deborah estrin //cens.ucla.edu/estrin [email protected]@cs.ucla.edu work summarized here is...
TRANSCRIPT
Deborah Estrin http://cens.ucla.edu/Estrin [email protected]
Work summarized here is largely that of students, staff, and other faculty at CENS
We gratefully acknowledge the support of our sponsors, including the National Science Foundation, Intel Corporation, Sun Inc., Crossbow Inc., and the participating campuses.
Center for Embedded Networked SensingUpdate, October 2004
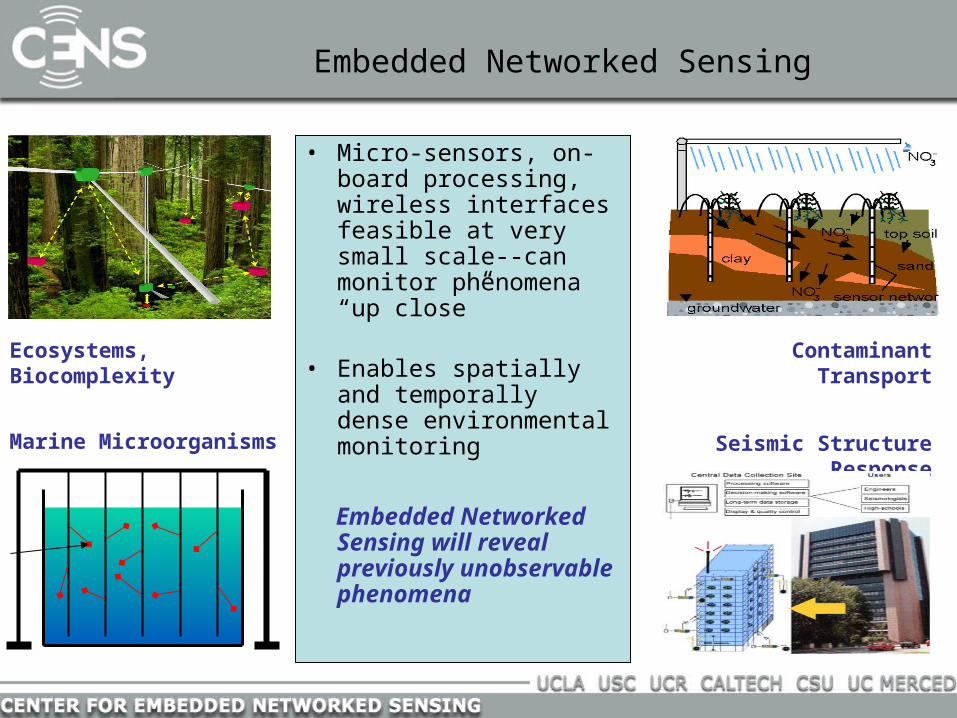
Embedded Networked Sensing
• Micro-sensors, on-board processing, wireless interfaces feasible at very small scale--can monitor phenomena “up close”
• Enables spatially and temporally dense environmental monitoring
Embedded Networked Sensing will reveal previously unobservable phenomena
Contaminant TransportEcosystems, Biocomplexity
Marine Microorganisms Seismic Structure Response
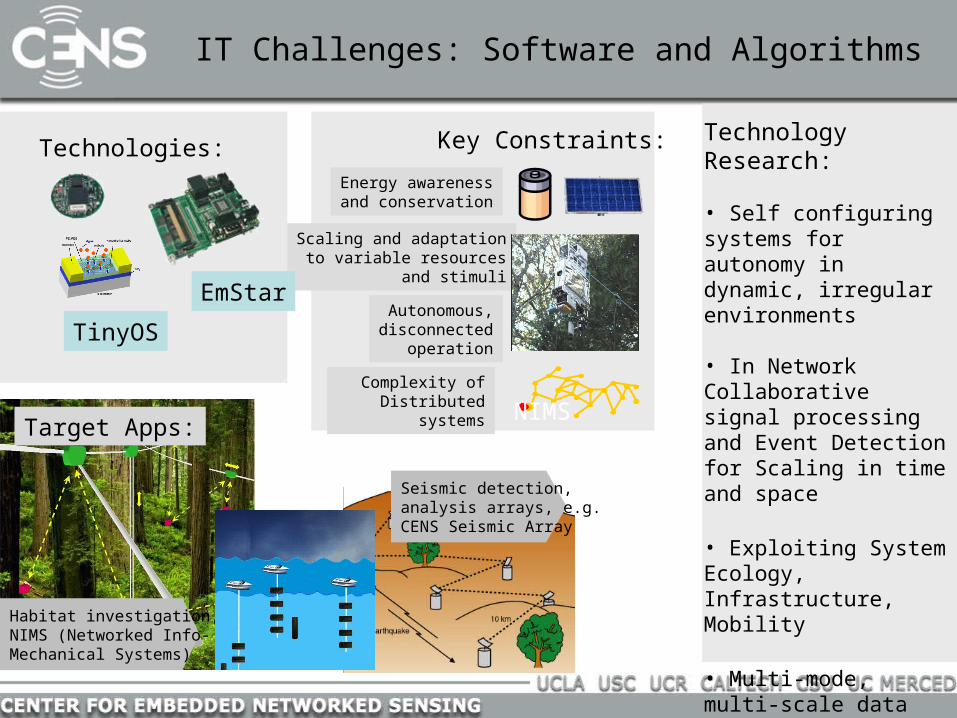
IT Challenges: Software and Algorithms
Key Constraints:
Energy awarenessand conservation
Scaling and adaptationto variable resources
and stimuli
Autonomous,disconnected
operation
Complexity ofDistributed systems
Technologies:
EmStar
TinyOS
Habitat investigation, e.gNIMS (Networked Info-Mechanical Systems)
Seismic detection,analysis arrays, e.g.CENS Seismic Array
NIMS
Seismic
Target Apps:
Technology Research:
• Self configuring systems for autonomy in dynamic, irregular environments
• In Network Collaborative signal processing and Event Detection for Scaling in time and space
• Exploiting System Ecology, Infrastructure, Mobility
• Multi-mode, multi-scale data fusion for tasking and interpretation
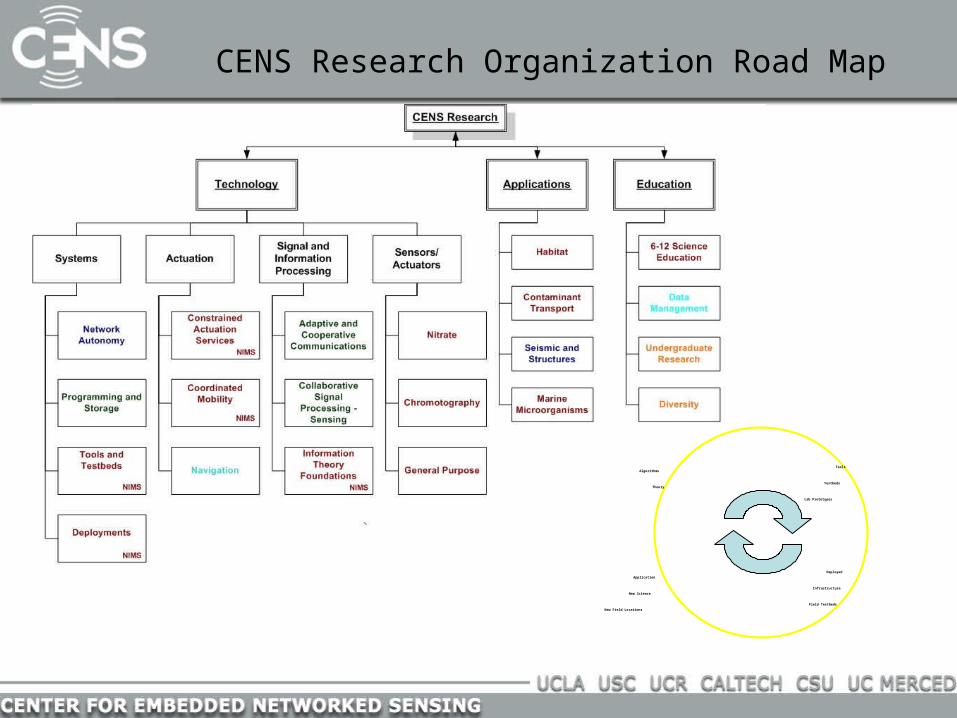
CENS Research Organization Road Map
Algorithms
Theory
Tools
Testbeds
Lab Prototypes
Deployed
Infrastructure
Field Testbeds
Application
New Science
New Field Locations
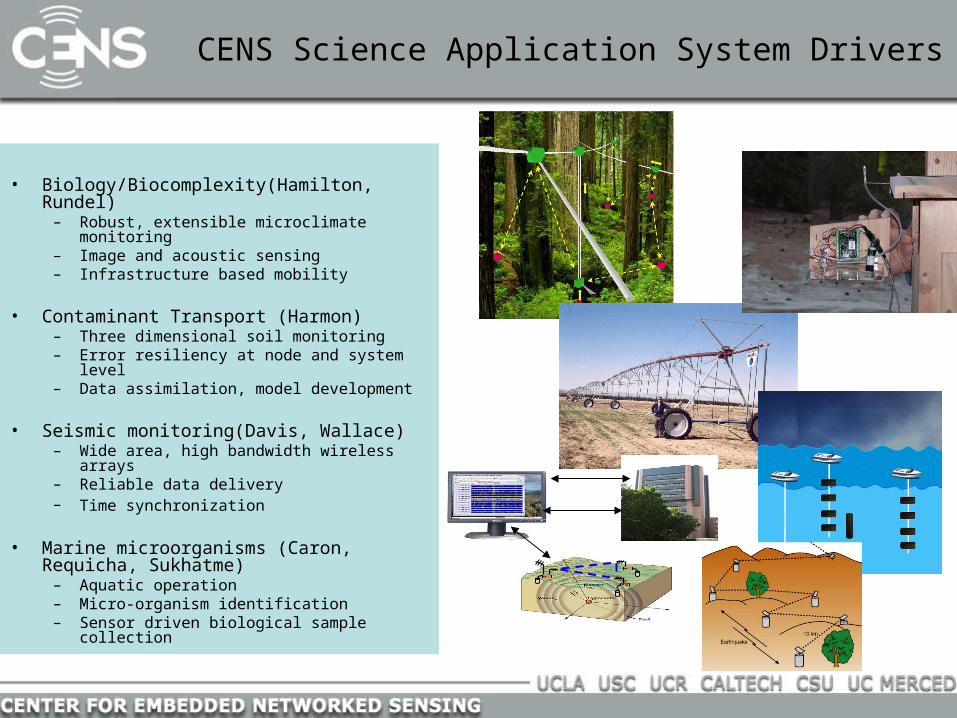
CENS Science Application System Drivers
• Biology/Biocomplexity(Hamilton, Rundel)– Robust, extensible microclimate monitoring– Image and acoustic sensing– Infrastructure based mobility
• Contaminant Transport (Harmon)– Three dimensional soil monitoring– Error resiliency at node and system level– Data assimilation, model development
• Seismic monitoring(Davis, Wallace)– Wide area, high bandwidth wireless arrays– Reliable data delivery – Time synchronization
• Marine microorganisms (Caron, Requicha, Sukhatme)
– Aquatic operation– Micro-organism identification– Sensor driven biological sample collection
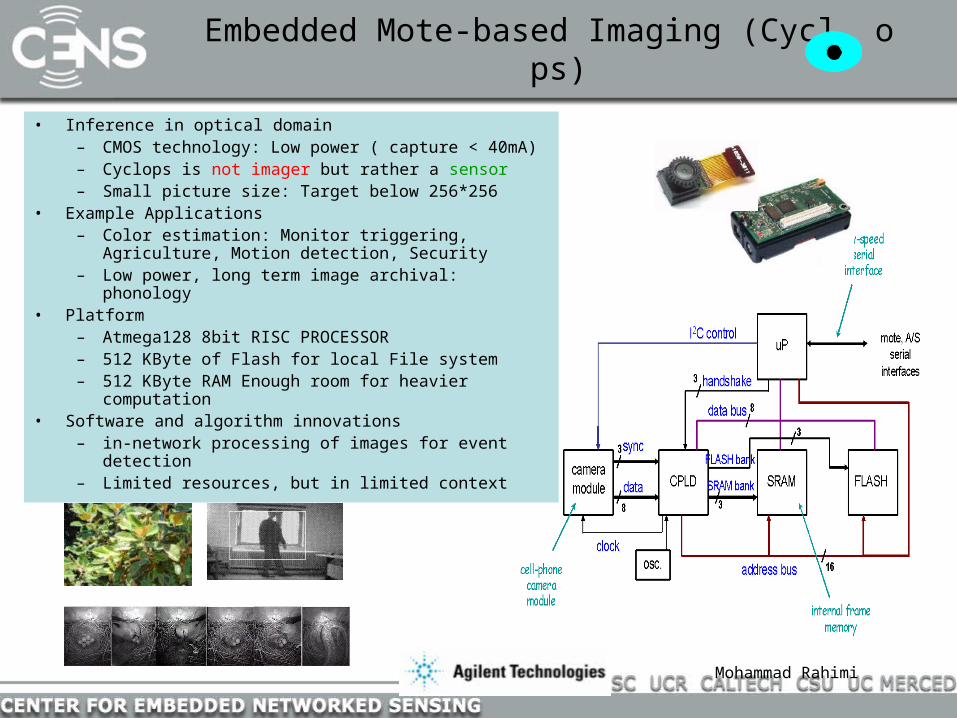
• Inference in optical domain– CMOS technology: Low power ( capture < 40mA)– Cyclops is not imager but rather a sensor– Small picture size: Target below 256*256
• Example Applications– Color estimation: Monitor triggering, Agriculture,
Motion detection, Security– Low power, long term image archival: phonology
• Platform– Atmega128 8bit RISC PROCESSOR– 512 KByte of Flash for local File system– 512 KByte RAM Enough room for heavier
computation• Software and algorithm innovations
– in-network processing of images for event detection– Limited resources, but in limited context
Embedded Mote-based Imaging (Cycl o ps)
Mohammad Rahimi
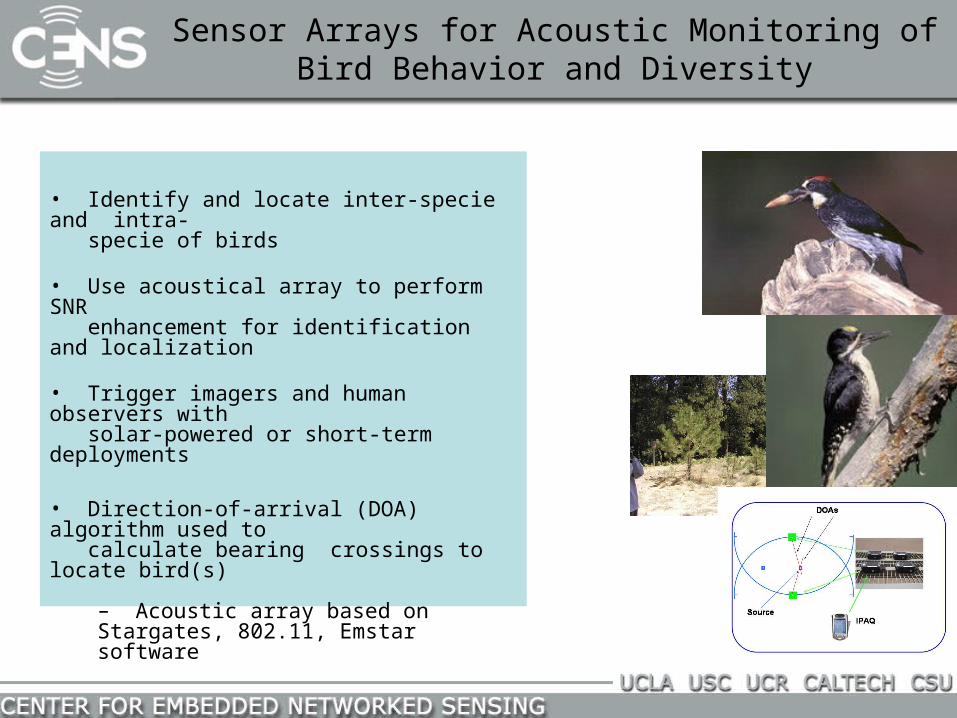
• Identify and locate inter-specie and intra- specie of birds
• Use acoustical array to perform SNR enhancement for identification and localization
• Trigger imagers and human observers with solar-powered or short-term deployments
• Direction-of-arrival (DOA) algorithm used to calculate bearing crossings to locate bird(s)
– Acoustic array based on Stargates, 802.11, Emstar software
– Near-optimal Approximate Maximum-Likelihood based algorithm
Sensor Arrays for Acoustic Monitoring of Bird Behavior and Diversity
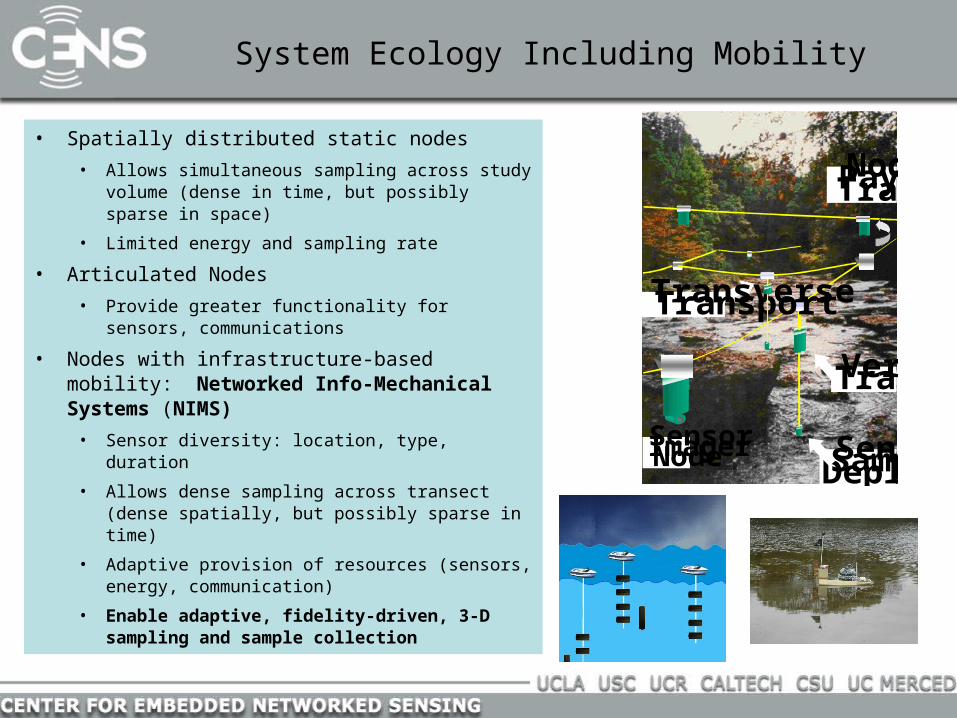
System Ecology Including Mobility
• Spatially distributed static nodes
• Allows simultaneous sampling across study volume (dense in time, but possibly sparse in space)
• Limited energy and sampling rate
• Articulated Nodes
• Provide greater functionality for sensors, communications
• Nodes with infrastructure-based mobility: Networked Info-Mechanical Systems (NIMS)
• Sensor diversity: location, type, duration
• Allows dense sampling across transect (dense spatially, but possibly sparse in time)
• Adaptive provision of resources (sensors, energy, communication)
• Enable adaptive, fidelity-driven, 3-D sampling and sample collection
Sensor-SamplingDeploymentSensorImagerNode
NodePayloadTransfer
TransverseTransport
VerticalTransport
Sensor-SamplingDeploymentSensorImagerNode
NodePayloadTransfer
TransverseTransport
VerticalTransport
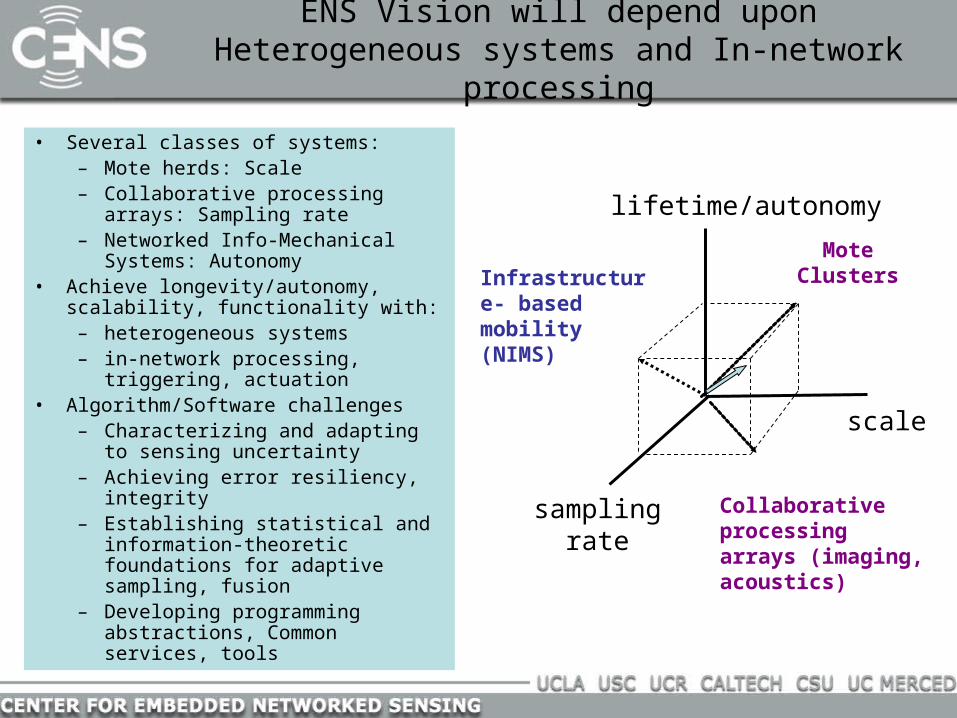
ENS Vision will depend uponHeterogeneous systems and In-network processing
• Several classes of systems: – Mote herds: Scale– Collaborative processing arrays:
Sampling rate– Networked Info-Mechanical
Systems: Autonomy• Achieve longevity/autonomy, scalability,
functionality with:– heterogeneous systems– in-network processing, triggering,
actuation• Algorithm/Software challenges
– Characterizing and adapting to sensing uncertainty
– Achieving error resiliency, integrity– Establishing statistical and
information-theoretic foundations for adaptive sampling, fusion
– Developing programming abstractions, Common services, tools
lifetime/autonomy
scale
Collaborative processing arrays (imaging, acoustics)
Infrastructure- based mobility(NIMS)
samplingrate
Mote Clusters
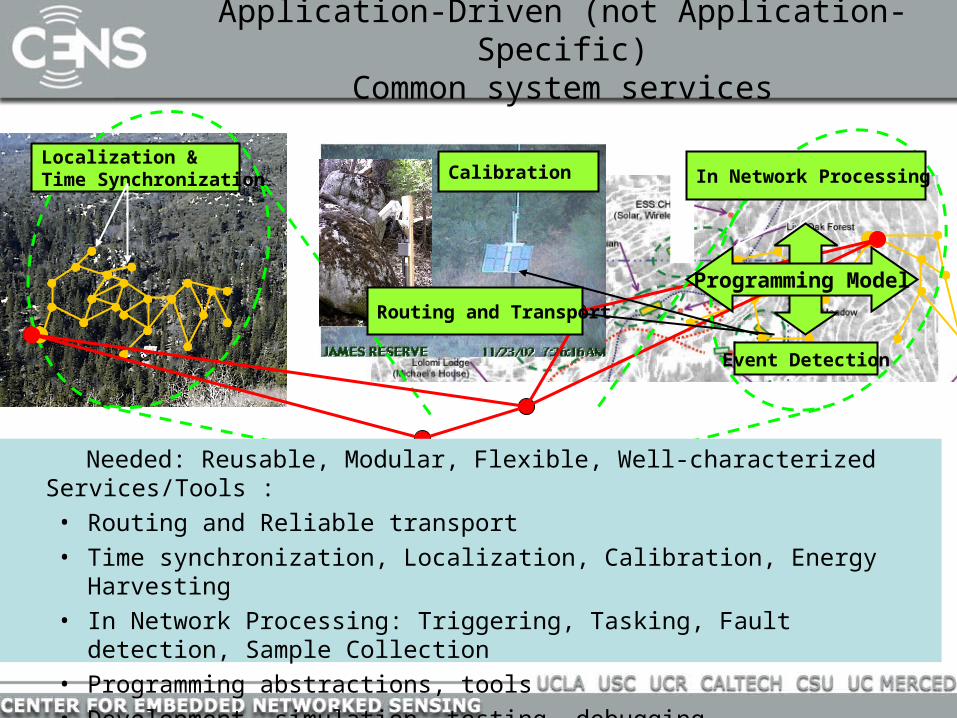
Event Detection
Localization &Time Synchronization Calibration
Programming Model
In Network Processing
Needed: Reusable, Modular, Flexible, Well-characterized Services/Tools :
• Routing and Reliable transport
• Time synchronization, Localization, Calibration, Energy Harvesting
• In Network Processing: Triggering, Tasking, Fault detection, Sample Collection
• Programming abstractions, tools
• Development, simulation, testing, debugging
Routing and Transport
Application-Driven (not Application-Specific)Common system services
Nati
on
al Ecolo
gic
al O
bserv
ato
ry N
etw
ork
(N
EO
N)
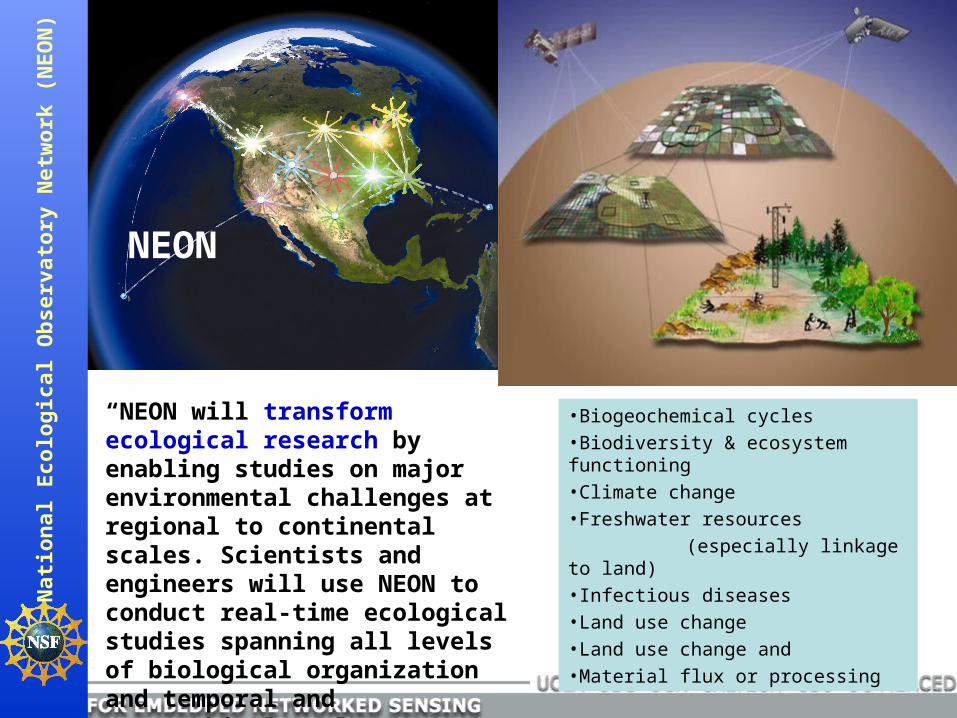
NEON
“NEON will transform ecological research by enabling studies on major environmental challenges at regional to continental scales. Scientists and engineers will use NEON to conduct real-time ecological studies spanning all levels of biological organization and temporal and geographical scales.
•Biogeochemical cycles•Biodiversity & ecosystem functioning•Climate change•Freshwater resources
(especially linkage to land)•Infectious diseases•Land use change•Land use change and •Material flux or processing
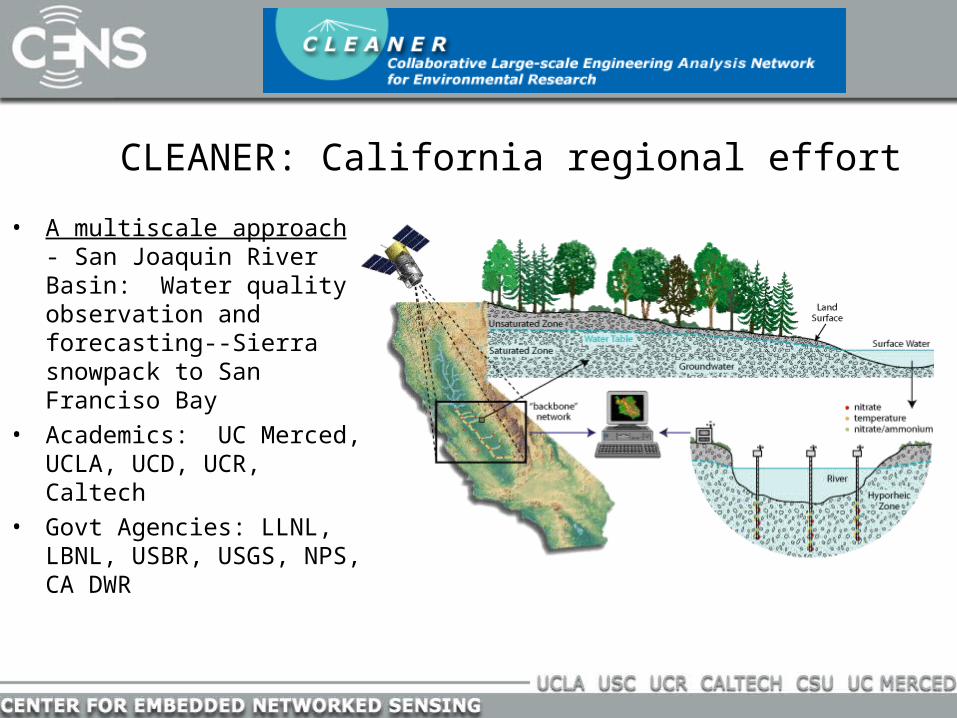
CLEANER: California regional effort
• A multiscale approach - San Joaquin River Basin: Water quality observation and forecasting--Sierra snowpack to San Franciso Bay
• Academics: UC Merced, UCLA, UCD, UCR, Caltech
• Govt Agencies: LLNL, LBNL, USBR, USGS, NPS, CA DWR
Key Accomplishments
• Multi-disciplinary research objectives– Cross-disciplinary teams deploying real
systems--Impossible without STC infrastructure
– Investigation of fundamental questions across our domains
– New areas of investigation:• Statistics, Data fusion (Hansen)• Programming languages (Kohler)• ELSI-ipercs effort (Cuff)
• Internal Organization:– Diversity and Education area growth– UC Merced partnership (Harmon)– NIMS Project
• Education– Very successful undergraduate
summer research program– 7-12 inquiry pilot testing– Gender-Diversity program
• Community/External visibility
– Co-Founded and hosted ACM Sensys 2004
– Co-Founded ACM Transactions on Sensor Networks
– Hosting IPSN 2005
– Soils workshop, JR Spring 2004
– Active in NEON, CLEANER planning
– Advisory to NSF CISE, ENG, ERE, and NRC panels
– Pottie-Kaiser, Cambridge Univ Press, Spring 2005
• Technology development– Emstar continued maturity– Stargate platform support– Nitrate Sensor, LC development– NIMS Lab system
• Testbed deployment– NIMS prototype:Wind River and JR– Factor building data capture– JR CMS, Phenology, ESS– Contaminant deployment--Palmdale– Marine lab facility– Marine field experiments-3-mike
Principles of Embedded Networked Systems Design
Gregory J. Pottie and William J. Kaiser
Electrical Engineering Department
University of California, Los Angeles
QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture. QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressorare needed to see this picture.
Cambridge University PressSpring, 2005
Preprints in use at Yale, UMass Amherst, UCLAEE, UCLA CS
Broad Relevance to Global Issues
Security
Global Climate Change
Precision Agriculture
Theatre, Film, Television
Coral Reef
Global Seismic Grids/Facilities
High IntegritySystems
AdaptiveSampling
NIMS ToolsEmbedded Imaging
Programming
PublicHealth
WaterQuality
Early Warning, Crisis Response
Strong Institutional Support
New CENS Building – Spring 2005
• Generous Matching funds from VCR and HS-SEAS
• Active encouragement and support of multi-disciplinary, campus-wide activities
• HS-SEAS loan for building shell (6000 square feet)
• Currently seeking donor for shell and furnishings
• Excellent naming opportunity
Roadmap for the day
• 9:30-10:15 Keynote: Dr. Vinton Cerf, MCI
• 10:15-10:30 Break
• 10:30-11:30 Robotics and Actuation@CENS (Caron, Sukhatme)
– Networked Info-Mechanical Systems (Kaiser)
– Adaptive Sampling (Hansen)– Marine Robotics (Caron, Sukhatme)– Actuation and Communication
(Browne)
• 11:30-12:00 Embedded sensing in the public sphere (Burke, Cuff)
– Theater Film Television authoring systems and application testbed plans (Burke)
– Public Sphere/Ethics (Cuff)
• 12:00-1:30 Lunch and Poster/Demo Sessions
• 1:30-3:00 Toolkits@CENS (Guy, Kohler)– Wide area, high datarate, wireless (Davis)– Emstar development tools (Girod)– Sensors for environmental monitoring
(Harmon)– GUI and Data management for ecosystem
monitoring (Wimbrow)– Mote clusters, Extensible Sensing System for
ecosystem monitoring (Stathopoulos)– Programming tools (Kohler)
• 3:00-4:00 Multi-scale Integration (Hamilton, Kaiser)– Multi-scale Sampling (Pottie)– Scaling Challenges in Ecology (Rundel)– Microclimate and Ecophysiology (Graham)– Microbial and Root Ecology (Allen)– NIMS and Multi-scale Experiments (Kaiser)
• 4:00-5:00 Data Integrity (Harmon, Srivastava)– Error resilient sensor technology (Harmon)– In situ calibration (Potkonjak)– Integrity (Srivastava)
Keynote Speaker: Vinton Cerf
• Sr. VP of Technology and Strategy, MCI
– Previously Senior VP of Architecture and Technology
• One of the fathers of the Internet (suggesting perhaps we need a better metaphor…)
– Co-designer of TCP/IP, Internet architecture (DARPA 1976-82)
• Numerous awards
– 1997 co-recipient of US National Medal of Technology
– NAE Marconi, Draper awards; IEEE Bell, Kobayashi, Sigcomm, …
• MS, PhD, UCLA Computer Science Department.