desenvolvimento de um protótipo e de metodologias de...
TRANSCRIPT

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 11
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Discente:Marcelo Roberto Petry
Orientador: Professor Doutor Luís Paulo ReisCo-orientador: Mestre Rodrigo Antônio Marques Braga
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 22
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Sumário Objecivos
Arquitectura de Hardware
Arquitectura de Software
Controlo
Testes
Conclusões
Trabalhos Futuros
M2

Slide 2
M2 Marcelo; 20-02-2008
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 33
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
ObjectivosEstudo e construção de um protótipo de Cadeira de RodasInteligente (CRI):
Desenvolvimento de um sistema de hardware flexível;
Projecto de um software que sirva como plataforma com três modos de operação: real, simulado e realidade aumentada;
Implementação de metodologias de controlo de baixo nível;
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
M1
Slide 3
M1 Marcelo; 20-02-2008
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 44
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
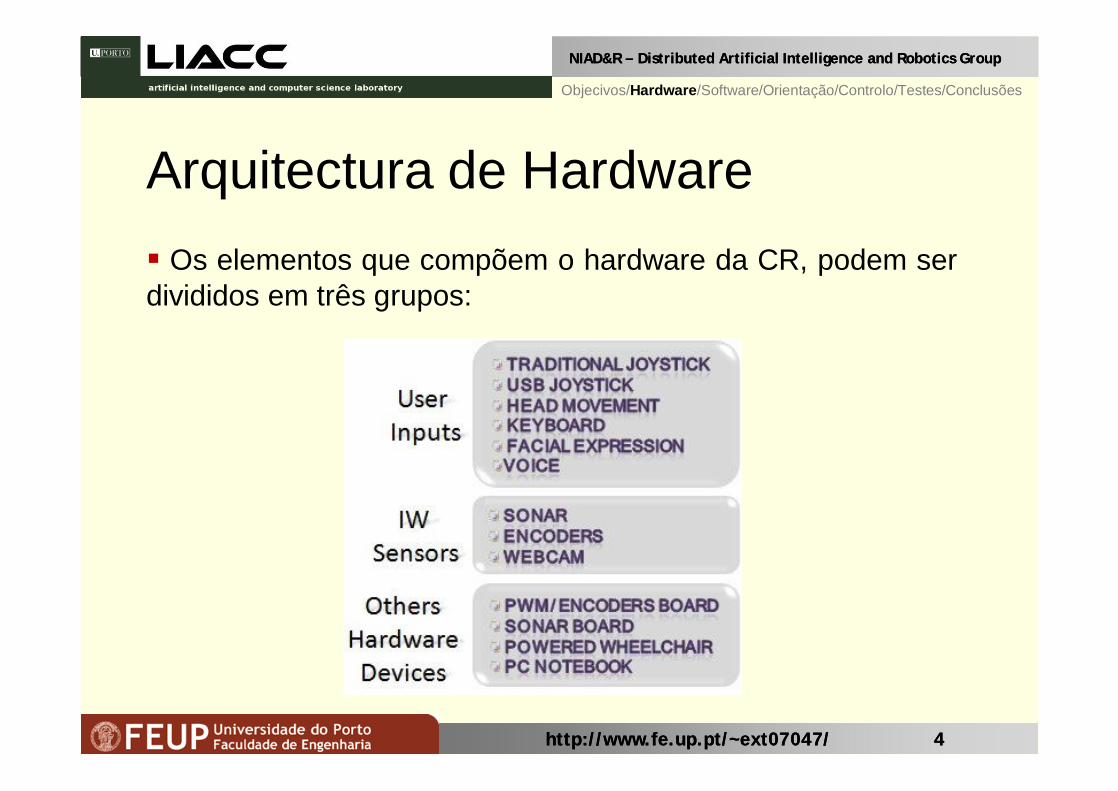
Arquitectura de Hardware Os elementos que compõem o hardware da CR, podem serdivididos em três grupos:
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 55
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Modelo Powertec [Sunrise];
Tracção diferencial traseira;
Duas rodas tolas frontais;
Duas baterias de 12V;
Joystick analógico tradicional;
Módulo de potência;
Arquitectura de HardwareCaracterísticas da cadeira de rodas eléctrica utilizado noprotótipo:
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 66
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Arquitectura de Hardware
Placas de interface conectadas aossonares e aos encoders;
Comunicação serial entre placas deinterface e o computador portátil;
Ligação USB e Bluetooth entre osinputs e o computador portátil;
Sinal de controlo modulado por PWM
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 77
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Arquitectura de HardwareEvolução do hardware do Protótipo desenvolvido no projecto:
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 88
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
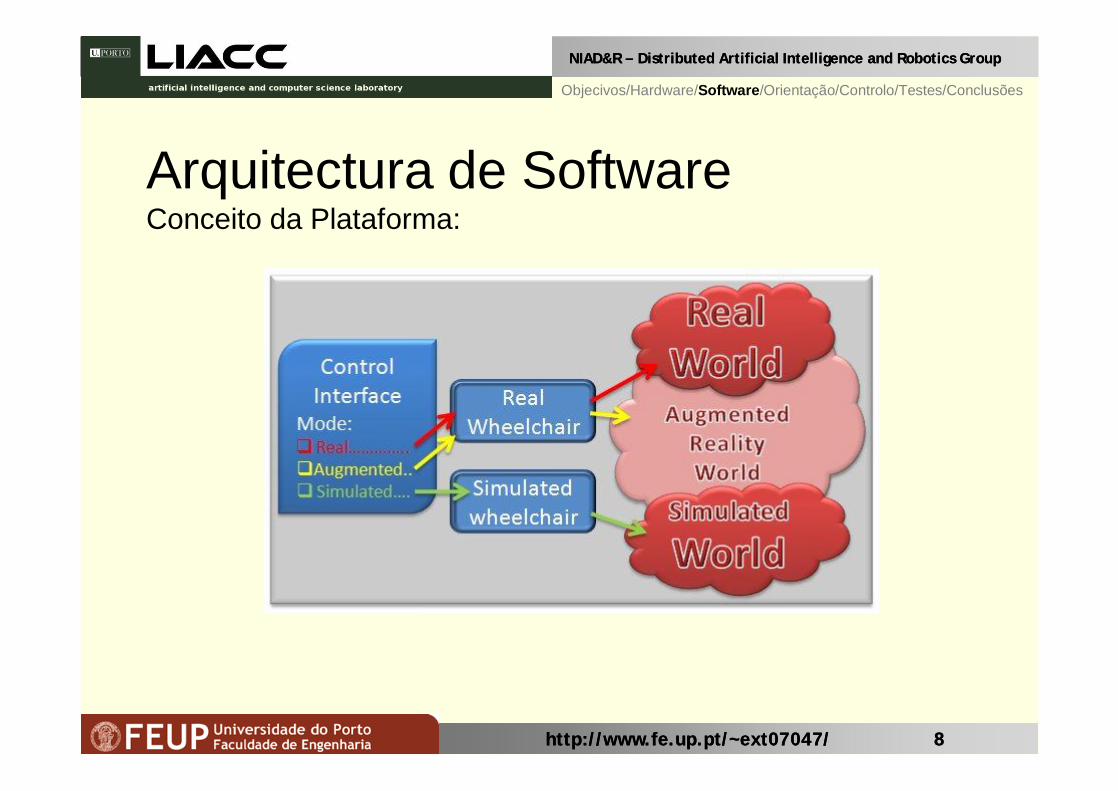
Arquitectura de SoftwareConceito da Plataforma:
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 99
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Controlo
Visão
Sonar
Hodometria
Joystick
TecladoVirtual
VozMovimentos com acabeçaExpressões
faciais
Arquitectura de SoftwareObjecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1010
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
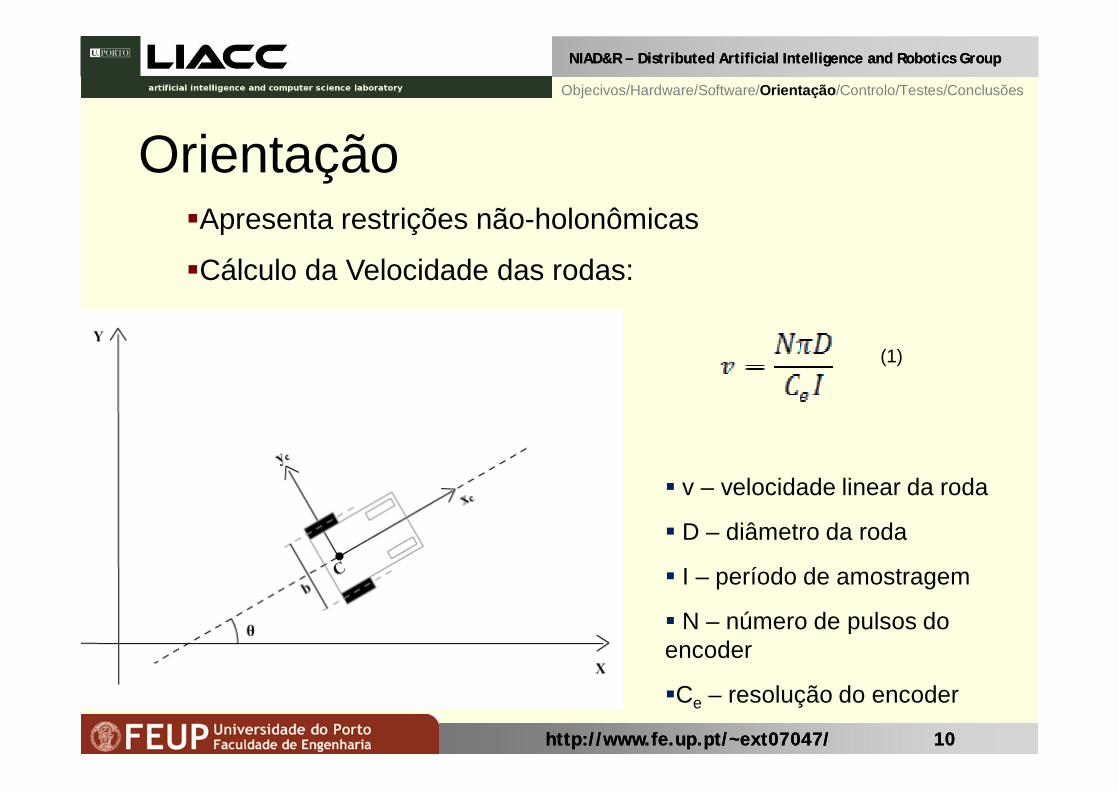
OrientaçãoApresenta restrições não-holonômicas
Cálculo da Velocidade das rodas:
v – velocidade linear da roda
D – diâmetro da roda
I – período de amostragem
N – número de pulsos do encoder
Ce – resolução do encoder
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
(1)
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1111
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
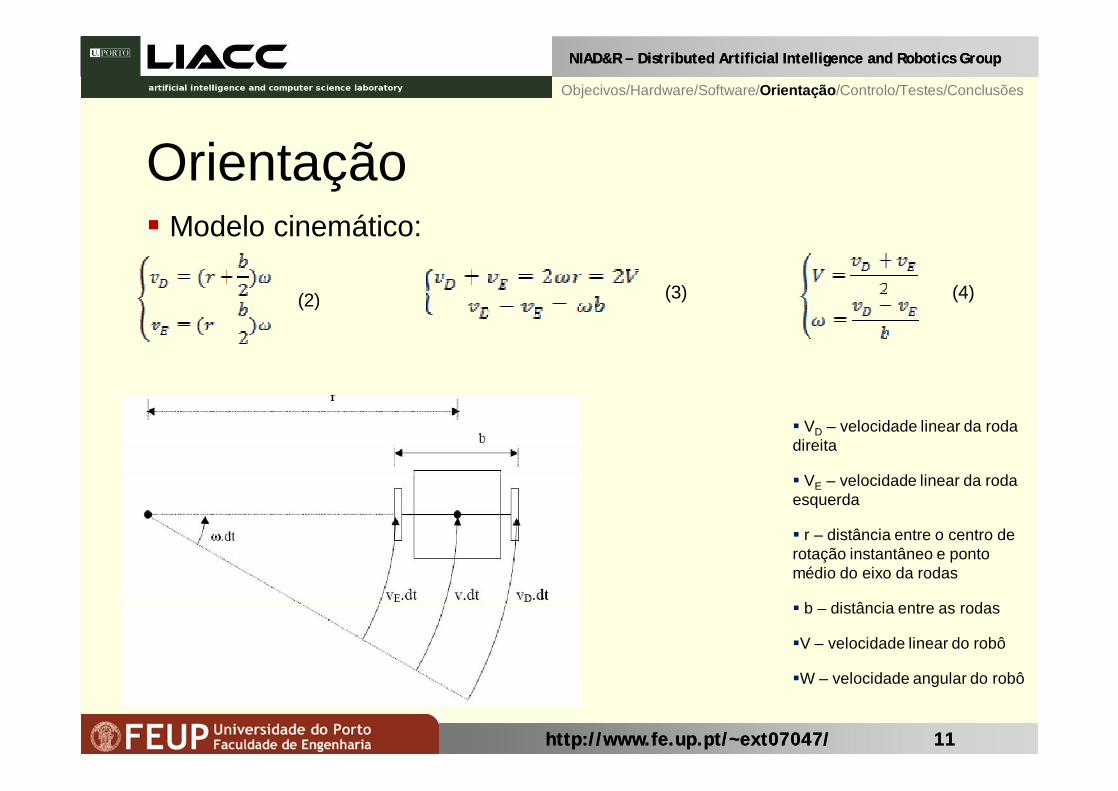
Orientação Modelo cinemático:
VD – velocidade linear da roda direita
VE – velocidade linear da roda esquerda
r – distância entre o centro de rotação instantâneo e ponto médio do eixo da rodas
b – distância entre as rodas
V – velocidade linear do robô
W – velocidade angular do robô
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
(2) (3) (4)

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1212
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Orientação Modelo cinemático:
V – velocidade linear dado robô
w – velocidade angular
Theta – ângulo de orientação em relação ao referencial fixo
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
(5)
(6)

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1313
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
ControloForam implementados 4 algoritmos:
Controlo por seguimento de rectas
Controlo por seguimento de pontos
Controlo por seguimento de ângulo
Controlo por seguimento de paredes
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1414
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Sendo a trajectória objectivo R definida por doispontos A e B de forma que :
Controlo por seguimento de recta
k1 e k2 – ganhos de ajuste P – Projecção de C sobre R ey – distância de C à recta ep – distância entre P e B vn – velocidade nominal
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
(7)
(8)
(9)
(10)

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1515
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Controlo por seguimento de ponto
A trajectória R é recalculada a cada ciclo, sendo definida peloponto C a pelo ponto objectivo B.
erro ey =0
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
(11)
(12)
(13)

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1616
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Controlo por seguimento de ângulo
Por se tratar de um movimento puramente ângular a velocidadelinear V do móvel é nula.
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
(14)
(15)
(16)

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1717
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Controlo por seguimento de paredes
Não utiliza a posição x,y do robô no cálculo do controlo
dR – distância de referência
SonarF – medida de distância do sonar dianteiro
SonarB – medida de distância do sonar traseiro
eF – diferença entre o valor de referência e o medida
ed - diferença entre a medida dianteira e traseira
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
(17)
(19)
(18)
(20)

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1818
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Teste dos sonares Avaliadas medidas a 6 objectos deformas e materiais distintos
Posicionamento sobre marcaçõesresultantes da combinação de distancia[15 cm, 30 cm, 45cm e 60 cm] e ângulos[0º,15º,30º , 45º e 60º].
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 1919
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Interpolação dos resultados apartir de uma curva de ajuste:
O limite angular de detecção dos objectos entre 45º e 60º.
Melhora da precisão para distâncias superiores a 30 cm.
Teste dos sonaresObjecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2020
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
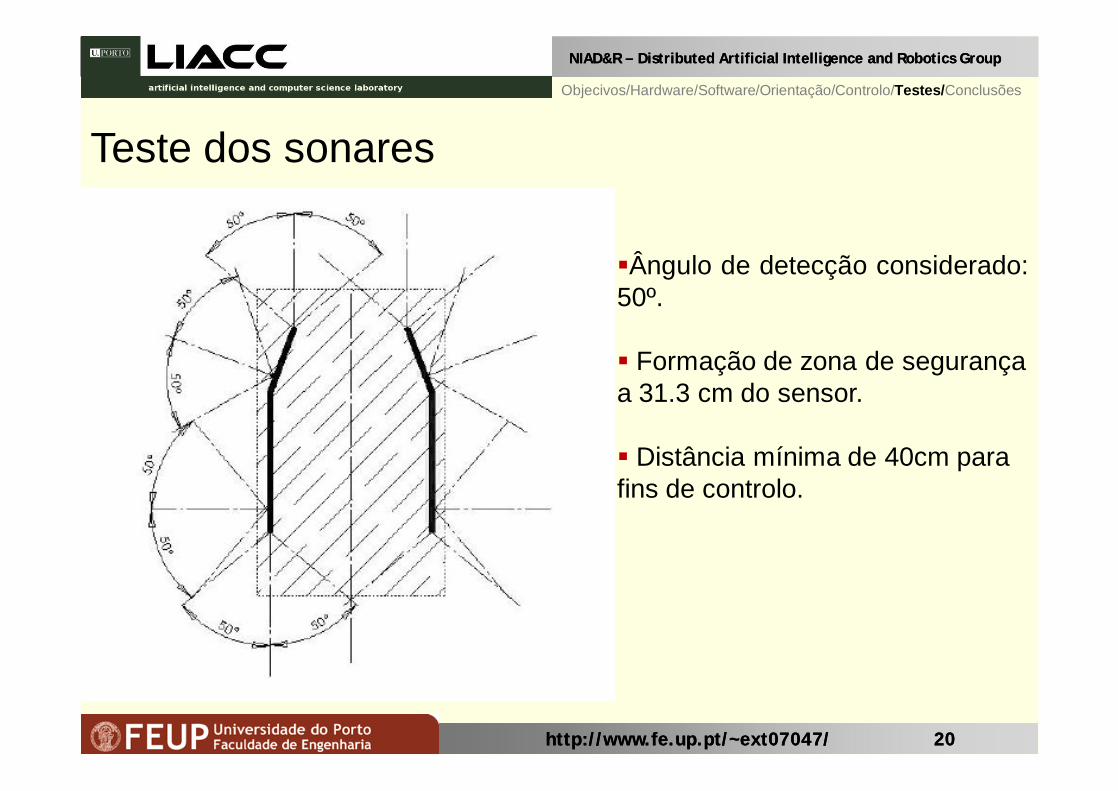
Ângulo de detecção considerado:50º.
Formação de zona de segurança a 31.3 cm do sensor.
Distância mínima de 40cm para fins de controlo.
Teste dos sonaresObjecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2121
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
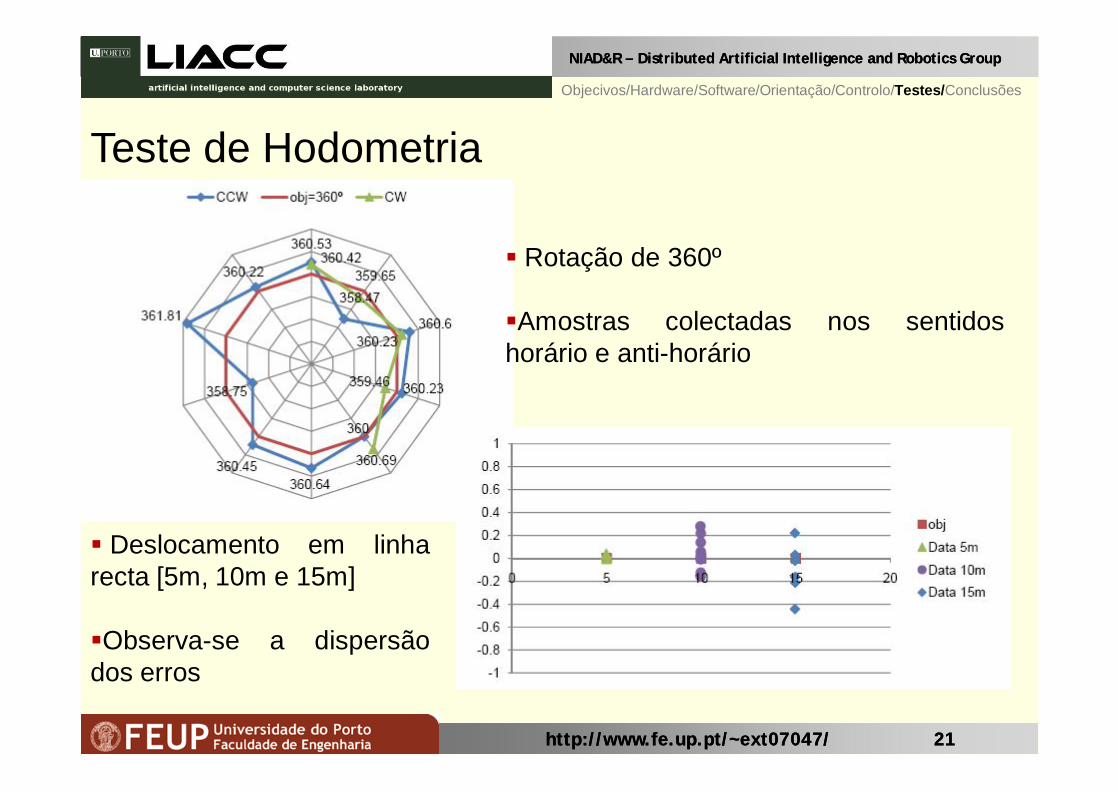
Teste de Hodometria
Rotação de 360º
Amostras colectadas nos sentidoshorário e anti-horário
Deslocamento em linharecta [5m, 10m e 15m]
Observa-se a dispersãodos erros
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2222
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Teste de Hodometria
Deslocamento através de umatrajectória rectangular deaproximandamente 4.00 m x 4.25m
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2323
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Teste de Controlo
Deslocamento em linha recta[5m, 10m]
Critério de paragem: ± 2cm
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2424
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Teste da Controlo
Rotação de 360º
Critério de paragem: ± 1º
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2525
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Conclusões
Neste trabalho foi apresentado um estudo sobre cadeiras de rodasinteligentes, fundamentação teórica e implementação de um protótipo.
Foi desenvolvida uma arquitectura de hardware que abrange autilização de sensores de ultra-som, encoders, câmara digital de vídeo,placas electrónicas de interface e um computador portátil.
Foi desenvolvida uma plataforma contendo aplicativos interpretadoresde comandos do utilizador, aquisição dos dados dos sensores e controlodo protótipo de uma CRI.
Foram discutidos e implementadas algumas forma de controlo porrealimentação parcial de estados, e formas de controlo directo atravésdas medidas dos sensores.
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões
http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2626
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Trabalhos futuros
Avaliar a implementação de controladores do tipo PID.
Desenvolvimento de um sistema de navegação assistida através de mapas locais do ambiente.
Implementação de métodos de correcção dos erros sistemáticos de hodometria.
Implementação de métodos autónomos de correcção de hodometria, além de métodos estatísticos da dispersão da posição da cadeira.
Finalizar o trabalho de comunicação do aplicativo principal com o simulador.
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2727
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Demonstração de funcionamento

http://www.fe.up.pt/~ext07047/http://www.fe.up.pt/~ext07047/ 2828
NIAD&R NIAD&R –– Distributed Artificial Intelligence and Robotics GroupDistributed Artificial Intelligence and Robotics Group
Dúvidas
Página web: www.fe.up.pt/~ext07047/
Apresentação : www.fe.up.pt/~ext07047/apresentacao.rar
Dissertação : www.fe.up.pt/~ext07047/dissertacao.pdf
Objecivos/Hardware/Software/Orientação/Controlo/Testes/Conclusões