depth and motion discontinuities stan birchfield ph.d. oral defense stanford university january 1999
TRANSCRIPT

Depth and Motion Discontinuities
Stan BirchfieldPh.D. oral defense
Stanford UniversityJanuary 1999

• PHOTOMETRIC
• GEOMETRIC
Discontinuities
intensity, color, texture, ...
Depth Motion
camerasurface
camerasurface

• Fundamental to image understanding
• Object boundaries(well-defined)
• Assumption of continuity
• Occlusion
Importance of Discontinuities
camera 1 camera 2
object

Motivation
segmentation
classification
tracking
camera control
video retrieval
detection
IMAGES LOW-LEVEL FILTERS HIGH-LEVEL TASKS

Evidence for Discontinuities
• LOCAL– T-junctions
[Parida et al. 1997, Ruzon & Tomasi 1999]
– Occlusion [Toh & Forrest 1990, Wixson 1993]
– Multi-modal depth or motion[Spoerri & Ullman 1987, Little & Gillett 1990]
– Changes in intensity, color, texture, …[Canny 1986, Wang & Binford 1994]
• GLOBAL– “Continuity of discontinuities”
[Marr & Poggio 1979]
– Changes in depth or motion field[Thompson et al. 1982, Birchfield & Tomasi 1998]

Complications from Sampling
• Amount of discontinuity
• Curvature
?
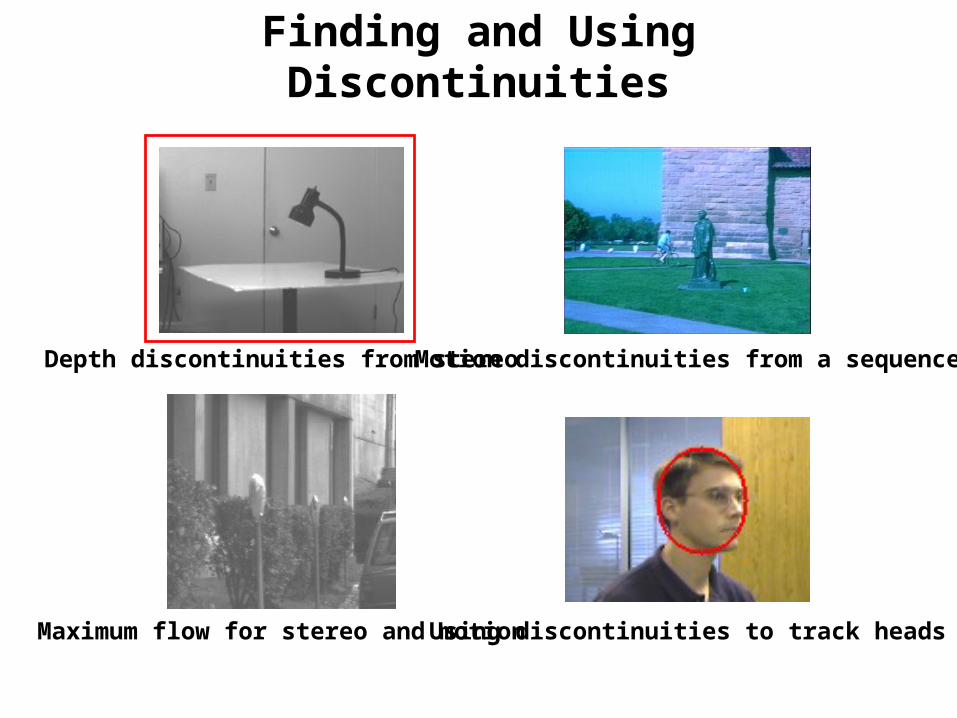
Finding and Using Discontinuities
Depth discontinuities from stereo
Maximum flow for stereo and motion
Motion discontinuities from a sequence
Using discontinuities to track heads

Depth Discontinuities from a Stereo Pair
E E d(x ,x - ) u(l )data smoothness L Lx iiL
Use dynamicprogrammingto minimize:
inte
nsi
ty
L
R
dis
par
ity
lamp
wall
pixel
dissimilarity discontinuitypenalty
epipolarconstraint

Discontinuity Penalty
u(l )i
pen
alty
occlusion length
u(3) = 3u(1)
u(3) < 3u(1)
BADGOOD
l i
L
R
L
R
GOOD BAD
disp
arit
y
pixel
inte
nsi
ty

Stereo Algorithm
• Matches pixels directly with convex penalty function(no preprocessing or windows)
• Handles large untextured regions
• Solves sampling problem
• Handles slanted surfaces
• Is fast
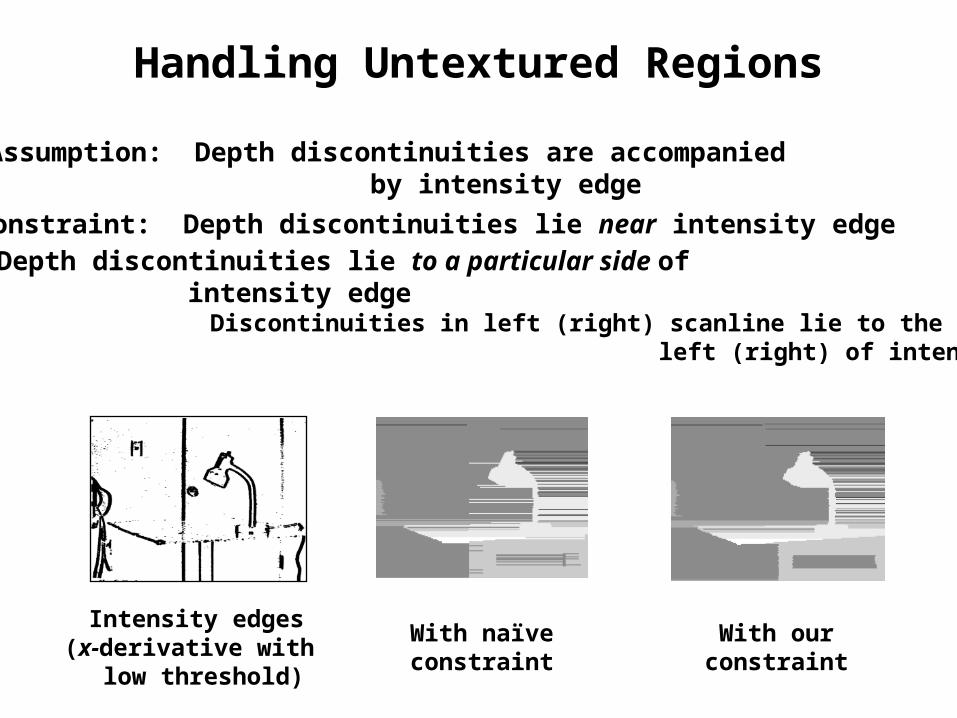
Handling Untextured Regions
Our constraint: Depth discontinuities lie to a particular side of intensity edge Discontinuities in left (right) scanline lie to the left (right) of intensity edge
Assumption: Depth discontinuities are accompanied by intensity edge
Naïve constraint: Depth discontinuities lie near intensity edge
Intensity edges(x-derivative with
low threshold)
With naïveconstraint
With ourconstraint

Discontinuity Lies to the Left of an Edge
near object
far object
leftcamera
rightcamera
Obvious matches
Physicalsetup
Matches violateassumption
Matches areconsistent withassumption
edge
edge
depth discontinuity
depth discontinuity

0
20
40
60
80
100
120
140
inte
nsi
ty (
gra
y l
ev
els
)
The Problem of Image Sampling
0
20
40
60
80
100
120
140
inte
nsi
ty (
gra
y l
ev
els
)
0
2
4
6
8
10
12
14
16
pixel
dis
sim
ilar
ity
(gra
y le
vels
)
Absolute difference
0
2
4
6
8
10
12
14
16
pixel
dis
sim
ilar
ity
(gra
y le
vels
)
Our measure
Left scanline Right scanline

A Dissimilarity Measure That is Insensitive to Image Sampling
d(xL,xR)
xL xR
d(xL,xR) = min{d(xL,xR) ,d(xR,xL)}Our dissimilarity measure:

Analysis of Dissimilarity Measure
Concave/convex regions: measure is guaranteed to work
Inflection points: measure works in practice when lens is defocused to remove aliasing
(inflection points linear {convex, concave})
intensityfunction

020406080
100120140160180200
1 2 3 4 5 6 7 8 9 10
diss
imil
arit
yAnalysis of Dissimilarity Measure
our measure
absolute difference
maximumaverage
Tc = 1fc
cutoff frequency
As a function of lens defocus
0102030405060708090
100
9 10 11 12
actual disparity (pixels)
diss
imil
arit
y
At a hypothesized disparity of 10 pixels
aliasing
{ defocus

Speeding Computation
Dis
par
ity
map
occlusion
depthdiscontinuity
Pruning bad nodes
Standard
Ours
maximum disparity
tim
e
Fastpostprocessing
TWO STEPS:1. Reliable overruns unreliable2. Background overruns foreground
RIGHT
LE
FT

Handling Slanted Surfaces
Independent scanlines:
no coherence
Postprocessing:forbid propagationif disparity changes
by just one level
disp
arit
y
column

Results

More Results
[Images from JISCT data set]

Finding and Using Discontinuities
Depth discontinuities from stereo
Maximum flow for stereo and motion
Motion discontinuities from a sequence
Using discontinuities to track heads

Motion Discontinuities from a Sequence
• Similar to stereo(matching pixels to fit piecewise-smooth function)
• But different(2D search, non-rigid transformation, many images)
• How far can we get using sparse features?

Motion Video

Difficulties of Image Sequences
• Instantaneous velocityfrom sampled positions
• Accumulation of evidence
• Frame of reference, motion model
time
posi
tion
?
feature
posi
tion
time
feature
background
thresholdpo
siti
on
time
feature 2
feature 1
background
threshold

Image Strain
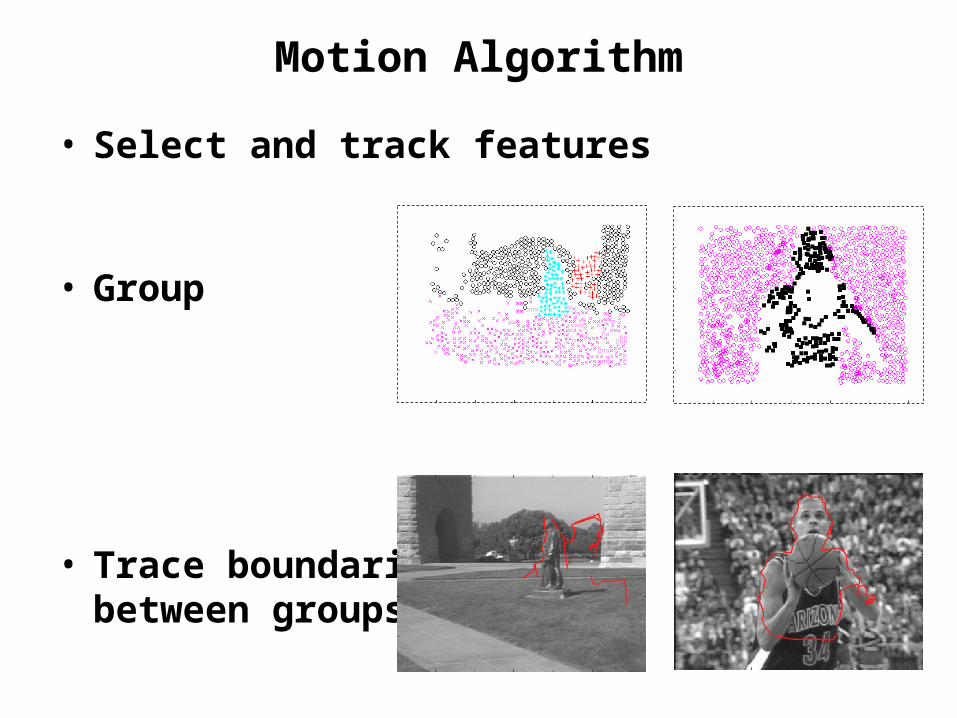
Motion Algorithm
• Select and track features
• Group
• Trace boundariesbetween groups

Finding and Using Discontinuities
Depth discontinuities from stereo
Maximum flow for stereo and motion
Motion discontinuities from a sequence
Using discontinuities to track heads

Why Maximum Flow?
• Our stereo algorithm (Dynamic programming)– Good results on difficult images
– Fast
– But, suboptimal(processes rows, then columns independently)
• Newer algorithms (Maximum flow)– Set up graph, find maximum flow ---
minimum cut yields disparity or motion map
– Able to look at whole image

Minimizing a 2D Cost Function
Minimize:
disparity
p,q
p,q
d(p, )2D:
GL
OB
AL
dis
par
ity
pixel?
p,q
d(p, )
1D:
E E d(p, ) u(l )data smoothness p p,q p,q
{p,q} N
Global
u(l )p,q
Discontinuity penalty:
lp,q
minimum cut = disparity surface
u(l )= lp,q p,q p,qsolves
LO
CA
L Local (GOOD)
(BAD)

Maximum Flow for Stereo and Motion
Global algorithm[Roy & Cox 1998,
Ishikawa & Geiger 1998]
Local algorithm[Boykov et al. 1998]
pen
alty
BAD
discontinuity amount
GOOD

Challenges for Maximum Flow
… and slant of table
With our intensity variation constraint
and large penalty
With small penaltyWith large penalty … and slant of surfaces

Finding and Using Discontinuities
Depth discontinuities from stereo
Maximum flow for stereo and motion
Motion discontinuities from a sequence
Using discontinuities to track heads

Problem
TILT
PAN
ZOOM
CHALLENGES: * rotation * multiple people * zoom
APPLICATIONS: * video conferencing * distance learning

Previous Methods
3D R
otat
ion
Mov
ing
peop
lein
bac
kgro
und
Skin color:
N ?
Background subtraction:
Y N
Template:
N Y
Contour:
Y N

Head Tracking Algorithm
MODEL(x,y)
Ellipse: vertical aspect ratio = 1.2state s = (x,y,)
ellipse in frame t
OUTPUT
Ni
Ni
iI
iMiIc
1
1
)(
))(),(min()(
s
sscolor module
Model
Current
Intersection
Skin Hair
LOCAL SEARCH
gradient module
N
iNg ii1
1 |)()(|)( sgns
gradientellipse normal
ellipse in
frame t
INPUT
frame t-1

Evaluation of Head Tracker
1. Tracks head in real time on standard hardware
2. Insensitive to - full 360-degree out-of-plane rotation - arbitrary camera movement (including zoom) - multiple moving people - severe but brief occlusion - hair/skin color, hair length, facial hair, glasses

Headtracker Video

Finding and Using Discontinuities
Depth discontinuities from stereo
Maximum flow for stereo and motion
Motion discontinuities from a sequence
Using discontinuities to track heads

Contributions• Precise, unified definitions and relationship• Pixel-to-pixel stereo algorithm [ICCV 1998]
– good results on difficult images• intensity variation constraint
• dissimilarity measure [PAMI 1998]• preserving slant
– fast (pruning search nodes, postprocessor)
• Motion discontinuities(sparse features, image strain, grouping algorithm)
• Maximum flow techniques(edge weights for global algorithm, smoothness, left border ; applied to motion)
• Elliptical head tracker [Asilomar 1997, CVPR 1998]
– advanced state of the art by tracking people undergoing 3D rotation in front of a dynamic background


Appendix: Extra slides

Comparison of Our Algorithm with Maxflow
Ouralgorithm
Localmaxflow
algorithm

Depth Discontinuity
• Proposition 1: A depth discontinuity is a point in the image plane whose projection ray grazes a surface in the world.
object
image plane
focal pointDepth discontinuities

Definition of Jump
• The jump of a discontinuity is the smallest >0 such that there is a >0 for which, if ||x-x0||<, then |f(x)-f(x0)| >
x
f(x)
x0
jump

Comparison with Intensity Edges
Original image Intensity edges Depth discontinuities
•More closely tied to actual object boundaries•Not distracted by
•change in albedo (reflectance)•change in lighting (e.g., shadows)

Comparison with Layers
Original image Motion discontinuities

Comparison with Segmentation
A plausiblesegmentation
Depthdiscontinuities
Original image
•Well-defined (not task-dependent)•Curves are not necessarily closed

Epipolar Constraint
Left camera Right camera
world point
center ofprojection
epipolarplane
epipolarline

Comparison of Dissimilarity Measure with Other Methods
absolutedifference
our measure
spurious matches
subpixelresolution
0 20 40 60 80 100
seconds
Computing time

Propagating Information Between Scanlines
• Calculate reliabilities & threshold Disparities: [ 4 4 4 4 4 7 7 7 2 ]T
Reliabilities: [ 5 5 5 5 5 3 3 3 1 ]T
unreliable < reliable < very reliable
• Propagate very reliable when– neighbor unreliable, OR
– disparity(neighbor) > disparity(pixel) + 2
• Repeat in x-direction
Fast (30% increase instead of 800%)

Features on Freethrow

Maximum Flow
• Finds greatest shipping rate from source to sink w/o violating capacity constraints
• Flow network G=(V,E) is directed graph with edge capacities c(u,v) > 0, source s, and sink t
• Flow f:E R
• Value of flow |f| = f(s,v)
• Find f* = arg max |f|
• Cut (S,T) is partition of V s.t. s in S and t in T
• capacity of cut c(S,T)
• Max-flow min-cut theorem:There exists a cut (S,T) s.t. |f*| = c(S,T)

Blowup of Meter
Global algorithm Local algorithm

Maximum Flow and Occlusion
[from University of Tsukuba, Japan]

Maximum Flow and Left Image Border