delay-dependent robust stability and control of … -mail: [email protected] **mechanical engineering...
TRANSCRIPT

Journal of Mathematical Control Science and Applications (JMCSA)Vol. 1, No. 1, June 2007, pp. 11-27
© International Science Press
* Department of Systems Engineering, King Fahad University of Petroleum and Minerals. E-mail: [email protected]** Mechanical Engineering Department, Ecole Polytechnique de Montreal, P. O. Box 6079, Station Central Ville, Montreal, Quebec H3C 3A7,
Canada, E-mail:[email protected]
Delay-Dependent Robust Stability and Control ofUncertain Discrete Singular Systems with State-Delay
Magdi S. Mahmoud* & El-Kébir Boukas**
Abstract: A new delay-dependent criterion is developed for robust stability of linear discrete-time singularsystems with state-delay and parametric uncertainties. The time-delay is varying between known bounds and theuncertainties are assumed to be time-invariant and norm-bounded appearing in the state and delay matrices. Thenew criterion is achieved by an expanded state-space system representation. A solution to delay-dependentstabilization is attained based on guaranteed cost and H� control approaches. All the developed results areconveniently cast in the format of linear matrix inequalities (LMIs) and numerical examples are presented.
Keywords: Singular systems, Discrete delay systems, Robust stability, Robust control, LMIs.
1. INTRODUCTION
For more than two decades, there has been numerous research studies related to singular systems or alternativedesignations such as descriptor systems, implicit systems [1], generalized state-space systems [6], differential-algebraic systems [4] or semistate systems. There are several applications of singular systems including large-scale systems, power systems, economic systems, to name a few [10, 11]. Recently, robust stability and robuststabilization problems of singular systems have been under investigation [5, 16, 17, 18]. From these results, itbecomes clear that the robust stability problem for singular systems is more involved than the counterpart instate-space systems. Unlike ordinary state-space systems, singular systems require, in addition stability robustness,consideration of regularity and absence of impulses (case of continuous systems) or causality (case of discretesystems) simultaneously [5,7].
On another research front, it becomes quite evident that delays occur in physical and man-made systemsdue to various reasons including finite capabilities of information processing among different parts of the system,inherent phenomena like mass transport flow and recycling and/or by product of computational delays [2, 13].Considerable discussions on delays and their stabilization/destabilization effects in control systems have attractedthe interests of numerous investigators in recent years, see [13] and their references. Recent related results ondiscrete delay systems are presented in [3, 12, 14].
The class of discrete-time singular has been examined for robust stabilization in [17,18]. From the literature,it appears that the stabilization problem for discrete-time singular and state-delay and bounded-but-unknownparametric uncertainties is not fully investigated and most of the existing results are established under specialconditions. In this paper, we examine the stabilization problem using guaranteed cost and H� control approaches.In this paper, a new expanded state-space representation is developed which converts the singular time-delaysystem into an equivalent singular system in which all the original system matrices are grouped into the new
Journal of Mathematical Control Science and Applications (JMCSA)Vol. 1 No. 1 Vol. 1 No. 1 (January-June, 2015) ISSN : 0974-0570
11
Journal of Mathematical Control Science and Applications (JMCSA)Vol. 1 No. 1 (January-June, 2015), ISSN : 0974-0570

12 Journal of Mathematical Control Science and Applications (JMCSA)
system matrix. The benefit gained is that we do not require overbounding of the quantities involved. Theseadvantages simplify the derivation of new delay-dependent stability and state-feedback stabilization results. Allthe results are formulated as linear matrix inequalities. A numerical example is worked out toillustrate thetheoretical developments.
Notations: In the sequel, the Euclidean norm is used for vectors. We use tW , 1�W , ( )W� and �� ��W to
denote, respectively, the transpose, the inverse, the eigenvalues and the induced norm of any square matrix Wand W > 0 (W < 0) stands for a symmetrical and positive- (negative-) definite matrix W. The n-dimensional
Euclidean space and the space of bounded sequences are denoted by I R �n n and 2� , respectively. The symbol
• will be used in some matrix expressions to induce a symmetric structure, that is if given matrices L = Lt and R= Rt of appropriate dimensions, then
� � �� �� �� �� �
� � � �
tL L N
N R N R
Sometimes, the arguments of a function will be omitted when no confusion can arise.
Fact 1: Given a scalar 0�� and matrices 1� , 2� and � such that � � �t I , then
11 2 2 1 1 1 2 2
�� �� � � � � � � � � � � �t t t t t� �
2. PROBLEM STATEMENT AND DEFINITIONS
We consider the following class of discrete-time singular systems with state-delay and parametric uncertainties:
1 0 0� � � �� � � � � � �k o k d k d o k kE x A x A x B u w x �
� �k o k o kz C x D u (2.1)
where xk � IRn is the state, uk � IRp is the control input, wk � IRr is the external disturbance, zk � IRq is the
observed output and � �d d d is an unknown integer representing the delay and �d d are known bounds. The
matrix E � IRn×n may be singular; we assume that rank � �E r n . The matrices �� � �n n
oA IR �� � n n
dA IR and
�� � n p
oB IR are represented by
[ ] [ ] [ ]� � � � �o d o d k a dA A A A M N N (2.2)
where �� n noA IR , �� �n p
oB IR �� �n ndA IR � �� � �� �mn n n rM IR IR �� �nn n
aN IR �� nn ndN IR and
�� �nn pbN IR are real and known constant matrices with �k is a bounded matrix of uncertainties satisfying
� � �tk k I . The uncertainties that satisfy (2.2) are referred to as admissible uncertainties.
For the time being we set 0 0 0 0� �� � � � � � � �k k d k du A x to yield the free nominal singular system
12

Delay-Dependent Robust Stability and Control of Uncertain Discrete Singular... 13
1� � �k o kE x A x (2.3)
For system (2.3), we recall the following definitions and results:
Definition 1. [10,16,18]:
1. System (2.3) is said to be regular if ( )� odet zE A is not identically zero.
2. System (2.3) is said to be causal if it is regular and ( ( )) ( )� �odeg det zE A rank E .
3. System (2.3) is said to be stable if all the roots of ( )� odet zE A lies inside the unit disk with center at
the origin.
4. System (2.3) is said to be admissible if it is regular, causal and stable.
Next we consider the free nominal singular delay system
1� �� � �k o k d k dE x A x A x (2.4)
Extending on Definition (1), we provide the following
Definition 2. System (2.4) is said to be regular and causal if the pair ( )� oE A is regular and causal. System
(2.4) is said to be admissible if it is regular, causal and asymptotically stable.
The objective of this paper is to develop delay-dependent methodologies for robust stability and stabilizationfor the class of uncertain, discrete-time singular delay systems of the type (2.1). This will be accomplished inSection 3 (delay-dependent stability) and Sections 4 (delay-dependent Control) based on guaranteed cost controland H� control. This is made possible through the establishment of a new expanded state-space representationin which converts the singular time-delay system into an equivalent singular system in which the system matrixcontains all the matrices of the original and the delay state has simple, certain and fixed matrix even if theoriginal delay matrix is uncertain.
3. DELAY-DEPENDENT STABILITY
In the sequel, we employ the difference operator 1
�
� ��k k kx x� to rewrite system (2.1):
1
1
( )
� � � �
�
� � �� �
� � �
� � � � ��k o k d k d o k
k
o d k d j o k
j k d
E x A x A x B u
A A x A B u�
Together with the definition of �k, we get
1
0 ( )�
� � �� �
� � � � � � ��k
o d k k d j o kj k d
A A E x E A B u� � (3.1)
Define1�
� �� �� k
k jj k dD� then it follows that
13

14 Journal of Mathematical Control Science and Applications (JMCSA)
1� �� � �k k k k dD D� �
Introducing
[ ] � � �� � � �t t t tk k k k od o dx D A A A� �
we readily obtain the new expanded state-space system
2 1
0 0 0 0 0 0 0
( ) 0 0 0 0 0 0
0 0 0 0 0 0� � � �
� � � � � � � �� � � � � � � �� � � � � � � �� � � � � � � �� � � � � � � ��� � � � � � � �
k od d k k d o k
I I I
A E E A B u
I I I I
� � �
1 �� �� � � odk k k d kU uBA A� �� � � (3.2)
where the initial conditions are characterized by
0
0 0
0 0 0
10
( )
� �� �� �� �� �� �� �� �� �� �� �� �� �� �� �� �� �� �� �� �� �� �
� �� �� �� �
�� �� � �� �� �� �
��
� � � �
� j
o d d
xj d
x
D A E A
D
��
�
� �(3.3)
Remark 1. In short, if xk is a solution of uncertain delay system (2.1) with 0� �k and 0�ku , then k� is
a solution of the new expanded state-space system (3.10) subject to (3.15) and the reverse is true. This is theessence of descriptor transformation [8,9]. It is significant to observe that in system (3.10) the delay matrix has
a simple, certain and fixed matrix even though the original delaymatrix �dA is uncertain. In addition, all the
matrices of the original singular system are grouped into the new system matrices and henceforth we call it the“Compact Form (CF)”.
We rewrite the CF matrix
� � � �o kM N� �� � (3.4)
with
0 0
0 0
[ 0 ]
� � � �� � � �� � � � � � �� � � �� � � �� � � �
� � � � � � � � �
o od d
ad d ad a d od o d
I I
A E E A M M
I I
N N N N N N A A A
��
To derive tractable conditions for stability, we introduce the following Lyapunov functional
14

Delay-Dependent Robust Stability and Control of Uncertain Discrete Singular... 15
( ) ( ) ( ) ( ) ( )� � � �k a k b k c k d kV V V V V� � � � � (3.5)
with
3 3( ) 0 �� � � � �t t t n na k k kV U PU P P IR� � �
1
( ) 0 IR [ 0 0]�
�
� �
� � � � � � ��k
t t n ntb k j j
j k d
V I I II� � �� � �
1 1
2 1
( ) 0 IR [0 0]� � �
�
�� � � � �
� � � � � � �� � � ��d k
tt t n nc k j j
p d j k p
V I I II� � �� � �
1
1
( ) [( 1) ]� �
�� � � �
� � � �� � ��d k
ttd k j j
p d j k p
V j p k II� � �� (3.6)
where
3 3 1 3 3
0 0
0 IR 0 IR
� � � �� � � �� �� � � �� � �� � � �� � � �� � � �� � � �� � � �� � � �
� � � � � � �� � � �
� �x xf f
n n n nd d
s s
X
X
� � � �
� � � �
�
0 0 0� � � �� � � � � � � � � � � � � �� � � � � � �t n n t n n t n n n nx x d d s s fIR IR IR IR
0 0 0� � � �� � � � � � � � � � � � � �� � � � � � �t n n t n n t n n n nx x d d s s fIR IR IR IR (3.7)
Based on (3.23), we define
0
0
0
�� �� �� � �� �� �� �� �
�� �
� � � � �x f
tdII
0 0� � �� � � � � � � � �� � � � �t n n n n t n nx x f d dIR IR IR
0
0
0
�� � �
� �� �� � �� �� �� �� �
���� �
� � � � �x f
tdd I d dI
0 0� � �� � � � � � � � � �� � � � �t n n n n t n nx x f d dIR IR IR
15

16 Journal of Mathematical Control Science and Applications (JMCSA)
0
0
� �� �� � �� �� �� �� �� �� �
� � �� �
�� �
� � � � �
�
x ft
d
s
U U
0 IR 0 0� � � �� � � � � � � � � � � � � �� � � � � � �t n n n n t n n t n nx x f d d s sIR IR IR
1( ) ( 1)
2� � � � � � �d d d d d d (3.8)
The following theorem establishes LMI-based sufficient conditions for dealy-dependent robust stability of
system 2( )� .
Theorem 1 . System 2( )� with 0�ku is delay-dependent robustly stable if there exist matrices
0 ,�� � �� � t n nx x IR 0 ,0 ,� �� � � � � �� � � �t n n t n n
d d s sIR IR ,0 ,� �� � � �� � �n n t n nf x xIR IR 0 ,�� � �� � t n n
d d IR
,0 ,� �� � � �� � �n n t n nf s sIR IR 0 ,�� � � �� � �t t n n
x x x IR 0 ,�� � �� �t n nd d IR 0 ,�� � �� � t n n
x x IR
0 ,�� � �� � t n nd d IR ,� �� �� �n n n n
f fIR IR and a scalar � > 0 such that the following inequality holds for alladmissible uncertainties.
0
00
0
�� �� � � � �� �� �� � �� �� � � �� �
� � � �� �� �
� �
�
�
a n
ttd
t
Z d
II AM M
I
�
��
(3.9)
where
0
� �� �� �� �� �� �� �� �� �� �� �� �� �� �� � � �� � � �
� � �� � � � � � � � �
� �
� � � � � � �
� � � � � � �
� � �
ttx f x adx od x f ft t tt t t
a f d n f adf od f d dt t
s d s ds
A N
A N
A N(3.10)
Proof: We consider kV and evaluate the first difference of the functionals � �a b cV V V and dV . For �aV we
have
1( ) ( )� �a k a kV V� � = 1 1� � �t t t t t tk k k kU PU U PU� � � �
= [ ] [ ]� �� �� � �� �t t t td dk k d k k d k kU UA A A A� � � �� � � � � �
= [ ] 2� � �� � �� � � �� � � �t t t t t tt t td d dk k k d k d k k dU UA A A A A A� � � � � �� � � � � � (3.11)
For Vb, we have
16

Delay-Dependent Robust Stability and Control of Uncertain Discrete Singular... 17
1( ) ( )� �b k b kV V� � =1
1
�
� � � � �
�� �� �k k
t tt tj j j j
j k d j k d
I II I� � � �
= � �� �� �t tt tk k k d k dI II I� � � � (3.12)
For �cV we have
1( ) ( )� �c k c kV V� � =
1 1 1
2 2 1
� � � � �
�� � � � �� � � � �
�� � � �� ��d dk k
tt t tj j j j
p d j k p p d j k p
QI deI QII� � � �
1 1
1 12
[� � �
� � � ��� � � �
� � �� �� � �� � �d k
t t tt t tk k j j k p k p
p d j k p
QI QI QII I I� � � � � �
1
1
]�
� � �
� � ��k
ttj j
j k p
QII� �
1 1
1 12 2
� � � �
� � � ��� � �� �
� �� �� �� �d d
t tt tk k k p k p
p d p d
QI QII I� � � �
1
( )�
� � �
� � � ��� �� �k d
t tt tk k j j
j k d
d d QI QII I� � � � (3.13)
For �dV we have
1( ) ( )� �d k d kV V� � =1 1
[( ) ]�
�� � � � �
� �� � ��d k
ttj j
p d j k p
j p k QII� �
1
1
[( 1) ]� �
�� � � �
� � � �� � ��d k
ttj j
p d j k p
j p k QII� �
1 1
� �
� ��� � �� �
� � �� �� �� �d d
t tt tk k k p k p
p d p d
p QI QII I� � � �
1
1( ) ( 1)
2
�
� � �
� � � � � � �� � �� �k d
t tt tj j k k
j k d
QI d d d d QII I� � � � (3.14)
It follows from (3.17) and (3.40)-(3.43) that
1� �k kV V = [ ] 2� � �� � �� � �� � � �t t t t t tt t td d dk k k d k d k k dU UA A A A A A� � � � � �� � � � � �
+ � ��� �t tt tk k k d k dI II I� � � �
+1
( )�
� � �
� � �� �� �� �k d
t tt tk k j j
j k d
d d I II I� � � �
17

18 Journal of Mathematical Control Science and Applications (JMCSA)
–1
1( ) ( 1)
2
�
� � �
� � � �� � �� �� �k d
t tt tj j k k
j k d
I d d d d II I� � � �
= [ ] 2� � �� � �� � �� � � �t t t t t tt t td d dk k k d k d k k dU UA A A A A A� � � � � �� � � � � �
+ � ��� �t tt tk k k d k dI II I� � � �
+1
[ ( ) ( 1)]2
� � � � ���ttk kd d d d d II� �
=
� �� � � ��� � � ��
� � � �� � � �� � � �� �� � � �
� �� �� ��� �� �� � �� �
��
� ��
� �
� �
ttt t
dk ktt
k d k dttd d
U UA AA A
I d II III A A
� �� �
� �
� �� �
= ( )� � � �� � � ��� � � �� � � �� � � �� �� � � �
� � �t
k k
k d k d
d� �� � (3.15)
By Laypunov theory, asymptotic stability ( 1 0 0� � � �� �k k kV V � ) implies that ( ) 0�� �d which by Schur
complement is equivalent to
0
0
��� �� � �
� �� � � �� �� �� � �� �
��� � �
� �
�
tt tt
ttd
U U I d I PI AIII A
�
� (3.16)
In terms of (3.7) we use the congruence transformation [ ]diag X I X and invoking the linearizations
(3.8) then inequality (3.16) becomes
0
0
��� �� � �
� �� � � �� �� �� � �� �
� � �
�
�
t
ttd
d X AII A
�
� (3.17)
Further simple Schur complements with arrangements bring inequality (3.17) to (3.9) and the proof iscompleted.
Remark 3.2. In contrast with the works in [8,9], it significant to observe that the use the developed CFrepresentation has overcome the use of overbounding inequalitites to remove cross terms thereby leading toless conservative delay-dependent stability results.
In the absence of uncertainties we get the following corollary
18

Delay-Dependent Robust Stability and Control of Uncertain Discrete Singular... 19
Corollary 3.1. System 2( )� with 0� �ku 0 0� � �aM N and 0�dN is delay-dependent quadratically
stable if there exist matrices 0 ,�� � �� � t n nx x IR 0 ,�� � �� � t n n
d d IR 0 , ,� �� � � �� � �t n n n ns s fIR IR
0 ,0 , ,0� � �� � � � � � � � �� � � � � �t n n t n n n nx x d d f sIR IR IR , 0 ,0 ,� � �� � � � � � �� � � � �t n n t n n t n n
s x x d dIR IR IR
0 ,0 , ,� � �� � � � � � �� � � � �t n n t n n n nx x d d fIR IR IR ��� n n
f IR satisfying the following inequality
0
0
�� �� � � �� �� � � �� �� �� � �� �
� � �
�
�
a
ttd
d
II A� (3.18)
4. DELAY-DEPENDENT CONTROL
Next, will derive expressions for gain matrix oK using guaranteed cost and H� control approaches. Let the
state-feedback control be
� � �o k o ku K x K I � (4.1)
1. Guaranteed Cost Control Synthesis
The cost function associated with system 2( )� is:
0
J�
�
� �� �t ttg k k k k
k
I u RuI� � (4.2)
where 0 0� �� � � � � � �� � t n n t m mIR R R IR are weighting matrices and 3[ 0 0] �� � n nI I IR . To proceed
further, we start by the following definition [12]:
Definition 4.1. Consider system 2( )� with cost function (4.2) and 0�kw . The state-feedback control law
(4.1) is said to be a guaranteed cost control (GCC) with quadratic cost matrix � > 0 if given matrices
0 IR �� � �� � t n n and 0 �� � � �t m mR R IR the following LMI
0 0
00
0
�� �� �� �� �� � �� �� � �� �
� � �� �� �
� � � �
� � �
�
t t tto
ttd
U U K RIII
et R
�
�
(4.3)
has a feasible solution with respect to � for all admissible uncertainties � kA satisfying (2.2).
In the sequel we take
19

20 Journal of Mathematical Control Science and Applications (JMCSA)
�� � � ���� � �tt tD I d I II II
Remark 4.1. It is readily seen that inequality (4.6) with 0 0� � �oK S reduces to the results attained in
[15] ensuring the delay-dependent asymptotic stability of the uncontrolled system (3.2).
Introducing
0
0 0 0
0
�� � �
� �� �� � � � � � � � � � � �� �� �� �� �
�� �
� � � � � � � � � �x f
t n n n n t n ntd x x f d dI IR IR IRI
The following theorem provides a necessary and sufficient condition for GCC.
Theorem 1. Consider system 2( )� with cost function (4.2). There exists a GCC law (4.1) if and only if there
exist matrices 0 ,�� � �� � t n nx x IR 0 ,0 ,� �� � � � � �� � � �t n n t n n
d d s sIR IR ,��� n nf IR 0� ��x
,��� t n nx IR 0 ,�� � �� � t n n
d d IR ,0 ,� �� � � �� � �n n t n nf s sIR IR 0 ,�� � �� �t n n
x x IR
0 , 0 , 0 ,� � �� � � � � � � � �� � � � � �t n n t n n t n nd d x x d dIR IR IR , ,� �� ��n n n n
f fM IR IR
,��� m nf IR ,��� m n
f IR 0 ,0 ,� �� � � � � �� � � �t n n t n nx xIR IR 0 ,�� � �� � t n n
d d IR ��� n nf IR and a
scalar 0�� such that the following LMI holds for all admissible uncertainties
0
0 0
00 0
0 0
�� �� � � � � � �� ��� �� � �� �� �� �� ��� �
�
� �
� � �
� � � �
� � � �
�
�
a c n
t td
t
d
I I A
M M
I
�
�
�
(4.4)
where
0 0
� �� �� �� �� �� �� �� �� �� �� �� �� �� �� � � �� � � �
� �� � �� �� � � � � � � � � � � �� �� �� � � �
� � � � � � � �
� � � � � � � �
� � �
t ttx f x ad xx od x f ft t t tt t t
a f d n f ad c ff od f d dt t
s d s ds
A N R
A N R
A N(4.5)
The feedback gain is given by 1�� ��o x xK .
Proof: By Definition 4.1 and [14], it follows that inequality (4.3) holds if and only if the LMI
20

Delay-Dependent Robust Stability and Control of Uncertain Discrete Singular... 21
0
0
0
�� �� � � �� �� �� �� �� � �� �
� � � �� �� �
��� � � � �
� �
�
tt ttt t to o
ttd
U U I I d I K RI I IAIII A
R
�
�
1
0 0
0 0 0 0
0 0
0 0 0 0
�
� � � �� � � �� � � �� � � �� � � �� � � �� �� � � �� � � �� � � �� � � �� � � �� � � � � � � �
tt t tN N
PM PM� �
1
0
00
0
�
�
� �� � �� �� �� �� �
� �� �� �� �
� �� � � �� �
� � � �� �� �
��
� �
� � � �
� � �
� � �
t t
t t tt to o
t
tto
t
U U III d I K RI II
N N
IIM M
R
�
�
�
�(4.6)
holds for a scalar 1 0�� . Applying the congruence transformation 1[ ] �� �� � � �I I and recalling
�, �, � and �, we get
10
00
0
(4 43)
�
�
� �� � � �� �� �� �� �
� �� �� � � �� �
� ��� �
� � � �� �� �
� � � �� �
� �
� �
�
t tto ot
tto
t
dX K RI
N N
IIM M
R
�
�
�
� (4.7)
Using (3.4) and (3.8) into (4.7) with Schur complement we obtain LMI (4.4).
In the case of nominal system, Theorem 4.1 reduces to:
Corollary 4.1. Consider system 2( )� with 0 0 0� � � � �a dM N N and cost function (4.2). There exists a
state feedback gain oK such that the control law (4.1) is a GCC with a quadratic cost matrix � > 0 given
21

22 Journal of Mathematical Control Science and Applications (JMCSA)
matrices 0 <S = St and 0 < R = Rt if and only if there exist matrices there exist matrices 0 ,�� � �� � t n nx x IR
0 ,�� � �� � t n nd d IR 0 , ,� �� � � �� � �t n n n n
s s fIR IR 0 ,�� � �� � t n nx x IR 0 ,�� � �� � t n n
d d IR
,��� n nf IR 0 , 0 ,� �� � � � � �� � � �t n n t n n
s s x xIR IR 0 ,�� � � �� � �t t n nd d d IR
0 ,�� � �� � t n nx x IR 0 ,�� � �� � t n n
d d IR , ,� �� �� �n n n nf fIR IR ,��� m n
x IR
,��� m nf IR 0 ,�� � �� � t n nIR 0 , 0 ,� � �� � � � � � �� � � � �t n n t n n n n
x x d d fIR IR IR satisfying the
following LMI for all admissible gain perturbations
0
00
0
�� �� � � � � �� �� �� � � �� �� � �� �
� � � �� �� �
� � � �
� �
�
a c
ttd
d
II
R
�
(4.8)
The GCC feedback gain is 1�� ��o x xK .
4.2 Example 1
Consider the discrete-time system with data as follows:
� � � �
1 0 6 0 5 0 2 0 1 0 2 0 1
0 4 0 5 0 6 0 4 0 0 1 0 1
0 0 12 5 2 1 1 1
0 3 0
5 0 10 0 1 0
0 5 0 10 0 0
� � � � � � �� � � � � � � �� � � � � � �� � � � � � � �� � � � � �� � � � � � � �
�� � � �� � � � � � � � � � �� � � ��� � � �� � � � � �
� � � � � �� � � � � �� � � � � �
o d o
t ta d o o
A A B M
N N d d C D
R S E
Observe that the system is open-loop unstable. Solving LMI (4.10) we obtain a feasible solution yielding thecontrol law
4 6249 0 2935
6 1869 0 3778
� � �� �� � �� � �� �
k ku x
as the desired GCC controller with J 4 1568� �g .
22

Delay-Dependent Robust Stability and Control of Uncertain Discrete Singular... 23
5. H CONTROL SYNTHESIS
In the sequel, we extend the results attained in the forgoing section to the case of H� control. Application of
(4.1) to system 2( )� yields the closed-loop system
1 �� �� � � �dk k k d kU wA A� �� � �
[ ]� �� � � � � �o dk k d kM N wA A� �� �
0(5 1)
(5 2)
0
�� �� �� � � � � �� �� �� �
ko od o o d
I I
A B K E E AAI I
�
[ ]� � � �k o o o k o kz C D K x I � (5.3)
Let{ } { }�k kz w be the sequences of the observed output and external disturbances with respective norms
�� ��� �� ��k kz w . Then it is required for a given 0�� to have
2 2 22J 0 0 { } 0 0��� �� � �� �� � � � � � � � � � ��h k k k kz w w h k� �
This means that given a prespecified disturbance attenuation level �, it is required to develop conditions forthe state-feedback controller (4.1) that render the closed-looped system (5.1) quadratically stable for all admissible
uncertainties � � �tk k I . Following [3], we have the following definition:
Definition 5.1. Consider system (�2). The state-feedback control law (4.1) is said to be a H� with disturbance
attenuation � > 0 if there exists matrices 0 �� � �� �t n nIR and 0 IR �� � �� �t n n such that the following
LMI
2
0
0 0
00 0
0
�� �� �� � �
� �� �� �
� � �� � �� �
� � � �� �� �� � � � � � � �� �
��� � � � � � � �
� � �
�
�
tt t tt t tk o k
ttd
t t
U U I d II IIII
I
I I I
� �
�
�
(5.2)
has a feasible solution with respect to � for all admissible uncertainties � kA satisfying (2.2)
The following theorem summarizes the corresponding result.
Theorem 5.1. Consider system (�2). There exist state feedback gain oK such that the control law (4.1) is a
H� control with disturbance attention � > 0 if and only if there exist matrices 0 ,�� � �� � t n nx x IR
23

24 Journal of Mathematical Control Science and Applications (JMCSA)
0 ,0 , ,� � �� � � � � � �� � � �t n n t n n n nd d s s fIR IR X IR 0 ,�� � �� � t n n
x x IR 0 ,�� � �� � t n nd d IR
, 0 , 0 ,� � �� � � � � � �� � � � �n n t n n t n nf s s x xIR IR IR 0 ,�� � �� �t n n
d d IR
0 , 0 ,� �� � � � � �� � � �t n n t n nx x d dIR IR , , ,� � �� � �� � �n n m n m n
f x fIR IR IR 0 �� � �� �t n nIR
and scalars 1 30 0� � �� � satisfying the following LMI for all admissible uncertainties
1
23
1
3
0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 00
0 0
0 0
0
�� �� � � � � � � �� �� �� �� �� � � �� �
� � � �� � �� �� � � � � � �� �
� � � � � �� �� �� � � � � � �� �� �� � � � � � � �� �
� � �
�
�
�
b nc b ntt
d
t
tt
d
II AM M
I
I M IM
I
I
�
�
� �
��
(5.3)
The feedback gain is 1�� ��o x xK , where
0
� �� �� �� �� �� �� �� �� �
� � � �� � � � � �
�
� � � � � � �
� � � � � � �
�
t t t t tx f x od x o x f ft t t t t t t t
b f d f od f o f d dt
s d s
A B E E
A B E E
X A(5.4)
Proof: A simple Schur complement converts (5.2) into
2
0 0
0 0 0
0 0 00
0 0
��� ��
�
� �� � �� �
�� �� �� � �
�� �� � � �� �
� �� � � � �� �� �
� � � � � �� �� �
��� � � � � � � �
� � �
�
�
�
tt t tt t tk o k
ttk
t
U U I d II IIet II
I
I I(5.5)
By Definition 4.1 and Theorem 4.1 with simple Schur operations, it follows that inequality (5.5) holds ifand only if the LMI
24
Delay-Dependent Robust Stability and Control of Uncertain Discrete Singular... 25
2
0 0
0 0 0
0 0 0
0 0
�
� �� �� ��� �� �� �� �
� � �� �� �� � � �� �
� � � � � �� �� �� � � � � �� �� �
��
�� � � �
� �
� �
�
tt tt tok o oktt
ttd
t
U UI AI d II I
II A
I
I IP
P
� �
�
�
11 1
0 0
0 0 0 0
0 0
0 0 0 0
0 0 0 0
0 0 0 0
�
� � � �� � � �� � � �� � � �� � � �� � � �� � � �� � � �
� � � � � �� � � �� � � �� � � �� � � �� � � �� � � �� � � �
� � � � � � � �� � � � � � � �
� �
tt t tN N
M M� �
13 3
0 0
0 0 0 0
0 0 0 00
0 0 0 0
0 0
0 0 0 0
�
� � � �� � � �� � � �� � � �� � � �� � � �� � � �� � � �
� � �� � � �� � � �� � � �� � � �� � � �� � � �� � � �� � � �
� � � � � � � �� � � � � � � �
� �
tt t tN N
M M
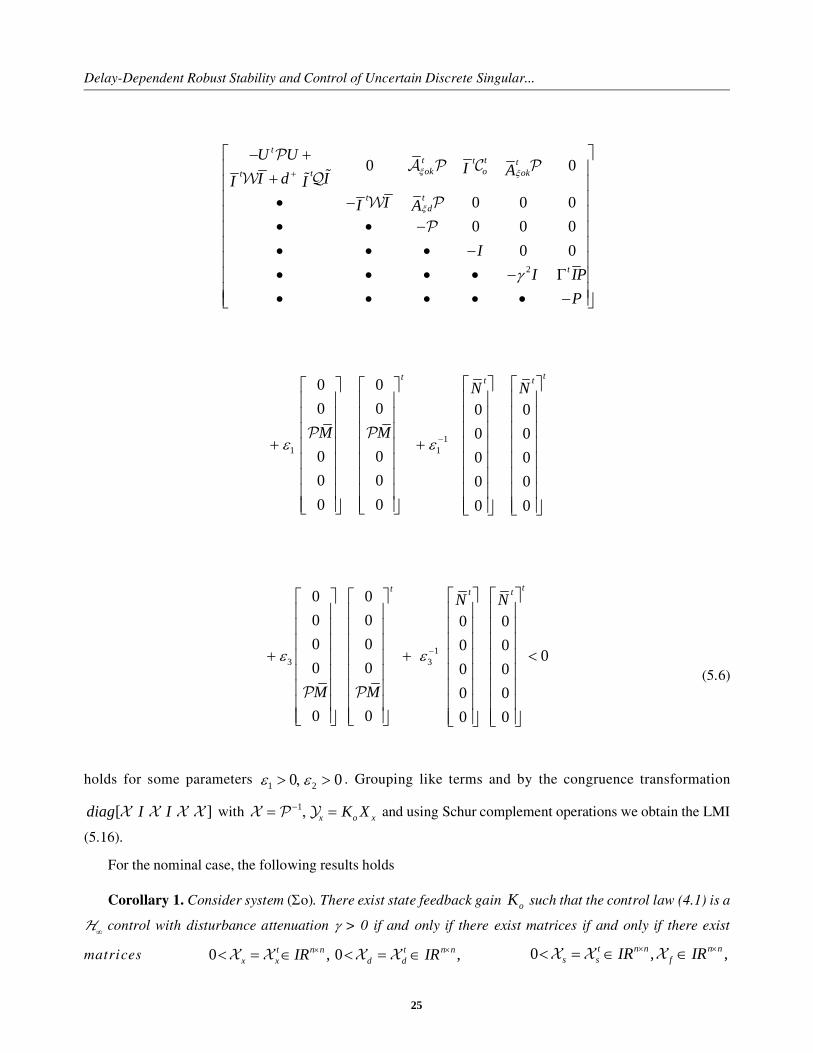
� �(5.6)
holds for some parameters 1 20 0� � �� � . Grouping like terms and by the congruence transformation
[ ]diag I I� � � � with 1x o xK X�� � �� � � and using Schur complement operations we obtain the LMI
(5.16).
For the nominal case, the following results holds
Corollary 1. Consider system (�o). There exist state feedback gain oK such that the control law (4.1) is a
�� control with disturbance attenuation � > 0 if and only if there exist matrices if and only if there exist
matrices 0 , 0 ,t n n t n nx x d dIR IR� �� � � � � �� � � � 0 , ,t n n n n
s s fIR IR� �� � � �� � �
25

26 Journal of Mathematical Control Science and Applications (JMCSA)
0 ,t t n nx x x IR �� � � �� � � 0 ,t t n n
d d d IR �� � � �� � � ,0 ,n n t n nf s sIR IR� �� � � �� � �
0 ,t n nx x IR �� � �� � 0 ,0 ,t n n t n n
d d x xIR IR� �� � � � � �� � � � 0 ,t n nd d IR �� � �� �
, ,n n n nf fIR IR� �� �� � , ,m n m n
x fIR IR� �� �� � 0 t n nIR �� � �� � satisfying the following LMI for all
admissible uncertainties
2
0 0
0 0 0
0 0 00
0 0
b c b
ttd
t
d
I AI
I
I I
�� �� � � � � �� �� �� �� �� � �
� �� �� � � �� �
� �� � � � � �� �
� � � � � �� �� �
� � �
�
�
�
�
�(5.7)
The feedback gain is given by 1o x xK �� �� .
5.1 Example 2
Consider the discrete-time system with data as follows:
� �
0 1 0 0 1 0 6 0 1 0 0 2
0 2 0 5 0 1 0 0 5 0 6 0 0 5 0 1
0 1 0 9 0 0 0 3 0 1 0 1 0
0 05 0 02
0 0 4 2 6
0 3 0
1 0 1
0 2 0 1 0 [0 3 0 1] 0 0 0
0 1 0
� � � �� � � � � � � �� � � � � � � �� � � � � � � � � � � � � � �� � � � � � � �� � � � � � � �� � � �� � � � � � � �� �� � � �
� � � �� � � � � � � �� � � �� � � ��� � � �
�� � � � � � � � �
�
o d o
t ta d
o o
A A B M
N N d d
C D E
�� � �� �� ��
Observe that the system is open-loop unstable. A feasible solution of the LMI (5.16) yields the �H control
law
0 03 0 0914 1 122072 2157
0 0145 1 1879 3 3118
� � � �� �� � � � �� �� � � �� �
k ku x �
26

Delay-Dependent Robust Stability and Control of Uncertain Discrete Singular... 27
6. CONCLUSIONS
For linear discrete-time singular systems with state-delay and parametric uncertainties, this paper has established
(1) An expanded state-space representation to exhibit the delay-dependent dynamics while preserving theequivalence with the original system
(2) A new delay-dependent stability criteria in a systematic way and without relying on overbounding byusing an appropriate Lyapunov-Krasovskii functional, and
(3) A new delay-dependent stabilization based on guaranteed cost and �� control approaches.
All the developed results have been conveniently cast in the format of linear matrix inequalities (LMIs) andnumerical examples are presented. Superiority over existing techniques have been illuminated. Numericalexamples have been presented to illustratethe theoretical developments.
REFERENCES
[1] Aplevich, J. D., “Implicit Linear Systems”, Springer-Verlag, Berlin, 1991.
[2] Boukas, E. K. and Z. K., Liu, Deterministic and Stochastic Time-delay Systems, Birkhauser, 2002.
[3] Boukas, E. K., and Z. Liu, “Robust Stability and �� Control of Discrete-Time Systems with Time-Delay: An LMIApproach”, ASME J. Dynamic Systems, Measurements and Control, Vol. 125, pp. 271-278, 2003.
[4] Campbell, S. L., “Singular System of Differential Equations”, Pitman, San Francisco, 1982
[5] Chen, S. J. and J. L. Lin, “Robust Stability of Discrete Time-Delay Uncertain Singular Systems”, IEE Proceedings ControlTheory and Applications, Vol. 151, pp. 45-51, 2004.
[6] Fang, C. H. and F. R. Chang, “Analysis of Stability Robustness for Generalized State-Space Systems with Structured
Perturbations”, Systems & Control Letters , Vol. 21, pp. 109-114, 1994.
[7] Fang, C. H., L. Lee and F. R. Chang,, “Robust Control Analysis and Design for Discrete-Time Singular Systems”,Automatica, Vol. 30, pp. 1741-1750, 1994.
[8] Fridman, E. and U. Shaked, “Delay-Dependent �� Control of Uncertain Discrete Delay Systems”, European J. Control,Vol. 11, pp. 29-39, 2005.
[9] Fridman, E. and U. Shaked, “Stability and Guaranteed Cost Control of Uncertain Discrete Delay Systems”, Int. J. Control,Vol. 78, pp. 235-246, 2005.
[10] Dai, L., “Singular Control Systems”, Springer-Verlag, Berlin, 1989.
[11] Lewis, F. L., “A Survey of Linear Singular Systems”, Circuits, Systems and Signal Processing, Vol. 5, pp. 3-36, 1986.
[12] Mahmoud, M. S. , “New Results on Robust Control Design of Discrete-Time Uncertain Systems”, IEE ProceedingsControl Theory and Applications, Vol. 152, pp. 453-459, 2005.
[13] Mahmoud, M. S. ,“Robust Control and Filtering for Time-Delay Systems”, Marcel-Dekker, New-York, 2000.
[14] Mahmoud, M. S., “Robust �� Control of Discrete Systems with Uncertain Parameters and Unknown Delays”, Automatica,Vol. 36, pp. 627-635, 2000.
[15] Mahmoud, M. S. and E. K. Boukas, “Uncertain Discrete Singular Systems: Delay-Dependent Stability and Stabilization”,Technical Report MSM-EB-5-2006, Ecole Polytechnique de Montreal.
[16] Xu, S. and C. Yang, “Stabilization of Discrete-Time Singular Systems: A Matrix Inequalities Approach”, Automatica,Vol. 35, pp. 1613-1617, 1999.
[17] Xu, S., C. Yang, Y. Niu and J. Lam, “Robust Stabilization for Uncertain Discrete Singular Systems”, Automatica, Vol. 37,pp. 769-774, 2001.
[18] Xu, S. and J. Lam, “Robust Stability and Stabilization of Discrete Singular Systems: An Equivalent Characterization”,IEEE Trans. Automat. Contr., Vol. 49, pp. 568-574, 2004.
27