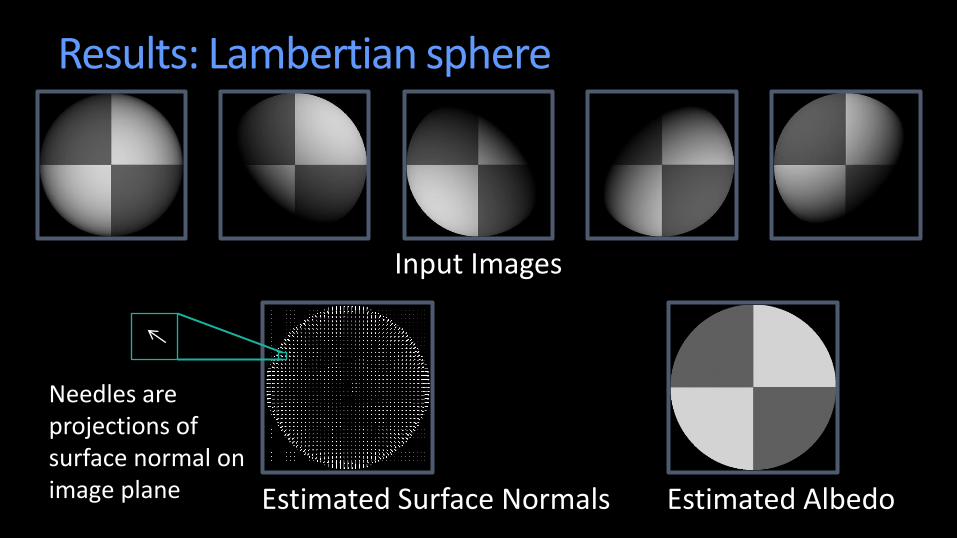
Results: Lambertian sphere
Input Images
Estimated Albedo Estimated Surface Normals
Needles are projections of surface normal on image plane
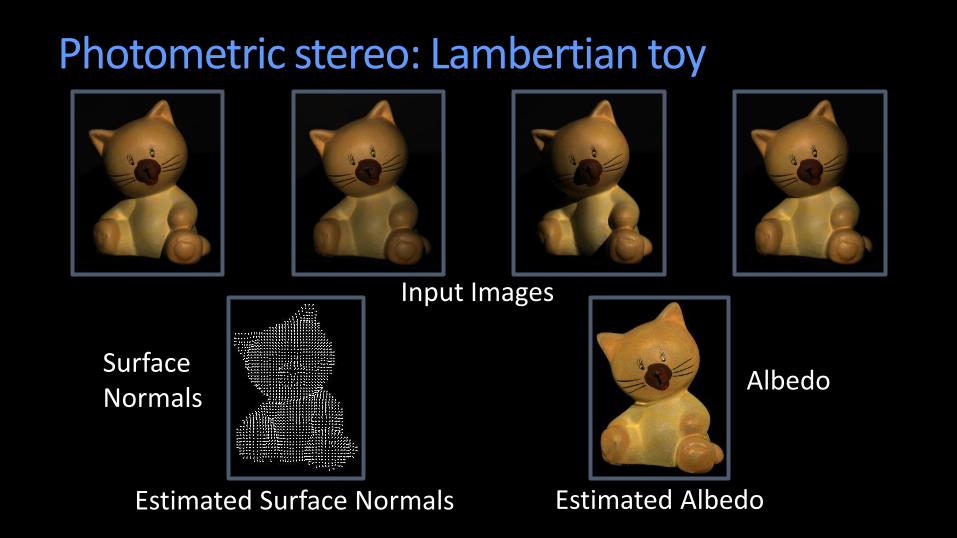
Photometric stereo: Lambertian toy
Input Images
Estimated Surface Normals Estimated Albedo
Surface Normals
Albedo

Photometric stereo: Limitations
Big problems • Doesn’t work for shiny things, semi-translucent things • Shadows, inter-reflections Smaller problems • Camera and lights have to be distant • Calibration requirements
– Measure light source directions, intensities – Camera response function
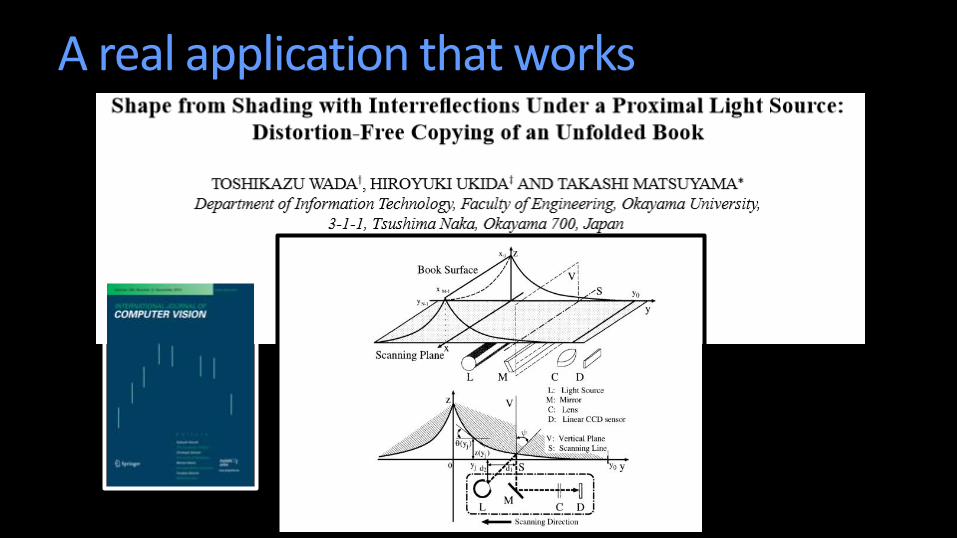
A real application that works
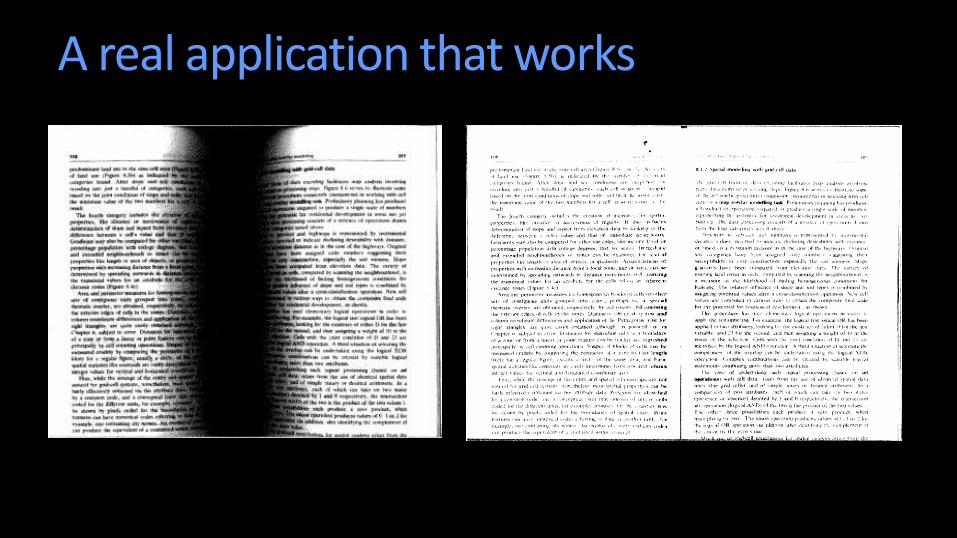
A real application that works
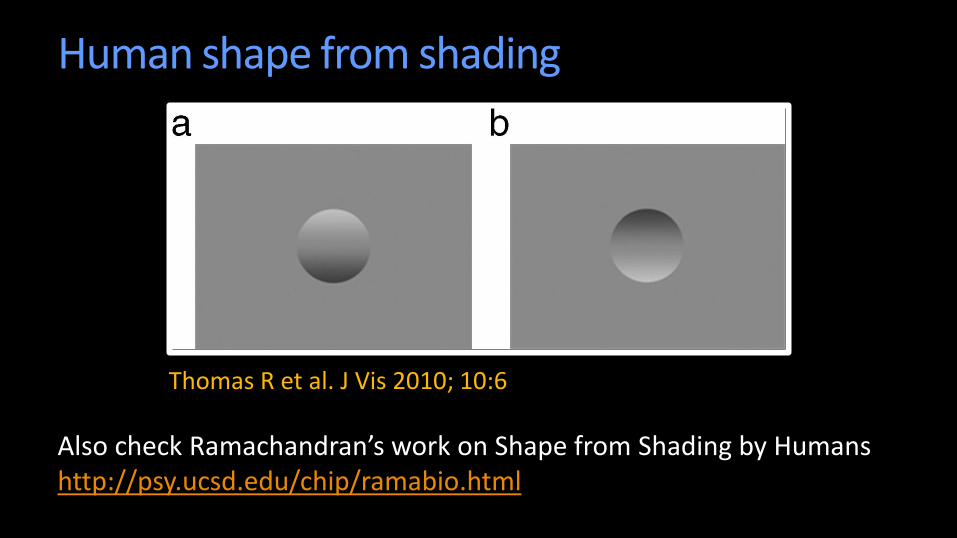
Human shape from shading
Thomas R et al. J Vis 2010; 10:6
Also check Ramachandran’s work on Shape from Shading by Humans http://psy.ucsd.edu/chip/ramabio.html