design of laterally unrestrained flexural members
TRANSCRIPT

Design of Laterally Unrestrained Flexural
Members
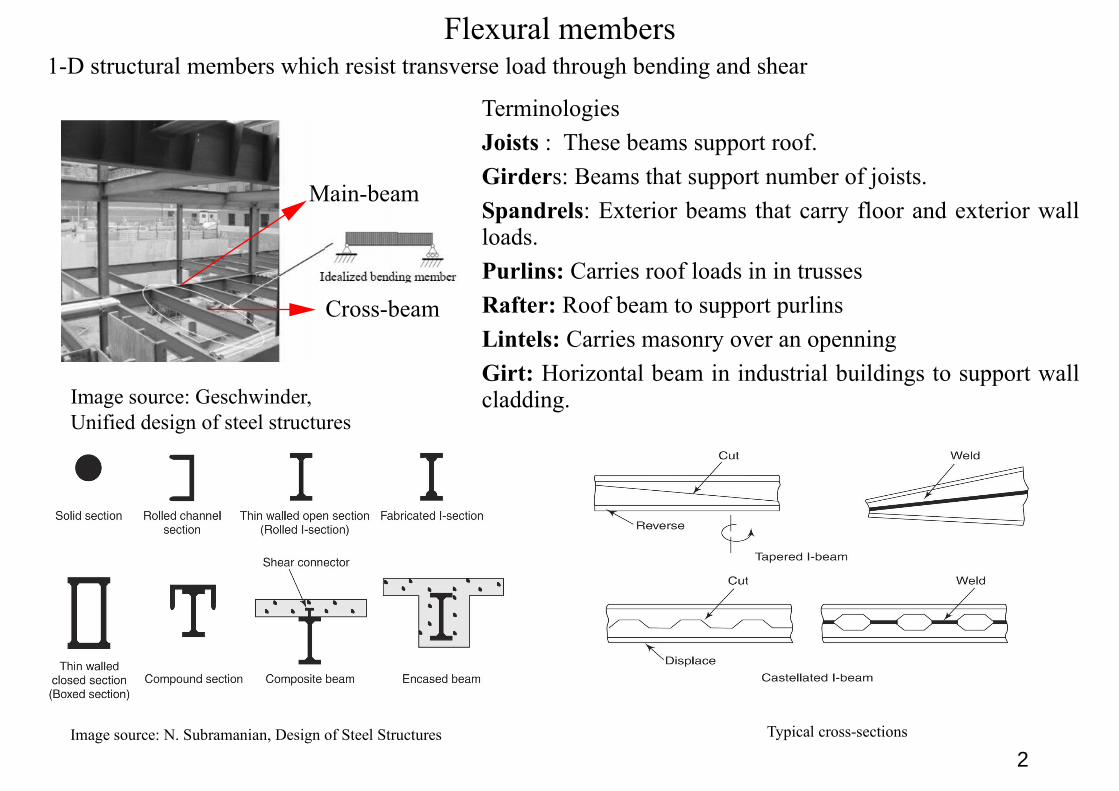
Flexural members1-D structural members which resist transverse load through bending and shear
Image source: N. Subramanian, Design of Steel Structures
2
Image source: Geschwinder, Unified design of steel structures
Terminologies
Joists : These beams support roof.
Girders: Beams that support number of joists.
Spandrels: Exterior beams that carry floor and exterior wall loads.
Purlins: Carries roof loads in in trusses
Rafter: Roof beam to support purlins
Lintels: Carries masonry over an openning
Girt: Horizontal beam in industrial buildings to support wall cladding.
Typical cross-sections
Cross-beam
Main-beam

Single Structural ShapesRolled sections (IS808 & IS1173)
Section ClassificationAbbreviated symbol
Column section ISSC SC
Wide Parallel Flange Beams/Columns ISWPB WPB
Angles ISA
Medium weight channels ISMC MC
Light weight channels ISLC LC
Medium weight channels ISMC MC
Medium weight parallel flange channels ISMCP MCP
Rolled normal T bars ISNT NT
Rolled deep legged T bars ISDT DT
Light weight T bars ISLT LT
Slit medium weight T bars ISMT MT
Slit T bars from H-sections ISHT HT
Parallel flange section (IS12778)
3
IChannel
Angle
Tee

Lateral Torsional Buckling
4
Lateral torsional buckling of a cantilever beam, Trahair and Bradford, Design of Steel Structures to EC3
EI yd2w '
dx2=−M zϕ
GI tdϕdx
−E Iwd3ϕdx3
=M zdw 'dx
End moment :M z
y’
z’
x’
Lateral torsional buckling of simply supported beam, Engineering Structures, 187 (2019), 329-340
y’ , v’ x’
z’ , w’EI z
d2 v '
dx2=−M z
I t : St .Venant 's Torsion constant
I w :Warping torsion constant

Torsion in Thin-Walled Member
5
Warping of an I beamAlexander Chajes, Principles of Structural
Stability
z
x
ϕ
z
T=GI tdϕdx
−E Iwd3ϕdx3
Warping torsion
St. Venant torsion
Effect of torsion on an I-beam Boresi, Advanced Mechanics of Materials
If warping is prevented warping torsion arises

St. Venant’s Torsion Constants
6
y
z
I t=13(b t 2− t 3
4 )≈ bt2
3
Torsion of a rectangular and open section, Trahair and Bradford, Design of Steel Structures to EC3
I t=∑i
n
I ti=∑
i
n bi t i2
3
Thin-walled open section
Clause 8.2.2.1App E1-2b
Rectangular strip Thin-walled closed section
I t=4 A 2
∮S
dst
Clause 8.2.2.1App E1-2b
S: perimeter of the c/s along the centreline

Warping Torsion Constant
7
ω B (s)=∫0
s
rB(s) .TB(s)ds
Warping functionP
B
z
y
rB(s)
TB (s)
sI w=∫
0
A
ω B2 (s)dA
Warping torsion constant
As per IS800, E-1.2b
For I−sectionsmonosymmetric about theweak axis(local axis y ) , Iw=(1−β f )β f I y hy2
For angle, Tee, narrow rectangular sections, and for hollow sections, Iw = 0
hy: distance between shear centre of the two flanges of the cross-section
β f=I fc
I fc+ I ft
where, Ifc and Ift are the moment of inertia of the compression and tension flanges, respectively, about the minor axis of the entire section

Lateral Torsional Buckling (LTB) of I-beam Under Pure Bending
8
EI yd2w '
dx2=−M crϕ
GI tdϕdx
−E Iwd3ϕdx3
=M crdw 'dx
Assume ,w '=Δ sinπ xL
,ϕ=θ sinπ xL
BC:w '|x=0=0 ,and w '|x=L=0 ,Atends , no transversedeflection
BC: ϕ|x=0=0 ,and ϕ|x=L=0 ,At ends ,no twisting
BC:d2ϕdx2 |
x=0
=0 ,andd2ϕdx2 |
x=L
=0 ,At ends , sections can warp
EI zd2 v '
dx2=−M cr
L
M cr M cr
I t : St .Venant 's Torsion constant
I t :Warping torsion constant
Governing equation for buckling Boundary conditions
BC: v '|x=0=0 ,and v '|x=L=0 ,At ends , no vertical deflection
BC:M|x=0=M cr ,and M|x=L=M cr ,At ends ,M=M cr
M cr=√ π 2E I y
L2 [G I t+π 2E Iw
L2 ]For different boundary conditions L is replaced by LLT (Clause 8.3)
For different loading conditions refer to Appendix E

Lateral Torsional Buckling (LTB) of a Real Beam
9
Image source: Subramaniyan
❑ The critical moment is affected by geometric imperfection
❑ Inelasticity

AISC procedure
Image source: Geschwinder, Unified design of Steel Structures

Eurocode Procedure
Compression
Flexure
IS 800, adopts the Eurocode Procedure

Lateral Torsional Buckling with Imperfection
12
EI yd2w '
dx2=−M 0(ϕ +ϕ 0)
GI tdϕdx
−EΓ d3ϕdx3
=M 0(dw 'dx
+dw ' 0dx )
Lateral torsional buckling of simply supported beam, Engineering Structures, 187 (2019), 329-340
y’ , v’ x’
z’ , w’EI z
d2 v '
dx2=−M 0
BC:w '|x=0=0 ,and w '|x=L=0 ,At ends , no transverse deflection
BC: ϕ|x=0=0 ,and ϕ|x=L=0 ,At ends ,no twisting
BC:d2ϕdx2 |
x=0
=0 ,andd2ϕdx2 |
x=L
=0 ,At ends , sections can warp
BC: v '|x=0=0 ,and v '|x=L=0 ,At ends , no vertical deflection
BC:M|x=0=M cr ,and M|x=L=M cr ,At ends ,M=M 0
Assume ,w '=Δ sinπ xL
,ϕ=θ sinπ xL
,w '0=Δ0 sinπ xL
,ϕ 0=θ 0sinπ xL

13
−M 0 (Δ+Δ0 )+(G I t+π 2E Iw
L2 )θ =⇒−M 0(Δ+Δ0)+r02Pcrxθ =0
Derivation Continues
−π 2E I y
L2 Δ+M 0(θ +θ 0)=0⇒−PcryΔ+M 0 (θ +θ 0)=0
[ Pcry −M 0
−M 0 r02Pcrx
]{Δθ }=[ 0 M 0
M 0 0 ]{Δ0
θ 0}
Polar radius of gyration , r0=√∫A r2dA
A
{Δθ }=[ Pcry −M 0
−M 0 r02Pcrx
]−1
[ 0 M 0
M 0 0 ]{Δ0
θ 0}
ΔT=Δ+Δ0=M cr
2 Δ0+r02 Pcrx M 0θ 0
M cr2 −M 0
2θ T=θ +θ 0=
M 0PcryΔ0+M cr2 θ 0
M cr2 −M 0
2
limM 0→M cr
ΔT
θ T=
M cr
Pcry
As the moment approaches the elastic critical moment the ratio of total deformation amplitudes remains constant
Derivation follows Journal of Constructional Steel Research 66 (2010) 670–679

14
Derivation Continues (Ratio of total deformation with given imperfection)
Let us assume the first buckling mode gives the shape of imperfection for any M0
Δ0
θ 0=
M cr
PcryThen,
ΔT
θ T=
M cr2 Δ0+r0
2PcrxM 0θ 0
M 0Pcry Δ0+M cr2 θ 0
⇒M cr
2 Δ0+r02 Pcrx M 0
Δ0Pcry
M cr
M 0Pcry Δ0+M cr2 Δ0
Pcry
M cr
=M cr
Pcry
If we assume the ratio of imperfection amplitudes follows as the ratio of first buckling modeshapes the ratio of total deformations remains constant (same as what we saw in the previous slide)
ΔT=M cr
2 Δ0+r02PcrxM 0
Pcry
M cr
Δ0
M cr2 −M 0
2=
M cr (M cr+M 0)Δ0
M cr2 −M 0
2=
M cr
M cr−M 0
Δ0
θ T=θ +θ 0=M 0PcryΔ0+M cr
2 θ 0
M cr2 −M 0
2
ΔT=Δ+Δ0=M cr
2 Δ0+r02 Pcrx M 0θ 0
M cr2 −M 0
2
θ T=M 0Pcry
M cr
Pcry
θ 0+M cr2 θ 0
M cr2 −M 0
2=
M cr
M cr−M 0
θ 0
Assumed imperfect shape gives linear and consistent amplification.

Derivation (Manipulation) Continues
17
θ =−M 0θ 0
M 0−M cr
=−M 0Δ0Pcry
M cr (M 0−M cr)Δ=
M 0Δ0
M 0−M cr
f max=f y=M 0
Z ez
−E I y
Z eyf( d2
dx2 [v ' ( x)− ymaxϕ (x)])x= L2
M y=M 0−M 0M cr
M 0−M cr
η
M y (M 0−M cr)=M 0(M 0−M cr)−η M 0M cr
M 02−(M y+M cr+η M cr )M 0+M y M cr=0
If the maximum moment is within the elastic limit
Δ0
π 2E I y
L2 =M crθ 0⇒Pcry Δ0=M crθ 0
M 0=(1+η)M cr+M y−√[(1+η)M cr+M y ]
2−4M y M cr
2
M y=M 0+Pcry Z ez
Zeyf
M 0Δ0
M 0−M cr[1+ ymax Pcry
M cr] Let ,η≝−
Pcry Z ez
Z eyf f cr
Δ0[1+ ymax Pcry
M cr]
Define
√ M y
M cr
=λ̄ , ϕ̄ =(1+η)M cr+M y
2=1+η+λ̄2
2M cr=ϕ M cr
M 0=ϕ̄−√ϕ̄ 2−M crM y=M cr M y
ϕ̄ +√ϕ̄ 2−M cr M y
=M y
ϕ +√ϕ 2−λ̄2
η is chosen negative as M0 will be lesser than Mcr
Zeyf is the elastic section modulus of the flange about the minor axis of the cross-section
Most important assumption in the derivation

Final Form of Moment Carrying Capacity
18
M 0=ϕ̄−√ϕ̄ 2−M crM y=M cr M y
ϕ̄ +√ϕ̄ 2−M cr M y
=M y
ϕ +√ϕ 2−λ̄2
Similar to what we had in Perry Robertson’s formula for column buckling.
M 0=M y
ϕ +√ϕ 2−λ̄2⇒
M 0
Z ez
=
M y
Z ez
ϕ +√ϕ 2−λ̄ 2⇒ f=
f y
ϕ +√ϕ 2−λ̄ 2
√ M y
M cr
=λ̄ ,ϕ =1+η+λ̄ 2
2
Similar to what we had in Perry Robertson’s formula for column buckling. The above formula gives us the permissible stress f so that the member stays within the elastic limit.
M cr=√ π 2E I y
L2 [G I t+π 2E Iw
L2 ]

Derivation (Manipulation) Continues
19
θ =−M 0θ 0
M 0−M cr
=−M 0Δ0Pcry
M cr (M 0−M cr)Δ=
M 0Δ0
M 0−M cr
f max=f y=M 0
Z ez
−E I y
Z eyf( d2
dx2 [v ' ( x)− ymaxϕ (x)])x= L2
M y=M 0−M 0M cr
M 0−M cr
η
M y (M 0−M cr)=M 0(M 0−M cr)−η M 0M cr
M 02−(M y+M cr+η M cr )M 0+M y M cr=0
If the maximum moment is within the elastic limit
Δ0
π 2E I y
L2 =M crθ 0⇒Pcry Δ0=M crθ 0
M 0=(1+η)M cr+M y−√[(1+η)M cr+M y ]
2−4M y M cr
2
M y=M 0+Pcry Z ez
Zeyf
M 0Δ0
M 0−M cr[1+ ymax Pcry
M cr] Let ,η≝−
Pcry Z ez
Z eyf f cr
Δ0[1+ ymax Pcry
M cr]
Define
√ M y
M cr
=λ̄ , ϕ̄ =(1+η)M cr+M y
2=1+η+λ̄2
2M cr=ϕ M cr
M 0=ϕ̄−√ϕ̄ 2−M crM y=M cr M y
ϕ̄ +√ϕ̄ 2−M cr M y
=M y
ϕ +√ϕ 2−λ̄2
η is chosen negative as M0 will be lesser than Mcr
Zeyf is the elastic section modulus of the flange about the minor axis of the cross-section
Most important assumption in the derivation

IS800 Procedure (Clause 8.2.2)
20
IS800, somehow extends the elastic lateral torsional buckling formula with imperfection to inelastic lateral torsional buckling but the derivation is not clear
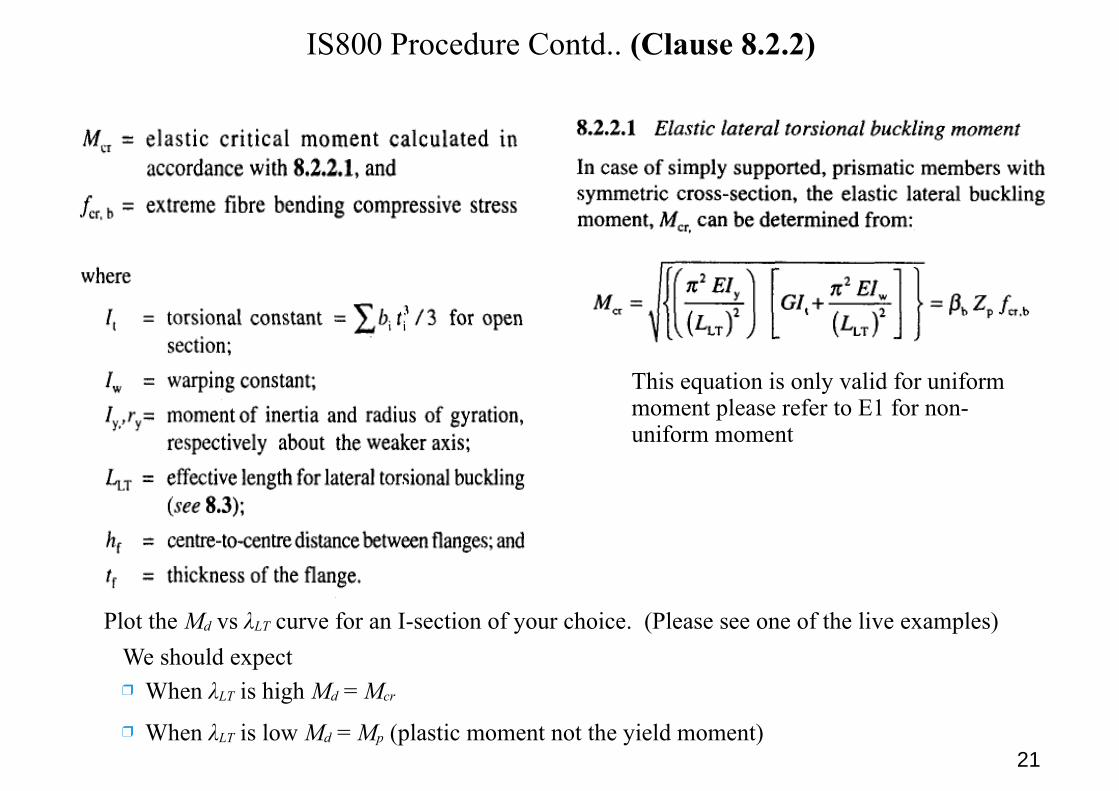
IS800 Procedure Contd.. (Clause 8.2.2)
21
This equation is only valid for uniform moment please refer to E1 for non-uniform moment
Plot the Md vs λLT curve for an I-section of your choice. (Please see one of the live examples)
We should expect When λLT is high Md = Mcr
When λLT is low Md = Mp (plastic moment not the yield moment)

When to Ignore LTB Check?
22

LLT For Simply Supported Beam (Clause 8.3)
23
Clause (8.3.1, amended version)
In simply supported beams with intermediate lateral restraint against LTB the effective length for LTB, LLT to be used in 8.2.2.1 shall be taken as the length of relevant segment between lateral restraints. In the case of intermediate partial lateral restraints the effective length shall be 1.2 length of the relevant segment in between the partial lateral restraints
partially
When the load is on the top flange, the compression in flange and the load acting together creates a destabilizing condition. Why?
P
P
Normal
Destabilizing

LLT For Cantilever Beam (Clause 8.3.1)
24
For cantilever, LLT = projected length of the cantilever, see Table 16

Design of Intermediate Lateral Restraint
25
For beams, where members are provided for effective lateral restraint
❑ Determine the maximum total force FC in the compression flange
❑ Select the number of lateral restraint
❑ Estimate the maximum force in support, F = Max(0.025*FC/n, 0.01*FC)
❑ Design the lateral support to resist F

LTB With Different Force and Displacement Boundary Conditions (E-1.2)
26
M cr=c1π 2E I y
LLT2 {[( K
Kw)2 Iw
I y
+G I t (LLT)2
π 2E I y
+(c2 y g−c3 y j)2]
0.5
−(c2 y g−c3 y j)}

LTB With Different Loading Conditions (Table 42, E-1.2)
27

LTB With Different Support Conditions (Table 42, E-1.2)
28