cs559: computer graphics lecture 9: projection li zhang spring 2008
TRANSCRIPT

CS559 Computer Graphics
Lecture 9 ProjectionLi Zhang
Spring 2008
Todaybull Projection
bull Reading ndash Shirley ch 7
Geometric Interpretation 3D Rotations
bull Can construct rotation matrix from 3 orthonormal vectorsbull Rows of matrix are 3 unit vectors of new coord framebull Effectively projections of point into new coord frame
u u u
uvw v v v u u u
w w w
x y z
R x y z u x X y Y z Z
x y z
u u u p
v v v p
w w w p
x y z x
Rp x y z y
x y z z
u p
v p
w p
The 3D synthetic camera model
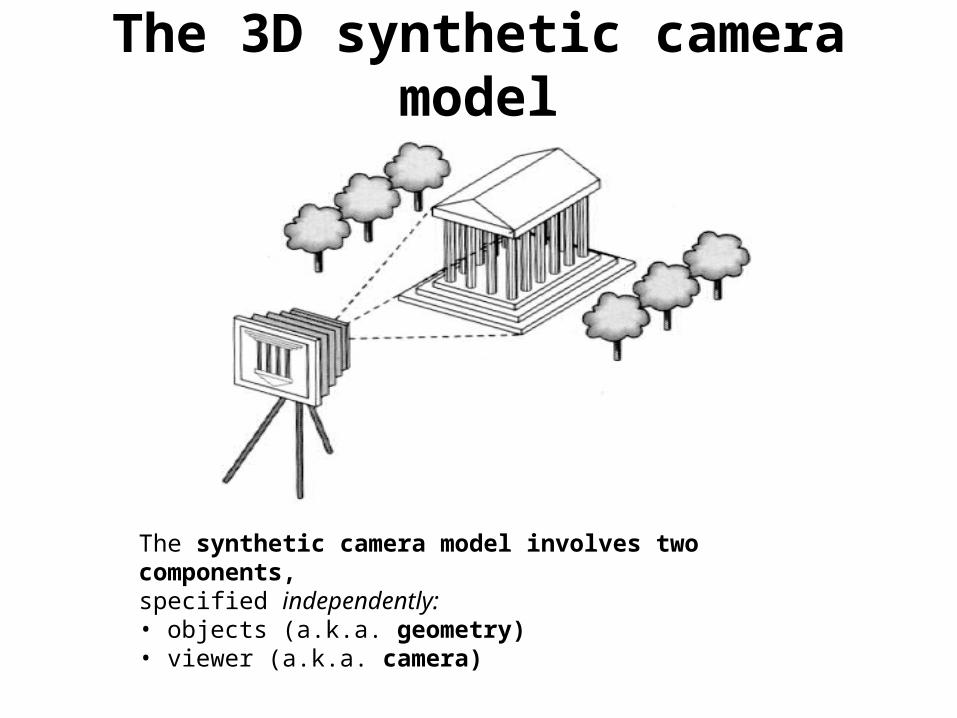
The synthetic camera model involves two componentsspecified independentlybull objects (aka geometry)bull viewer (aka camera)
Imaging with the synthetic camera
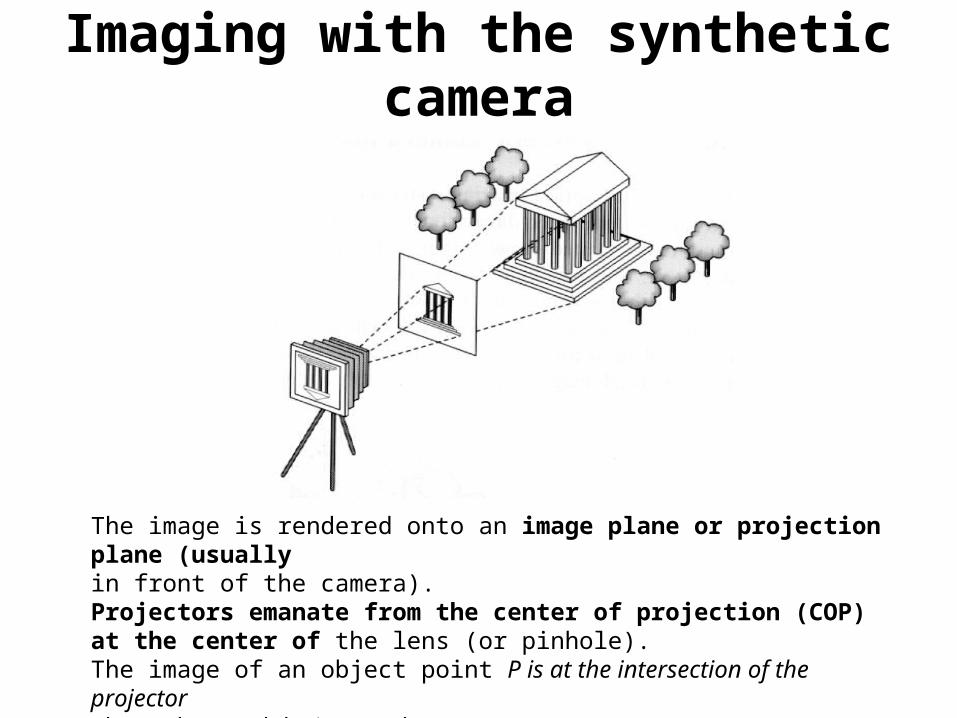
The image is rendered onto an image plane or projection plane (usuallyin front of the camera)Projectors emanate from the center of projection (COP) at the center of the lens (or pinhole)The image of an object point P is at the intersection of the projectorthrough P and the image plane
Specifying a viewer
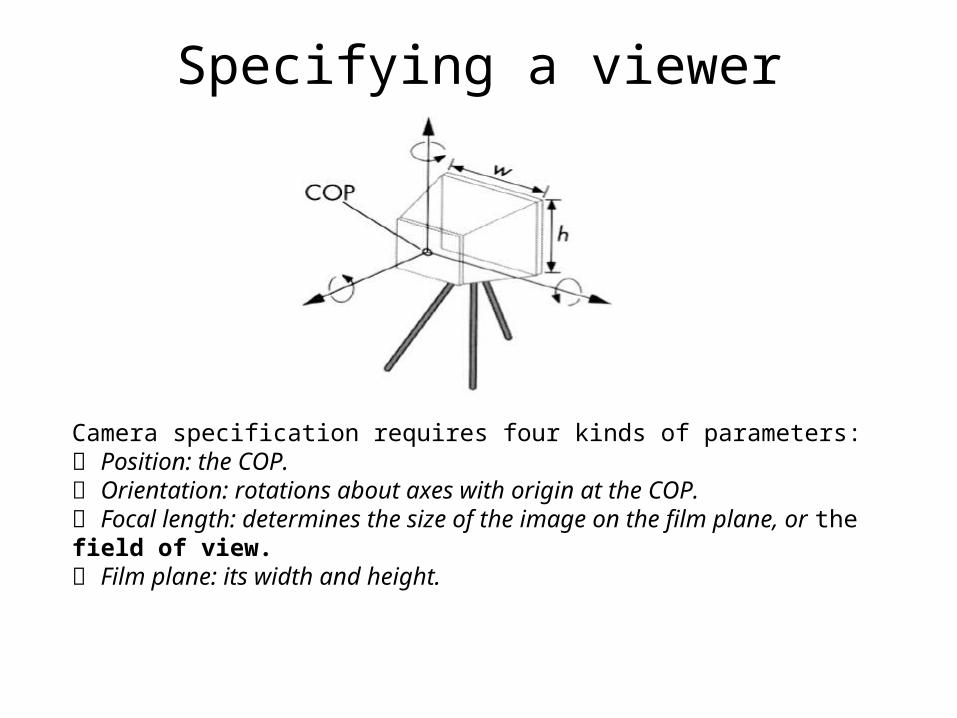
Camera specification requires four kinds of parameters1048714 Position the COP1048714 Orientation rotations about axes with origin at the COP1048714 Focal length determines the size of the image on the film plane or the field of view1048714 Film plane its width and height
3D Geometry Pipeline
Model Space(Object Space) World Space
Rotation Translation
Resizing
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Todaybull Projection
bull Reading ndash Shirley ch 7
Geometric Interpretation 3D Rotations
bull Can construct rotation matrix from 3 orthonormal vectorsbull Rows of matrix are 3 unit vectors of new coord framebull Effectively projections of point into new coord frame
u u u
uvw v v v u u u
w w w
x y z
R x y z u x X y Y z Z
x y z
u u u p
v v v p
w w w p
x y z x
Rp x y z y
x y z z
u p
v p
w p
The 3D synthetic camera model
The synthetic camera model involves two componentsspecified independentlybull objects (aka geometry)bull viewer (aka camera)
Imaging with the synthetic camera
The image is rendered onto an image plane or projection plane (usuallyin front of the camera)Projectors emanate from the center of projection (COP) at the center of the lens (or pinhole)The image of an object point P is at the intersection of the projectorthrough P and the image plane
Specifying a viewer
Camera specification requires four kinds of parameters1048714 Position the COP1048714 Orientation rotations about axes with origin at the COP1048714 Focal length determines the size of the image on the film plane or the field of view1048714 Film plane its width and height
3D Geometry Pipeline
Model Space(Object Space) World Space
Rotation Translation
Resizing
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Geometric Interpretation 3D Rotations
bull Can construct rotation matrix from 3 orthonormal vectorsbull Rows of matrix are 3 unit vectors of new coord framebull Effectively projections of point into new coord frame
u u u
uvw v v v u u u
w w w
x y z
R x y z u x X y Y z Z
x y z
u u u p
v v v p
w w w p
x y z x
Rp x y z y
x y z z
u p
v p
w p
The 3D synthetic camera model
The synthetic camera model involves two componentsspecified independentlybull objects (aka geometry)bull viewer (aka camera)
Imaging with the synthetic camera
The image is rendered onto an image plane or projection plane (usuallyin front of the camera)Projectors emanate from the center of projection (COP) at the center of the lens (or pinhole)The image of an object point P is at the intersection of the projectorthrough P and the image plane
Specifying a viewer
Camera specification requires four kinds of parameters1048714 Position the COP1048714 Orientation rotations about axes with origin at the COP1048714 Focal length determines the size of the image on the film plane or the field of view1048714 Film plane its width and height
3D Geometry Pipeline
Model Space(Object Space) World Space
Rotation Translation
Resizing
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
The 3D synthetic camera model
The synthetic camera model involves two componentsspecified independentlybull objects (aka geometry)bull viewer (aka camera)
Imaging with the synthetic camera
The image is rendered onto an image plane or projection plane (usuallyin front of the camera)Projectors emanate from the center of projection (COP) at the center of the lens (or pinhole)The image of an object point P is at the intersection of the projectorthrough P and the image plane
Specifying a viewer
Camera specification requires four kinds of parameters1048714 Position the COP1048714 Orientation rotations about axes with origin at the COP1048714 Focal length determines the size of the image on the film plane or the field of view1048714 Film plane its width and height
3D Geometry Pipeline
Model Space(Object Space) World Space
Rotation Translation
Resizing
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
Imaging with the synthetic camera
The image is rendered onto an image plane or projection plane (usuallyin front of the camera)Projectors emanate from the center of projection (COP) at the center of the lens (or pinhole)The image of an object point P is at the intersection of the projectorthrough P and the image plane
Specifying a viewer
Camera specification requires four kinds of parameters1048714 Position the COP1048714 Orientation rotations about axes with origin at the COP1048714 Focal length determines the size of the image on the film plane or the field of view1048714 Film plane its width and height
3D Geometry Pipeline
Model Space(Object Space) World Space
Rotation Translation
Resizing
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
Specifying a viewer
Camera specification requires four kinds of parameters1048714 Position the COP1048714 Orientation rotations about axes with origin at the COP1048714 Focal length determines the size of the image on the film plane or the field of view1048714 Film plane its width and height
3D Geometry Pipeline
Model Space(Object Space) World Space
Rotation Translation
Resizing
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

3D Geometry Pipeline
Model Space(Object Space) World Space
Rotation Translation
Resizing
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
px eex
World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

World -gt eye transformationbull Letrsquos look at how we would compute the
world-gteye transformation
ex
wx
wx
ezey
wy
e
exez
ey
p
p
p
)( epx eex
)( epy eey
)( epz eez
1000
|100
010
|001
1000
0
0
0
T
T
T
e
z
y
x
Me
e
e
v
How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

How to specify eye coordinate
e
p
u ep
epz
eex
ezey
e
ee zu
zux
ee
eee xz
xzy
1 Give eye location e2 Give target position p3 Give upward direction u
OpenGL has a helper command gluLookAt (eyex eyey eyez px py pz upx upy upz )
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
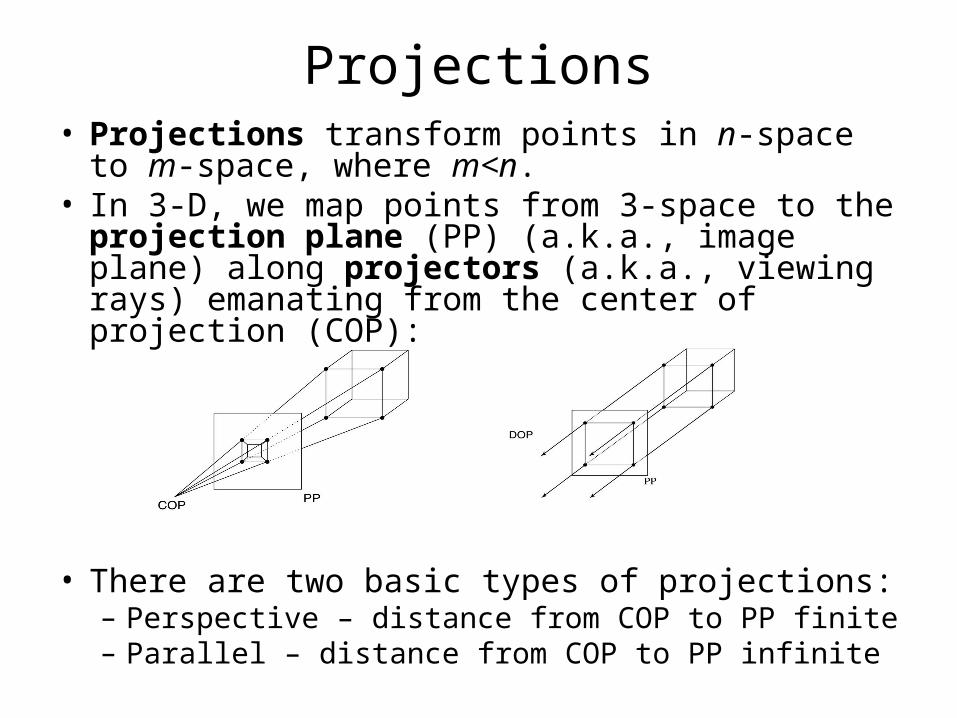
Projectionsbull Projections transform points in n-space to m-space
where mltnbull In 3-D we map points from 3-space to the projection
plane (PP) (aka image plane) along projectors (aka viewing rays) emanating from the center of projection (COP)
bull There are two basic types of projectionsndash Perspective ndash distance from COP to PP finitendash Parallel ndash distance from COP to PP infinite
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Parallel projectionsbull For parallel projections we specify a direction of
projection (DOP) instead of a COPbull We can write orthographic projection onto the z=0
plane with a simple matrix such that xrsquo=x yrsquo=y
bull Normally we do not drop the z value right away Why not
1 0 0 0
0 1 0 0
1 0 0 0 11
xx
yy
z
bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

bull Properties of parallel projectionndash Are actually a kind of affine transformation
bull Parallel lines remain parallelbull Ratios are preservedbull Angles not (in general) preserved
ndash Not realistic lookingndash Good for exact measurements
Most often used in bull CAD bull architectural drawings bull etc
where taking exact measurement is important
Properties of parallel projection
Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Perspective effect
Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Perspective Illusion
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
Perspective Illusion
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
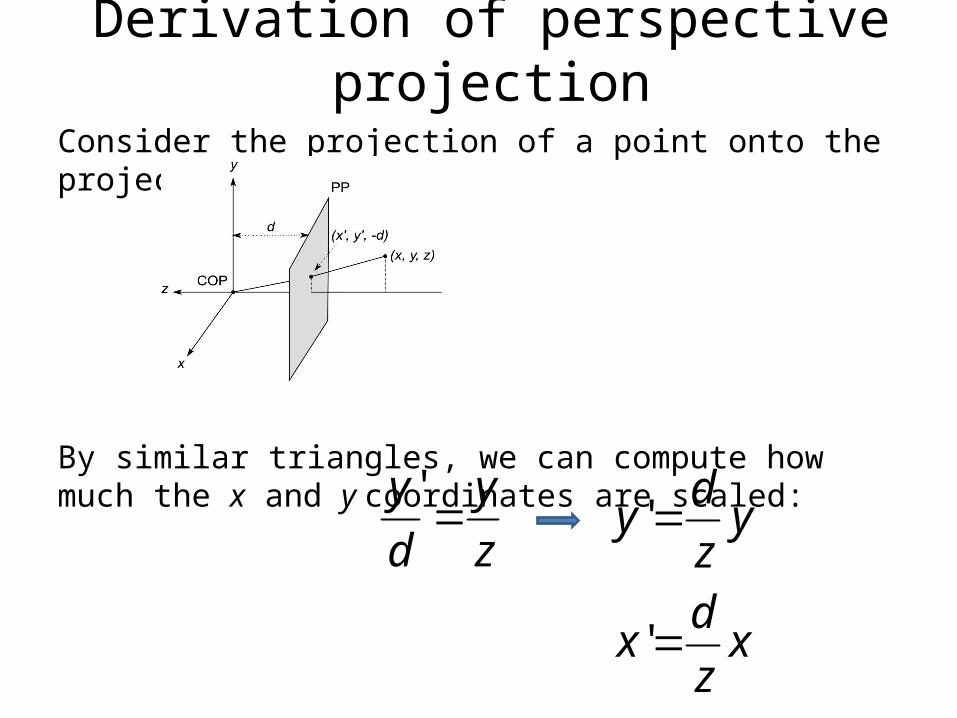
Derivation of perspective projection
Consider the projection of a point onto the projection plane
By similar triangles we can compute how much the x and y coordinates are scaled
z
y
d
y
yz
dy
xz
dx
Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Homogeneous coordinates and perspective projection
Now we can re-write the perspective projection as a matrix equation
1
)(
)(
1
yzd
xzd
y
x
dz
y
x
1
z
y
x
10100
0100
0010
0001
1000
0010
0001
z
y
x
d
1
)(
)(
d
yzd
xzd
dz
z
y
x
0100
0010
0001
d
Orthographic projection
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
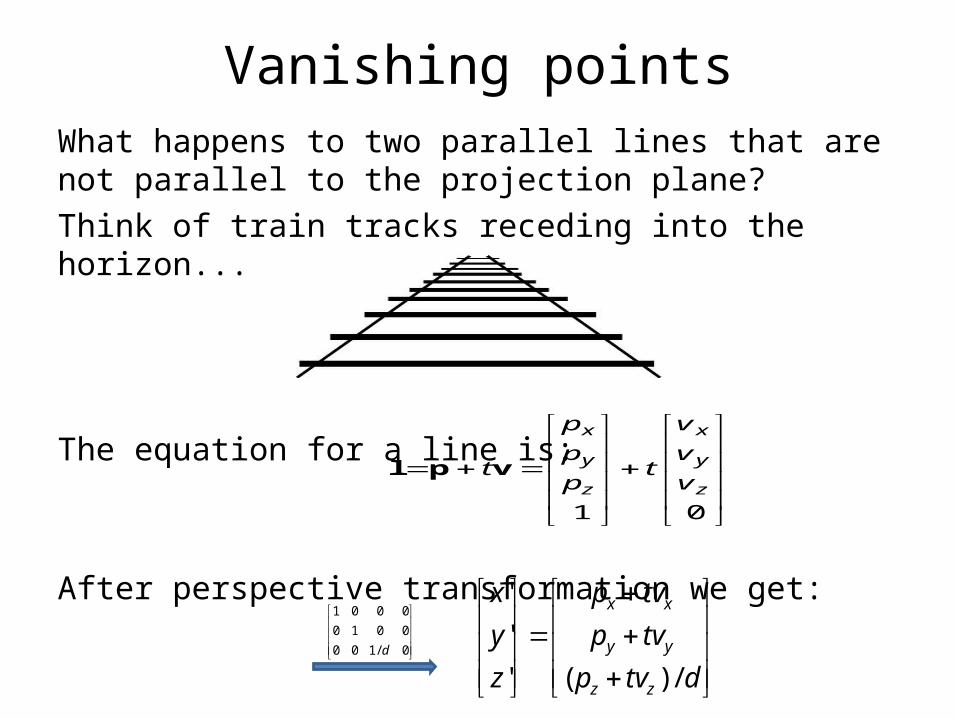
Vanishing pointsWhat happens to two parallel lines that are not parallel to the projection planeThink of train tracks receding into the horizon
The equation for a line is
After perspective transformation we get1 0
x x
y y
z z
p v
p vt t
p v
l p v
0100
0010
0001
d
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
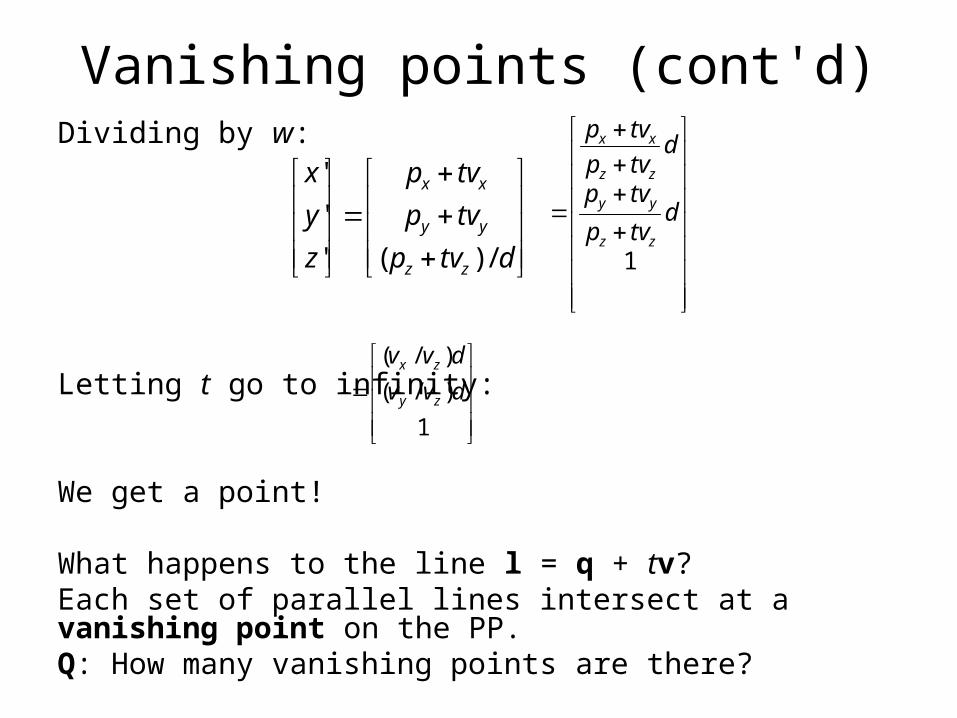
Vanishing points (contd)Dividing by w
Letting t go to infinity
We get a point
What happens to the line l = q + tvEach set of parallel lines intersect at a vanishing point on the PP Q How many vanishing points are there
1
)(
)(
dvv
dvv
zy
zx
dtvp
tvp
tvp
z
y
x
zz
yy
xx
)(
1
dtvp
tvp
dtvp
tvp
zz
yy
zz
xx
Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Vanishing points
Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Vanishing points
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
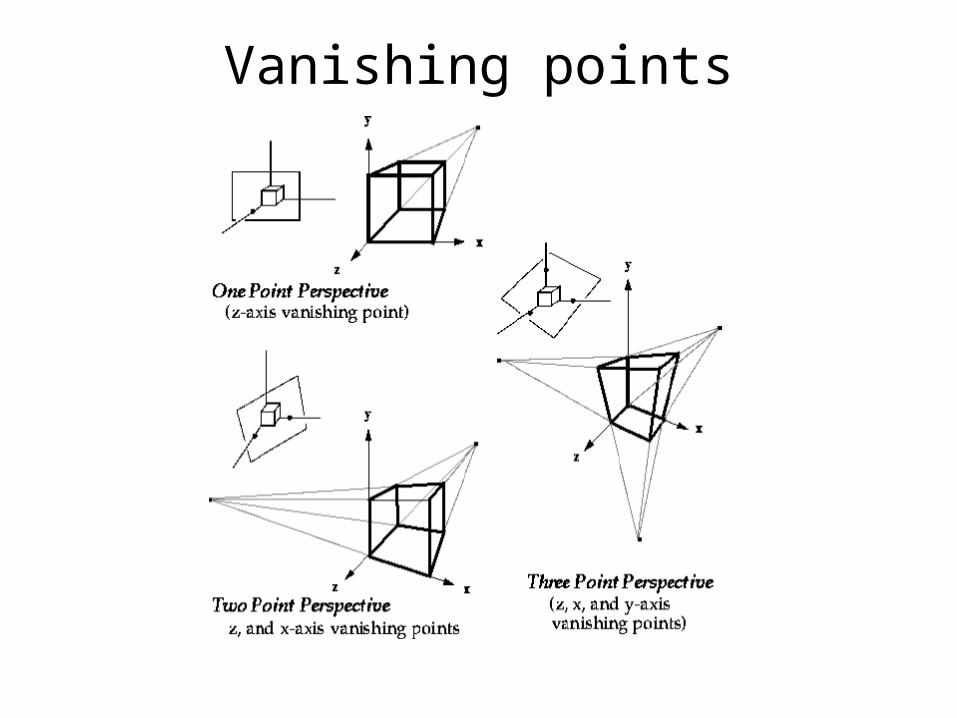
Vanishing points
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
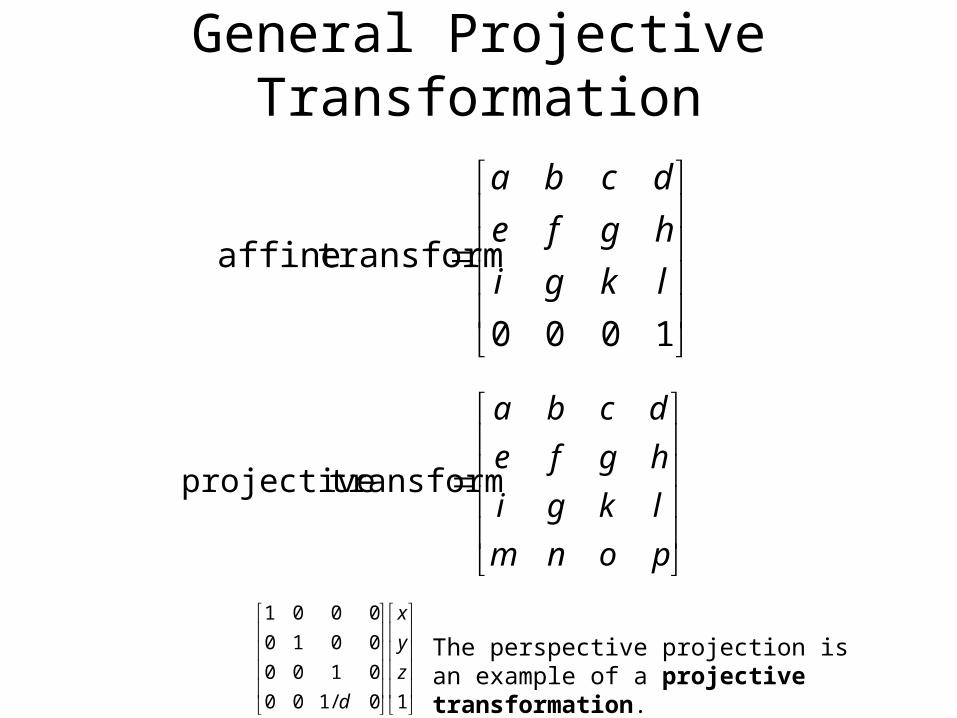
General Projective Transformation
ponm
lkgi
hgfe
dcba
transformprojective
1000
transformaffinelkgi
hgfe
dcba
The perspective projection is an example of a projective transformation
10100
0100
0010
0001
z
y
x
d
Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Properties of perspective projections
Here are some properties of projective transformations
ndash Lines map to linesndash Parallel lines do not necessarily remain parallelndash Ratios are not preserved
One of the advantages of perspective projection is that size varies inversely with distance ndash looks realisticA disadvantage is that we cant judge distances as exactly as we can with parallel projections
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Clipping and the viewing frustumThe center of projection and the portion of the projection plane that map to the final image form an infinite pyramid The sides of the pyramid are clipping planesFrequently additional clipping planes are inserted to restrict the range of depths These clipping planes are called the near and far or the hither and yon clipping planes
All of the clipping planes bound the viewing frustum
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
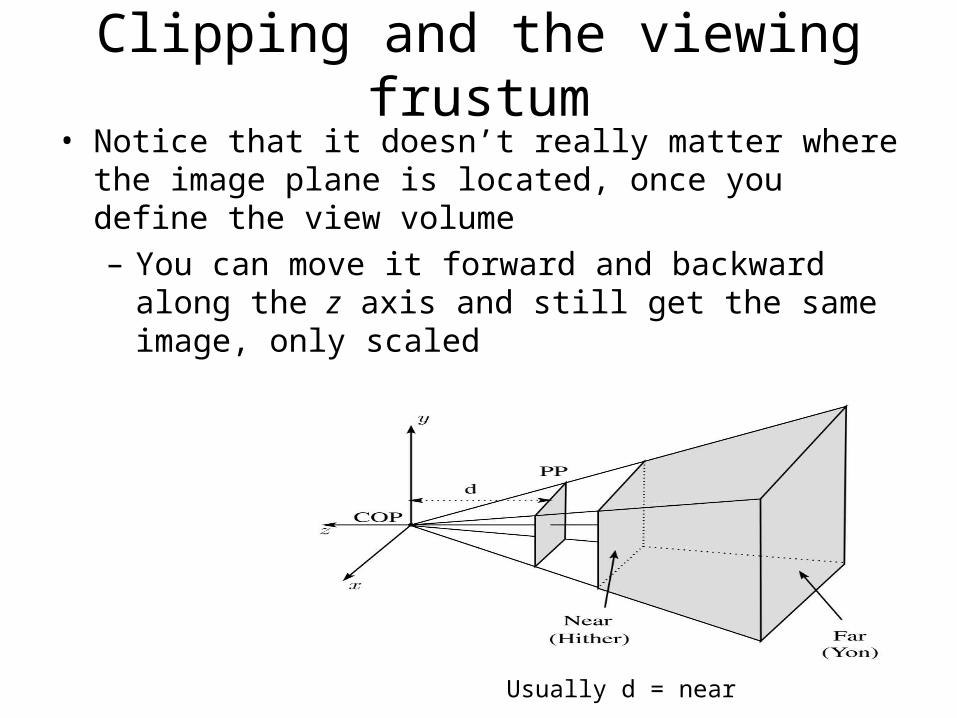
Clipping and the viewing frustumbull Notice that it doesnrsquot really matter where the image plane is
located once you define the view volumendash You can move it forward and backward along the z axis and
still get the same image only scaled
Usually d = near
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
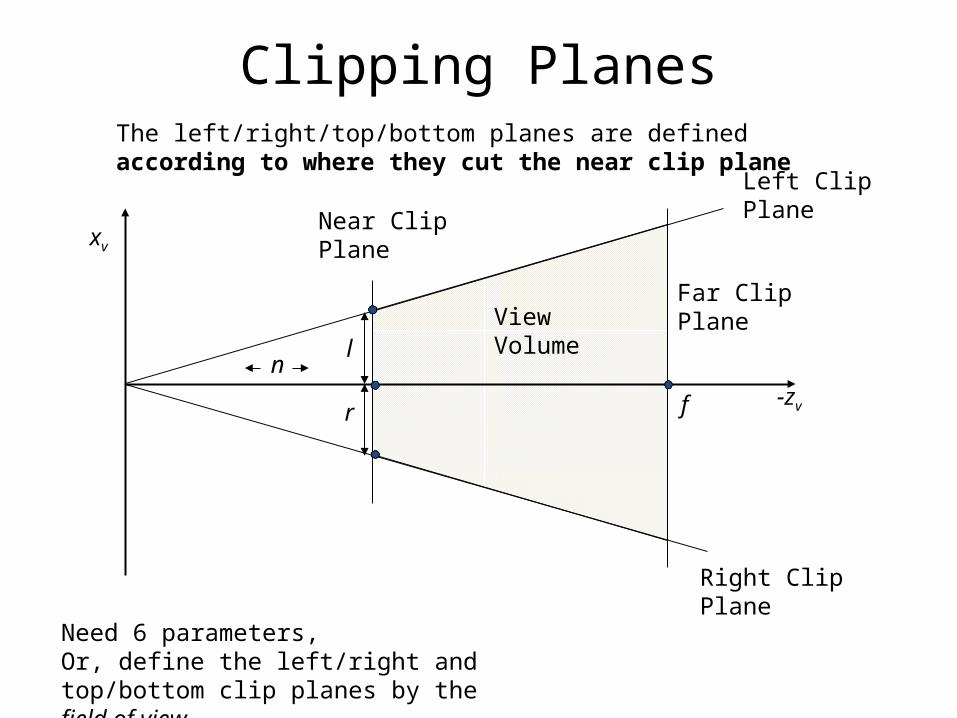
Clipping Planes
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
nl
r
The leftrighttopbottom planes are defined according to where they cut the near clip plane
Need 6 parametersOr define the leftright and topbottom clip planes by the field of view
Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Field of View
xv
-zv
Near Clip Plane
Far Clip PlaneView
Volume
Left ClipPlane
Right ClipPlane
f
FOV
Assumes a symmetric view volume
Need 4 parametersOr define the near far fov aspect ratio
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
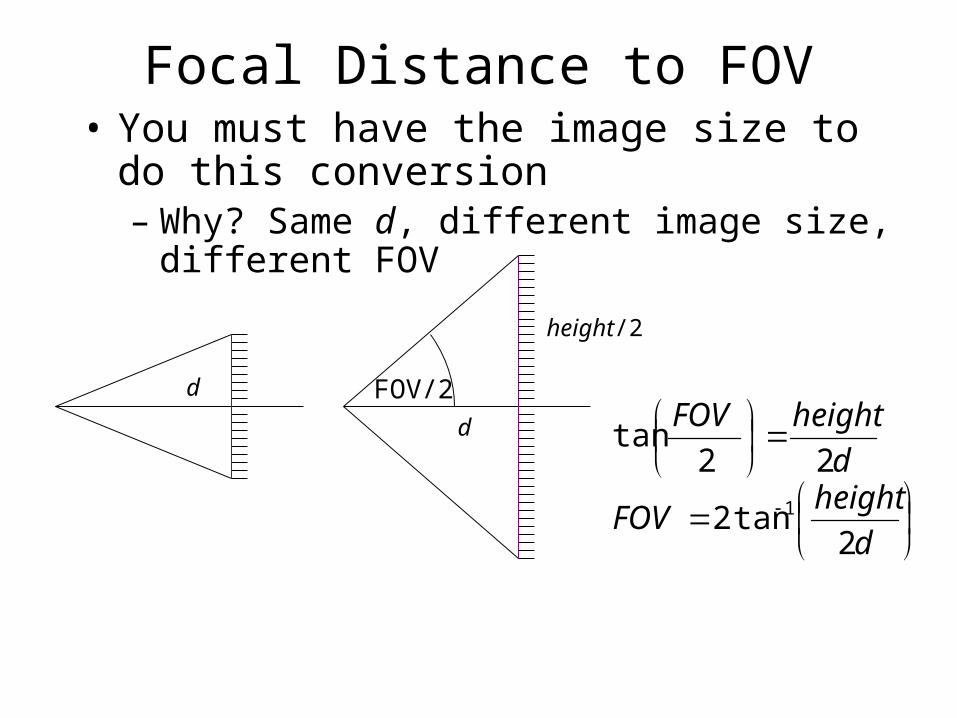
Focal Distance to FOVbull You must have the image size to do this
conversionndash Why Same d different image size different FOV
d
d
FOV2
height2
d
heightFOV
d
heightFOV
2tan2
22tan
1
Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Perspective Parametersbull We have seen three different ways to describe a
perspective camerandash Clipping planes Field of View Focal distance
bull The most general is clipping planes ndash they directly describe the region of space you are viewing
bull For most graphics applications field of view is the most convenient
bull You can convert one thing to another
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
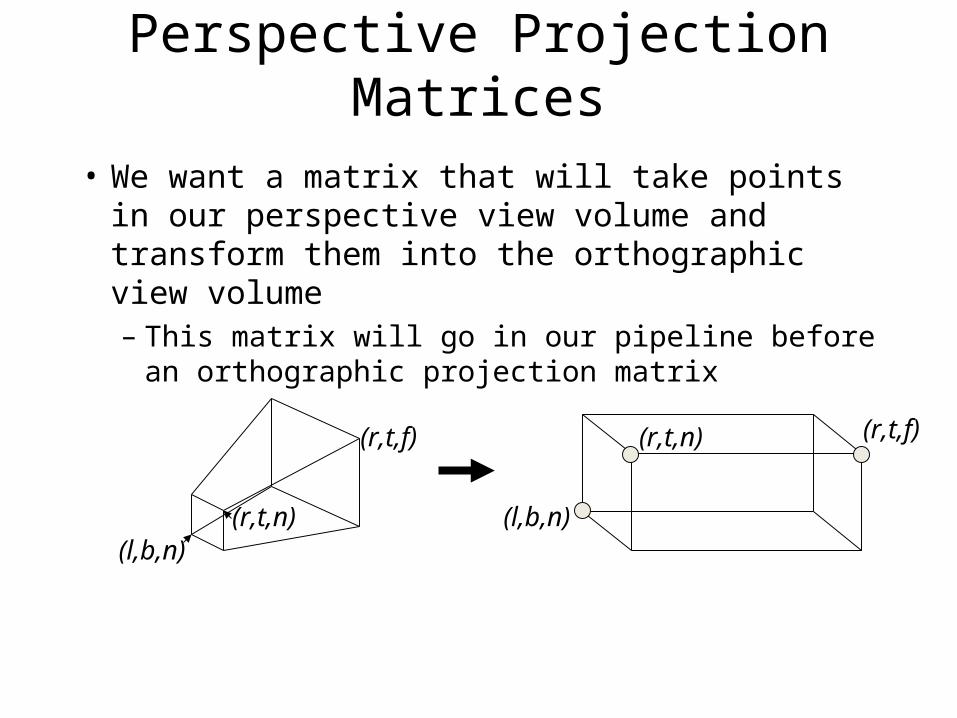
Perspective Projection Matrices
bull We want a matrix that will take points in our perspective view volume and transform them into the orthographic view volumendash This matrix will go in our pipeline before an
orthographic projection matrix
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Mapping Lines
bull We want to map all the lines through the center of projection to parallel linesndash This converts the perspective case to
the orthographic case we can use all our existing methods
bull The relative intersection points of lines with the near clip plane should not change
bull The matrix that does this looks like the matrix for our simple perspective case
nf
-zy
How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

How to get this mapping
0100
00
0010
0001
n
BAM
1
)(
1
BAn
y
x
n
y
x
M
1
))((
)(
)(
1
BAffn
yfn
xfn
f
y
x
Mn ffBn
fA
1
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
nf
-zy
Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Properties of this mapping
0100
)(00
0010
0001
n
fnfnM
111
z
fnnf
z
nyz
nx
z
y
x
Mz
y
xIf z = n M(xyz1) = [xyz1] near plane is unchanged
If xz = c1 yz = c2 then xrsquo=nc1 yrsquo=nc2 bending converging rays to parallel rays
If z1 lt z2 z1rsquo lt z2rsquo z ordering is preserved
nf
-zy
1
)(
)(
10100
0100
0010
0001
n
yzn
xzn
z
y
x
n
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-
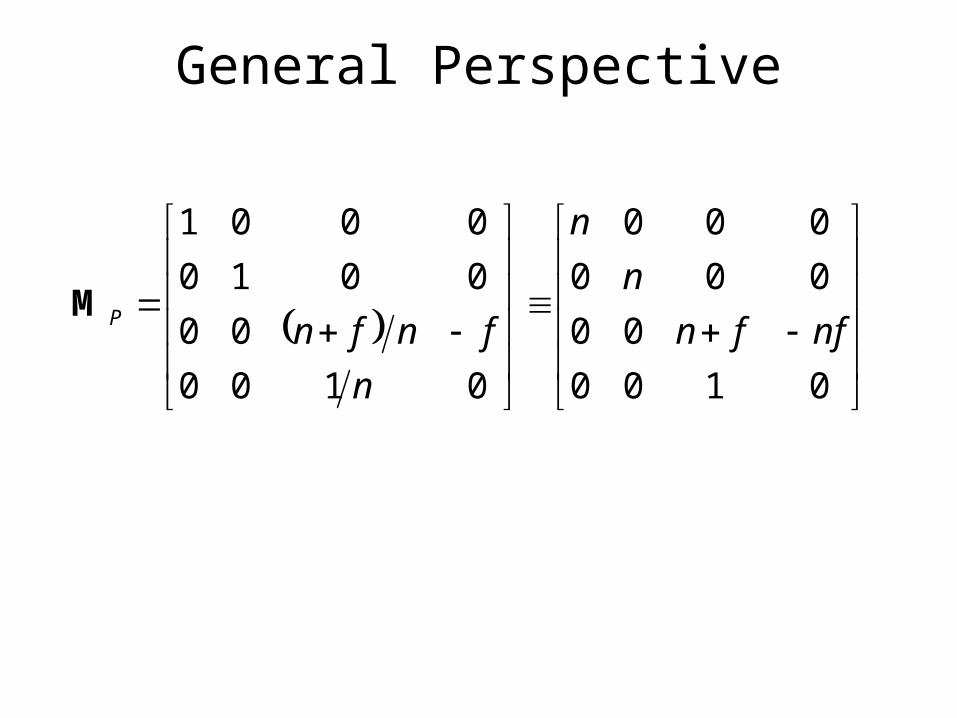
General Perspective
0100
00
000
000
0100
00
0010
0001
nffn
n
n
n
fnfnPM
To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

To Canonical view volume
bull Perspective projection transforms a pyramid volume to an orthographic view volume
(lbn)(rtn) (lbn)
(rtn) (rtf)(rtf)
(1-11)
(-11-1)
Canonical view volume [-11]^3
Rotate translate
Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Orthographic View to Canonical Matrix
1000
2100
2010
2001
1000
0200
0020
0002
1
fn
bt
lr
fn
bt
lr
z
y
x
canonical
canonical
canonical
Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Orthographic View to Canonical Matrix
viewcanonicalviewcanonical
view
view
view
canonical
canonical
canonical
z
y
x
fnfnfn
btbtbt
lrlrlr
fn
bt
lr
fn
bt
lr
z
y
x
xMx
11000
200
020
002
1000
2100
2010
2001
1000
0200
0020
0002
1
Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Complete Perspective Projection bull After applying the perspective matrix we map
the orthographic view volume to the canonical view volume
0100
00
000
000
1000
200
02
0
002
nffn
n
n
fn
fn
fn
bt
bt
bt
lr
lr
lr
POcanonicalview MMM
worldcanonicalworldcanonical
viewworldcanonicalviewcanonicalworld
xMx
MMM
3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

3D Geometry Pipeline
Model Space(Object Space) World Space Eye Space
(View Space)Rotation
TranslationResizing
Rotation Translation
ProjectiveScale
Translation
3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

3D Geometry Pipeline (contrsquod)
Normalized ProjectionSpace
ProjectScreen Space (2D)
ScaleTranslation
Image Space (pixels)Raster Space
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Canonical Window Transform
(-1-1)
(11)
(xminymin)
(xmaxymax)
11000
0100
2020
2002
1
minmaxminmax
minmaxminmax
canonical
canonical
canonical
pixel
pixel
pixel
z
y
x
yyyy
xxxx
z
y
x
Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-

Mapping of Z is nonlinear
bull Many mappings proposed all have nonlinearitiesbull Advantage handles range of depths (10cm ndash 100m)bull Disadvantage depth resolution not uniformbull More close to near plane less further awaybull Common mistake set near = 0 far = infty Donrsquot do this
Canrsquot set near = 0 lose depth resolution
Az B BA
z z
- CS559 Computer Graphics
- Today
- Geometric Interpretation 3D Rotations
- The 3D synthetic camera model
- Imaging with the synthetic camera
- Specifying a viewer
- 3D Geometry Pipeline
- Slide 8
- 3D Geometry Pipeline (contrsquod)
- World -gt eye transformation
- Slide 11
- How to specify eye coordinate
- Projections
- Parallel projections
- Slide 15
- Properties of parallel projection
- Perspective effect
- Perspective Illusion
- Slide 19
- Derivation of perspective projection
- Homogeneous coordinates and perspective projection
- Vanishing points
- Vanishing points (contd)
- Slide 24
- Slide 25
- Slide 26
- General Projective Transformation
- Properties of perspective projections
- Slide 29
- Clipping and the viewing frustum
- Slide 31
- Clipping Planes
- Field of View
- Focal Distance to FOV
- Perspective Parameters
- Perspective Projection Matrices
- Mapping Lines
- How to get this mapping
- Properties of this mapping
- General Perspective
- To Canonical view volume
- Orthographic View to Canonical Matrix
- Slide 43
- Complete Perspective Projection
- Slide 45
- Slide 46
- Canonical Window Transform
- Slide 48
- Mapping of Z is nonlinear
-