defense technical information center compilation part … · compilation part notice adp014206...
TRANSCRIPT
UNCLASSIFIED
Defense Technical Information CenterCompilation Part Notice
ADP014206TITLE: A Comparative Study of NN and SVM-Based ElectromagneticInverse Scattering Approaches to On-Line Detection of Buried Objects
DISTRIBUTION: Approved for public release, distribution unlimited
This paper is part of the following report:
TITLE: Applied Computational Electromagnetics Society Journal. Volume18, Number 2. Special Issue on Neural Network Applications inElectromagnetics.
To order the complete compilation report, use: ADA417719
The component part is provided here to allow users access to individually authored sections)f proceedings, annals, symposia, etc. However, the component should be considered within[he context of the overall compilation report and not as a stand-alone technical report.
The following component part numbers comprise the compilation report:ADPO 14206 thru ADP014212
UNCLASSIFIED
ACES JOURNAL, VOL. 18, NO. 2, JULY 2003, SI: NEURAL NETWORK APPLICATIONS IN ELECTROMAGNETICS 65
A Comparative Study of NN and SVM-BasedElectromagnetic Inverse Scattering Approaches to
On-Line Detection of Buried ObjectsSalvatore Caorsil, Davide Anguita2 , Emanuela Bermani 3 , Andrea Boni3,
Massimo Donelli3 and Andrea Massa3
Dept. of Electronics, University of Pavia, Via Ferrata 1, 1-27100 Pavia,Italy2 Dept. of Biophysical and Electronic Eng., University of Genoa, Via Opera Pia 1 A, 1-16145, Genova,ltaly
SDept. of Information and Communication Tech.,University of Trento, Via Sommarive 14, 1-38050 Trento,Italy
these techniques impracticable (particularly when se-Abstract-Microwave-based sensing techniques consti- rial implementations are realized) if real-time perfor-
tute an important tool for the detection of buried targets. mances are required.In this framework, a key issue is represented by real-time scatterer localization. As far as such a topic is
concerned, this paper presents a comparative evaluation point is the reduction in the number of unknowns. To-of the performances provided by a conventional NN- ward this end, a-priori information (if available) on thebased inverse scattering technique and by a new SVM- scenario under test can be very useful. This concept hasbased electromagnetic approach. In order to estimate been successfully exploited in inverse methodologiesthe effectiveness values of the two methods, realistic based on artificial neural networks (NNs) (see [11]configurations and noisy environments are consideredand current capabilities, as well as potential limitations, (pp. 475-479) and references cited therein). As farare pointed out. Finally, possible future research work is as detection problems are concerned, methods basedoutlined. on both multilayered-perceptron [12], [13] and radial-
basis-function [14] neural networks have demonstratedtheir capabilities for on-line retrieving of buried cylin-
I. INTRODUCTION drical scatterers.Though NN-based approaches have generally of-
The detection of buried objects by means of interro- fered good performances in solving inverse-scatteringgating electromagnetic waves is usually a very difficult problems, they still suffer from several drawbacks nottask. The addressed problem is nonlinear, due to the completely solved up to now. From the inductive-relation between unknown quantities (object parame- theory point of view, the main drawback is the difficultters and field distribution) and problem data, it is ill- control of the complexity of underlying NN models.posed and, generally, only aspect-limited measures are By the term complexity it is usually meant the capacityavailable. of a learning machine to fit the input data. Briefly, if
In the past few years, considerable efforts have been a machine is too complex, it will typically overfit thedevoted to dealing with detection or, more generally, data, thus losing the property of generalization for newreconstruction problems, and several approaches have measures not included in the training set. If complexitybeen proposed. As far as weak scatterers are con- is too low, the machine will fail to correctly interpretcerned, linearized procedures have been applied (see the underlying relations among training samples. The[1], [2], [3] and references cited therein). The use of complexity of a learning machine depends on manyclosed forms of the scattering equations (based on the factors. In the case of NNs, the numbers of hiddendiffraction theorem) and of the Fast Fourier Transform layers and neurons, the number of interconnections,(FFT) has made it possible to obtain faster process- and the learning algorithm used for the training processing rates and real-time imaging. Moreover, numerical [15] are the predominant parameters. Unfortunately,procedures based on higher-order Born approximations NNs lack an effective theory suggesting the mosthave demonstrated their effectiveness [4], [5]. suitable NN topologies and/or calibration parameters.
On the contrary, nonlinear algorithms must be used An NN adapts its internal parameters (i.e., the weights)when strong scatterers are considered. The retrieval automatically in order to best approximate the availableproblem is usually recast into an optimization one and training data, but the topology, the transfer functionis effectively solved with minimization techniques [6]- and the other parameters are heuristically selected. At[10]. Unfortunately, large computational resources and present, there is no good way to determine how manya high computational load are needed, thus making hidden layers or how many hidden nodes each layer
1054-4887 © 2003 ACES

66 ACES JOURNAL, VOL. 18, NO. 2, JULY 2003, SI: NEURAL NETWORK APPLICATIONS IN ELECTROMAGNETICS
should contain, given the sample data with which to . y
train the NN for the solution of a given problem. Fromthe computational and optimization points of view,NNs exhibit drawbacks as well. The learning processof an NN consists in solving a nonlinear optimizationprocess. Therefore, any conventional optimization al-gorithm, including the widely used back-propagation 6/ ,procedure, leads to reach a solution that corresponds toone of the local minima of the target cost function. An 0
empirical way to face such a problem is to train severalNNs with different starting points, thus overloading theoptimization process. However, this choice might result D,in inability to unambiguously evaluate statistical andsystematic errors on neural computations.
A possibility to overcome these drawbacks is based Fig. 1. Geometry of the problemon new results in Statistical Learning Theory (SLT)[16] which lead to new algorithmic paradigms andnew computational architectures that, though still based object are homogeneous, TB, and the dielectric profile
on the NN model, entirely relinquish their biological of the geometry under test (Fig. 1) can be described
plausibility to achieve a firm theoretical background. as follows:
SLT allows one to derive statistical and algorithmicproperties that can limit or avoid altogether the NN To if y > Losproblems previously described. One of the main con- 0 < x < XB + PBCosOtributions in this field has been provided by Vladimir r (x, y) = rB if 0 < y < YB + PBsinOVapnik [16], who has formulated and formalized the 1 0 <_0 < 27r
inductive rules that regulate the learning process by Ts otherwiseexample principles. On the basis of these fundamen- (1)tals, a new learning paradigm, called Support Vector This scenario is illuminated by multiple transmittersMachine (SVM), has been developed. After initial lying on Do and located, in the upper half space,
studies, SVMs are now successfully applied in several at the positions {(xt, Yt); t = 1, ... , T}. The probingfields ranging from pattern recognition to function fields, Eirr (x, y), are radiated in the free space and at
approximation tasks. From a theoretical point of view, a fixed frequency by a known distribution of current
SVMs turn out to be very appealing, as compared with filaments parallel to the z-axis. The same probes work
conventional NNs, for the following two basic reasons: as receivers for the anomalous field.
"* the constrained-quadratic structure of the opti- Under these hypotheses, the addressed inverse scat-
mization problem solved for the learning process; tering problem can be mathematically stated as fol-
"* the solid statistical theory on which SVMs are lows. Starting from the knowledge of the anoma-
based. lous field, Et"t, collected at the receiver positions
In this paper, the detection of buried objects by means {(Xr, Yr); r = 1, ..., R}
of interrogating electromagnetic waves is addressed Et0t(XrYrIXtVt) = Efl(XrYrIXtyt)+by using an inductive approach. Within the frame- Et(x, ylxt,yt)=E(xryr;Xy)(work of electromagnetic retrieval, the effectiveness and +kfDs Es(x,(2xt,yt)Gs(xr,Yr;xy)T (xy) dxdylimitations of the SVM-based strategy are evaluated (2)and a comparative study versus conventional NN-based ine the scaretermethods is made. Finally, selected numerical results {(xB,yB),PB,sBt} defining the scatterer underon realistic configurations and noisy environments are . In Y, I2):reported and discussed. * EtflC(xr'YTIxt'yt) = Eirr(xr'yrIxt'yt) +
Eref(Xr,YIXt,Yt) is the electric field at thereceivers in the absence of the object;
II. MATHEMATICAL FORMULATION . Eref(Xr,y,[Xt,yt) is the electric field reflectedLet us consider the problem of determining the by the planar interface at the receivers;
unknown parameters of an object buried in a homo- . Es (x, ylxt,yt) is the electric field induced insidegeneous soil. With reference to a two-dimensional ge- the reconstruction domain Ds when it containsometry, let Ds be a lossy region with complex contrast, the object;rs = [es - 1]-j's, enclosing a circular cylindrical . Gs(xr,yr;X,Y) is the Sommerfeld-Green func-scatterer of radius PB. The dielectric properties of the tion for the half-space geometry [6].

CAORSI, et al.: ELECTROMAGNETIC INVERSE SCATTERING FOR DETECTION OF BURIED OBJECTS 67
Then the solution of the addressed inverse scattering rtrainig = {(vL,,e); n = 1,..., N}, and accordingproblem requires the determination of the nonlinear to a backpropagation algorithm, weights and biasesfunction, 4), defined as follows are computed by minimizing the error function V
_ = D {E (3) N
where X is the "scatterer array" (X = [Xp; = 1, ... , P] V nb E 1..}= .e - L)
= (XB, YB), PB,rB], P being the number (5)of unknown parameters) and Etot is the data by a gradient descent procedure.array defined as E1 = [Et~t(Xr,Yr1Xt,Yt); Therefore, the direct solution of the inverse-r = 1, ... , R; t = 1, ... , T]. This is a regression scattering problem is avoided, and real-time (after theproblem in which the unknown function (4)) training phase) solutions to buried-object localizationmust be approximated by the knowledge of a are obtained [13]. However, as the error functionnumber of known input-output pairs of vectors (5) is non-convex, one of the main drawbacks of
{• (x) '(Etot) }n = 1,..., N. the approach is the presence of local minima where-n the optimization algorithm might be trapped and the
III. LEARN ING-BY-EXAMPLES STRATEGIES FOR solution of which would have no physical significance.
INVERSE SCATTERING PROBLEMS
The inverse-scattering problem described in Section B. SVM-Based ApproachII can be addressed in several ways. From a math- In order to avoid the drawbacks of the NN-basedematical point of view, the key issue is to find an inverse scattering method related to the nonlinear fit-approximation, 4, for the unknown function 41 on the ting of the training samples, an SVM-based approach isbasis of a set of samples {(fn,en); n = 1,...,N}, _En presented. The underlying idea of the SVM procedureand en being an input pattern (i.e., a data array v__n is to split the approximation for the nonlinear functionEtnt) and the corresponding target (i.e., a scatterer 4b into two steps. Instead of performing a nonlineararray En (=x) n ), respectively. This is a typical fitting in the input space, a nonlinear mapping of thelearning-by-examples problem, which is usually faced training samples from the input space into a largerin the presence of unknown systems with measurable (possibly infinite) space (i.e, the feature space, RT)input/output signals. In the following, two approaches is first performed. Then, a simple linear fitting isbased on a multilayer perceptron (MLP) neural net- carried out in the new space, thus avoiding typicalwork and on an SVM, respectively, will be presented. nonlinear-fitting drawbacks and keeping the advantages
of a linear approach. Moreover, by exploiting someA. MLP-NN Approach mathematical properties of nonlinear mappings, the
Neural networks are distributed computational sys- evaluation of the data in the feature space is nottems characterized by a multi-layered structure of required, as the SVM does not have to explicitly workneurons fully interconnected by weighted links. MLP- in this space.NNs can be considered as universal approximators for In more detail, each data array 1_,, is mapped intoany function 4) : R×T _ RP [17]. Therefore, they the feature space through a nonlinear transformationare suitable for facing with regression problems char- W : •RxT _+ T with T > R x T. Then, theacterized by complex nonlinear relations between data samples in the feature space are linearly interpolatedand unknowns, such as inverse scattering or buried- by defining a hyperplane with a normal vector w. Thus,object detection problems. In this context, 3ZR×T is the approximating function is given bythe space of arrays representing measurement data, andRP is the space of unknown parameters describing a ' (_v) = w__- S_ (i) + b (6)
buried object. Among all possible hyperplanes, SVMs find the oneMLP-NN theory [11] suggests approximating 4D by that corresponds to a function 4 having at most a
a nonlinear function of the weighted measurement data deviation • from each target e$) (*), for all theS(v) = t' {L_ w (L-1, L) + b (4) measures _v, and that, at the same time, is as "flat"
as possible. As it is impossible for all the points to
where L is the number of layers; • = lie inside the e band, some errors (n, n, also called
i. - + b~b I = 1, ... ,L being v = q , slack variables) are allowed and linearly weighted.
is t e nonlinear activation function (e.g., a sigmoid); Mathematically, this description leads to a constrainedw(t-1, !) and are the weight matrix and the bias (*) As up to now it has been possible to synthesize only single-array of the /-th layer, respectively. Given known output SVM, we refer to the estimation of a single scatterer arrayinput-output pairs of vectors (called training set), component e,(P) = (xp)n; p = 1, P .

68 ACES JOURNAL, VOL. 18, NO. 2, JULY 2003, SI: NEURAL NETWORK APPLICATIONS IN ELECTROMAGNETICS
quadratic optimization problem (CQP) where the reg- implicitly with nonlinear mappings through the use ofularized cost function -y Kernel functions
Nk (mi, j) = w (vLi) • p (_j) (13)
y {Iw_,b} = 2 -�IIl + C•• (7 + (7) The theory of kernels, that is, the conditions undern=1 which equation (13) holds, has been known since the
is minimized over w and b, subject to the following beginning of the last century; it is based on Mer-constraints: cer's theorem [16] and has been applied to pattern
recognition tasks since the '60s [20]. However, only(p) recently has the connection with learning machines
en -w_'P (_i)- b- < C ± n been well formalized [18]. Kernel functions are pos-.• ( _) + n- < • + n Vn (8) itive semidefinite functionals. Therefore, using this
& n, >_ >0 property and the fact that the constraints of the aboveoptimization problem are "affine", any local minimumThe unciony i comose oftwoterm. Te frstis also a global one, and algorithms exist by which
forces the hyperplane to be as flat as possible, and isaoaglblneadagrthsxstywicforcs te he~lne t beas latas pssileand the solution can be found in a finite number of stepsthe second penalizes the deviation of each target from the rmon ia b e found in strite postethe function D. The constant C measures the tradeoff [21]. Furthermore, if the kernel is strictly positive
bw t t to trad definite (that is always the case, except in pathologicalbetween the two terms. It can be shown that this stain) h ouini louiu.Teepoete
approach can be used to control the complexity of situations), the solution is also unique. These propertiesr Risk overcome many typical drawbacks of classical neural-the learning machine, according to the Structural newrRprocesciashkeemiaino
Minimization principle [16]. This principle guarantees suitable minimum, the choice of the starting point, the
a considerable generalization ability of the model, and optal sing criteriatan so on.
provides upper bounds to such ability, albeit in a Since the publication of early seminal works on ker-
statistical framework. It is also interesting to note that nel functions, many functionals have been found that
this formulation, which derives from SLT, resembles satisfy Mercer's theorem. As far as inverse-scattering
closely the regularization approach that is usually problems are concerned, a Gaussian kernel
exploited when dealing with ill-posed problems, like
inverse ones [18]. t [giThe problem defined by eqs. (7)-(8) is then rewritten k (_i, Lj) = exp 2,- (14)
in dual form by using the Lagrange multiplier theory. I L I IBy introducing 2N Lagrange multipliers, an, an, n = performing a mapping in an infinite-dimensional fea-1,.... N, a dual functional, 7d, to be maximized is ture space [18] and preliminarily used in [19], hasobtained (see [19] or [16] for more mathematical demonstrated its effectiveness.details): Concerning the SVM parameters, the threshold b
-fd{la, a*} =is computed by means of the Karush-Khun-Tucker_.I{EN =1 conditions of the CQP at optimality [19], and the2 , jZ l (a, - ao) (aj - aý) W (vi) 'P (Li) + hyper-parameters of the problem (a, q, C and e) are
-E 1~~ (a. + a,*') + EN , e$ (an - a*) deduced by accomplishing the model-selection taskn= n=1 n (9) proposed in [22].
subject to Finally, the CQP is solved by a standard optimiza-tion algorithm, namely, Platt's SMO algorithm for
N regression [23].
E (an -an) = 0 an,a E [0, C] (10)n=1 IV. NUMERICAL RESULTS
asN In this work, a comparative study of NN and SVM-
w = 1 (an - an) 'P (kn) (11) based approaches is made concerning the localizationn=1 of a scatterer buried in the soil. Let us consider a
Consequently, 4 is equal to square investigation domain Ls = A-sided (A beingthe free-space wavelength) completely embedded in
N the ground. The relative permittivity of the soil isS(v_) = Z (an -an) 'P (v)" 'P (k_) + b (12) es = 20.0 and the conductivity is as = 0.01 -. The
n=1 center of the region under test is Lo = AA deep. The
where only the inner product of the nonlinear mapping buried object is a lossless circular cylinder of radiusfunction (and not the function itself) appears. This is PB = 2A and the relative permittivity of the groundthe well-known kernel trick that allows one to deal is equal to EB = 5.0. This scenario is illuminated by
CAORSI, et al.: ELECTROMAGNETIC INVERSE SCATTERING FOR DETECTION OF BURIED OBJECTS 69
SNR = l0loglo Er=l Et. 1 IEtOt(xrIxtY01
• ":'•::: :• " "•:•: <':" '•(15)
K i. . being the variance ofnoise, affected the mea-. .. sured signals.
A two-layer MLP-NN [12], characterized by 32inputs, 32 hidden neurons, and 2 output neurons, wastrained by using a delta-bar-delta back algorithm [25]in order to overcome the shortcomings of the gradient-descent procedure and to increase the convergence rateof the standard back-propagation learning algorithm.
Fig. 2. Training set. Geometrical arrangement of the center of the Concerning the SVM-based approach, two SVMscylinder under test were used to estimate the center coordinates of the
buried object. Moreover, after the optimal selectionprocedure, the values of the SVM hyperparametersturned out to be constant quantities equal to (C)ZB =
(C)s = 100 and e = 0.001. On the contrary,the variance values of the Gaussian kernels, (a 2 )and (a 2) , were determined independently of each
scenario under test.
A. Definitions
In order to quantitatively estimate the effectivenessof the presented approaches, some error values are
defined. Let us introduce the
* local errors on the center location, 6' and J':
oo, -•.u 1, .. ,U;Fig. 3. Test set. Geometrical arrangement of the center of the X d_. V () 1, UV ()
cylinder under test- ..... I V 1,.V;
S u (v)= 1,..., U (v)(16)
an electric line source, located in the upper region with o local average errors on the object localiza-
the coordinates xt = 0 and yt = !A, t = T = 1, and tion, ( = I(,u=1, U} and3 cvv, 1, ..., V :parallel to the air-soil interface. The anomalous field 1V
is collected at R = 16 measurement points equally --. t uE ()spaced (d = 1) and located on a line placed close to = -- u =1, ... ,Uthe air-soil interface (LsT X)
LT 2). = . 1, M U(')=1Yu('The data used to generate the training set and (17)
those used to test the SVM approach, as well as * global average errors, OE, and EO:the MLP neural network, were obtained syntheticallyby a Finite Element code and a PML technique E 1 r . (=• 2
[24]. During the learning phase, the training set, _t [X -- (u=u)
{Ptraining, ; N = 729}, was obtained by moving the m Wv -(0center of the cylinder inside Ds among the positions Ev= _V"__- u(_)=__ __
shown in Figure 2 and collecting the anomalous field "". V 1 - U(V 2
at the receiver positions. As far as the test phase is (18)
concerned, M = 84 randomly chosen locations of the where the subscripts rec and act refer to the estimatedscatterer (Fig. 3) were considered in order to define and actual coordinates of the scatterer, respectively;the test set rtet = {(Lnm, t..); m = 1,...,M}. An dmax = LS is the maximum error in defining theadditive Gaussian noise, characterized by the signal- coordinates of the center of the circular scatterer whento-noise ratio (SNR) it is contained in the investigation domain, Ds.
70 ACES JOURNAL, VOL. 18, NO. 2, JULY 2003, SI: NEURAL NETWORK APPLICATIONS IN ELECTROMAGNETICS
MLP-NN (Noiseless) MLP-NN (Noiseless)
0.S Data points .. 5 Data points .Beat line fit Beat line fit-
0.25 0.25 .
-I-
0~
-0.25
-0.5 -0.5 L
0.5 Data Pointa Data pointy
Belt 1ine fit -Bat line -i t .
0.2 5 0.25
-0.25 -0 .25
-0.5 -0.25 0 0.25 0.5 -'0.5 -. S 0 0.25 0.5x ,O /) y ,/X0
(c) (d)
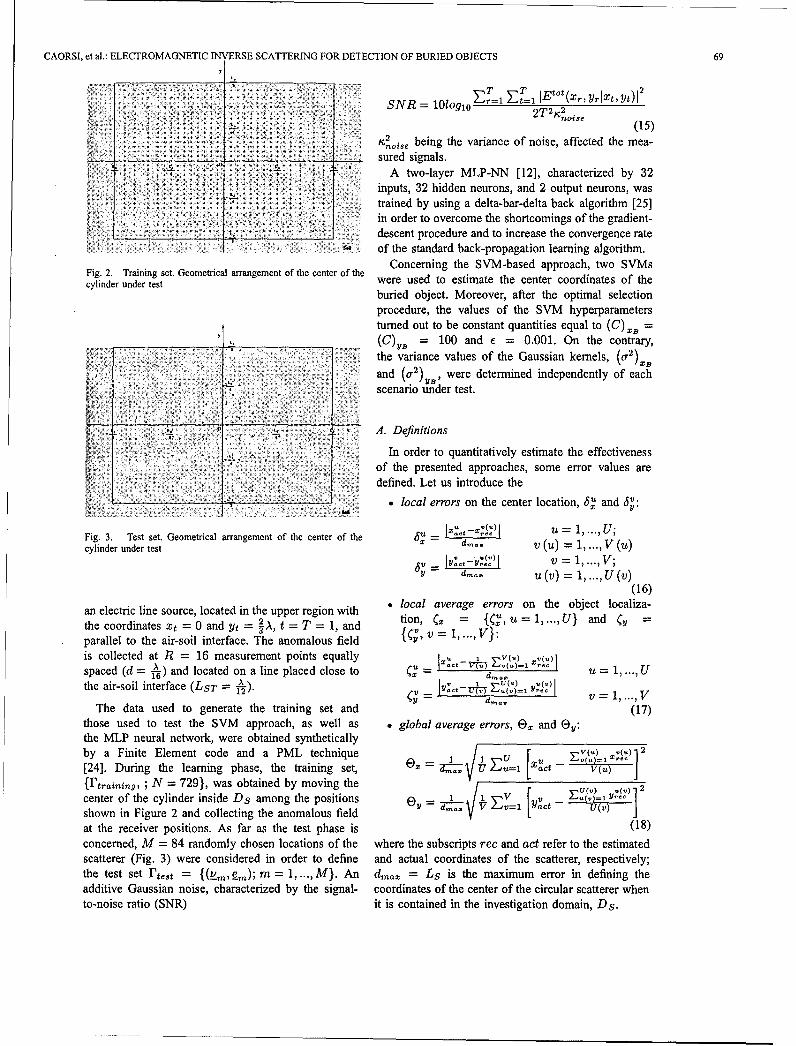
Fig. 4. Reconstructed data versus actual data (Noiseless Case). (a)-(b) MLP-NN approach, (c)(d) SYMbased approach. (a)-(c) N eand
(b)-(d)
B. Numerical Assessment -Scenario I sharply reduces the error of the MLP-NN, reaching
0a5 avrg0 rrreulto<6 s =008
The first example is aimed at evaluating the pos- o
sibility of locating the buried object starting from (< 6. >MLP= 0.1004 being the average error made
the knowledge of the measured electric field and by the MLP-NN approach). Moreover, it should beassuming the knowledge of the soil characteristics noted that the time required for the SVM training isto be a-priori information about the geometry un- about one tenth of the one required by the MLP-NN,der test, Consequently, the incident field is a known whereas there is no significant difference between thequantity and the data array is defined as follows: computation times taken by the two approaches for theE scatt [Etot(xr,,yrIxt, yt) -EýIn(x,,, YIxt, yt); object localization (i.e, after the learning phase).r = 1,.,R; t = 1,...,T]. In this context, the SVM TABLE I
parameters have been chosen equal to (Or2) -B 0.64 SCENARIO I (Noiseless Case). LOCAL ERROR STATISTICSand (or2
) 0= 0.32.
Fi gure 4shows the localization results for the ex- I I < 4 > 1 -axfb6u} I s{}amples making up the test set and obtained by using MLP 10.0347 10.2098 7.14.10-
SV 0.0177 0.143 7.30-10the MLP-NN (Fig. 4(a)-(b)) and the SVM-based proce-dure (Fig. 4(c)-(d)), respectively. As can be observed,
M .14 0.561 5.31..0.good accuracy concerning the center location is ISVM 0.0584 0.3487 7.4410-
achieved along the two reference axes and for both theMLP-NN and SVM-based approaches. In particular,
even if the detection accuracy decreases as the distance In order to assess the robustness of the learning-from the air-soil interface increases, good localizations based retrieval strategies, a noisy environment hasare achieved in the whole domain, as confirmed by been taken into account. For all the simulations, thethe statistics shown in Table I. In particular, as far as buried cylinder and the electromagnetic scenario arethe scatterer depth estimation is concerned, the SVM unchanged and characterized by the same dielectric

CAORSI, et al.: ELECTROMAGNETIC INVERSE SCATTERING FOR DETECTION OF BURIED OBJECTS 71
s00 - s do S - i. -1 d3
0.3 0.3S0'00 .........
.0.5 0. -0.0 0. 03" 3 • 0 0 .0 0.
0.i 0.i
o..2 0,• . 2 ,,.Y-1 / 7
o.1 0.1
0.0s 0.0s
-0.s - 3 -0.1 0.1 03 -0.5 -0.3 -0.1 0.1 0.3
(a) (b)
: () ,( 20de S 35 dB
0.ý " 0.3 "•
0.25 .. .25 "
0.2 0.2• • Y-t /X.
p r a s d t r psTe 0.as avs
MoPN oan th V-ae rcdrsaeson u o terfetosofteargouditraei
0 oLAe.x -0c3 -d.1 t.1 0.3 -e.s -o.f -the str d so
(c) (d)
0.3S- 0.3 V - ]
""ttemr dfiutta th horizontl detction
0.2p • t.his
0.2 0.2 , / o
0.s5 0o-.
o.- . ...... 0.: s .... ..... . ..... ... .
(e) (
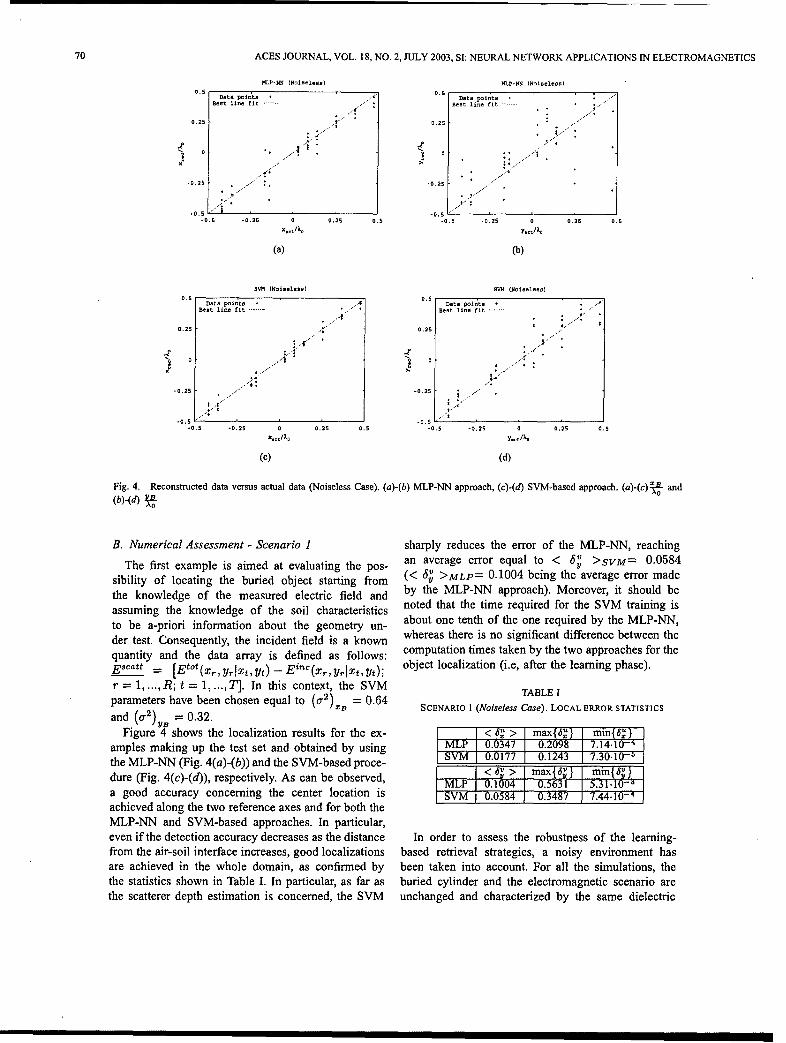
Fig. S. Scenario I (Standard Validation). Local average errors of the MLP-NN and SVM-based procedures for different signal-to-noiseratios: (a) SNR = 5 dB, (b) SNR = 10 dB, (c) SNR = 20 dB, (d) SNR = 35 diB, (e) SNR = 50 dB, and (f) SNR = 100 dB
properties as during the training phase. The local aver- investigation area). This behavior is not surprising, asage errors are given in Figure 5. For different signal-to- confirmed by the experimental results reported in [26],noise ratios, the plots of a and at related to both the wherton e problem of the pollution of the useful signalMLP-NN and the SVM-based procedures are shown c due to the reflections of the air-ground interface isAs expected, the estimation of the scatterer depth turns clearly pointed out.out to be more difficult than the horizontal detection,However, the performances guaranteed by the SVMprocedure generally outperform those achieved by theMLP-NN approach. Concerning the dependence of Another evaluation of the robustness of the proposedthe reconstruction properties on the SNR value, the approaches has also been obtained by carrying outscatterer is located quite correctly, and C.z < 0.025 the so-called cross validation test. The two methodswhatever the noisy case considered. Moreover, Cy is have been trained with a noisy data set (i.e., a datagreater than 0.05 only in the interface regions (i.e., set whose samples are related to an assigned signal-near the air-soil interface and at the bottom of the to-noise ratio SNRTraining) and tested with a test set
computed in a different noisy environment (SNR Test).
72 ACES JOURNAL, VOL. 18, NO. 2, JULY 2003, SI: NEURAL NETWORK APPLICATIONS IN ELECTROMAGNETICS
5 SNR Training 100 5 SNR Training 100
04
-0.35 e o.o0 '0.35 e 0.01
(a) (b)
5 SNR Training 100 5 SNR Trairig 100
1I-
--0.35 0 0.01 0.35 0 0.01
(c) (d)
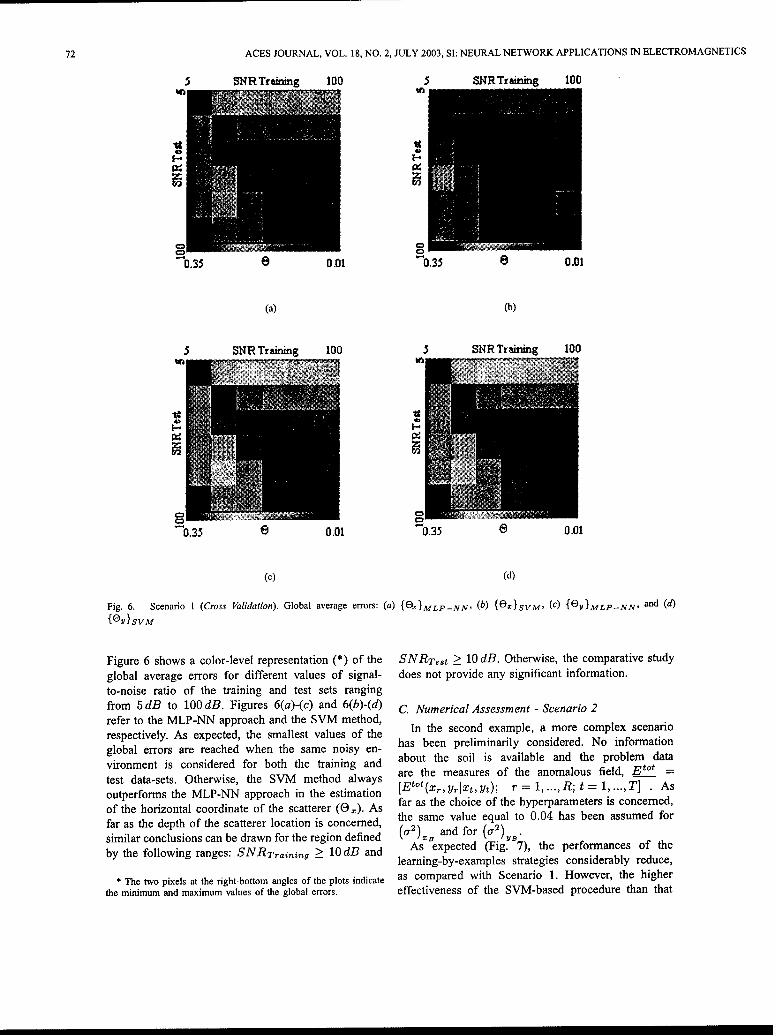
Fig. 6. Scenario I (Cross Validation). Global average errors: (a) {Q'IMLPNN, (b) {le}SVM, (c) {ey}MLP-NN' and (d)
{Oy)SVM
Figure 6 shows a color-level representation (*) of the SNRTst >_ 10 dB. Otherwise, the comparative study
global average errors for different values of signal- does not provide any significant information.
to-noise ratio of the training and test sets rangingfrom 5dB to 100rdB. Figures 6(a)-(c) and 6(b)-(d) C. Numerical Assessment - Scenario 2
refer to the MLP-NN approach and the SVM method,respectively. As expected, the smallest values of the In the second example, a more complex scenario
global errors are reached when the same noisy en- has been preliminarily considered. No information
vironment is considered for both the training and about the soil is available and the problem data
test data-sets. Otherwise, the SVM method always are the measures of the anomalous field, E =
outperforms the MLP-NN approach in the estimation [Etat(xr,yrlxt,yt); r = 1,...,R; t = 1,...,T] . As
of the horizontal coordinate of the scatterer (E •). As far as the choice of the hyperparameters is concerned,
far as the depth of the scatterer location is concerned, the same value equal to 0.04 has been assumed for
similar conclusions can be drawn for the region defined (a2)x, and for (0-2) YB
by the following ranges: SNRTraining > 10dB and As expected (Fig. 7), the performances of thelearning-by-examples strategies considerably reduce,
* The two pixels at the right-bottom angles of the plots indicate as compared with Scenario 1. However, the higher
the minimum and maximum values of the global errors, effectiveness of the SVM-based procedure than that

CAORSI, et at.: ELECTROMAGNETIC INVERSE SCATTERING FOR DETECTION OF BURIED OBJECTS 73
S- - 5 dB Sn - 10 dE
0.3 0.30 X- X0
o.• "..,. x~et / 2.0o.
0.25 ".0S
0.2 , 0.2 0
...o ~ ,.... ... .. ..- o . ---
.0 -o -0.5 0.0 0.3 -. -03 0 . .
-0.5 -03 -0.0 . . -0.5 -03 -0.1 0.0 0.3
(a) (b)
Sn -. 20 M - 3
.. 3 0..........
.. 3 "'10.3 "
,• o.1s
o.5 - 3. 0.... .. 1 • ..3 -0o.5 30. .
(c) (d)
i i te r g bs -eo0a0.3o mh 0.3i hasben5 c o
0.3 ""0.3t '
0.21. On 0.2so, ~Y. X0, ..--o -'• - -: --.. ---- --------
(e) (W
Fig. 7. Scenario 2 (Standard Validation). Local average errors of the MLP-NN and SVM-based procedures for different signal-to-noiseratios i line in Fgr 7. traitinaSNR = 5 dB and SNR = 100 dB
of the MLP-NN method is confirmed. Starting from of the proposed procedures has been carrded out inSNR = 20 dB, the local error values turn out to be different test cases that have clearly confirmed thesmaller than 0.15. On the contrary, the performances higher robustness of the SVM-based approach in solv-of the MLP-NN method strongly worsen, as indicated ing difficult approximation problems as compared withby the dashed lines in Figure 7. traditional neural networks. Several scenarios have
been considered and the behaviors of the two inductiveV. CONCLUSIONS models have been illustrated for different operating
In this paper, two inductive methods for the detec- conditions. The obtained results have demonstrated thetion of buried objects have been extensively compared. successful application of the SVM-based procedure toStarting from an integral formulation of the scattering solve inverse-scattering problems. Future work, cur-equations, the buried-object localization has been re- rently under development, will be devoted to improvingformulated as a regression problem and successively the performances of the SVM-based procedure and tosolved by means of two learning-by-examples strate- determining customized kernel functions.gies, namely, the MLP-NN approach and the SVM-based procedure. The estimation of the effectiveness

74 ACES JOURNAL, VOL. 18, NO. 2, JULY 2003, SI: NEURAL NETWORK APPLICATIONS IN ELECTROMAGNETICS
REFERENCES [23] J. Platt, "Fast training of support vector machines using sequen-tial minimal optimization," in Advances in Kernel Methods -
[1] C. Dourthe, C. Pichot, J. C. Dauvignac, and J. Cariou, "In- Support Vector Learning, The MIT Press (B. Sch6lkopf, C.version algorithm and measurement system for microwave Burges, and A. Smola, Eds.), 1999.tomography of buried object," Radio Science, vol. 35, pp. 1097- [24] S. Caorsi and M. Raffetto, "Perfectly matched layer for1108, 2000. truncation of the finite element meshes in layered half-space
[2] T. J. Cui and W. C. Chew, "Novel diffraction tomographic geometries and applications to the electromagnetic scatteringalgorithm for imaging of two-dimensional targets buried under by buried objects," Microwave and Optical Tech. Lett., vol. 19,a lossy earth," IEEE Trans. on Geoscience and Remote Sensing, pp. 427-434, 1999.vol. 38, pp. 2033-2041, 2000. [25] R. A. Jacobs, "Increased rates of convergence through learning
[3] A. Joisel and J. C. Bolomey, "Rapid microwave imaging of rate adaption," Neural Networks, vol. 1, no. 4, pp. 295-307,living tissues," Proc. of the SPIE - The International Society 1988.for Optical Eng., vol. 39, pp. 320-330, 2000. [26] P. Millot, P.Borderies, E. Guillanton, E. Le Brusq, I. Y.
[4] P. Chaturvedi and R. G. Plumb, "Electromagnetic imaging Dauvignac, and Ch. Pichot, "Radar imaging of shallow buriedof underground targets using constrained optimization," IEEE objects using an ultra-wideband technique with specific anten-Trans. on Geoscience and Remote Sensing, vol. 33, pp. 551- nas and synthetic antenna processing," in Proc. PIERS 2000,561, 1995. Cambridge, MA, p. 298, July 2000.
[5] T. J. Cui, W. C. Chew, A. A. Aydiner, and S. Chen, "Inversescattering of two-dimensional dielectric objects buried in alossy earth using distorted Born iterative method," IEEE Trans.Geoscience and Remote Sensing, vol. 39, pp. 339-345, 2001.
[6] S. Caorsi, G. L. Gragnani, and M. Pastorino, "Numerical elec-tromagnetic inverse-scattering solutions for two-dimensionalinfinite dielectric cylinders buried in a lossy half-space," IEEETrans. Microwave Theory and Techniques, vol. 41, pp. 352-356, 1993. Salvatore Caorsi received the laurea de-
[7] K. Belkebir, R. E. Kleinman, and C. Pichot, "Microwave gree in electronic engineering from theimaging-location and shape reconstruction from multifre- University of Genoa, Italy, in 1973. Sincequeney scattering data," IEEE Trans. on Microwave Theory 1994, he has been a Full Professor ofand Techniques, vol. 45, pp. 469-76, 1997. Electromagnetic Compatibility at the De-
[8] L. T. Rekanos, T. V. Yioultsis, and T. D. Tsiboukis, "Inverse partment of Electronics, University of iscattering using the finite-element method and a nonlinear Pavia, Italy. He is also teaching the courseoptimization technique," IEEE Trans. on Microwave Theory of Antennas at the University of Genoa.and Techniques, vol. 47, pp. 336-344, 1999. M His primary activities focus in applications
[9] S. Caorsi, A. Massa, M. Pastorino, "A computational technique of electromagnetic field to telecommunica-based on a real-coded genetic algorithm for microwave imaging tions, artificial vision and remote sensing,purposes:' IEEE Trans. on Geoscience and Remote Sensing, biology and medicine. In particular, he is working on research projectvol. 38, pp. 1697-1708, 2000. concerning human hazard to electromagnetic exposure, numerical
[10] S. Caorsi, A. Massa, and M. Pastorino, " A microwave methods for solving electromagnetic i problems, wave interaction ininverse scattering technique for image reconstruction based the presence of non linear media, inverse scattering and microwave
on a genetic algorithm:" IEEE Trans. on Instrumentation and imaging, and electromagnetic compatibility. Prof. Caorsi is the pastMeasurement, vol. 49, pp. 573-578, 2000. president and founding member of the Inter-University Research
[11] C. Christodoulou and M. Georgiopoulos. Applications of Neu- Center for the Interactions Between Electromagnetic Fields and
ral Networks in Electromagnetics. Boston, Artech House, 2001. Biological Systems (ICEmB). Moreover, he is a member of the
[12] S. Caorsi and P. Gamba, "Electromagnetic detection of dielec- Elettrotecnica ed Elettronica Italiana (AEI), the European Bioelec-
tric cylinders by a neural network approach:' IEEE Trans. on tromagnetic Association (EBEA), and the European Society for
Geoscience and Remote Sensing, vol. 37, pp. 820-827, 1999. Hyperthermic Oncology (ESHO).
[13] E. Bermani, S. Caorsi, and M. Raffetto, "An inverse scatteringapproach based on a neural network technique for the detectionof dielectric cylinders buried in a lossy half-space," in Progressin Electromagnetic Research, vol. 26, pp. 69-90, 2000.
[14] I. T. Rekanos, "On-line inverse scattering of conducting cylin-ders using radial-basis -function neural networks," Microwaveand Optical Technology Letters, vol. 28, pp. 378-380, 2001.
[15] M. Anthony and P. Bartlett. Neural Network Learning: Theo- Davlde Angulta graduated in Electronicretical Foundations. Cambridge, University Press, 1999. Engineering in 1989 and obtained the
[16] V. N. Vapnik. The Nature of Statistical Learning Theory. John Ph.D. in Computer Science and ElectronicWiley & Sons, New York, 1999. Engineering at the University of Genova,
[17] S. Haykin. Neural Networks: A Comprehensive Foundation. Italy, in 1993. After working as a re-Macmillan, New York, 1994. search associate at the International Com-
[18] B. Schdlkopf and A. Smola. Learning with Kernels, The MIT puter Science Institute, Berkeley, USA, onPress, 2002. special-purpose processors for neurocom-
[19] N. Cristianini and J. Shawe-Taylor. An Introduction to Support puting, he joined the Dept. of BiophysicalVector Machines. Cambridge, University Press, 2000. and Electronic Engineering at the Univer-
[20] M. A. Aizerman, E. M. Braverman, and L. I. Rozonoer, sity of Genova, where he teaches digital"Theoretical foundations of the potential function method in electronics. His current research focuses on industrial applicationspattern recognition leaming," Automation and Remote Control, of artificial neural networks and kernel methods and their implemen-vol. 25, pp. 821-837, 1964. tation on digital and analog electronic devices. He is a member of
[21] C.-J. Lin, "Asymptotic convergence of an SMO algorithm IEEE and chair of the Smart Adaptive Systems committee of thewithout any assumptions," IEEE Trans. on Neural Networks, European Network on Intelligent Technologies (EUNITE).vol. 13, no. 1, pp. 248-250, 2002.
[22] D. Anguita, A. Boni, and S. Ridella, "Evaluating the gen-eralization ability of Support Vector Machines through thebootstrap:" Neural Processing Letters, vol. 11, pp. 1-8, 1999.
CAORSI, et al.: ELECTROMAGNETIC INVERSE SCATTERING FOR DETECTION OF BURIED OBJECTS 75
Emanuela Bermani received the "laurea" Andrea Massa received the "laurea" de-
degree in Electronic Engineering, and the gree in Electronic Engineering from the
Ph.D. degree in "Electronic and Computer University of Genoa, Genoa, Italy, in 1992
Sciences" from the University of Pavia, and Ph.D. degree in electronics and com-
Pavia, Italy, in 1997 and in 2000, respec- puter science from the same university in
tively. She is currently an Assistant Profes- 1996. From 1997 to 1999 he was an Assis-
sor in the Department of Information and tant Professor of Electromagnetic Fields at
Communication Technology, University of the Department of Biophysical and Elec-
Trento, Italy. Her main interests are in the tronic Engineering (University of Genoa)fields of electromagnetic direct and inverse teaching the university course of Electro-
scattering, neural networks in electromag- magnetic Fields 1. Since 2001, he has
netics, and biomedical applications of electromagnetic fields, been Associate Professor of at the University of Trento wherehe teaches the courses of "Electromagnetic Fields V", "Electro-magnetic Techniques for Biomedical and Industrial Diagnostics",and "Wireless communications V". At present, Prof. Massa is the
director of the ELEDIALab and a member of the Inter-UniversityResearch Center for Interactions Between Electromagnetic Fields
and Biological Systems (ICEmB). His research work since 1992 hasbeen principally on electromagnetic direct and inverse scattering,optimization techniques for microwave imaging, wave propagationin presence of nonlinear media, applications of electromagnetic fields
to telecommunications, medicine and biology.
Andrea Boni was born in Genova, Italy, in1969 and graduated in Electronic Engineer-ing in 1996. He received a Ph.D. degree inElectronic and Computer Science in 2000.After working as research consultant atDIBE, University of Genova, he joined theDepartment of Information and Communi-cation Technologies, University of Trento,Italy, where he teaches digital electronics.His main scientific interests are on thestudy and development of digital circuits
for advanced information processing, with particular attention to
programmable logic devices, digital signal theory and analysis, statis-
tical signal processing, statistical learning theory and support vector
machines. The application of such interests focuses on identificationand control of non-linear systems, pattern recognition, time seriesforecasting, signals processing.
Massimo Donelli received the "laurea"degree in Electronic Engineering from theUniversity of Genoa, Italy, in 1998. Heis currently a Ph. D. student in SpaceScience and Engineering and works as aconsultant for the Department of Informa-tion and Communication Technology, Uni-versity of Trento, Italy. His main interestsare on electromagnetic inverse scattering,adaptive antennas synthesis, optimizationtechniques for microwave imaging, wave
propagation in superconducting materials.