decision support system of simultaneous localization and maping using olap - master thesis
TRANSCRIPT

SISTEM PENDUKUNG KEPUTUSAN
PENENTUAN LOKASI DAN
PEMETAAN SECARA SIMULTAN
DENGAN OLAP
Harindra Wisnu Pradhana (J4F009021)
Magister Sistem Informasi Universitas Diponegoro
DECISION SUPPORT SYSTEM OF
SIMULTANEOUS LOCALIZATION
AND MAPPING USING OLAP
Harindra Wisnu Pradhana (J4F009021)
Magister Sistem Informasi Universitas Diponegoro

SLAM?
Estimasi Lokasi & Pemetaan secara Simultan
• Explorasi area
• Deteksi & identifikasi obyek
• Obyek lama :
• Estimasi lokasi robot
• Kalibrasi peta
• Obyek baru :
• Pengkinian peta

Riset Sebelumnya
Estimasi lokasi (Durrant-Whyte & Bailey, 2006)
Representasi data robotik dalam vektor (Pradhana, 2013)
Partisi peta SLAM kedalam peta lokal (Chong & Kleeman, 1999)
Pengolahan data SLAM (Pratama, 2013)
Pengolahan dengan DW disajikan dalam OLAP (Hammergren & Simon, 2009)
Sensor Robotik (Ruckert, 2009)
Karakteristik sonar (Saleem, 2013)
Motor Robotik (Pal & Tripathy, 2011)
Motor Stepper (Singh dkk, 2010)
Sistem koordinat (Strang, 1991)
Operasi vektor (Peacock, 2009)

Tujuan & Manfaat
Tujuan : Menerapkan sistem OLAP untuk mengolah data SLAM yang mampu :
Menampilkan peta
Mengetahui posisi terkini agen relatif terhadap peta
Menginformasikan area-area potensial yang belumdipetakan
Manfaat :
Menunjang sistem kerja elektromekanik
Observasi non destruktif
Interpretasi visi robotik
Visualisasi kondisi & posisi robotik
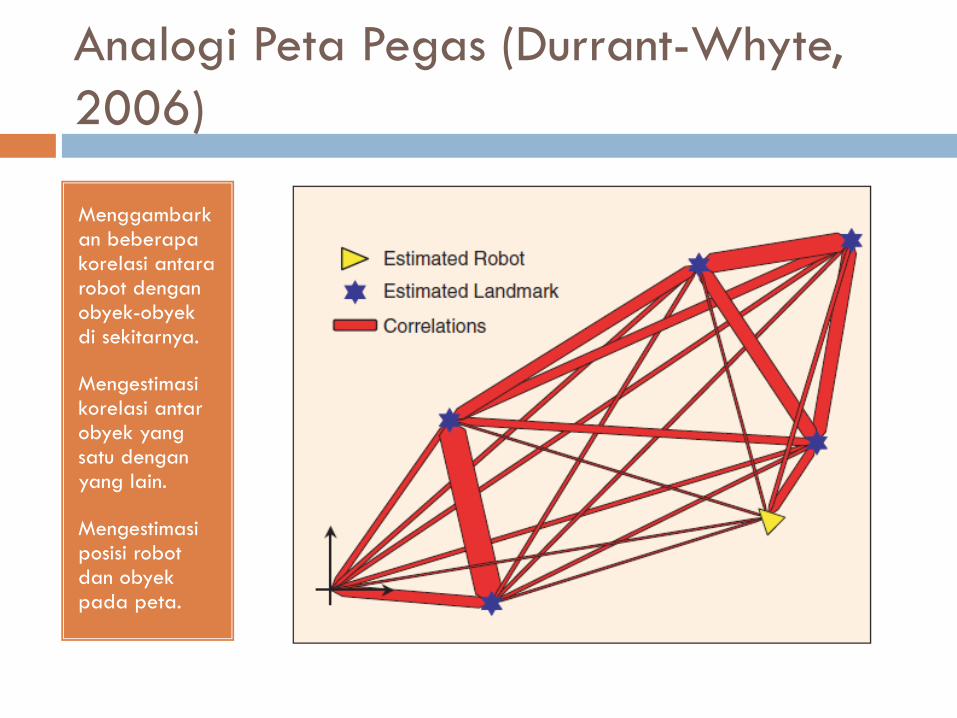
Analogi Peta Pegas (Durrant-Whyte,
2006)
Menggambarkan beberapakorelasi antararobot denganobyek-obyekdi sekitarnya.
Mengestimasikorelasi antarobyek yang satu denganyang lain.
Mengestimasiposisi robot dan obyekpada peta.

Metode SubMap (Chong & Kleeman,
1999)
Peta Global, obyek-obyekhasil deteksisebelumnya
Peta Lokal, obyek-obyek hasildeteksi baru
Konsolidasiinformasi, pengkinianpeta global denganinformasi-informasi daripeta lokal.

Asumsi
Posisi dan jarak antar obyek random (tidak teratur)
Bentuk dan ukuran obyek sama (silinder)
Robot tidak memiliki sistem navigasi
Tanpa kompas, tidak tahu menghadap ke arah mana
GPS, tidak tahu sedang di koordinat berapa
Drop point robot random
Sensor & Aktuator robot ideal

Tantangan
Estimasi lokasi robot
terhadap peta
Konsolidasi peta lokal
pada robot terhadap
peta global
Kolom, Baris Peta
Data Numerik Data
Geografis
Mempertahankan
informasi
SLAMTantangan Spatial OLAP (Bimonte, 2007)

Usulan Solusi : Peta Pegas OLAP
Robot
(LR,αR, βR)Robot Obj 1
(LR1, αR1)Robot Obj 2
(LR2, αR2)
~
Robot Obj n
(LRn, αRn)
Robot Obj 2
(LR2, αR2)Obj 1
(L1,α1)Obj 1 Obj 2
(L12, α12)Obj 1 Obj n
(L1n, α1n)
Robot Obj 2
(LR2, αR2)Obj1 Obj 2
(L12, α12)Obj 2
(L2,α2)Obj 2 Obj n
(L2n, α2n)
~
Robot Obj n
(LRn, αRn)Obj 1 Obj n
(L1n, α1n)Obj 2 Obj n
(L2n, α2n)Obj n
(Ln,αn)

Langkah Penelitian
Kalibrasi
Rancang bangun Data Warehouse
Rancang bangun OLAP
Rancang bangun antarmuka
Pengujian Sistem

Kalibrasi
Koefisien gerakan
maju =
19,92295step/mm
Koefisien gerakan
memutar =
20,67701step/0
Sudut=0.96492(det)-
2.02342
Jarak=[0.16843(det)
+2879549]x1mm/µs
Gerakan Deteksi

Functional Modeling
Input Buffer
Filter
Recap
Olap Class
SVG
Class

Input Buffer & Filter
readFileLine membaca 1 baris data log file robot
checkFileLine melakukan pemeriksaanformat baris data
AddDbLine menyimpan baris data ke dalam tabel input buffer
readBuffer membacasatu row data padatabel input buffer
addMov konversi & penyimpanan data gerakan
addDet konversi & penyimpanan data deteksi
Input Buffer Filter

Recap
slamVectorAdd operasi penjumlahan vektor, pemakaian pada :
Rekapitulasi gerakan terhadap posisi agen sebelumnya
Rekapitulasi deteksi terhadap posisi agen terakhir
slamAtan fungsi arctan yang dimodifikasi untukmenghasilkan kuadran yang tepat dengan menganalisakomponen vertikal & horisontal
addMov menyimpan posisi terakhir robot relatifterhadap peta
addDet menyimpan posisi deteksi relatif terhadappeta

Olap Class
objTollerance toleransijarak simpangan terjauhbeberapa deteksi dianggapsebagai satu obyek
matchObject analisabeberapa posisi deteksi yang dianggap sebagai satu obyekyang sama
slamVectorSub operasipengurangan vektor untukmengetahui relasi antar 2 titikpada peta
mapCompare
membandingkan seluruh
obyek antara 2 peta
objCompare
membandingkan seluruh
relasi dua obyek pada
dua peta berbeda
Local Map Global Map
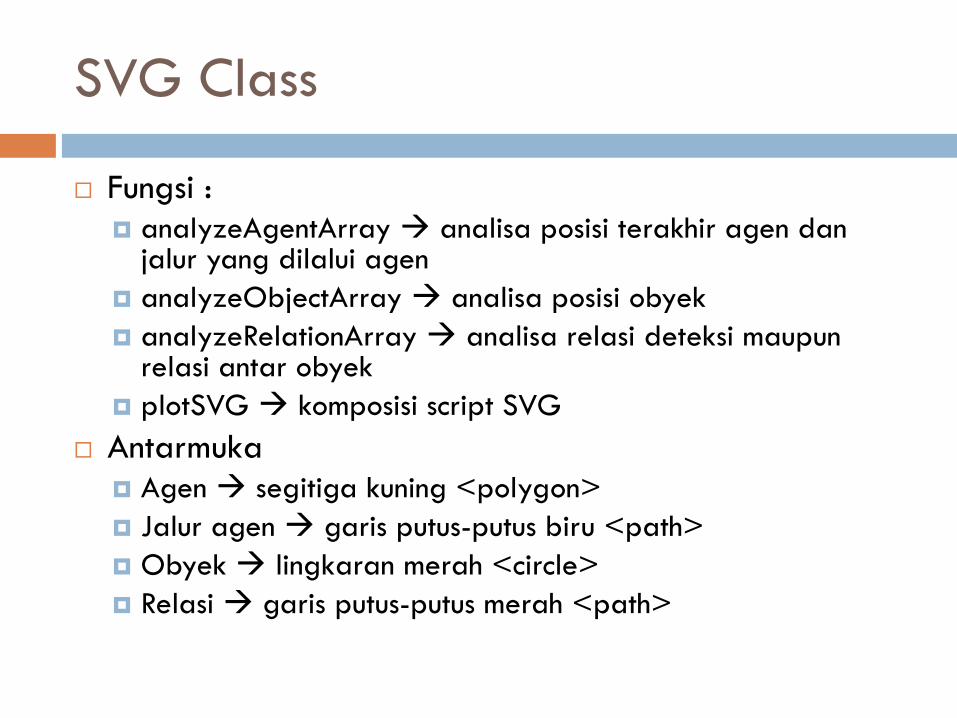
SVG Class
Fungsi :
analyzeAgentArray analisa posisi terakhir agen danjalur yang dilalui agen
analyzeObjectArray analisa posisi obyek
analyzeRelationArray analisa relasi deteksi maupunrelasi antar obyek
plotSVG komposisi script SVG
Antarmuka
Agen segitiga kuning <polygon>
Jalur agen garis putus-putus biru <path>
Obyek lingkaran merah <circle>
Relasi garis putus-putus merah <path>

Realisasi Jadwal Penelitian
No Kegiatan \ Bulan Ag Sep Okt Nov
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
1 Kalibrasi V V
2 Rancang bangun Data Warehouse V V
3 Rancang bangun OLAP V V V
4 Rancang bangun Antarmuka V V V
5 Pengujian Sistem V V V
6 Penyusunan Laporan V V V VV

Terima Kasih