designing artificial companionship through explorative research in order to prevent loneliness in...
TRANSCRIPT

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 1/130
N a t a l i a P a p a d o p o u l o u
Buddy
*
)
|
* the phenomenon of seeing faces, where there are no faces, is called pareidolia and is part of evoking companionship

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 2/130
Supervisors:
S t e l l a B o e s s
R o b e r t P a a u w e
H a n s T a n g e ld e r
N a t a l i a P a p a d o p o u l o u
August 2014
Master Graduation Project
M.Sc. Design For Interaction
Medisign Specialization
Buddy

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 3/130
It has been a challenging and truly participatory project that wouldn’t have been completed without
the contribution of some people (direct or indirect).
First of all I would like to thank Robert, my mentor, for always being available for an interestingconversation on artificial compan ions and, most important of all, for shaping up my vision on the
future of (designing) them. Also, to Stella, my chai r, that granted me complete methodological
freedom and control over the project, and for her unique ability to give me a gentle push when I
needed it here and there along the way.
Secondly, a thank you wouldn’t be enough for all the students and friends that participated in my
workshops, explorations and evaluation tests throughout the project. Special thanks to Iliana and
Nikos for being my disruptive to my thesis-routine neighbors and so loyal ‘lab-rats’. When I thought
there was no hope of finding older participants in the Netherlands I found Grigoris and Yvonne and
that was the most rewarding and thought-provoking feedback I ever had on a user-test.
Thirdly, thanks to Alex, for baring with me through another graduation project. Luckily the score will
soon be 2-2 to return the help ;) I couldn’t get away without thanking my parents for never
complain ing for not having seen me for one year and for always being busy during this master.
Lastly, this master wouldn’t have been viable for me without my scholarship, so this should end with a
few typicalities: This graduation project has been completed as par t of the postgraduate programme financed by
the Act "Scholarships programme SSF (State Scholarships Foundation of Greece, I.K.Y.) with an
individualised assessment process of the Academic Year 2011-2012" from resources of the
Business Programme "Education and Lifelong Learning", of the European Social Fund (ESF), the
NSRF 2007-2013
Prologue
(Is it?)

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 4/130
Contents
Analyze Envision Ideate Validate Reflect
Append
The buddy project
Introduce
Robots
Humans
The Context
7
18
41
47
Companionship 52
References
Questionnaire
Ideation, Rejected
Aging Stories
110
121
123
126
I II III IV VI
91The ConceptBuddy Considerations77 104

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 5/130
5
A robot may not injure a human
being, or, through inaction, allow
a human being to come to harm.
A robot must obey the orders
given it by human beings except
where such orders would
conflict with the First Law.
A robot must protect its own
existence as long as such
protection does not conflict with
the First or Second Law.
From that time till today, robots do live
among us, and they are actually many
in numbers, and various in shapes and
functionalities. We are just entering an
era when socially savvy robots could
unlock new possibilities to help people,
beyond serving them on a practical
level, potentially transforming society as
we know it today. However co-existence
is not smooth, yet, as researchers can
hardly articulate those three laws
further, when it comes to human-robot
interaction (HRI) grounds.
HRI (explanations, citations, further
analysis, and definitions -if possible!-
will follow later on) is a relatively new
field that emerged during the early
1990s, a ‘synthetic ’ one, that attracts
people from engineering to ethology.
The involvement of designers to the
field of HRI counts even less years. If
designing, in general, feels like ‘dealing
with uncertainty ’(**) then designing
robots and shaping interactions
between them and people, felt like
‘dealing with moving sand ’. Currently,
despite the many technical definitions,
results and progress, there is little
usable evidence and insufficient,
design-oriented tools to support
designers on such a mission,
methodologically-speaking, at least.
The journey, although intriguing for a
designer, goes through gaining
understanding of unknown territories,
taking time and distance to digest new
information, adapting known methods,
experimenting with people, then looking
back again. It is not only about building
a conceptual framework to validate your
process, insights, and results, but
mainly about constructing your own
beliefs around that type of products.
Many things that apply to designing any
other product are challenged, not
applicable, or, in worse case scenario,
unexpectedly contradicting to what you
know when attempting to design robots.
Current report is the result of such a
journey. Enjoy reading!
Natalía
Preface “Last night I dreamed”, said LVX-1, calmly.
Once upon a time, Isaac Asimov has not only envisioned but also
thoroughly described, in his ‘Robot Series’ of fiction books, a future
where robots are independently able to dream and think on their own. In
order for humans and robots to peacefully and responsibly co-exist, he
developed three statements, known as ‘the three laws of robotics ’(*):
(*) ‘Runaround’ in Astounding Science Fiction (March 1942); later published in I, Robot (1950).
1.
2.
3.
— From ‘Robot Dreams’, Isaac Asimov (1986).
(**) Delft Design Guide (2010).

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 6/130
Introduce

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 7/130
Chapter Overview
1.1 The assignment, towards an area of focus
1.2 The three drives of human-centered design:
1.2.1 Business
1.2.2 Technology
1.2.3 People
1.3
The aim and initial research questions
1.4 The scope and limitations
1.5 The approach
The ‘buddy project’ is my graduation project and the last requirement
towards the master Design for Interaction, for the Medical Design
(Medisign) track, of Delft University of Technology.
The project was conducted for Vicarious Perception Technologies
(VicarVision), a computer vision company, in Amsterdam. VicarVision is
specializing in developing vicarious perception technologies, having the
vision to grant machines the ability to perceive their environment the way
humans do.
Overall, the project took place in a ‘blue sky’ research-through-design
frame, and serves as additional insights to the company’s interest ininnovation, from a human-centered designer’s approach. It was
originated from the company’s will to find possible future applications of
one of their software solutions, the FaceReader. FaceReader is a tool
that can automatically analyze facial expressions using a camera.
So, the project began with the question:
‘What could FaceReader do, if embedded in a robot ’?
Introduce
The buddy projectSetting the stage on artificial companionship
7
8
8
9
9
12
13
14
15
1.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 8/130
1.
2.
The assignment,
towards an area
of focusAs an open, explorative project, a
specific area of focus was difficult to get
defined and decided. Besides few initial
requests from the company, most of the
decisions that contributed to converge
and frame a working area (I won’t say
‘problem area’, as this project is not
exactly problem-oriented, rather than
opportunity-oriented), were taken when
new insights arose along the process.
From the company side there were only
two ‘requirements’:
FaceReader has to be part of
the final design of a robot.
The target group for the robot
should be older people .
However those, still, leave quite an
undefined area of focus, even to initiate
the project. Drawing from personal
motivation, and experience I gained
from previous medisign projects on the
same field, I decided to set the context
on contributing to emotional and
subjective well-being [J01]. Moreover,
taking into account the fact thatFaceReader itself is related to
emotions, the rationale is that it is most
appropriate to use it for such a cause
(instead of finding applications of it on
any other field; engineering, for
example).
That decision, immediately rules out a
number of different types of robots (see
Chapter 2). We are not talking about
robots that would have some
functionality, like helping elders not to
forget their medication. Nor about robots
that are health-care, service providers,
like helping elders stay connected with
their doctors while at the comfort of their
home. We are talking about seemingly
‘function-less’ robots that just keep
company to elder people. Those kinds
of robots appear in the literature under
many definitions and variation of
terminologies, from sociable robots [B01]
to interactive companions [J02]. They
will be called artificial companions
[J02] as this term best represents the
purposes of this project. Therefore, the
initial focus of a working area is:
Design artificial companionship
for older people.
The three drives
of human
centered designIn fields related to user-centered design
(e.g. user experience, interaction
design, design thinking), it is often being
said that the magic happens at the
intersection of business, technology,
and people [W01]. Which means that
products, that are designed to
contribute to our well-being by giving
us a meaningful user experience
[R01], may be the result of (see Figure 1):
- a business push(because businesses need to evolve
and exploit opportunities or create new
ones)
- a technology push
(because the means that could make
that product feasible were available)
- people-needs (or wants) push
(because, in the end, they will be the
ones that will either accept, like, and,eventually, use the product or not)
8
Introduce
1.1. 1.2.
Business -> Technology -> People... or the other way around.
FIGURE 1 Where user-experience innovation occurs
8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 9/130
This was also the case for the buddy
project. It was initiated with a business/
technology push, so there was an
essential need to balance it with giving
emphasis on the people/interaction
aspect of it. I would actually argue that
by focusing on the human aspect of the
project insights reflect back to the
technology and business level as a
vision of a desirable future (and
therefore indicating the right direction for
development). As a matter of fact, and
as expected to the mindset of a
designer, the human aspect is indeed
the key to this field. Cynthia Breazeal, a
pioneer in the field of sociable robots
and human-robot interaction (HRI),
argued, in the very beginning of her
career, that “technological attempts to
foster human-technology relations will
be accepted by a majority of people if
the technological gadget displays rich
social behavior ” [T01], bringing the
human aspect to the foremost
importance of all.
Sometimes it was difficult to separatethose areas, as I realized countless
times throughout the project, in HRI
everything relates to everything. In
practice that means that if you want to
focus on the people’s aspect, then you
do need to go through the business and
technological state of the art and history.
It is the only way to understand where
you stand at the moment, to begin with.
Business
The opportunities in the field of robotics,
are, now, more than ever. Currently
people with, almost, any background
are working in the development of
robotics: engineers, computer
scientists, psychologists, linguists,
designers, even artists and mime
theater actors [W02].
The pie is big, in terms of money, and
everybody wants a piece of it. Robotics
is considered to be the next ‘disruptive ’
industry that will transform life,
business, and the global economy
[R02]. The emergence of that industry
is similar to the computer ‘invasion’ 30
years ago. The computer innovation is
already at the end of its disruptive
trajectory, and in order to move on the
the next one, computers have to turn
into something much more
autonomous, contextually aware, and
responsive; in other words robots [W03].
Despite the fact that there are already,approximately estimated, 8.6 million
robots in the world, according to the IFR
(International Federation of Robotics), a
‘personal or domestic robots’-share of
the market is just emerging. Bill Gates
has predicted that, soon, every
household will have, at least, one robot.
But the challenges are many for
technology [W03].
Technology
According to Bill Gates [W03], the
challenges the robotics industry faces at
the moment are very similar to those
the computer industry faced three
decades ago; there is nothing
standardized. If a company wants to
make a robot they have to start building
it from scratch. From hardware to
software standardization is limited,
and very few things can be transferred
from one machine to another. However,
the contribution of mobile technologies,
that are currently turning everything into
a potentially ubiquitous system, is alsoinfluencing Robotics, making things a
bit easier to evolve [R02].
Meanwhile, some of the most
challenging problems of robotics,
such as spacial navigation, (visual)
recognition, artificial intelligence (with
whatever that means for a robot), and
machine learning are being tackled
worldwide. It seems, depending on the
optimism of the person you ask, that wewill soon have the technology needed,
to some extend at least, in order to build
the robots we are dreaming of [W03].
The question, that remains, is what kind
of applications will they have, which is
up to the people’s acceptance and
perception (and later on discussed).
VicarVision’s FaceReader
At a micro-level of introducing the
influential parts of this project, it is
essential to present what FaceReader
is currently able to do, as the available
technology for this project.
Facereader is a facial expression
analysis software with two modes of
functionality. It can either analyze faces
appearing in static images, or in
captured video. It does so by modeling
the face assigning 500 key points
following the structure of it. Those key
points can be grouped in order to
annotate important areas that indicate a
change in emotions, such as eyes,
eyebrows, lips. In fact, it creates an
overlaying ‘mask’ of the face that can
keep track of movements in 20
commonly used ‘Action Units’ [W04]:
9
Introduce
1.2.1 1.2.2
Inner Brow Raiser
Outer Brow Raiser
Brow Lowerer
Upper Lid Raiser
Cheek Raiser
Lid Tightener
Nose Wrinkler
Upper Lip Raiser
Lip Corner Puller
Dimpler
Lip Corner Depressor
Chin Raiser
Lip Pucker
Lip Stretcher
Lip Tightener
Lip Pressor
Lips Part
Jaw Drop
Mouth Stretch
Eyes Closed

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 10/130
Using the action units to model the
face, at a front-end level of
functionality , FaceReader [R03] is
able to execute five actions:
Face Detection
The presence of a face, or faces, can
be detected in a scene, separating an
animate existence to a static
background. Face detection, along with
face orientation, eye position, and gaze
detection is a starting point of
accumulating a model of the face that
has all the tracked action units on it.
Face Emotional Classification
When a change is tracked in the
computed mask of the face,
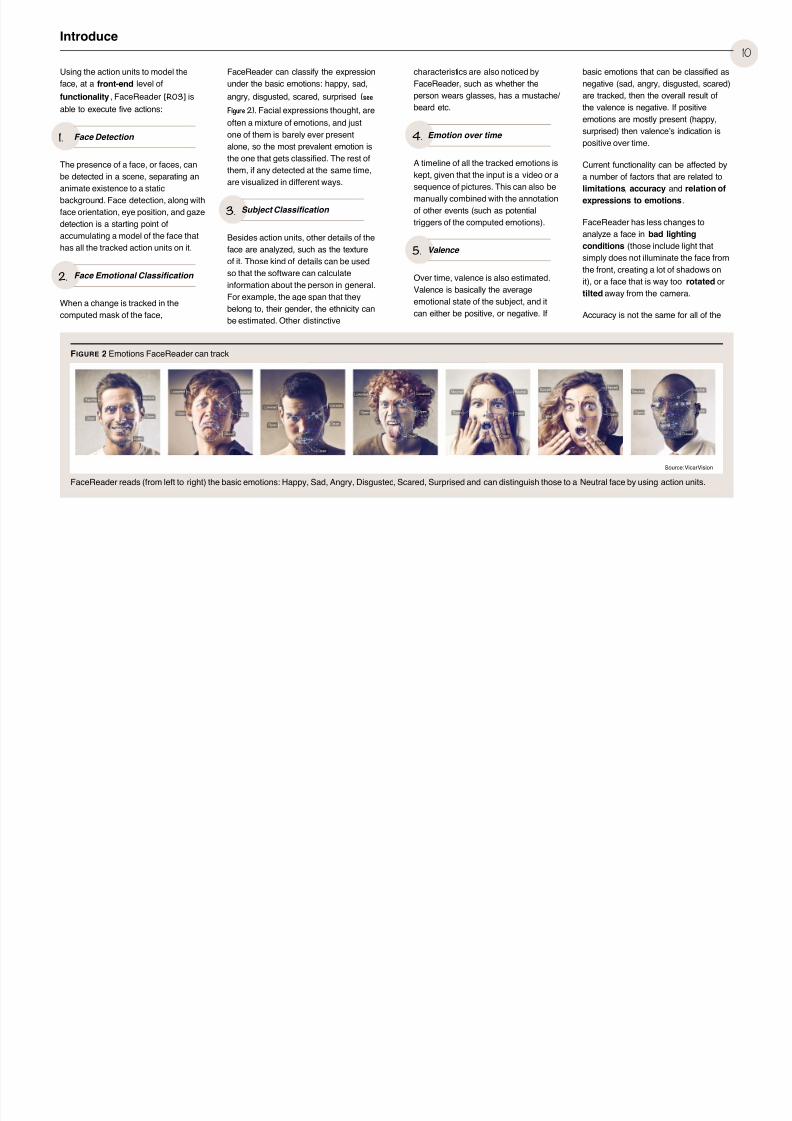
FaceReader can classify the expression
under the basic emotions: happy, sad,
angry, disgusted, scared, surprised (see
Figure 2). Facial expressions thought, are
often a mixture of emotions, and just
one of them is barely ever present
alone, so the most prevalent emotion is
the one that gets classified. The rest of
them, if any detected at the same time,
are visualized in different ways.
Subject Classification
Besides action units, other details of the
face are analyzed, such as the texture
of it. Those kind of details can be used
so that the software can calculate
information about the person in general.
For example, the age span that they
belong to, their gender, the ethnicity can
be estimated. Other distinctive
characteristics are also noticed by
FaceReader, such as whether the
person wears glasses, has a mustache/
beard etc.
Emotion over time
A timeline of all the tracked emotions is
kept, given that the input is a video or a
sequence of pictures. This can also be
manually combined with the annotation
of other events (such as potential
triggers of the computed emotions).
Valence
Over time, valence is also estimated.
Valence is basically the average
emotional state of the subject, and it
can either be positive, or negative. If
basic emotions that can be classified as
negative (sad, angry, disgusted, scared)
are tracked, then the overall result of
the valence is negative. If positive
emotions are mostly present (happy,
surprised) then valence’s indication is
positive over time.
Current functionality can be affected by
a number of factors that are related to
limitations, accuracy and relation of
expressions to emotions.
FaceReader has less changes to
analyze a face in bad lighting
conditions (those include light that
simply does not illuminate the face fromthe front, creating a lot of shadows on
it), or a face that is way too rotated or
tilted away from the camera.
Accuracy is not the same for all of the
10
Introduce
FaceReader reads (from left to right) the basic emotions: Happy, Sad, Angry, Disgusted, Scared, Surprised and can distinguish those to a Neutral face by using action units.
FIGURE 2 Emotions FaceReader can track
Source: VicarVision
1.
2.
3.
4.
5.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 11/130
emotions (see Figure 3). Some are easier
to distinguish than others (e.g. happy),
and some are easier to be
misinterpreted as another emotion
(e.g. sad to angry). As accuracy is a
result of training FaceReader by
annotating many instances of faces that
contain the basic emotions, analysis of
certain categories of faces might be
more difficult. For example asian
faces, or faces of older people might be
a bit confusing for the algorithm as less
numbers of them have been used to
train the system due to low availability
to samples of those categories.Especially for older people facial
expressions might be more challenging
to calculate as the texture of the face
(wrinkles) can confuse the software
when action units need to be tracked.
Another difficulty is that as we get older
expressions in our face get more and
more subtle [J04]. Last but not least,
sometimes FaceReader has difficulty in
getting a good fit of the calculated
‘mask’ of the face given its shape,
lighting conditions and direction/
movement of it around the camera.
FaceReader does not make a
distinction whether a facial expression
is acted or felt, authentic or posed. The
program was trained using a mixture of
genuine and intended facial
expressions but it doesn’t calculate
how relevant those are to the potential
co-existence of the respective emotion
[R03]. The discussion on whether an
expression of your face, that is usually
associated with a particular emotion, is
actually the emotion you consciously
feel, has no easy answer, and can even
get philosophical dimensions. If the
context is not know, or able to
perceive, even humans fail to classifyemotions (accuracy reported in that
case is up to 81% percent) [J04]. For
some emotions, like happiness,
differences are reported between a
‘fake’ facial expression of it and a
genuine one. A genuine smile would
have a quite equal distribution of the lip
raise between the left and the right side
of the mouth, plus the muscles of the
eyes would be contracted too [J05].
However, one really ought to consider,
what is a genuine expression after all
and even if you do have a genuine one
on your face, does that mean you are
actually in accordance to that emotion?
The reality is that even opposite
emotions, or manifestations of those,
co-exist [J06]. For example, imagine a
person attending their child’s theatrical
performance. We expect they are
probably proud, and, therefore happy.
But we see them cry (which would have
been recognized as sad by a facial
recognition tool). Does that mean they
are actually sad? Probably not.Momentarily facial expressions can
not be necessarily associated with a
specific emotion, and the triggers might
be difficult to get identified, even by a
human. Researchers [J07] indicated
that it is possible to create a fuzzy logic
accumulation system of short-term
facial expressions to generate more
relevance of them to the emotions
present and to a long-term frame.
The posed questions are still many, and
by exploring what people think, want,
and above all, need, we might have a
chance to answer them:
“Do we really need an
application where emotions are
relevant?” [J05].
11
Introduce
FIGURE 3 Tested accuracy of FaceReader
Proportion of agreement between the facial expressions scored manually by the
annotators of the Radboud Faces Database [J03] (horizontally) versus the
expressions scored by FaceReader version 4 (vertically).
Source: VicarVision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 12/130
People
Innovation in user-centered design
starts when conflict of interest between
the three drives, business-technology-
people, starts to become conversion of
interest (if such a term only existed!).
However people are in inner conflict by
nature [B02], especially when it comes
to deciding what is beneficial for their
well-being, from products that might
help them to daily routine actions [C01].
That notion of humans being in
dissonance makes the quest of finding
relevant applications in the robotic
industry even more difficult. Although itis a matter of fact that technology is
advancing, and that companies are
willing to invest on it, it is uncertain:
Would humans actually want to
use artificial companions that
are able to perceive their
emotions?
Robots have many limitations that
acceptance is compromised by people
perceiving them wrongly. Technology is
not humanized yet and a balance
between engineering contextual
awareness and designing human-robot
interactions (HRI) is still to be found, in
order to match people’s expectations.
Why should such a technology exist
and what could it do for people is the
turning point in figuring out what kind of
applications could be relevant [J08].
Researchers claim that even if an
interactive robot has complete
information about its context, includinginformation about itself, its
environments and the humans in it, it is
still unclear how this information should
be used to design effortless, acceptable
and meaningful human-robot
interactions [C02]. If there was a
meaning in having an artificial
companion then, maybe, people would
actually want it.
Could a machine be your companion,
your friend? In regard to philosophy,
yes. Many different kinds of relations
can be evoked between people and
objects. Turkle [B03], basing her initial
ideas on theorists and philosophers,
concludes that “objects are active life
presences ”. Most objects exert their
‘powers’ under specific circumstances
of interaction with a human (see Figure 4,
remember how a plain volleyball became the onlyfriend of an adult in the movie ‘Cast Away’?). In a
psychoanalytic level one could say that
“things are what we encounter, ideas
are what we project ” [B04] (also known
as the Rorschach effect [B03]), so the
idea of projecting the possibility of
friendship to any kind of object doesn’t
seem so irrational.
If those things were also able to
respond back to us, as certain
machines can, then it is easier to get
attached to them and become even
more intimate. Thus, relational
artifacts, are “those computational
objects that can present themselves as
sentient creatures, ready for
relationships, are inviting people to
project animation, life and personality
onto them ” [B05]. For decadescomputational machines were thinking
with us, a second self, a ‘mirror of the
mind’, but recently a certain category of
relational artifacts is evolving to think of
their own, making clear they are
perceived as a new state of self, itself,
that goes beyond our projections;
robots [B06].
Ironically, the paradox I see is that, so
far, I haven’t read studies about any
robot, nor artificial companion in
specific, that would go beyond our
projections by being a ‘companionable-
enough’, relational artifact. With logicalsteps I assumed that the real need for
such a companion is not yet neither
uncovered, nor approached
appropriately. Maybe you need
someone that is lonely in the first place
(as in the movie ‘Cast Away’) to offer them
companionship that has chances to
contribute to their emotional well-being,
by offering a desirable and sustained
experience.
Moving a step towards connecting all
the dots so far, and taking into account
that the target group is older people, it
is both reasonable and obvious that
they could be in need of such a
companion. Reflecting on personal
experiences and older people I know,
loneliness seems to be quite often in
that age span and difficult to handle.
The starting point of the assignmentwas actually based on this realization,
leaving, still, open room for explorations
and further refinement of focus:
Design artificial companionship
for older people in order to
prevent loneliness.
12
Introduce
1.2.3
One of the most famous inanimate
objects ever befriended
FIGURE 4 Wilson the Volleyball

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 13/130
The aim and initial
research
questionsThis project was initiated due to
personal interest in the field of HRI, as
it was not just ‘another product’.
Consequently, on a personal level, the
goal was to gain understanding of it
and enough knowledge so that a
personal design framework could be
developed, in order to facilitate a
personal way of working on this, for
future reference too.
On an academic level the goal was to:
Research through design how
artificial companionship could
prevent loneliness, as a means of
psychological support to older
people. The overall psychological
support will be framed within the
design for well-being (medisign
specialization), and design for
interaction (general master)
directions, which, roughly, points at
stimulating social interaction or
providing new meaningful
interactions. This would be done
by exploring, designing,
prototyping and evaluating a
concept of an artificial companion.
This aim can be, initially, divided into thefollowing research questions:
(Chapter 2, 3)
What is a robot, after all. What
are the characteristics of an
artificial companion, and to what
extend are currently helping (or
not) the target group, in general
and in specific when it comes to
loneliness?
(Chapter 2, 5)
What are the existing
approaches of designing
artificial companions?
(Chapter 3, 4)
How can the target group be
analyzed, is there an opportunity
to focus on a specific sub- category?
(Chapter 3)
What is loneliness? What are
the existing coping mechanisms,
and solutions in order to prevent
or address it?
(Chapter 2, 3, 4, 5)
What are the important
‘ingredients’ for an artificial
companion? How can we
translate a vision of them to
behavior of an artificial
companion?
(Chapter 3, 4, 5, 6)
What are the important aspects
of supportive behavior that need
to be realized in an artificial
companion against loneliness?
How can FaceReader contribute?
(Chapter 6, 7)
What are the important aspects
of the concept to be prototypedand how can the concept be
validated?
(Chapter 7)
How is the artificial companion’s
purpose assessed by different
types of users?
Research questions 1,2 and 4 provide
the theoretical background of the
research. In order to deal with those
literature review is conducted, with
specific focus insights in interaction with
existing artificial companions. Since
literature lacks insights in interaction
design vision explorative research wasalso conducted.
Research question 3 provides the
conceptual background of the design.
Combining literature insights and
anecdote stories opportunities for
conceptualization appear.
Research questions 5, and 6 concern
the design of the artificial companion.
Answering those needed to break down
theory into concept bits and testable
‘hypothetical’ routines of an artificial
companion.
Research questions 7, and 8 concern
the implementation, and evaluation of
the concept. Evaluation happened
gradually as it was tested both in young
and older people.
13
Introduce
1.3.
1.
2.
3.
4.
5.
6.
7.
8.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 14/130
The scope and
limitations
In this section, the scope, intended useof the proposed artificial companion,
and limitations of the project, are
discussed. These issues lead to
additional challenges that they either
need to be addressed or to be defined
as out of this project’s scope.
Summarizing the scope of the project,
the proposed concept is based on the
following assumptions:
Buddy is an exploration of howartificial companions can provide...
companionship, not a solution to the
problem of loneliness in elderly.
Seniors are willing to accept
companionship from buddy, without
thinking that this is morally wrong,
because they will have personal gain
(contribution to their well-being) out
of their companionship by interacting.
Technology will improve. For now the
project looks at a future-visionary
level (not necessarily with a future
implementation date but with the
acknowledgment that functionality
can be improved later and
interactions come first).
In more detail those derive from thefollowing considerations:
Loneliness and Participants
Aging, is often accompanied by
consequences, preconceptions and
sometimes stigmatization (in terms of
social perception). It has always been a
sensitive and challenging topic on its
own [B07]. Figuring out what happensin terms of loneliness while aging, is
even more challenging. It seems that
loneliness is that unpleasant feeling (see
Chapter 2) that, not only elder experience
(although it might be more often in them
compared to younger people [B07]) but
all of us have experienced some time.
Some vigorously argue that in the
computer age we are constantly
connected, but we feel more lonely,
because we are afraid of intimacy [B06].
Yet, I haven’t heard any of blatantly
complaining “Oh I feel so lonely”, in my
young or older circles of acquaintances.
Feeling lonely usually doesn’t happen at
a conscious level, and if it does we
prefer to ignore it as a first step [B07], as
all bad experiences are so must stronger
than good ones [J09]. Especially older
people might chose to conceal it in fear
of becoming their family’s burden [B07].
Therefore it is really difficult to measure
how many people actually feel
loneliness, and much more difficult to
find participants with the question
“excuse me, if you feel lonely, then
could you please be part of my
research?”. As a matter of fact, it has
been very difficult to find participants of
older age having almost zero
connections of that age span that could
invest much time in my research in the
Netherlands.
The way to deal with that limitation
was the development of a conceptual
framework. All target groups have
common things to share, as long as you
figure out the appropriate way to
categorize them (see Chapter 2).
Therefore the exploration of the
concept, iterations and initial prototype
testing were done with youngparticipants that could fit to the
conceptual framework. It is logical, that
chances are if a young person rejects a
concept (or parts of it) then an older
person would have rejected it too.
However the other way around has no
logical induction in order to jump to
conclusions, and therefore the final test
was conducted with older participants.
Befriending machines
The whole notion of having an artificial
companion as your friend is perhaps a
bit advanced for our current societalacceptance towards robots. It is really
easy to ‘slip’ into deep philosophical
wander about what is morally good and
what is not [B06]. Is it morally good to
offer an older person cure to their
loneliness by an artificial companion?
Or is it better to leave an elder to the
care of a nurse that has too many other
elder people to care for and, thus,
limited time to really ‘cure’ their
loneliness? As I mentioned before,
humans are in constant inner conflict
[B02]. On the one hand, we would like
to be the company of an older person of
the family, but most of the times, for
various reasons, we can’t be there all of
the time, as an artificial companion
would. On the other one, the idea of
having an artificial companion to spend
time with them instead, seems
unnatural, weird or even repulsive. Tosome people it seems even sadder than
an older person being alone, as they
feel the machine can only have
pretentious intentions of being a
companion and cannot really fell or
understand what loneliness is [B06].
Solving the ethical dilemmas of our
consciousness is not part of this project.
14
Introduce
1.4.
1.
2.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 15/130
5.
4.
3.
2.
1.
However, in order to propose an
ethically aware concept to this matter
‘buddy’ is not proposed as a substitute
of human to human interaction, neither
as a medical prescription (or therapy)
for loneliness but a prevention factor.
Acquiring a ‘buddy’
Although the issue of how an older
person acquires an artificial companion,
and in that case a ‘buddy’ is important
and might help resolving the previous
issue, I considered it beyond the scope
of the concept to design those
interactions.
The starting point of the envisioned
future scenario starts with a senior that
is willing to accept an artificial
companion as their companion, instead
of figuring how to convince them one
could keep them company in the first
place. However insights about
obtaining one were gained through the
testings and are discussed as valuable
factors of acceptance of the overallconcept.
Available technology
As already presented earlier, current
technology is not perfect. I consider this
both a limitation and an opportunity.
On the one hand figuring out how to
prototype and test a concept without
having a robot was challenging. On the
other one it proved to be mind opening
as being able to express creativity, even
in the level of the methods you use orcreate, may reveal opportunities for an
artificial companion that doesn’t need to
be technologically perfect.
Is there a perfect friend, anyway?
Complexity
Current topic can possibly evolve
towards many directions, as everything
is relevant in order to offer a meaningfuland positive experience. Aesthetics,
materials, technology, psychology etc.
This was another factor that was both a
barrier and an enabler. Limitations had
to be drawn in order to reduce
complexity as it is easy to fall in an
‘analysis-paralysis ’ mode. In the
beginning I wasn’t sure how to deal with
this. Later on I decided that in many
points the analysis has to stop with the
premise that no framework, theoretical
or empirical, can ever be complete.
Instead it is important to reveal the full
complexity, to the maximum possible
extend, in order to understand how the
‘pieces’ connect, then act upon it by
adding and removing pieces till only the
validated and refined ones are kept.
The approach
Given the aim of designing an artificial
companionship that prevents loneliness
and, therefore, contributes to the well-
being of older people, a Research
through Design approach (RtD) [J11] is
adopted. RtD endorses the belief that
designing, explorations and, thus, the
act of creating prototypes, is a
generator of applied knowledge and
innovation. For RtD, interaction, is not
only a form of research but it is also a
way of meaning making. Producing
meaningful artificial companions, is
certainly desirable for this project, butalso in the general field of HRI.
Since, to my knowledge at least, there
is no specific design methodology for
designing robots, current process is
derived from a generic user-centered
design (UCD) process [B08] adapted
so that it includes steps to build a future
interaction vision [B09] and steps to
do so by turning it into a participatory
project [B10]. Typically UCD
methodologies follow a understand -
ideate - prototype - evaluate, iterative
phase outline. I would call them parts,
or modes, as phase makes it sound too
linear, whereas in reality many times
you have to iterate in order to generate
insights or make sense, or some other
times those modes just overlap.
Roughly, the modes(see Figure 5)
are
meant to:
Analyze
the outer context of the project,
understanding the target group and
artificial companions.
Envision
future interactions.
Ideate
possible alternatives based on insights.
Validate
the concept through prototype tests.
Reflect
to refine framework, concept and process.
Organization of the report is constructed
so that process is reflected to the bits
and parts of it.
15
Introduce
3.
4.
5.
1.5.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 16/130
16
Introduce
u s e r - c e n t e r e d
g e n e r i c
d e s i g n p r o c e s s
Human-Robot
Interaction
Aging
Loneliness
Artificial
companions Current
Interactions Future
Interactions
Companionship
Ingredients
Concept
Future
behavior
Prototype
for
exploring
Prototype
forevaluation Insights
Recommendations
!
!!
Analyze Envision Ideate Validate Reflect
!
m e
a n s
o u t c o m e
16
Understanding EmpathizingConceptualizing
& PrototypingPrototyping &
Testing
part i part ii part iii part iv part v
desk research
de-structuring
anecdote stories
re-structuring
creative facilitation
workshops/sessions
brainstorming
synthesizing insights
explorative research
involvement of young users
questionnaire
experiments
involvement of older users
• context insights
• refined direction
• conceptual framework
interaction vision • written scenarios
• storyboards
• prototypes
• machine-state diagram
• service concept
• video of the concept
• video footage of participants
• qualitative data
interaction goal
• concept recommendations
• methodology recommendations
D i v e r g i n g C o n v e r
g i n g
Define Challenge Define Insights Define Concept Define End Result
FIGURE 5 The approach

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 17/130
iThis part summarizes learning
points and notions from the
analysis phase, that are
relevant to the development ofthis project. Theory collected
from, mainly, the areas of
aging, motivation, and human-
robot interaction, is used to
define the challenge that will
be address in this project. The
byproduct of this phase is a
new conceptual framework to
tackle the complexity of the
defined challenge.
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 18/130
Chapter Overview
2.1
Robotics to HRI, a long history
2.2 Human-Robot Interaction towards a classification
2.2.1
Classification Framework
2.2.2
Human-Robot Ratio
2.2.3 Application
2.2.4
Aesthetics
2.2.5
Interaction
2.3 What is a robot, what an artificial companion, and
what is it made of, after all.
Every interaction designer always has as an ultimate goal to design
products (or services, or interfaces) where interactions are ‘natural’,
‘intuitive’, ‘effortless’ so that the user experience is unhindered,
smooth, and pleasant. When it comes to humans interacting with
robots that principle can easily backfire. Researchers and engineers
have worked many years, approaching the goal from different
perspectives, creating many different robots, to realize:
there is no such thing as “natural” interaction in HRI.
People do not perceive robots as ‘products’. The more they look like
humans (anthropomorphic), the more they behave to them like if they
were humans. If they look like animals (zoomorphic), then they will
behave to them as if they were pets. So what is ‘natural‘ in that case, to
begin with, and, how do you design what the robot needs to be, in order
to elicit a ‘natural‘ response back?
In this chapter, an attempt to de-structure knowledge (resulting a T-
shaped overview: variety before deepness), that can be used by a
designer, is made.
Analyze
RobotsDe-structuring their ‘nature’
18
2.
19
21
39
22
24
25
32
38

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 19/130
Robotics to HRI,
a long history
One could say that robots have two kinds
of histories: the one that starts in the 20th
century when robot technology was able
to bring to life the first ‘industrial’ robots
[W05], and the other one starts way back,
when people started thinking of the whole
idea of such ‘creatures’ existing.
Before the 20th century, the notion of a
robot usually is closer to that of a
servant. There also other words used
for the same notion, such as automata,android, golem that appear to be
originated as an idea in the mythologies
of ancient Egypt [B13], Greece [B11], and
China [B12]. Other artificial, robotic
devices (e.g. pets) are also reported
[B12]. Robota, etymologically [W07]
derived from Czech, means ‘forced
labor, compulsory service, drudgery’.
From an Old Czech source akin to Old
Church Slavonic rabota ‘servitude’ from
rabu ‘slave’. From Old Slavic *orbu-,
*orbh, ‘pass from one status to another’,
‘orphan’. The word robot is also related
with the German root arbeit, ‘work’. Till
today there still isn’t a definition that
everyone agrees upon and the whole
notion of what a robot is or does keeps
on changing, but it definitely changed
much from ‘being a servant’.
Leonardo Da Vinci is probably the first
to have designed androids and other
mechanics for automated machines in
the 15th century [W08].
The word ‘robot’ first appeared in a play,
written by Karel #apek, published in
1920. The play is about a factory that is
in need of manufactured living beings,
simplified people, as it has chemicals.
These mass-production, mechanical
creatures are often mistaken for humansin appearance but they have no
emotions or capability of thinking [W06].
Isaac Asimov is generally credited with
the popularization of the term ‘Robotics’,
in 1942, marking a new field, and being
the first that formulated design guidelines
for human-robot interaction (a sub-field
that was established much later) with his
“Laws of Robotics” [J11].
Early robotic implementations were
just remotely-controlled devices that
were actually not automated but
contributed in the field of robot
mechanics. For example, in 1899,
Nikolai Tesla demonstrated a remotely-
controlled boat that had ‘a borrowed
mind’. In the patent of this boat, Tesla
writes that “someday mechanical men
will do the work of human race, since
this boat is just the first of a
race” [J11]. It is reported that the public
was not impressed and the press
reports refer to the remotely-controlled
boat as a result of ‘mind control’ [W09].
Research in artificial intelligence
followed the mechanics advancements.
In 1950, Alan Turing publishes a paper
posing the question “can machines
think?”. He probably thought they do,
since he proposed a test in order to
determine whether a machine can think
on its own or not, by convincing another
to believe that the machine is human
too (known as the Turing Test) [J12].
Till recently there was no machine
reported to have passed the test, but
scientists are still confused about a
case that appeared in 2014 [W10].
In 1954 the first ‘programmable’ robotic
arm was developed. This arm will lead
to the first industrial robot, the Unimate,
that was able to work in an assemblyline of General Motors in 1961 [W09].
Later on, attempts to build fully
autonomous robots were made and
the result of those attempts, perhaps,
the most famous one, in terms of
citations, was the first robot controlled
by artificial intelligence, Shakey, made
at the Stanford Research Institute, in
1970. Shakey was able to navigate
alone around through a ‘block of
world’ [W09].
In mid 80s a breakthrough in robot
technology occurred with research inthe behavior of robots. Research was
initially focused in mobility, followed by
research in developing lifelike
anthropomorphic behaviors,
acceptable behaviors and desirable
behaviors [J11].
Human-Robot interaction (HRI) has
emerged in the early 1990s and can be
described as:
"The field of study dedicated to
understanding, designing, and
evaluating robotic systems for
use by or with humans" [J11].
The main goal of HRI is to:
“Understand and shape the
interactions between one ormore humans and one or more
robots" [J11].
Since the 1990s, the focus is on
determining what a robot’s behavior is
made of, bringing new notions to the
field: social intelligence, emotional
behavior, personality [W02], [B01].
19
Analyze
2.1.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 20/130
20
Analyze
20FIGURE 6 Indicative Robotics Milestones
Homerdescribes
automated
walking
tripods and
golden maids
that behave
like real
people
Leonardo Da
Vinci designs the
first android
The word robot
was introduced to
the public by the
Czech interwar
writer Karel #apek
in his play R.U.R.
(Rossum's
Universal Robots)
Tesla builds remotely
controlled boat. The
boat could be
commanded to go,
stop, turn left and
right, turn its lights,
and submerge
Isaac Asimov
publishes the three
laws of Robotics,
making the word
‘Robotics’ well
known to the public,
marking a new field
Alan Turing
proposes a test
to determine
whether or not a
machine has
gained the power
to think for itself.
Since then each
year a contest is
held to test
candidates for
The "Turing Test”
A prototype Unimate
arm is installed in a
General Motors and
soon becomes the
first commercial
industry robot
Shakey, the first
mobile robot with
vision and AI.
The aptly named
robot is an
unstable box on
wheels that
figures out how to
get around
obstacles
R2D2 lookalikes are
vacuuming floors
and singing songs in
Japan, marking an
era where designing
behavior comes first
Robocop, a
cyborg, brings a
dystopia, a
singularity future,
for the public to
be afraid of,
when robots are
technologically
possible.
MIT's Rodney A.
Brooks starts
building Cog, a robot
that is being raised
and educated like a
human
Paro, an artificial
companion, that
is intended to
elicit emotional
responses from
its owners, older
people withdementia
800 BC 1495 1899 1920 1942 1950 1961 1968 1980s 1987 1993 2001
(*) ‘Milestones as selected from [J11], [W02]. Creating a complete overview of all milestones in robotics probablyrequires much more paper. Hopefully this one sets the ground accordingly for the purposes and direction of this project.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 21/130
Human-Robot
Interaction
towards aClassification
In an attempt to de-structure the field of
HRI, so that research questions can be
answer, by gaining understanding of
artificial companions, where do they
stand at the moment, what is an
artificial companion and what a robot is
in general, it is crucial to map the field.
There is no point in making
categorizations of robots without a point
of reference. As a complicated field,
there are many points that could be
taken as a point of reference in order to
start classifying robots. From a
designer’s perspective, a holistic
overview of HRI could be, roughly,
mapped in Figure 7, using information
from various sources [W02], [J17]. The
scheme will later help in classification.
Human-robot interaction (HRI) differs
significantly from human-computer
interaction (HCI), or human-product
interaction. Although there are
conceptual frameworks on the
components that result in ‘natural’human-product interaction experiences
[B14], and human-computer interaction
experiences [J13], there is little evidence
(yet endless theories and research) on
what influences HRI experiences.
It is controversial to define whether a
robot is more of a product or more of a
computer, to begin with. There is even a
dispute that human-robot interactions,
simply, cannot be ‘natural’ and it is a
goal that should be carefully thought as
it has a different meaning when it
comes to HRI. People have been
reported to react to robots differently
according to their looks. For example, If
the are human-like they will treat them
in a human-like manner and they will
also expect a human-like behavior from
them. Hence ‘natural‘ human-robot
interaction is actually a reflection of
what human-human interaction is
perceived to be ‘natural’ in people’s
minds [W02]. But what is natural when
the robot is not human-alike? Hence it
is important to define morphology as a
possible classifier of HRI, but in order to
draw conclusions this it is important to
make correlations and classifications of
different, in other ways, ‘kinds’ of robots.
On the side of human-product
interaction, a modern approach, [J14] of
what the components of human-product
experience are, is:
aesthetic pleasure,
attribution of meaning , and
emotional response.
Thus defining product experience would
be “the entire set of affects that is
elicited by the interaction between a
user and a product, including thedegree to which all our senses are
gratified (aesthetic experience), the
meanings we attach to the product
(experience of meaning) and the
feelings and emotions that are elicited
(emotional experience)” [J15]. A
definition of a ‘natural’ experience would
also include usability, as it seems to
influence all the other three dimensions
that are mentioned [J13].
On the human-computer interaction an
experience would be ‘natural’ with flow
when four conditions are met [J13]:
the user perceives a sense of
control over the computer
interaction
21
Analyze
2.2.
Human-Robot interaction is a ‘synthetic’ field. Adapted from [W02] [J17].
FIGURE 7 Fields in HRI
HRI
Robot’s
‘view’ on
the world
Human’s
‘view’ on
robots
psychology
arts
HCI
Human-Product
Interaction
ethology
design
interaction
design
aesthetics
sociology
engineering
computer science
economics
market gap/business
technology
artificial life
intelligence
machine learning
sociobiology perception
hardware
software
well-being
emotions
meaning
innovation
distributed AI
social emotional
behavior
behavior
logic
physicality
materials
sustainability
Society experiencing HRI
anthropology philosophy
perception

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 22/130
the user perceives that their
attention is focused on the
interaction
the user’s curiosity is arousedduring the interaction
the user finds the interaction
intrinsically interesting .
Researchers [C03] claim that HRI is
different from HCI in four dimensions,
which can be considered in order to
make classifications for HRI and robots.
Those four dimensions are:
the levels of human interaction,
the necessity of environment
interaction for mobile robots,
the dynamic nature of robots in
their tendencies to develop
hardware problems,
the environment in which
interactions occur.
Attempts to create a classification
framework have been done before
[W02], [J11], [J16], [J18], [C04], [J19],
[J20], but they don’t give a holistic
view. A new framework will be created,
to serve a designer’s view.
Classification
Framework
Creating a classification framework can
have multiple applications. Firstly it can
help in marking where a robot ‘belongs’.
Secondly it can help in evaluating a
specific robot against others in the
same category/categories. Thirdly it can
help determine ‘ingredients’ a robot
should have when designing for a
specific category. The last one is the
most wanted effect since, it will help in
the analysis of artificial companions.
The proposed classification is based on
previous frameworks, models, criteria
and components before [W02], [J11],
[J16], [J18], [C04], [J19], [J20]. Taking
Figure 7 under consideration it should be
mentioned that the components
sometimes derive from how the robot
‘perceives’ the world (e.g. application,
and aesthetics in Figure 8), sometimes
how people perceive the robot, the
interact and the experience they have
with it (e.g. interaction in Figure 8) and
sometimes a meta-level of reflection is
needed from observing such relations
as a third-party (second level areas that
will belong to interaction according to
Figure 8 as seen in Figure 9). The ratio of
humans to robots can be considered as
an external factor that can affect all of
the above.
As with everything, there are three
challenges to be taken under account:
The complexity. Taxonomies
keep on getting updated and
evolved all the time,
Factors overlapping, belonging
to more than one categories or
affecting/creating other factors,
Subjectivity is almost
everywhere, making things more
difficult. Some factors can be
logically answered, in some
others people might disagree as
preferences and tastes differ
too.
22
Analyze
2.2.1
Application, Aesthetics, Interaction, Human-Robots Ratio do not give
independent factors.
4->1, 4->2, 4->3: H-R Ratio affects all three: Application, Aesthetics, Interaction
3->1 Form and Function follows Interaction
2->1 Form follows Function
FIGURE 8 Areas of Classification
1
2
3
4
Application
Aesthetics
Interaction
H-R ratio

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 23/130
The proposed
framework (see Figure
9) has may many
possible layers.
Some classifiers are
primary and it wouldbe meaningful to be
defined for most
kinds of robots.
Some other
classifiers can be
treated as secondary,
or even tertiary and
give more light into
defining objective
matters, like
experience. Moving
from Application to
Interaction the
classifiers are getting
from objective to
subjective (see Figure 7,
8). The more
objective a classifier
is, the more it has to
do with how the robot
sees the world.Whereas the more
subjective, the more
it has to do with what
people project upon a
robot or what such a
relation evokes at a
meta-level of
thinking.
23
Analyze
Factors deriving from the main areas: Application, Aesthetics, Interaction, Human-Robot ratio
FIGURE 9 Overall view of classifiers for HRI
Human - Robot numbers
Composition of
Teams
1
2
3
4
Application
Aesthetics
Interaction
H-R ratio
Level of shared
interactionamong teams
Environment
Task Type
Task Criticality
Skills
(processing)
Intelligence
Spatial
Intra-Personal
Linguistic
KinestheticInterpersonal
Existential
Logical/Mathematical
Musical
Naturalist
Autonomy
Morphology
Likeability
Awareness
(sensors / input)
Responsive
(communication means)
Modality
(output)
Size
Behavior
Material
Type
Role
Proximity
Type of proximity
Perceived as what
Acceptability (?)All of the above do not really matter ifthe robot fails in being accepted, but
they do play a role.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 24/130
Human-Robot
Ratio The ratio of people to robots directly
affects the human-robot interaction, but
as a classifier, it simply states the
numbers of each, without indicating howthis affects the interaction [J16]. The
human-robot ratio axis is not one-
dimensional (although it can get
simplified, see Figure 10).
24
Analyze
2.2.2
Examples: Classifying robots according to H-R ratio. Axis could also be represented in a robot-human plot of 2 axis to include more cases.
FIGURE 10 Human-Robot Ratio robot classifier
1 to 1N to N N to 1
(number of) Robots (number of) Humans
N to some few to few few to 1
They are many, and
they are tiny! They
are inspired to ‘bio-
imitate’ behaviors
(e.g. how insects
behave), have
‘collective
intelligence (like
flocks do), and they
can serve various
purposes, like
assemble in one.
Multi-participant
‘receptionist’
system that can
recognize people
that are currently
interacting to those
that are currently
are waiting.
Receptionists-
robotic cameras
can be 1 or more
than 1.
Swarms Receptionists / Distributed surveillance Aibo II
One robotic pet,one human.
Pretty clear!

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 25/130
Under the classifier ‘Human Robot
Ratio’ two sub-classifiers are proposed
[J16]:
Composition of Robot Teams
Many more combinations can be
created (see Figure 11), also taking into
account that robots can act in teams or
as individuals. Teams can either be
homogeneous or heterogeneous
(teams of robots and humans for
example, or other entities).
Level of shared interaction
among teams
This sub-classifier indicates whether
those teams interact more within the
group of robots or towards the group of
people. It is also meant to include who
is the controller of the system (whether
decisions are taken collaboratively by
the robots, or are they given by
humans).
Application
In order to fully define the area of
application of a robot I would suggest
the following sub-classifiers need to be
analyzed. Some classifiers can beanswered easily in an objective manner,
whereas some others are subjective.
Environment
Where is the robot needed to function.
Task Type
What is it wanted to perform.
Task Criticality
How important is it that it finishes what it
has to do.
Skills (process)
What is needed to process in order toperform? (Input will be analyzed in the
Aesthetics-Sensing part (see 2.2.4), and
output in the Interaction part (see 2.2.5)).
Autonomy
How long can it perform without
intervention.
Possible combinations of single or multiple humans and robots, acting as
individuals or in teams
FIGURE 11 Human-Robot interaction combinations
25
Analyze
2.2.3
A l

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 26/130
The environment classifier
The environment where the robot
‘exists’ in, plays an important role in
defining what kind of ‘skills’ it is
expected to have in order to accomplishits tasks. This classifier is also closely
connected to the task type. Note that
some robots might belong to more than
one ‘place’, e.g. robotic toys.
26
Analyze
Examples of robots that ‘belong’ to different environments. Axis ranges from Outdoors (left) to Indoors (right).
FIGURE 12 Environment classifier
PrivateOuter Space Public Spaces
Outdoors (usually with no people) (usually with people) Indoors
Open (earthy) terrain Shared Indoors
Space robotics can
navigate (autonomously
or tele-operated) and
collect samples in space
Factory Spaces
Space Military Industrial Service Healthcare Domestic
Big dog can go where
humans cannot
Industrial robots are
actually the first robots,
production lines,
assembly etc.
Tibi & Dabo wander
around Barcelona in a
quest to serve citizens
Hui Hui will bring things,
like a glass of water, to
patients in hospitals
iRobot’s roomba can
sweep the floors of a
room
A l

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 27/130
The task type classifier
Task type might be very specific and
well defined for some robots. For some
others the task type might be deeply
related to its interaction role (see 2.2.5),and therefore, highly abstract. The task
indicates the direction, and purpose, for
the use and design of the robot/system.
For those robots that is so vague to
define what their task is, it is even more
define what skills should they have.
These are all active areas of researchcurrently. It is suggested that the task
gets specified only at a high level [J16].
27
Analyze
Examples of robots that perform different types of tasks. Axis ranges from Explicit (left) to Implicit (right).
FIGURE 13 Task type classifier
Handle Carry
Explicit Implicit
CalculateCommunicate
Mediate
Manipulators
are usually
robotic arms
for specific
tasks
Navigate
Some robots,
like NAO, are
able to
navigate
around
Kaspar teaches
autistic children
social skills with
repetitive
movents
Assist Educate EntertainKeep
Company
Manipulators Adaptable Mobile Transport Telepresence Assistive Educational Toys Companions
Baxter is thenew generation
of industrial
robots can
adapt to the
environment
and learn
Besides being
able to
navigate
independently,
google car, can
also drive you
somewhere
Furby is one
the oldest and
most famous
robotic toys for
children
The teddy bear
is designed to
just keep
company to
people
Telepresence
robots help (or
mediate)
communication
Riba is anassistive robot,
helping people
(that have
fallen down, or
cannot move)
by lifting them
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 28/130
The task criticality classifier
Task criticality indicates the importance
completeness of the task has. However
it is highly subjective, since it is not
possible to ‘measure‘ the criticality. Forsome task types it might be more clear,
for example in military environments it is
important that the robot will track mines
that are in the ground. But for other task
types it is getting vague, how critical is it
if a Furby fails to keep a child’s interest?
To deal with this issue, it has beenproposed that criticality can be
considered high when failure affects the
life of a human [J16].
28
Analyze
Examples of robots that have different criticality for their task completion. Axis ranges from Low (left) to High (right).
FIGURE 14 Task type classifier
Low High
Robotic toys,
probably, won’t
hurt anyone if
they fail to be
entertaining
enough
Toys Assistive Robotic scouts
This cockroach-like robot can
scout for survivors after
earthquakes. It is of high
importance that it finds them
as soon as possible
Assistive robotscan be of medium
criticallity as they
can endager
someone’s life in
case of failure
Medium
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 29/130
The skills classifier
This classifier is probably the most
difficult to define, as it touches highly
controversial and fuzzy matters.
Depending on the task, the neededautonomy, and the interaction role (see
2.2.5), certain set of skills should be
present. Skills can be translated into
‘artificial intelligence‘. There have been
many formal attempts to definitions of
what intelligence means for a robot
[J21], [J2], [R04], [C06]. Most of those,
point back at matters of autonomy (it is
a vicious circle). A robot, in order to be
intelligent, it has to be adjustable or
dynamic/adaptable when it comes to
autonomy and how it learns and
evolves. Several approaches have
emerged on how this can happen.
Decision-making models led to sense-
plan-act architectures [B16], [C08].Learning-based architectures led to
robots that can get new skills by
learning [J23]. Later on robots were
able to develop their own plans based
on behavior-based systems [J24],
resulting in a sense-think-act model.
Nowadays research try a combination
of models, resulting in hybrid
architecture [B16], [J21]. The goal is to
make pro-active robots, that can be
context aware. What kind of intelligence
is needed though is still under research.
29
Examples of robots that have different level of functionality (skills). Axis ranges from Static (left) to Dynamic (right).
FIGURE 15 The skills classifier
Pre-Defined Adaptable
Static Dynamic
Re-programmable
(Older)
Industrial
robots are
usually pre-
programmed
Adjustable
NAOs can take
decisions on a
sense-plan-act
scheme
Reactive Pro-active
Baxter is the
new generation
of industrial
robots can
adapt
performing
calculations
There is no
existing robot
that can be
fully dynamic,
proactive and
contextually
aware.
CB2 learns and grows up
as a child, mimicking a
child’s actions.
Analyze
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 30/130
What people expect from a robot, or
what they think it is able to do, affects
the intelligence they think the robot has,
and consequently, the skills they think it
has [C07]. However, scientists explore
theories that derive from non-artificial(human) intelligence, like the theory (see
Figure 16) of multiple intelligences [B15]:
Spatial
Naturalist
Musical
Logical-Mathematical
Existential
Interpersonal
Bodily-Kinesthetic
Linguistic
Intra-Personal
30
Analyze
FIGURE 16 Intelligence types and robots that ‘exhibit’ that kind of intelligence (to some extend, at least)
InterpersonalSpatial KinestheticIntra-Personal Linguistic ExistentialLogical
Mathematical Musical
Visualizing the
world,
navigating
accordingly
Understanding
yourself, what
you feel, what
you want
Finding the
right words to
express what
you mean
Coordinate
your mind with
your body
Sensing
people’s
feelings and
motives
Tackling issues
regarding why
we live and
why we die
Quantifying
things, making
assumptions
Discerning
sounds, pitch
tone, rhythm,
and timbre
Understanding
living things
and reading
the nature
The clocky
robotic alarm
wonders awayfrom the
person that it is
intended to
wake up.
Navigation is a
developed
area.
QBO can
recognize itself
in the mirror.There is no
robot that
‘knows’ what it
feels or wants
though.
Siri is probably
an example of
demonstratinglinguistic skills.
Understanding
the linguistic
skills of a
person is a
different matter
though.
Luxo is a
robotic arm that
dances,creating a trail
of dancing light
behind it. It
doesn’t have a
mind exactly
but it does
coordinate.
Pepper is a
robot that
recognizespeople’s
emotions and
can act
accordingly.
The end of life
care machine
probablydoesn’t
understand
what dying is,
but it guides
people through
dying.
These modular
robotic cubes
can assemblebased on
magnetic poles.
All computers
can perform
mathematical
computations.
Logical? Few.
Guy’s
Hoffman’s bots
can jam,accompanying
a person
playing music.
The pareidolic
robot has too
much free timeto observe the
clouds,
searching for
patterns (of
people’s faces
and other
beings).
Naturalist
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 31/130
The autonomy classifier
Autonomy can be defined in regard to
the amount of intervention is needed for
a robot to complete their tasks. Again,
for well-defined tasks it is easy tomeasure if they are completed. For
example an industrial robot that is
responsible for moving things from one
production trail to the next, will have its
task completed if all the pieces are
moved to the next trail without anyone
‘helping it’ (physically or via
teleoparation/interface). For ill-defined
tasks fully autonomous robots simply do
not exist, yet. For example if a robotictoy is to entertain children, but children
get bored of interacting with it within half
an hour, has it completed its task? For
this reason some suggest that
autonomy can actually be measured by
the ‘absence’ of interaction instead
[J16], [C05]. If a person neglects a robot,
will they continue their task? This
approach might help solving classifying
more cases, but in some others mightbe like the case of the tree that falls
down when nobody is around to witness
it has fallen down. So, does it matter if
the robotic toy still continues to play on
its own after the child’s attention has
moved to something else? Well, yes
and no. Yes, because the robot
performs as if it had will on its own (thus
autonomy indeed). No, because it will
not be enough to attract the child’sattention back to playing with it (hence
no interaction with the child which is
part of its task), and because the robot
doesn’t exhibit signs of adaptation.
There is no robot that is fully adaptable
in all types of intelligence, so far.
Examples of robots that have different autonomy levels. Axis ranges from None/Fully Controlled (left) to Fully Autonomous (right).
FIGURE 17 Task type classifier
31
None/Fully Controlled Fully Autonomous
Surgical robotic arms andneedles are used in
specific types of surgeries
(e.g. laparoscopy). They
are fully operated by a
doctor as they are used
for precision reasons
Semi-AutonomousRemotely Controlled Situationally Aware
Mining robots can be
remotely operated from a
safe place for humans.
PABI is a penguin that helps
autistic children socialize. It
is semi-autonomous as it
can both perceive reactions
and controlled by a clinician
in order to give the right
response
Surgical robotic tools Mining robots Assistive Therapy Aerial robots
Quad rotor flying robots
are not only able to
independently navigate
and fly, but they can also
coordinate, if more than
one
Analyze
There is no
existing robot that
can be fully
contextually
aware, not even
for one type ofintelligence.
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 32/130
Aesthetics
Aesthetics is a very old notion which
has undergone a lot of changes in its
meaning [B14]. While it is not of crucial
importance to decide in detail whataesthetics is and what not for the
purposes of this project, it is important
to draw the relations of how it affects
the experience of a human interacting
with a robot and understanding how
much it overlaps with interaction
elements in general (see 2.2.5).
For many people, aesthetics is about
beauty, and appreciation of it as the
term is widely used to characterizesomething as (visually) beautiful [B14].
The etymology of the world links to
much more than that though [W11], as
aesthetics derives both from the Greek
‘aisthesis’ (which means to feel, to
sense, having the ability to ‘understand’
through the sensory system) and the
latin root au- e.g. ‘audience’ (perceive).
Generalizing, aesthetics refers to the
overall sensory (not only visual)pleasure and delight [J25]. Such a
definition can draw a line between what
we sense and what we assign to
something (such as construction of
meaning, or emotions) [J15] which can
also help in differentiating what belongs
to aesthetics and what to interaction in
HRI.
There is much duality built-in in the term
aesthetics though in the field of HRI.
One the one hand it can relate to what
the robot perceives (sensors it has, in
order to ‘feel the world’ technically). This
view is often found in literature as
‘robot-centered view’ [J18], [J19]. On the
other one what the human perceives
about the robot (so the term often links
to the form a robot will have, its looks).
This is often found as ‘human-centered
view’ [J18], [J19].
Classifiers on how people see robots:
Morphology
Size
Material
Behavior
Likeability
Classifiers on how robots see the world:
Modality
Awareness (sensors)
32
Analyze
2.2.4
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 33/130
The morphology classifier
It is often assumed that robots have to
look like humans in order to be called
‘robots’ [W02]. However, robots can
have make forms, from physical to non-physical. Sometimes, depending on
their visual representation they do tend
to be called differently, or might even be
considered software systems. For
example, if a robot doesn’t have a
physical ‘existence’, it will be called
artificial agent (robotic of software). ifthat agent has a virtual face, it will
probably be called avatar [J17]. On the
other hand, if they have a physical
‘body’ they are embodied robots. If they
more human-alike (anthropomorphic),
they are more likely to be called
humanoids [J16]. If they are moreanimal-alike (zoomorphic), they are
more likely to be called robotic pets.
Moreover robots can look like
caricatures, if they are abstract but
they have facial features [J17]. Or, last
case, they might not look like anything,
just being ‘functional ’, as it happenswith industrial robots, where their form
just serves the task they have to
perform [J17].
33
y
Examples of robots that look different. Axis ranges from Dematerialized (left) to Tangible (right).
FIGURE 18 The morphology classifier
Ambient Wearable
Dematerialized Tangible
Avatars Functional
Ambient
intelligence, and
agents are used
in many fields.
For example
nest can learn
and control a
house’s
temperature
Embedded
Romo is a
robotembedded in
an iPhone with
some extra
embodiment
equipment
Boxie doesn’t
exactly
resemble anyknown animal,
but it could
have been one
Abstract
Objectified Caricatured
Biomorphic
Zoomorphic Anthropomorphic
Zoe is a virtual
assistive avatarthat can
express
emotions
Exoskeletons
are close to
functional
morphology in
order to make
people wake
Philips’ iCat, is
a robotic cat,
apparently.
Hiroshi
ishiguro’s
Geminoid HI-4
is an android
that looks like
himself
Giraff is like
this, because it
has to have a
screen and a
camera
Species of
illumination is a
series of robotsthat look more
like lamps,
than animals.
But they exhibit
a pet behavior
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 34/130
The size classifier
As with everything a robot can has a
size, as long as it has a physical form.
A possible axis could range from small
to big, but it is another classifier thatcan be attributed in relation to
something else. However it is quite an
important factor for specific types of
robots and having the same form in
different sizes is not the same.
Moreover selecting a specific size for a
robot might enable or disable some
interactions or trigger a different feelingin the human that confronts it (for
example if it is too big it might seem
threatening).
The material classifier
Analyzing and selecting materials for
products is a field on its own: cheap -
expensive, soft - tough, glossy - mat.
Many properties to define. Yet materialsaffect the overall impression you will get
about a robot. It is absolutely a different
encounter to meat a robot from metal,
than a robot from carton. Roughly put,
this classifier will not be represented in
full detail, though later on there will be a
selection of material to work with (for
prototype reasons). Last but not least,the material of the robot also has an
effect on its price, making it affordable
to end users (or not).
34
y
Examples of robots that have different size
FIGURE 19 The size classifier
Tiny
Small Big
Medium
Tiny bug robot
Huge
Babyloid has the
size of a babyMobiserv has the
size of a sitting
person
Examples of robots that have different material
FIGURE 20 The size classifier
Expensive
Sophisticated Everyday material
Common
Robokind R25 has a
special elastic skin so
that it can be dragged
by motors under it to
display facial reactions
Scrap
Mamoru, a robot
that reminds elderly
to take their pills, is,
the usual, plastic.
Robots can also be
made by scrap
materials and
arduinos
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 35/130
The behavior classifier
How a robot behaves and how should
it, is probably the hottest question in
HRI research the last decade [B01],
[W02], [J11], [B17], [J08]. Initially robotswere not to be interacting with people
at all, they were ‘supposed’ to work fully
autonomously in some industrial setup.
Since they began to be more and more
around people, it is a classifier that can
be possibly inter-related with everything
(appearance, first impressions,expectation breakdown, personality,
consistency) and highly affects how
people perceive the robot and if they
will accept a robot after all [J08].
Behavior can be analyzed in many
ways for example if it seems to be
predetermined, appropriate, intentional,competent enough, real-time,
animalistic, human-alike etc [J17], [J26].
Roughly all the above could be included
in a deterministic vs. stochastic
behavior scale. The more a behavior
seems to be stochastic (not repetitive,with intrinsic triggers), the more the
robot will be perceived as ‘alive’ [B17].
35
Examples of robots that are perceived as having different behavioral ‘freedom’, a mind of their own. Axis ranges from Deterministic (left) to Stochastic (right).
FIGURE 21 The behavior classifier
Controlled
Deterministic Stochastic
RepetitivePredictable
Sphero is advertised as a robot, but it is fully
controllable. The only way someone can see it as
alive is not knowing it is being controlled.
Own Mind
Ollie is a balloon-robot that seems to be triggered by
what is happening in a room. It approaches people
and things to investigate from times to times
Hasbro’s furreal animals have a predictable,
repetitive, animalistic behavior.
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 36/130
FIGURE 23 The uncanny valley effect
The likeability classifier
The likeability could be defined as how
people really perceive the morphology
classifier, which have an impact on how
they will interact with it [J27]. Whereas,according to the vision of having robots,
someday we would like to have robots
that look like us (see introduction), there is
a strange phenomenon called the
‘uncanny valley’ [J28]. According to
that, there is no linear connection
between how much we like a robot to
how much it looks like (and behaves
like) a human. In fact, when a robot is
too much like a human or when itcombines human over-realistic features
with mechanical parts, the result is quite
the opposite; it is perceived as creepy.
On the other hand, you may prefer an
abstract-looking robot but you cannot
really ‘interact’ with it [J27].
36
Examples of robots that have different likeability, as voted by users within the iPad app http://robotsapp.spectrum.ieee.org. Axis ranges from Creepy (left) to Nice (right).
FIGURE 22 The likeability classifier
Creepy Nice
Diego-San is a
robot baby withexpressive face,
yet open head
and metallic
body with
exposed cables.
Albert Hubo is
a bi-pedhumanoid that
consists of
Albert
Einstein’s head
on a space
suit.
NAO is a small
robot that could
be something
between a child
and a pet
Telenoid has
the features of
a small child
yet could have
been a robot
from a movie
with aliens
HRP-4C is just
too much of a
human, as all
the other
Geminoids and
human-alike
robots are.
Autom is a
weight-loss
coach with
baby-eyes.
In the first
place of
‘niceness’, of
IEEE robots,
there is a robot
with nothing
but an icon of
an abstract
face on it.
DLR Biped is
just a pair of
legs. Not
exactly creepy,
just
unidentified
AILA is a futurespace robot, on
wheels, with a
human shape
that is not too
realistic.
Mori’s uncanny
valley diagram
(simplified and
translated)[J27], [J28].
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 37/130
The size classifier
As with everything a robot can has a
size, as long as it has a physical form.
A possible axis could range from small
to big, but it is another classifier thatcan be attributed in relation to
something else. However it is quite an
important factor for specific types of
robots and having the same form in
different sizes is not the same.
Moreover selecting a specific size for a
robot might enable or disable some
interactions or trigger a different feeling
in the human that confronts it (for
example if it is too big it might seem
threatening).
The material classifier
Analyzing and selecting materials for
products is a field on its own: cheap -
expensive, soft - tough, glossy - mat.
Many properties to define. Yet materials
affect the overall impression you will get
about a robot. It is absolutely a different
encounter to meat a robot from metal,
than a robot from carton. Roughly put,
this classifier will not be represented in
full detail, though later on there will be a
selection of material to work with (for
prototype reasons). Last but not least,
the material of the robot also has an
effect on its price, making it affordable
to end users (or not).
Information exchange:
the awareness & modality
classifiers
Under a certain perspective awarenessand modality are the other side of the
coin of each other, in the sense that one
deals with input of ‘information’ and the
other one with output. How this is
conveyed to people could be the
‘responsive’ classifier, what the person
perceives in terms of interaction and
reactions to environmental stimuli.
Those three together are a way to
approach autonomy in terms of
communication with the robot. The kindof information that the robot is able to
receive, process and output also
determine the area of intelligence the
person interacting with it will perceive
that the robot has. For example if a
robot hears, is able to understand what
the person is saying by replying
something relevant back, then the
person will perceive this robot as having
some linguistic awareness.
According to researchers, there are two
primary dimensions to determine
information exchange: the
communication media and the format of
the communication. Most robots
currently utilize three of the five senses
to exchange information: seeing,
hearing, and touch.
These manifest the robot’s intentions
using the following media [J11]:
Visual displays (usually
presented as graphical user
interfaces UIs)
Gestures, including facial
movements or hand ones
Speech and natural language,
which include auditory and text-
based communication and
emphasize dialog interactions. A
sub-category of auditory
communication would be non-
speech audio (various
expressive sounds, like a bell for
alarming someone on a bad
event)
Physical interaction and haptics,
used to invoke a sense of
presence and to promote
emotional, social and assistive
exchanges.
When utilizing more than one of the
above media, then the we are talking
about multi-modal interactions, and
recently attention is focused on building
multi-modal robots in an attempt to
make them react more naturally [J11].
The format of the information varies
across the above mentioned media, but
it affects the quality of the interactionand the believability the robot will have
(if people will be convinced the robot is
actually interacting with them) [J20].
For example the format of the
information exchange in conversational
robots (those the use speech to
interact), can be scripted (with
predetermined answers to specific
words), or a natural language algorithm
can be deployed.
37
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 38/130
Interaction
Interaction in HRI, as mentioned
through previously analyzed classifiers,
can be separated into two categories:
Remote Interaction
Proximate Interaction
Remote interaction cases refer to the
human and the robot not being co-
located spatially, even for a small
amount of time, yet communicate in a
way. For example teleoparated robots
in space belong to this kind of
interaction.
Proximate interaction cases refer to
humans and robots being at the same
location. For example you have to be in
the same room with AIBO in order to
play with it.
Within those categories, it is possible to
distinguish applications that need
mobility and physical manipulation or
social interaction [J11]. For example
industrial robots are in need of
physical manipulation, (tele)operation
of their condition and mobile position.
On the other hand social interaction
includes social, emotive and cognitive
aspects and is needed when interacting
with humans for other kind of tasks..
The role classifier
Depending on the application, a robot
might take different roles [J11], [C03]:
Supervisor
Operator
Mechanic
Peer
Bystander
Mentor
Information Consumer
Similar taxonomies are available in the
literature, however the important thing is
to verify how people perceive a robot’s
role and if that is in accordance to its
task. For example a mechanic would be
perceived as a machine within an
industrial application of a robot. When it
comes to more social interactions, the
robot might be perceived to be more
‘alive’, as if it had sense of its self, and
take roles of being a mentor or a peer.
The proximity classifier
Proximity is closely inter-related with the
intended interaction. As mentioned
before this classifier is determined by
whether people and robots arecollocated or not. However the classifier
is not complete if the type of proximity is
not defined in more detail [C11]. For
example in case of physical proximity
there could be interaction qualities
defined as: none, avoiding, passing,
following, approaching, touching.
This factor becomes of major importance
in supporting, closer, social interactions.
Also is being explored as exhibitingcues, for example approaching might
convey intention [C11].
The Responsive classifiers
Responsiveness is another factor that
could lead to believability, comfort
interaction between a human and a
robot and acceptability rates. It isclosely related to the communication
means (input/output capabilities of a
robot) and the general behavior
someone would perceive in a robot. If
there is a response, then the person
would automatically evaluate if the
response fits to the context, if it is
appropriate to the previous stimuli it
triggered the specific response, the
timing of it, and the quality of it in terms
of content. The level of perceivedautonomy is also affected by those
responses. Other sources that might
ruin a good response might be
technology itself. For example a NAO
might be programmed to interact with
you returning proper responses via
speech, but when it moves it makes
mechanical noise and the voice sounds
rather slow and delayed. All these are
cues that the responsiveness is
worsening the general impression you
have for the robot, leading to believe
that it is more of a machine, rather than
an artificial being.
38
2.2.3
Pet, in order to exhibit that it is a
shy robot, avoids to be touched
when in close proximity to a
person.
FIGURE 24 PET
39
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 39/130
What is a robot,
what an artificial
companion, and
what is it made of,
after all.
So why bother with all these classifiers,
one might wonder. That is for two
reasons. The first one, was that by
collecting and categorizing robots was
my very own sensitizing, since I had no
prior experience and knowledge in the
field. The second one is in order to
grasp the essence of what a robot is.
The concept of robot and artificial
companions is ‘a moving target’ [W02].
Researchers and everybody else
working in the HRI field, are constantly
reinventing what a robot is considered
to be and what not. If we consider a
robot in the past is not what we
consider a robot today. The first robots
were just tele-operated machines. Thenthe industrial robots were just machines
operating without human contact [J29].
We probably don’t think of industrial
robots as being robots anymore, we
would probably think of them as
‘automated machines’. Nowadays our
expectations are raised to pro-active
and intelligent behavior from a robot.
Personally, after conducting this project,
I see that a new definition of what a
robot is, rises, and the boundaries
between ‘smart products’ and ‘robot’ are
vague. More and more companies are
designing the impression, of products
that think of their own, to deceive
people that they have a sense of self,
and therefore are robots (see Figure 26).
39
2.3.
FIGURE 25 Perceived robot definition
What society perceives as a robot develops with time
Teleoperated
Machine
Industrial
Automations
Service
Robots
Super human-
realistic robot
Intelligent
products with
social
interactions
Artificial
companions?
Past Present Future
Sphero is advertised as a “robot” ball. However it seems more like a
teleoperated toy that could deceive someone that doesn’t know there is an
operator.
FIGURE 26 Sphero
40
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 40/130
Sadly there is no definition that satisfies
everyone, or is able to include all the
aspects within. Not surprisingly,
encyclopedias [W16] still have an old
definition of robots:
a robot is "any automatically
operated machine that replaces
human effort, though it may not
resemble human beings in
appearance or perform
functions in a humanlike
manner.
When it comes to artificial companions,
there is no ‘human effort’ to replace.
Their task is to be seemingly useless
[C12] by keeping company. However, if
we take into account the previously
developed classifier map, a companion
is useful, by providing company, but this
task is classified as ‘low criticality’, and
perhaps if that is the only thing it does,it is not perceived as useful enough.
Researchers think that usefulness is
still a needed component in the
equation for artificial companions [J19]:
A robot companion in a home
environment needs to 'do the
right things', i.e. it has to be
useful and perform tasks around
the house, but it also has to 'do
the things right', i.e. in a manner
that is believable and
acceptable to humans"
In order for this to happen the robot
shall behave socially, i.e. it should
possess social skills in order to be able
to interact with people in a socially
acceptable manner [J27]. The first step
towards acceptance and social
interactions is for people to feel they areinteracting with a social presence, they
experience being with another
‘being’ [J38]. The concept of presence
has been argued to be present long
before robots, from the use of traditional
media, such as the television [J39]. An
example of this, from my memories but
probably familiar to everyone, is my
grandma replying to the television
although she knew the television cannot
really understand her or even hear her.
Having it open ‘just to hear someone
within the house’ is another example.
More recently the experience and
research around ‘presence’ has
expanded to virtual reality, computers
and robots [J31], [J38].
Lee [J40] approaches presence as ‘‘a
psychological state in which the
virtuality of experience is unnoticed.’’ As
in the example, he claims that presence
occurs when “technology users do not
notice either the mediated (e.g.,
broadcasted people or places on TV,
telephone conversation partners) or the
artificial (e.g., animated characters or
places, software agents) nature of
objects that are being experienced”.
There are three kinds of presences
[J40]:
physical: The experience of a
physical entity or environment
social: The experience of social
actors including humans and
human-alike intelligences
self: Experience of one’s own
self or selves.
When experiences including physical
entities, social actors or selves are
experienced as if they were real,
feelings of physical, social and self-
presence occur respectively [J40].
When it comes to HRI, the most
important ingredient of an artificial
companion is to exhibit social presence.
If the robot is virtual then the physical
presence is difficult to achieve as a
separate entity (it would be an entity
within the hosting system). The
experience of another self, it is also
difficult for the time being, since
technology hasn’t given robots the
ability to have a real sense of their
selves. However they can give triggers
as if they had a sense of their selves by
conveying the right social cues.
Generating strong feelings of social
presence in HRI is the ultimate goal of
designing artificial ‘beings’ [J17], [J41].
“Without strong feelings of social
presence the experience of social
robots will be nothing more than a
physical experience of artificially
embodied entities” [J38].
The ‘quest’ of current thesis is to designthe evocation of such a presence, find
the proper functionality to it, by taking
into consideration the human factor,
having the functionality attainted to the
target group’s needs.
40
Analyze
41

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 41/130
Getting a basic understanding of how humans can be segmented into
more focused target groups in order to select the most efficient one to
intervene (baby boomers), what are the challenges and which one shall
be addressed (loneliness), which is the right moment to design for
(retirement) and how the situation can be analyzed, is the ground for
designing and determining the context to act.
HumansDe-structuring our nature
41
3.
Chapter Overview
3.1 Growing old
3.1.1 Challenges and problems
3.1.2 Retirement
3.2
Baby boomers
3.3 Loneliness
3.3.1 Loneliness Types
3.3.2
Existing ‘cures’
3.3.3
Current artificial companions
3. 4 Motivation
42
43
44
42
43
44
45
45
46
42
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 42/130
Growing old
“It’s paradoxical that the idea of
living a long life appeals to
everyone, but the idea of gettingold doesn’t appeal to anyone.”
$ Andy Rooney
We all have a certain idea in our minds
about growing old, first of older people
we know and then of our own selves as
growing up. Most of the times it is not a
good picture when we think of it
beforehand. And almost everyone of us
will need some kind of help from others
while getting old (or being old). The
quality of life we envision is bad for this
stage of our lives (see Figure 27).
Our envisioned quality of life is based
on three dimensions: the sense of well-being (living area, economic situation
and health in the current definition),
meaning (sense of purpose in life,
manageability and intelligibility) and
value (or self-worth, self-esteem) [J42].
Somehow (societal pressure helps in
those beliefs too [B07]) we think our
health will be incapacitating, there will
be no purpose, since you can’t easily
reflect on the years to come (the ‘end is
too close’), and we will worth nothing,
as old people do, because you can’t do
much [B20].
Challenges and
problems
The truth is that the challenges are
many, and even when we are old there
are all kinds of scenarios to verify theexistence of the feared situations when
we are young (see Appendix 4). Not
everybody ages the same way, so we
won’t face all the things we imagine, but
we tend to think of all the kinds of
problems at once [B20]:
- Physical deterioration,
- Mental deterioration,
- Social participation absence,
- Financial problems (that lead to worse
living conditions),
- Psychological issues (anxiety,
loneliness, depression).
The facts are that that the old
population will exceed, soon, the
capacity of our society to take care of
them (see Figure 28). We need to focus in
prevention and taking care of ourselves, developing resilience and or
own strategy towards being an older
version of ourselves. Although the
exact mechanisms are not known, it has
been long ago argued that the
psychological well-being, affects the
physical and mental deterioration we
will suffer while aging [J43]. The better
physiology we have, the less problems
will emerge, and if they emerge we will
deal with them positively. Having
emotional strength has been associated
with fewer hospitalizations, less drugs
and alcohol consumed, longer life-span
and even less mortality rates [J43],
[J44].
Wanting to focus on prevention the root
of many issues seems to be
loneliness. If not treated early it leads
to depression and even physical
manifestations as high blood pressure
that might be fatal to old people [J45].
The right moment to intervene is
defined by determined when(retirement) and to whom exactly
(baby boomers).
42
3.1.3.1.1
FIGURE 27 Quality of life
Factors related to the quality of life
Environment:
Biophysical
Sociocultural
Health:
Functional
capacity
Coping
mechanisms
Personality
Well-being
Meaning
Value
External Conditions Individual conditions Sense of
FIGURE 28 An aging world
Demographics in America: by 2030 1
to 5 people will be over 65.
Source: Frog Design
43
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 43/130
Retirement
Retirement is one of the most crucial
moments that can be a turning point
between are fully independent selves
and our ‘transitioning’ selves towards
being ‘an old person’. For many people
is the moment awareness of ‘growing
older’ just hits off (see Figure 29). In fact
the normal belief is that someone is old
after the age of 65, which is the
retirement age in most countries [B07].
If not dealt properly, retirement, is a
serious cause that will lead to isolation,
loneliness, depression and lack of
purpose or will to live [J46]. It is not
black and white but it is a major
transition that need to be bridged
properly.
Baby Boomers
If prevention is the target, before
problems become serious (or even
apparent) the right moment to intervene
is right before retirement. Right now the
Baby Boom generation is transitioning
from the before-retirement to after-
retirement stage, and will be the next
generation (and larger one, in
demographics, ever) of seniors [R06].
The term indicates more than a
generation segmentation, of peopleborn between 1946 and 1964, it is also
used in a cultural context. Baby
boomers are associated with being the
wealthiest generation, one that formed
the world by rejecting the old traditional
values and creating their own ones.
They are highly contradicting and
demanding, they have high expectation
in their quality of life, they want to stay
‘socially independent’, and they now
“approach old age with a mixture of
fear, denial and bravado” [R06], [R07]:
10% of them predict they willnever retire
40% will keep working as longas they can
71% envision working inretirement
Predictions for future old baby boomers
are both good and bad, wanting to work
for as long as possible promotes
independence, but on the other hand,
what if you can’t work anymore?
Fixating on your work doesn’t sound
very healthy nor does indicate signs of
adaptation to an older self [J47], [J48].
43
3.1.23.2.
FIGURE 29 An aging world
Demographics in America: by 2030 1 to 5 people will be over 65.
Source: Frog Design
FIGURE 30 Generations
Baby boomers: currently 50-68.
1883
1901
1925
1946
1964
1980
2000
2014
Lost Generation
Greatest Generation
Silent Generation
Baby Boomers
Generation X
Generation Y
Generation Z
50
68
44
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 44/130
Loneliness
Loneliness, as everything else on this
project, can be found under many
different definitions within literature. We
all know what it feels like though, it is“an unpleasant feeling and is
described as painful and as a lack of
context and connectedness” [T02].
Loneliness is a problem of today’s
(western’s) society and a a ‘silent’
phenomenon [T02]. Many people,
especially older ones, tend to not reveal
those kind of feelings in fear they will
become their family’s burden [B07].
Therefore we cannot have a clear
picture on how many people actuallyfeel lonely, but we can have the large
estimation that 40% of the western
population feels lonely [J49]. Although
there is extensive research in the
correlations between isolation (see Figure
31) and loneliness a direct link is not
found, but there are evidence that one
affect the other. The only certain thing is
that being alone, doesn’t mean feeling
lonely too [J46].
Loneliness Types
No matter what the condition of a
person is (socially connected to people,
or not), loneliness can be felt, and it is
often found as emotional isolation, or
perceived loneliness to highlight that it
is not an objective condition that can be
‘measured’ with observations.
Loneliness is often categorized into two
types according to the above
distinctions as [T02]:
emotional loneliness
social loneliness
That indicates that there are different
‘types’ of loneliness, that are associated
with two different sources [J51].
Loneliness can be:
external , or
internal .
The first one is referred to external
causes and life circumstances to a
person’s life, for example bereavement
of the partner. The second one is
related more closely to internal causes,
like personality type, self-esteem
issues, and existential questions a
person might have [J50]. External
loneliness is mostly associated with
cases of social isolation (or lack of
social connectedness), whereas internal
loneliness relates, among others, with
the absence of a reliable attachment
figure [J50].
It is also possible to classify loneliness
according to past experience and
whether the feelings insist or not [T02]:
not lonely
recently lonely
persistent lonely
recovered from loneliness
The more persistent and long-term
loneliness is experienced, the more
difficult to ‘cure’ it. It is often said that
prevention actions could help people to
avoid it though [T02].
44
3.3.3.3.1
FIGURE 31 Loneliness
Loneliness’ different sources
45
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 45/130
Existing ‘cures’
The problematic situation with offering
someone help on alleviating his/her
feelings of loneliness, is that he/she
has to be in the position of realizing and
accepting the fact that he/she feels
lonely (see Figure 32), [T02].
From the moment someone searches
for help, there are few ways that deal
with helping people that feel loneliness,
when this is not disguised under
another clinical condition (e.g.
depression). Besides the professional
help from a psychologist, the rest of the
approaches do not take into account
the type of loneliness per se. Some of
the approaches are:
befriending services, services
that the senior can get friends
from,
coaching services, services that
the senior can get life coach, for
example when needed advice to
manage a retirement process
and build a plan,
consulting/therapy services,
where the doctor tries to give
the senior the necessary tools to
build resilience in order to
develop cope mechanisms
themselves like lowering their
expectations and setting new
purpose in their lives,
Animal-assistive Therapy (AAT),
in order to give the elder an
attachment figure
assistive technology, recent
approaches investigate how to
bring people closer and make
them feel connected to other
people (e.g. communicating with
family) or to technology itself
(e.g. robots)
Current Robots
Using robots in order to alleviate
loneliness’ feeling is often name as
robot assistive therapy (RAT) as well
[J08], where robots substitute the
animals to have a similar being-
assistive therapy scheme. Such
therapies often take place within
nursery homes, as, when in a home
context, usually it is seen as a simple
companion and not therapy (no-one is
to direct the use of the robots).
There have been numerous studies on
how robots can evoke feelings of
companionship to alleviate feelings of
loneliness to older people (and to
children), using experimental/research
robots, robots with open platforms or
general-purpose robots (e.g. NAOs, and
AIBOs) [J08], [J52], [C13], [J53].
However, there is only one
commercially available robot designed
for that purpose; Paro (see Figure 33).
Paro is advertised to “reduce patient
stress and their caregivers, stimulate
interaction between patients and
caregivers, have a Psychological effect
on patients, improving their relaxation
and motivation, improve the
socialization of patients with each other
and with caregivers, and be the World's
Most Therapeutic Robot certified by
Guinness World Records” targeting
demented older people.
Studies including Paro within nursing
homes, showed that it does have a
positive effect in the mood of demented
seniors. They do feel it as a companion,
they take care of it, they even talk to it
all day. Unfortunately Paro deploys
haptic ways of communication (patting)
and some auditory seal-sounds that
make non-demented people get bored
of it really fast. In the case of demented
people it seems it works so well exactly
because they don’t remember and it
functions as an attachment figure, butfor the rest it is perceived as a useless,
silly, not very reactive either, robot
[J08], [54], [C14], [C15].
3.3.2 3.3.3
FIGURE 32 Coping with loneliness
Steps towards dealing with loneliness
FIGURE 33 Paro
The only robot designed for
‘companionship’
46
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 46/130
Motivation
A last step before moving to a fully
defined working area would be to have
a basic understanding of how human’s
motivation works. After analyzing the
links and segmenting the area of focus,
it seems relevant to apply motivational
boost to retired people. Regarding the
level of emotional detachment, the felt
loneliness can only be triggered by
external triggers in the beginning.
When acting, you become moremotivated, and at some point this might
become routine, internally operated
[B21]. Moving from disengaged, to
engaged behavior (see Figure 34), from
apathy/anxiety to flow, would be the
goal of this project for future retired
baby-boomers as a means to prevent
loneliness.
3.4.FIGURE 34 Framework of motivated behavior
Steps from a-motivated to internally motivated include the intervention of external triggers
Analyze
47

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 47/130
Before acting and after having digested state-of-the-art literature, a
stepping stone of letting things find its own place was necessary.
Normally that kind of step has many known names in design, such as
formulating design requirements, or defining the problem area. I don’t
feel those words really fit, so I will call it a working area, as it is more
about the effect we want to create by combining the right elements in an
artificial companion. This is the summary of all the necessary boundaries
that formulate a basis to design for.
The contextTurning knowledge into a framework
4.
Chapter Overview
4.1
The design focus, drafting a working area
4.2 The creation of a conceptual framework
2.2.1 Gathering retirement stories
2.2.2
The framework
48
49
49
50
48
Analyze
FIGURE 36 Working problem space
8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 48/130
The design focus,
drafting a working
area
The wanted result can be described as
the sum-up of the mapped-areas on the
classification scheme. The interaction
should be within a private environment
(home) and one robot will belong to one
person. The task is to keep company,
which has a low criticality. The robot’s
skills can be ranging from static to
dynamic, as this is a factor that will be
investigated further. It would be good if
the robot could appear to have
existential (sense of self) and
interpersonal (sense of the other being)
intelligence. As far as autonomy isquestioned, it should be perceived as
functioning without needing care,
however, in technical terms that could
also be that it is semi-autonomous.
Morphologically, the main influence was
Boxie. The final proposal shouldn’t look
like a human, or a known pet, but
something that is highly abstract so that
assumptions cannot be made for it at a
glance. Size should be small, to stand on
a desk for example, and portable, but nottoo tiny. The materials would be low cost,
but nice looking. The desired behavior
should convey some stochastic elements
to verify that the robot has existential and
interpersonal intelligence. In terms of
likeability the aim is to involve ‘the
cuteness factor’. Modality will also be
explored further, and the target is not to
deploy only one channel of
communication and use FaceReader in
the visual one. Awareness should be
situational, so that the robot shows that
responds to designed interactions. The
role of it is to keep company, so it
shouldn’t be perceived as ‘machine’, but
on the other hand shouldn’t be ‘too alive’,
just a responsive product. Proximity
should be close, but not intimate.
4.1.
FIGURE 36 Working problem space
Mapping the desired design expectations on the classification scheme
Autonomy
Morphology
Size
Material
Behavior
Likeability
Modality
Awareness
Role (perceived as)
Type of proximity
Intelligence
Skills
Criticality
Task Type
Environment
Human-Robot Ratio 1-1
Private
Keep company
Low
Static Dynamic
Existential
Interpersonal
Semi
Cute
Fully
Low cost
Deterministic Stochastic
Abstract Caricatured
Small
Mono Multi
Situation
Machine AliveMentor/Object
Close
Boxie, has been a major influence
on the directions current project
took
FIGURE 35 Boxie
ResponsiveStimuli-oriented
49
Analyze
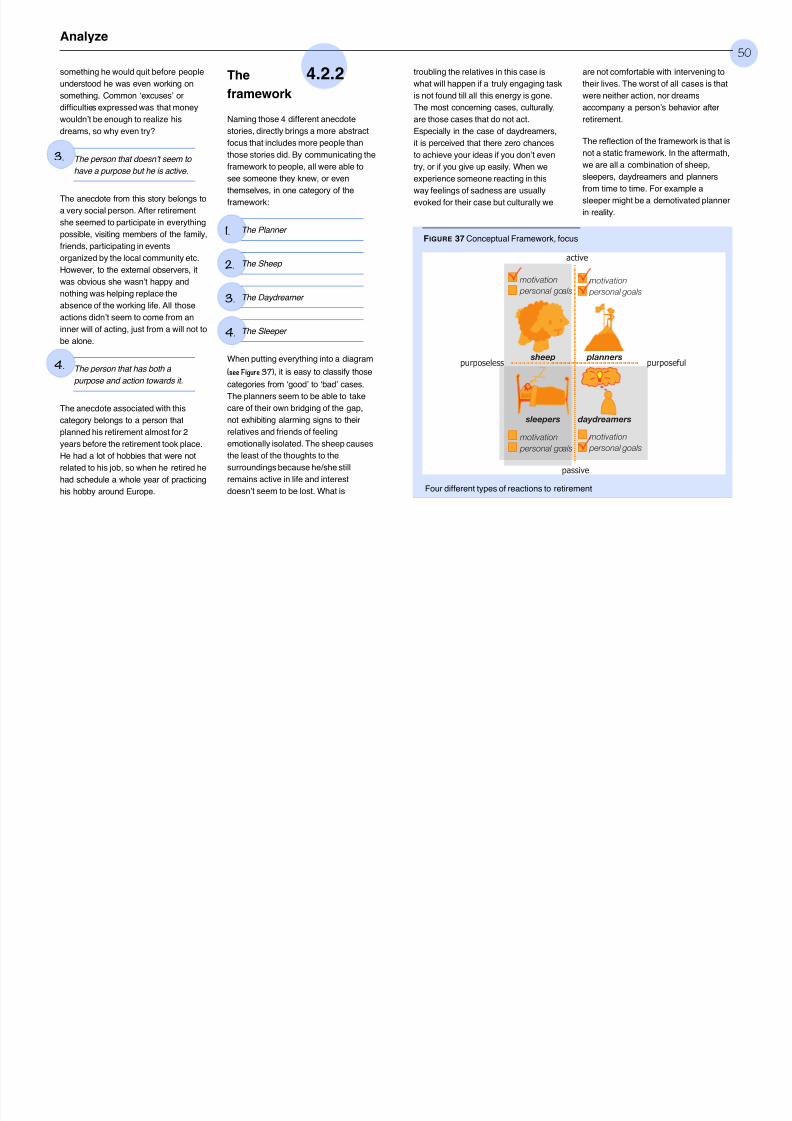
8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 49/130
The creation of a
conceptual
framework
Although there was an understanding
of the HRI field, current robots and
interactions and what the challenges
around loneliness and growing older
are (see chapters 2, 3), it was still
impossible to have a ground to design.
There were no clear signs how
designing artificial companions can
help older people that feel lonely as it
can be due to a number of different
things. It was decided to tackle
loneliness as an effect of retirement
and the changes it brings to
someone’s life. It is estimated that
many people have trouble in bridging
life transitions from their working
context to their after-retirement
context. One consequence of that
miss-match is a perceived loneliness,
or emotional isolation.
In order to start ideation I felt there
were two parts missing from the bigger
picture. One was that literature doesn’t
describe enough empathetic insights
about how people really perceive
robots and their latent wishes on how
robots ideally should be, and the
second one was how people react
while retiring. The first one was tackled
by conducting participatory, creativesessions (see chapter 5), and the second
one by dividing the target group further
into categories that application of
design can take place. The conceptual
framework enabled me to find
something very specific so that the
final robot proposal is not ‘a bit of
everything’, but a robot that does well
only one thing.
The process of creating the conceptualframework was iterative in itself as
well. First a recollection of personal
memories of people that retired was
collected in order to draft an initial
version of the categorization. Then the
scheme was communicated to people
in order to see their reactions, if they
can possibly see themselves in it or
other people they know. Finally, the
framework was also evaluated (see
chapter 7), via questionnaire and mini-
interviews of people. The goal was not
to create a fully inclusive framework of
all possible categories for retiring
people and their behavior, but a tool, a
stepping stone, that will give the
project a focus and the possibility to
have a design area of application.
Gathering
retirement stories
Gathering retirement, anecdotal stories,
was an eye opener that made me move
from thinking about the project andresearching to doing things. At a first
glance I was able to roughly split the
population in two categories: those that
have a problem when retiring and those
that simply don’t. That brings new
questions though, what do people do
differently if they aren’t facing problems
when retiring? I found two possible
answers to that. They either plan their
actions so that bridging the two lives is
smooth, or they just follow whatevercomes in their way. Those that have
trouble in bridging the two phases in
their lives, either had unexpected issues
or they simply didn’t manage to plan
their way through the expected ones. By
reflecting on the anecdotal stories I had
in my mind, from people I knew, I saw
there were 4 patterns worth splitting the
retiring reactions of people into. It seems
that the patterns are created because of
two axis that map the area: action and
purpose. The combination of those two
create 4 categories based on whether
action is taken towards a certain vision
for your after-retired life or not. After
some more consideration I was able to
give each category a representative
name (see 4.2.2).
The person that doesn’t either
have a purpose or act towards
something.
The whole story behind this anecdote is
perhaps a familiar one. The retiredperson, after the retirement used to
linger in the house, doing nothing. His
children thought this is a very unusual
behavior of him, because he didn’t have
the slightest will to do anything, besides
watching TV, even if their family asked
him to participate in something. This
story came from a friend while
discussing about my project, and she
also confined to me that they were
hoping the situation will change when
the friends of the retired person will also
be retired, as now no-one was at the
same situation to help.
The person that doesn’t act
towards something, but is
dreaming about many things that
could be done.
This person can be easily be mistaken
to belong to the previous category, as
external observers only perceive that
the person is doing nothing. In the
anecdote I collected the story is that the
retired person often expressed he
wanted to do a lot of specific things, but
he never initiated anything, or if he tried
4.2.4.2.1
2.
1.
50
Analyze

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 50/130
4.
3.
2.
1.
something he would quit before people
understood he was even working on
something. Common ‘excuses’ or
difficulties expressed was that money
wouldn’t be enough to realize his
dreams, so why even try?
The person that doesn’t seem to
have a purpose but he is active.
The anecdote from this story belongs to
a very social person. After retirement
she seemed to participate in everything
possible, visiting members of the family,
friends, participating in events
organized by the local community etc.
However, to the external observers, itwas obvious she wasn’t happy and
nothing was helping replace the
absence of the working life. All those
actions didn’t seem to come from an
inner will of acting, just from a will not to
be alone.
The person that has both a
purpose and action towards it.
The anecdote associated with this
category belongs to a person that
planned his retirement almost for 2
years before the retirement took place.
He had a lot of hobbies that were not
related to his job, so when he retired he
had schedule a whole year of practicing
his hobby around Europe.
The
framework
Naming those 4 different anecdote
stories, directly brings a more abstract
focus that includes more people thanthose stories did. By communicating the
framework to people, all were able to
see someone they knew, or even
themselves, in one category of the
framework:
The Planner
The Sheep
The Daydreamer
The Sleeper
When putting everything into a diagram
(see Figure 37), it is easy to classify those
categories from ‘good’ to ‘bad’ cases.
The planners seem to be able to takecare of their own bridging of the gap,
not exhibiting alarming signs to their
relatives and friends of feeling
emotionally isolated. The sheep causes
the least of the thoughts to the
surroundings because he/she still
remains active in life and interest
doesn’t seem to be lost. What is
troubling the relatives in this case is
what will happen if a truly engaging task
is not found till all this energy is gone.
The most concerning cases, culturally,
are those cases that do not act.
Especially in the case of daydreamers,
it is perceived that there zero chancesto achieve your ideas if you don’t even
try, or if you give up easily. When we
experience someone reacting in this
way feelings of sadness are usually
evoked for their case but culturally we
are not comfortable with intervening to
their lives. The worst of all cases is that
were neither action, nor dreams
accompany a person’s behavior after
retirement.
The reflection of the framework is that isnot a static framework. In the aftermath,
we are all a combination of sheep,
sleepers, daydreamers and planners
from time to time. For example a
sleeper might be a demotivated planner
in reality.
4.
3.
4.2.2
FIGURE 37 Conceptual Framework, focus
Four different types of reactions to retirement
!"#$%&
'!(($%&
')*'+(&,&(( ')*'+(&-), sheep planners
sleepers daydreamers
motivation
personal goals personal goals
motivation
personal goals personal goals
motivation
motivation
Envision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 51/130
iiIn this part attempts to explore
possible futures are described.
In order to cover the gap
between the fields of design
and robot engineering, room to
feelings and intuition was
given, using methods that
enable diversion of new ideas
and opportunities. The
byproducts of this phase, in
combination with the findings
of the previous part of
analysis, are the interaction
vision and goal, along with the
‘appropriate ingredients’ that
seem to be needed to establish
the envisioned human-robot
interaction.
Envision
Envision
52

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 52/130
CompanionshipFrom future context to ‘friendly’ qualities
In the first mode of the project, the analysis, which was mainly literature
review, de-constructing and re-constructing the notions of HRI, robot,artificial companion, and the baby boomer generation, took place.
This allowed for a clearer understanding of the context, the factors and
gave the project a focus.
Usually after having such an analysis done, a designer is able to start
designing, as either design problems or opportunities are arising.
However my experience was that when I attempted to design, all the
ideas I had where really far away from being considered as relevant;
they were all over the place. Understanding was there, but I lackedempathy about what people really want in an artificial companion.
Such qualitative information isn’t available in the literature, so explorative
research has to take place.
Therefore this chapter approaches the question:
How can a designer shape future interactions between people and
artificial companions?
5.
Chapter Overview
5.1
From literature to vision
5.2
Three creative sessions towards companionship
5.2.1 Session planning
5.2.2 Facilitation
5.2.3 Results
5.3
Creative session towards future functionality
5.3.1 Session planning
5.3.2
Facilitation
5.3.3 Results
5.4 Creative session towards interactions
5.3.1 Session planning
5.3.2
Facilitation
5.3.3 Results
5.5 Interaction Vision
5.6. Interaction Goal
53
66
71
74
75
55
60
62
66
68
70
71
72
72
54
53
Envision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 53/130
From literature to
vision
In the literature [J11] it is reported that a
designer can affect interactionsbetween humans and robots by
affecting five attributes:
Level and behavior of autonomy
Nature of information exchange
Structure of the team
Adaptation, learning, and
training of people and the robot,
and
Shape of the task
“Interaction , the process of working
together to accomplish a goal ,emerges from the confluence of these
factors . The designer attempts to
understand and shape the interaction
itself, with the objective of making the
exchange between humans and robots
beneficial in some sense” [J11].
With the theory and conceptual
framework presented in the previoussection, some of the attributes are
defined. For example we are talking
about a one-to-one human-robot
interaction as in order to evoke the
sense of companionship you need a
personal artificial companion.
The general target area can be defined
for the level and behavior of autonomy.
We know that artificial companions
need to be at least semi-autonomous in
order to be considered as having
intentional behavior [C04].
However the rest of the factors are
under exploration. Linking literature to
building a future interaction is a quite
challenging task. There is no outer
framework, despite the fact that there
are some methods in HRI (mostly
known methods from other fields, like
HCI) [J11]. A lot of questions are not
easy to answer with conventional
design methods, such as how can we
design the future interactions, why
should an artificial companion exist and
why would it do for people, do we need
an artificial companion that emotions
are relevant?
In order to answer those questions and
build an interaction goal and interaction
vision I combined tools and methods
from Vision in Product design (VIP) and
Creative Facilitation (CF) [B09], [B10].
While I didn’t follow any of those by the
book, I kept the philosophy of both inorder to bring the theoretical knowledge
to a level that would have applicable
use. In VIP it is important to de-structure
and re-structure the notions in order to
see with ‘new’ eyes what is needed to
be designed by establishing why it has
to exist ‘‘raison d’être’. The core values
of VIP are: freedom, responsibility and
authenticity and they are met by using
the right Creative Facilitation tools to
converge, analyze and interconnect the
different ‘building blocks’ (factors). CF
has many tools in order to break
assumptions, reaching visionary (often
non realistic) points of view, and then
bringing them back to earth. Most of the
times the end-result of a CF might be
disappointing but what it matters is the
insights you get during the facilitation of
the session, the stories people tell and
the discussions they make. After thesession further analysis is possible (if
needed) by the designer.
I used this approach of conducting CF
sessions two times during the project: in
the beginning (before ideation) and
while refining the concept (end of
ideation). In total five sessions were
conducted. In the first place (three
sessions) it helped in revealing design
opportunities that would be both down
to the ground yet free of false
assumptions about what people want
from an artificial companion. In the
second one (two sessions) I wasquestioning the concept itself, how
could it be further detailed in
functionality and interaction by gaining
unbiased input (so participants didn’t
know what the concept was).
In all of the sessions the participants
were students studying either
interaction or strategic design which
was very helpful in thinking out of the
box, in both a visionary manner and inregard to interactions. All of the
discussions were interesting, insightful
and to the point. To my surprise every
single thing that emerged during those
CF sessions were things that are also
mentioned in the literature. With the
only difference that the participants
haven’t read any of that literature.
Which just confirms the importance
explorative research can have and the
rich insights it can give you despite
being often dealt as a waste of time by
corporations [B10].
In the end of the first round of sessions,
I was able to combine theory to
exploration insights by formulating an
interaction goal and vision.
5.1.
54
Envision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 54/130
RQ5.
RQ6.
Three creative
sessions towards
companionship
In the first round of sessions, the goal
was to get inspired in order to be able
to connect the dots between theory
and design but, mainly, to get empathy
about what people want from an
artificial companion. A side question
to the exploration was what role could
emotions play in your relation with an
artificial companion, given that the
companion would be able to read them
from your face (just as FaceReader
does). Reflecting back on the research
questions (see chapter 1) the relevant ones
were:
What are the important
‘ingredients’ for an artificial
companion? How can we
translate a vision of them to
behavior of an artificial
companion?
What are the important aspects
of supportive behavior that need
to be realized in an artificial
companion against loneliness?
Since FaceReader can read six
emotions (without including the neutral
state), I assumed that it would be
overwhelming for the participants to
include all of them in one session. I
decided to split them along three
different sessions:
Happy | Sad
Scared | Angry
Disgusted | Surprised
This selection was made because in
this way there is an association
between the emotions of each pair: they
can be somewhat related, by being
almost opposite feelings. According to
that, the pair happy-sad was an
immediate selection, whereas for
pairing the rest (scared-angry-
disgusted-surprised) was not possible
to create a one positive versus one
negative emotion as they all negative
(minus the surprised one). However it
seemed a better fit to put scared
together with angry as they are a bit
opposite by expressing a defensive
versus offensive stance.
From session to session small
alterations occurred, taking under
consideration comments the
participants had, and personal
observation on the flow, outcome and
quality of the discussions during the
session. As it is always mentioned in
CF, a plan is always needed so that you
can improvise and handle issues away
from it, if necessary [B10]. This was also
the case in those three sessions. For
example in many cases I had to steer
the discussions away from ethical
matters (and they arose in all three
sessions), since it was not part of this
project’s goal. On the other hand I didn’t
want to give the participants a clear
view of the goals as it would limit their
view before they even start the session
(something that is against thephilosophy of CF).
As additional information on the
organizational part of those session, I
chose to keep them rather small in
numbers so that intimacy levels and
stories created are easy to get shared
and discussed. The sessions didn’t last
longer than 1.5 hour (as people are
getting too tired to be creative after that)
with no intermediate break in order not
to lose focus.
Last, but not least, the result was that
after those sessions I had a clearer
focus and grip of the overall project.
There were many insights that I got
directly from the discussions made, but
I also gathered, clustered and analyzed
the post-its from all three sessions.
Even though the participants were
different, and the emotions used as
well, they all had the same patterns,
which was interesting to see.
As mentioned earlier, the last exercise
of CF usually invites the participants to
build something out of their exploration
(either a design, a vision, a story etc),
and most of the times it is expected to
be unusable by the designer. That was
also the case for these sessions, the
end result was of rather low quality, but
it was interesting trying to figure out why
it doesn’t work whereas the sessions
were so fruitful.
Nevertheless, the planning of the
sessions worked out quite well.
5.2.
S i Pl i videos was the best option Using a analysis phase I had conducted For
55
Envision
5 2 1

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 55/130
5.
4.
3.
2.
1.
Session Planning
The structure of the session had as a
goal to give the participants an
understanding of what I am doing, the
overall project and the available
resources, without intervening withwhat they believe about it. Instead I
wanted them to build their own opinions
and view on it. The only thing I wanted
to affect in their thinking was what they
perceive as ‘robot’, because it is so
often misinterpreted. The general
outline of the sessions was:
Sensitizing Participants
How to define companionship
Clustering and discussing
Characterize companions you
know
Clustering and discussing
Form personalities
Future scenario ‘what if’
Sensitizing participants
In order to sensitize participants and get
them aligned to the view I gained by
conducting the analysis, I estimated it
was not enough to just explain the topic
to them. I had to show them some
cases of robots, and in particular of
artificial companions. Pictures are not
enough in order for someone to
understand the interactions and the
impressions you get from a robot, so
videos was the best option. Using a
blog, where I collected many different
types of artificial companions, some in
the borderline of what an artificial
companion is, (see Figure 38), I selected
few examples of them for the
participants to view. From creepy ones(over human realistic), to cute ones
(artificial pets for children), or even
robots that are just made from boxes.
Besides sensitizing them with videos, I
also gave them few insights from the
analysis phase I had conducted. For
example that the role of artificial
companions is what their name is
conveying, keeping company, which is
not ‘much’, yet so difficult to shape tasks
and interactions. That it would be good
to be empathetic towards people, but wedon’t know how. Also that research
shows that the cases that have better
acceptance, seem to be the ones that
are ‘stupid, but cute’, as people just
project assumptions onto them.
5.2.1
FIGURE 38 Artificial companions, the blog
A selection of
artificial
companions,
available at
http://
artificialcompan
ion.tumblr.com/
was used in
order to give
participants an
understanding
of how much arobot can be
different from
what the word
‘robot’ is
currently
associated
with.
56
Envision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 56/130
How to define companionship
Since the area is quite undefined, an
explorative brainstorm is the best step
to make the participants find their point
of view on the topic. The How To’s
technique (H2) is very simple and starts
with a central question. The question
was ‘how to define companionship’, by
looking into personal experiences,
friendships, belongings and writing
down every possible word that comes
into in your head. The general idea of
H2s is to diverge, by creating a pool of
points of reference for later use. It is
advised to the participants that nothing
is really irrelevant in this phase, and to
postpone (self)judgement. The H2 can
spiral out in many iterations (especially
if participants have trouble writing downmore than 2-3 words), building a core,
and outer circles that can associate to
the topic (like an onion). This way the
result is quantity and variation. The
objective is that each member can
contribute to the definition of the posed
question, so that many different
perspectives are in the table. When
iterations seem to be enough (not too
many though), it is nice to invite every
member of the team to have a small talk
about what he wrote down. This
technique usually is followed by a
typical clustering of concepts and
further discussion within the team on
how to cluster and title the groups.
Characterize companions you
know
The next task is to write down as many
adjectives as possible that characterize
the qualities of a companion. To do so,
the participants are advised to have a
flash back to personal experiences with
friends, pets, objects. This task
functions almost as a H2 layer on top of
the previous one. Again, the direction is
not to judge the relevance, or not to
write down only the ‘good’ properties, as
often, what we receive from our
friendships and companionships is not
only good. People tend to romanticize
notions that are helpful in the aftermath,
but we need to diverge even more and
look beyond that. So, if they experience
that a friendship they had was acquired
because someone was ‘shy’, or
‘ridiculous’, or ‘annoyingly talkative’ then
those are definitely adjectives we want
to see in the table. In the end a small
talk is made by everyone, and cluster
into a scale from positive to negative.
Form personalities
Having access to all of the above (in
form of post-its) the participants are
asked to select some of the things and
formulate a persona/personality. This is
a step towards converging the session
and a preparatory mid-step for the next.
Future scenario ‘what if’
The future perfect is a technique that is
based on story telling. It is the final step
of the session where every building
block, falls into place. The future perfect
scenario is that there is a lady, of 60
years old. She doesn’t work and
therefore she says many hours at
home, alone. Imagine that you are an
artificial companion, that has the
qualities of personality you just
selected. What would you do if you
sensed that the lady is ‘under the effect’
of the following emotions (two emotions
are given per session):
Happy | Sad
Scared | Angry
Disgusted | Surprised
The participants brainstorm and present
their stories to the rest of the team.
As with every CF session, for closure,
every participant is invited to give shortfeedback about anything they want. It
can be advice about how the session
was conducted, or a question they have
want to discuss further. In any way the
session is predicted to end with further
discussion on something the
participants found interesting or difficult.
57
Envision
FIGURE 39 Creative Session no.1

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 57/130
Working with emotions: Happy | Sad
Interaction design | Strategic designstudents
Participants
58
Envision
FIGURE 40 Creative Session no.2

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 58/130
Working with emotions: Scared | Angry
Interaction design | Strategic designstudents
Participants
59
Envision
FIGURE 41 Creative Session no.3

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 59/130
Working with emotions:
Disgusted | Surprised
Interaction design | Strategic designstudents
Participants
Facilitation companionship were quite extravagant. • A robot with (pretended) dementia
60
Envision
FIGURE 42 Pixar’s lamp
5.2.2

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 60/130
Facilitation
First Session
The first group dealt with the topic in a
very humorist yet serious and
concerning way. Many times the
discussion was turned to ethical and
psychological issues. For example the
question that was discussed was
whether it is ‘safe’ to leave an older
person that lives alone with an artificial
companion or will it affect its well-being
negatively, in an irresponsible manner,
since it cannot know the full context, or
how serious it is.
Besides those kind of concerns the
group discussed that most of the times
you chose to make friends the oddest
ones, not those you look ‘good for you’.
Companionship is often based on
vulnerabilities, since otherwise there
are no opportunities to show that you
really care, or offer your help. Being a
bit crazy is another quality that is on the
borderline between good or bad,
depending on the case. Usually itaffects you in a way that changes your
bad mood and motivates you to do
things. The bad thing is that sometimes
it motivates into crazy things as well.
The personalities they chose to
construct, out of the pool with the
adjectives and the definition of
They all agreed that designers deal with
such things (companionship, loneliness,
elderly) in way too ‘serious’ way,
whereas there should be some
‘lightness’ to counterbalance the
negativity of the notions themselves.One participant said, “I don’t really know
if I will change opinion when I will be 60,
but I wouldn’t want company from a
serious companion. I would prefer it to
be a bossy, mischievous weirdo that
sometimes yells at me for worrying too
much and not being boring ”. So the
personalities they built were shy, sloppy,
day-dreamers, grumpy and they even
had hobbies of their own (one could
cook and another one used to play thepiano once upon a time).
This team was the only team that was
able to construct stories for the final
task of the session. I attribute that to
two factors. The first is that the
emotions this session had (happy/sad),
were the ‘easiest’ ones. The other one
was the humor levels of this group, that
made those stories so impossible, yet
so compelling if were indeed true for a
companion. They did build their own
vision of motivating elderly based on
projecting qualities of generation Y
when they will be 60, humor,
vulnerabilities and not taking life too
seriously as a ‘medicine’ to loneliness.
Indicative stories they created included:
that kept on asking “where is the
piano”, every time the elder person
was sad, for distraction.
• A robot that was an idiot, but
mischievous enough to always ask toget carried out of the house for a
walk instead of standing still inside.
• A robot that was over-sharing,
complaining all the time, that started
describing cooking recipes when the
elder person was happy, asking for
that recipe for dinner.
• Last, a robot that was so brave,
honest and direct that every time the
elder person was sad was getting
mad at him. There was a post-it
saying: “Sad? Again? There is no
reason to be sad. I will jump out of
the window instead of you ”. And
another one: “Why worry? You will
die, I am the one that will stay here
forever! ”
Second Session
The second group was more concerned
about defining how an artificial
companion can seem “alive”,
“believable” and how that would be
translated to interaction qualities, ‘flavor’
of voice, wording. For example,
someone said that “pixar’s lamp would
be the best companion ever, it was so
motivating just to see it moving around “.
He also continued by saying “but if it
had to talk then I would really have to
think about how to make it trustworthy
by giving it a deep, calm voice, and that
would ruin it with that kind of
movement ” (see Figure 42).
They also discussed philosophical
questions, for example, how much
“attached” should you get to your
artificial companion?
The personas the second group built,
were nothing but boring or normal, as
well. Someone from the group
associated the session with a famous
Japanese product that has extreme
attributes too (see Figure 43). This group
was the only one that had a long
Pixar’s lamp was brought up as
an example of “believable
animacy of a lifeless object”
during the second session.
5.2.2
discussion on negative adjectives on The second group took the story telling They also built their own vision of a to the rest of the groups that they
61
Envision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 61/130
companionship being actually positive
under certain circumstances and they
created a middle category (between
positive and negative) when clustering
for those. For example, if you are a
slow-tempo friend then probably youmake other people either get annoyed
by you, or also feel relaxed.
The personas they constructed
however, they were less developed
(they used 3-5 adjectives each). This
might be because this group had six
participants that may felt that explaining
a bigger persona would take too much
time (or they just would had preferred it
to be more simple).
quite seriously. The assigned emotions
were quite difficult for a robot to deal
with, as it seems (scared, angry). They
tried to build stories that could trouble-
shoot the situation by asking too many
open questions at the elder. Such aswhat is going on, why are you like this,
what can I do for you etc. But they gave
up trying, ending up discussing if that is
a means of stigmatizing the elder
person further by making them feel
incompetent, like a child that need to be
told what to do and what not. They also
mentioned that old people usually don’t
like to be told what to do (which would
have been quite a right guess for the
specific target group).
perfect robot using the metaphor of “a
guardian angel” that is around you
always, providing structure, daily
rhythm, but only appears when it is
really needed and not to bug you. Or a
knight, that is noble, kind, and able tosave you (see Figure 44).
Third Session
The third group followed the same
patterns when defining what
companionship is, more or less. They
discussed about how you may have
similarities with your friends but also
differences and that what comes above
all is to reciprocate and have an ‘equal’
rate of giving versus receiving in order
to keep a ‘fair’ relation with someone.
They also discussed that it is important
to have more similarities in things like
views on life itself, and differences in
superficial things, to keep an interesting
relation.
This group had difficulties both in
constructing personas and stories. In
order to deal with the first I asked them
to create one persona all together. That
might have happened because the
session was quite early and creative
thinking was difficult to evoke. However
it was interesting to see how different
(see Figure 48) the personality they
created collaboratively was, compared
created many individually. They actually
collected all the attributes that were
‘nice’ to have, after discussing a lot of
time about what should they include
and what not. The result seemed to be
a boring character, and they actuallycommented about that, realizing that it
conflicted with everything that they said
previously about companionship.
When trying to approach the task “what
if” you were the robot, and what would
you do if the elder was surprised or
disgusted, things became even more
difficult. On the one hand there was not
enough input to support any kind of
action with the given personality, and onthe other one nothing seemed to be
relevant for those emotions. They felt
that both of the emotions will not have
been caused by the robot itself and the
robot wouldn’t be able to change any of
those two states anyway. Surprised
doesn’t seem to be bad or important
enough to do anything at all either.
The discussion ended by commenting
that it would be good to have the robotdo something more helpful for you that
could actually change your mood, or
motivate you. Which was just an
indication that those two emotions are
probably not very relevant for an
artificial companion.
The bankman, a Japanese,
modern savings ‘pig’, starts
shouting and gets angry, if
nobody gives it money.
FIGURE 43 Money box withpersonality
A robot, with the qualities of a
knight, was what a participant
from the second session
envisioned.
FIGURE 44 Vision of a robot
Results life. Meaning could be in the form of do on their own. It seems that Turkle is own interests and mind although he
62
Envision
5.2.3

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 62/130
In a meta-analysis level, all post-its
were collected and re-organized, in
order for the bigger picture to be
revealed. It is easy to see that people
can contradict themselves, but theyconsciously know what they don’t
want, whereas determining what they
do want is much more vague (see Figure
45). They don’t want someone that will
bug them, as an artificial companion, or
someone that would be too close and
constantly around them.
It seems that they imagine themselves
having the opportunity of a much more
friendly relation with a companion
than would give some meaning in their
sharing experiences, feeling cared and
able to care back, sharing stories/
secrets, being over the comfort zone
sometimes, learn something new, do
something new. Anything that could
light up your routine, providestructure but not restrain you ‘too
much’.
They described their vision on artificial
companionship as having the ‘feeling
of another existence‘ without having to
worry to much for behaving within
boundaries, or with the fear of being
judged for not being ‘good enough‘
and without having that presence linger
on for a prolonged period around them;our friends usually also have things to
right after all, we do live in a time that
people want to feel connected but not
too intimate [B06]. For baby boomers
independence is something they grew
up with, and it would be indeed too
difficult to just tell them want to do. Thatis if you want to design lost-lasting
relation between a person and an
artificial companion.
Another important thing that would lead
to long lasting interest is what people
expressed about the ingredients of an
artificial companion. Most of the
literature advocates [C04] that
companions should act within the
(social) norms by being appropriate in
responses, agreeable and ‘good’ in
general in order to contribute to the
owners well-being. It seems that in
order for a relation to last longer and not
become a burden, or just a boring one,
we are attracted most by those that are
a bit odd. Not too much, just enough to
mess up a bit with our comfort zone and
our daily routine. Having someone that
always acts in favor of you is so
predictable, boring and a sign that you
are not really alive (you would have
probably said the same even for living
people). Participants outlined the
characteristics of a companion as one
that has vulnerabilities, is not perfect
as it would make you not feel safe or
your self, it leaves traces of having its
would be dedicated to you in case of
need.
One thing that I didn’t expect and
surprised me much, was that people
don’t want to deal with ‘heavy’ issues in
a ‘heavy’ way. If you define loneliness
as a problem you should take care of
not handing it with so much
‘seriousness’ making it seem even
worse. In order for balance to be
maintained participants felt that humor,
provocation and even self-sarcasm
should be present even though it looks
like you are not dealing with the
problem seriously.
Last, but not least, in literature there is
extended discussion on whether an
artificial companion has to be useful in
functionality. In some cases, performing
useful tasks, it is even part of the
definition of what an artificial companion
is [J27]. I would say that people want
something that would have an obvious
(positive) effect on their mood, or if that
is not possible to not be bugged and feel
they need permission to not be happy for
a while. Besides realizing how having a
companion is, in total, beneficial, having
a companion that is able to offer some
useful services shouldn’t be a necessity.
People described their pets as the best
companions a man could have, and they
are not per sé ‘usable’.
FIGURE 45 What people don’t want from a robot
63
Envision
FIGURE 46 Gathering all companionship ingredients
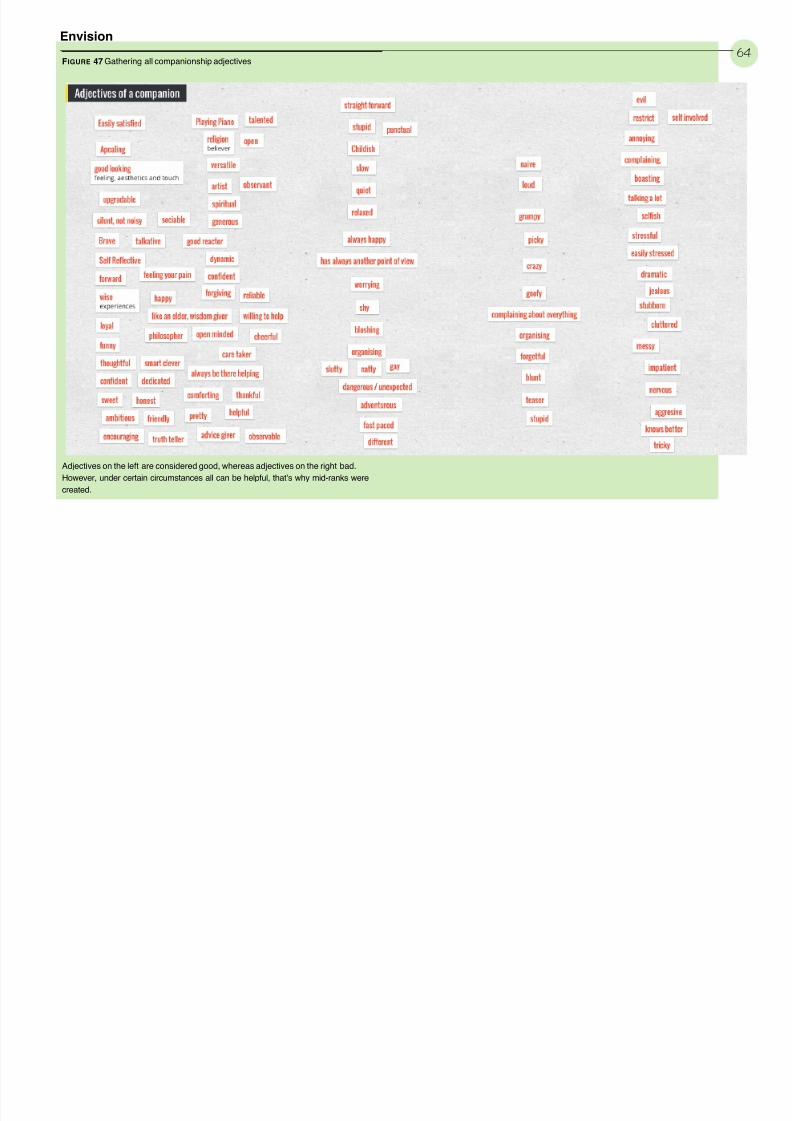
8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 63/130
Post-it notes from all three sessions followed the same patterns and moved around
the same notions. Some post-its were the same in more than 3 copies (all sessions
and more than one person per session had the same ideas)
64
Envision
FIGURE 47 Gathering all companionship adjectives

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 64/130
Adjectives on the left are considered good, whereas adjectives on the right bad.
However, under certain circumstances all can be helpful, that’s why mid-ranks were
created.
65
Envision
FIGURE 48 Gathering all personas

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 65/130
Personas from the 1st session are the most elaborate, provoking and funny. From
the 2nd session they are still interesting but a bit more serious. From the 3rd one, the
collaborative result is quite boring.
Creative session Session Planning diverging, when it would be time to
converge The artificial companion5 3
66
Envision
5.3.1

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 66/130
5.
4.
3.
2.
1.
RQ5.
RQ6.
towards future
functionality
In the second round of creative
sessions I had a semi-developed
concept already. However I was still
wondering how can we refine a future
vision, and what can be done in order
for a complete concept to be built. I was
sure about what the ingredients of a
companion are (artificial or not), but I
wasn’t sure how that translates to tasks
or behaviors. I was basically looking for
things I have possibly missed so far,verification of the basic building blocks
of the project. Reflecting back to the
research questions, they are still the
same ones with the previous session:
What are the important
‘ingredients’ for an artificial
companion? How can we
translate a vision of them to
behavior of an artificialcompanion?
What are the important aspects
of supportive behavior that need
to be realized in an artificial
companion against loneliness?
What changed now is that the
participants can get a different level of
abstraction as input. For example there
can be certain directions about the
ingredients of an artificial companion, or
a first version towards a vision.
Therefore emphasis is put in how to
transform everything to behavior, and
how it can become clear that such a
companion has benefits by providing its
company.
The final outcome of the session is not
a vision anymore, but a concept
proposal. As with the vision session,
and any other CF session, the quality of
the end result is not expected to be a
great design, or a great idea [B10].
Since time of a session is limited the
main insight is not what participants
present in the final five minutes, but
what they explain about it and how they
got there.
For this session I was not the facilitator,
but I did provide guidance along the
planning phase and was present during
the facilitation to document the process
and discussions. I didn't participate, as
it would create too much bias, but I was
answering questions or bring back to
track misdirected discussions.
In order for the facilitator (Laura
Engelshove, strategic design student at
TuDelft) to be able to plan her session I
created a one-page description of the
problem area, the goals of the projectand the wanted outcomes of the
session in particular. She compiled a
draft session plan that was approved by
me. The session was conducted by
Laura as a final requirement to her
course “Creative Facilitation”, therefore
I was not involved in finding
participants, arranging the time and
place, etc. The session would last 3
hours.
The participants would get a basic
criteria set but not the current state of
my ideas/concept so that they are able
to diverge on their own. They were
provided with the following information:
The target group of the project:
Retired people of age 50-70
years.
The problem area of the project
is the prevention of loneliness in
the target group.
In order for not to be biased from the
beginning, criteria on artificial
companion would be given after
converge. The artificial companion
enables:
The senior to discover its
personal story, helping him to
make up his mind about whathe/she wants in life
The senior to generate ideas on
possible things to do/tasks
Motivation to achieve goals or
dreams
The session followed a generic diverge-
converge scheme. In more detail the
tasks would be:
Sensitizing Participants
Analyze the problem area
Brainstorm Ideas
Clustering and discussing
Selection of main ideas
Concept creation
5.3.
67
Envision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 67/130
Sensitizing Participants
In order for the participants to get into
the right mood for the session, anappropriate icebreaker was selected.
Everyone had to introduce themselves
by saying their name and what they
would dream of doing when they
retired. After that they should say the
names of everyone that already said
their names before them plus what they
will do when they retired too.
Analyze the problem area
Continuing after the funny, yet to the
point, sensitizing part the problem area
would be defined by a technique called
‘flower associations’ [B10]. Basically this
technique is very similar to any other
association technique (e.g. the plain old
brainstorming), only that you start with
a specific word or notion and you gather
relevant notions around creating a
flower. It is based on the fact that our
knowledge consists of a network of
many things in our mind but if they
haven’t been triggered recently they are
unreachable.
Association techniques ask you to bring
everything down related to the initial
word/concept. Usually the first 10 things
are obvious, but the rest are becoming
more individual based on experiences.
A pool of relevant words was created for
two things:
free time
(how you spend with things you
like)
retirement
(what are the challenges)
Brainstorm ideas
After having analyzed the two central
terms the participants are called tobrainstorm by brainwriting possible How
To’s they would like to investigate into
more. Then merging, if possible, or
clustering of them occurs in order for
the team to select which of them would
be the ones to continue with.
With 5 H2s, a technique called ‘dynamic
brainwriting’ takes place. Every
participant will brain write down relevant
things replying to the H2s for 5 minutes.After those 5 minutes, they switch
places and answer the next H2. This
continues until all participants have
answered every H2.
A small presentation takes place on
how every H2 was tackled and then the
usual clustering and grouping takes
place.
Selection of main ideas
The clustering of the H2 will lead to the
selection of the most interesting ones to
be used as ideas. If ideas are not
enough (in numbers or quality) more
input can be incorporated by introducing
another chain association using
seemingly irrelevant words in order to
trigger more creativity.
Concept creation
The last half an hour the participants
will work as a team, using everything
generated so far in order to create a
concept. The concept will be presenting
with a poster in a small presentation
setup.
Facilitation The team wrote down the following H2
in order to continue:
The selected H2s were developed
further via brainwriting. The team was a
cats that could enable you into meeting
new people. It would be able to sooth
68
Envision
5.3.2

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 68/130
!
!
!
!
!
After the sensitizing the participants
were already in the right mood for
brainstorming. The areas analyzed, free
time and retirement brought up quite
expected results. The interesting thingto mention is that despite the different
initial point the notions generated out of
this session were quite similar to what
was generated in the previous three
sessions on companionship.
Somehow free time ended up being
defined completely by ‘friendship‘ and
things you enjoy doing that do not really
require much effort (besides sports
perhaps). In general the words thatcame up were revolving around sports,
relaxed activities, leisure, learning new
things, traveling, and enjoying food-
drink with friends.
On the other category, the retirement,
participants associated a lot of ‘heavy’
notions to it. Categories ranged from
physical consequences from dying to
becoming disabled, and emotional
consequences from having no purposeto feeling lonely. It is remarkable to see
how prejudiced young people are about
retirement and old age, exactly like it is
mention in the literature [B07].
Retirement directly marks the end of a
person’s life, like there is nothing else
between retirement and death.
H2 give the feeling of doing
something active without too
much effort
H2 still develop personal skills
after you are retired
H2 make the learning process
easier
H2 avoid to forget things
H2 stimulate friendship
H2 overcome the barrier of
starting a new hobby
H2 keep someone company
H2 not feel alone
H2 become someone’s best
friend?
H2 make a product trustworthy?
H2 react on overwhelming
emotions?
g
bit low on ideas, and by reflecting on
the overall flow of the session I think the
main reason was that it was too long (it
was actually double the time from the
previous sessions). Therefore
associations were a bit shallow. The first
H2 (develop personal skills after
retirement) was mostly answered in a
do-what-you-like way and start new
hobbies. Which was already another
H2. The barrier of starting new things
was answered in making new friends
and having reminders/motivation by
them. Which again, was interrelated
with the H2 of not forgetting things.
Perhaps the most interesting remarkwas that the participant translated
“companionship” into “how to make a
product trustworthy” and the whole
situation of being overwhelmed by a
new state in your life (retirement) to
“how a product can react on
overwhelming emotions”. The first one
was expressed using a lot of things that
are mentioned in the previous session
as well, like “be there when you need
it”, or “share personal stories”. The
second one was dealt mostly by the
idea that a product will play soothing
music back to you.
The conceptual result of the session
was a vibrating cat (see Figure 49) that
would be tactually connected to other
p p
you down in case it tracked from your
emotions that you are sad or stressed
by soothing sounds. Moreover it would
act as reminder to things you told the
cat you want to do (given that people
usually tell a lot to their cats).
Although it sounds absurd and quite
futuristic, a lot of those functions are
already present in current artificial
companions, but participants were not
sensitized in that direction on purpose.
For example Paro, the robotic seal, is
indeed supposed to calm you down by
cute, soothing reactions to your touch.
A vibrating cat was the result of the
CF session
FIGURE 49 Vibo
69
Envision
FIGURE 50 Creative Session no.4
Towards trustworthy, friendly ‘products’

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 69/130
Interaction design | Strategic designstudents
Participants
FacilitatorLaura Engelshove, Strategic design student
Results
70
Envision
5.3.3

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 70/130
Besides observations I made during the
facilitation of the session I judged there
would be no further insights by
thoroughly gathering all post-its in an
attempt to analyze them again. The
main remarks I kept from the session
directly, were:
Young people associate things
that they like doing to friends.
Few times friends are not
associated if activities, like
sports or other hobbies for one
person, are implied.
Young people have a bit of
distorted view on retirement and
what it means. Life seems to
end in retirement and all of the
sudden there is no purpose.
They are both extreme, one-sided
views, but they do contain trails to
facts. In the first generalization
friendship and having a good time areconnected in a quite obvious way. It is
true that people prefer things that
require low effort and give ‘easy
pleasure’ (hedonic). Socializing is an
easy source of happiness. When we
want to pursue personal growth goals
things are different and require a lot of
effort (eudaimonic) [C04]. Note how
participants used quite interesting
wording in the H2 for acquiring new
hobbies when retired: “H2 overcome the
barrier of starting a new hobby”,indicating there is an initial threshold
that seems quite high.
On a meta-level of reflection the most
interesting thing to consider further was
the whole connection between artificial
companionship that has to ‘stay a
product’, which even appeared in a
post-it note (see Figure 51). Although the
end concept was a cat, the participants
discussed that an artificial companionshould still be a ‘common product’ and
not something that would remind you of
a human as it would be too weird to
connect to something like that. On the
other hand they were aware that you
cannot expect a mutual involvement, or
a long-lasting interest to a relation with
a robotic cat. One of them also said that
he had a Furby once upon a time and
he got bored of it within 10 minutes. But
they were not sure how they could
approach the design of ‘something’ that
is a product, not ‘too’ human but it is
able to give you a purpose in life and
motivation. It is contradicting to see that
they suggest the product should have a
personality or that you could give it a
name (see Figure 52). Another sign of how
people can easily name what they don’t
want whereas how much confusing it
becomes to be conscious about you
would want.
The most interesting discussion was
around how you can trust such kind of
product in order to consider it your
companion. They almost build their own
point of view on how you should
become over ‘stages of friendship’. In
real life you cannot buy a friend, nor you
can directly make your friend someone
you met. There are a lot of steps in
between. It is like a taming process.
First you just meet, then some time isspend and the relation is ‘upgraded’ to
an acquaintance. In the beginning it is
probably about having fun. In a later
stage it is about proving that you can be
there if needed from both sides. The
participants translated this to how a
product can become ‘trusted’ by getting
it involved in things that give you a
purpose. Like reminding you of things
you said you would do (and then you
didn’t). That functionality seems to be
what a human would do, or your friends
in that case. Therefore the real insight is
that the interaction shouldn’t remind you
of a human-human interaction by
making clear where is the line between
a product and the living beings.
Post-it note from the session
FIGURE 51 “Keep it a product”
Post-it note from the session
FIGURE 52 “A product with a name”
Creative session Session Planning Analyze the problem area
5 4
71
Envision
5.4.1

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 71/130
4.
3.
2.
1.
RQ5.
RQ6.
towards future
interactions
This is the final creative session of my
project and had as a goal to focus on
envisioning interactions and
implications of those. It was conducted
the same day with the previous one,
and the initial goal was to use the
output (result and some of the
brainstorm post-its) as an input, so that
participants can already start from a
specific point. However, since the
previous session was a bitunderdeveloped in terms of diversion
the diversion part was repeating and
the whole idea was aborted. The same
research questions apply to this
session, with emphasis in interactions:
What are the important
‘ingredients’ for an artificial
companion? How can we
translate a vision of them to
behavior of an artificial
companion?
What are the important aspects
of supportive behavior that need
to be realized in an artificial
companion against loneliness?
For this session I was not the facilitator
either, I did coordinate the planning of it
beforehand, so that the two sessions
have different focus and outcomes. I got
a bit more involved within the session in
giving directions, besides documenting,although I was not a participant so that I
don’t influence that much.
The goal was to focus on the
interactions without dealing with the
functionality, but dealing with the
scenarios in a ‘scenarios follow
interactions’ manner. I’ve put more
limitations than criteria and mainly that:
the artificial companion cannot
speak
Therefore interactions should be dealt
via other communications means.
All the rest of information were the
same with the previous session.
Niké Jenny Bruinsma, (interaction
design student at TuDelft) was the
facilitator of this session. The session
was conducted by her as a final
requirement to the course “Creative
Facilitation”, similarly to the previous
session. It lasted 3 hours too.
The outline for the session was:
Sensitizing Participants
Analyze the problem area
Exploring Interactions
Selecting and discussing
Scenario creation
Sensitizing Participants
The sensitizing part was planned to be
an icebreaker. This time everyone had
to share a story of their childhood where
they remember something of their
grandparents. A more detailed
description of the attributes that
characterize the nature of the artificial
companion will be given after diversion.
The central brainstorming axis will be
loneliness in retired people. The
technique used was brainwriting with
small iterations trying to answer the
following questions:
Assume an ideal solution is
possible: what could elderly do
that they cannot do today?
What has prevented the
problem from being addressed
properly till now? Why are
current solutions not working?
Answering to those questions would
lead the participants to formulate an
opinion, as a group, by completing the
sentence ‘So, the problem is .... ‘.
After a problem statement is formulated
it will be revealed to the participants that
the ‘ideal solution’ that we were
mentioning before is an artificial
companion. Characteristics on the
artificial companion will not be part of
the brainstorming, but rather a
discussion after the description of them.
It is described that it is an artificial
companion that can ‘read your
emotions’, is not able to talk and has an
equal relation with the retired person,
helping him to stay motivated.
5.4.
Exploring Interactions Facilitation
Aft th it ti t l iti i
Results
D it t h i di tl f l
does aging have to be a bad thing?”
From this question the discussion
i d ff t d fi di h th
72
Envision
5.4.2 5.4.3

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 72/130
In order to explore interactions based
on the above details, the ‘silent game’
will be used. Basically it will be a role-
playing game where few scenarios will
be acted out by 2 people, one being theartificial companion and one being the
owner of it. The audience will observe
and reflect on the performed
interactions. This method is often found
as ‘robot theater’ [C04].
The owner of the artificial companion
will not be aware of the scenario that
they are performing. Instead he would
be asked to understand what the
artificial companion wants to say,without being able to talk. The audience
will take notes on how information was
communicated.
Selection of main ideas
By selecting interesting parts of
everything that took place in the
session the participants will be asked to
make their own scenarios.
Concept creation
The last part of the session is to act-out
few scenarios using dolls.
After the quite sentimental sensitizing
participants engaged in a very serious
discussion about the obstacles people
face while growing old. Initially, as
expected, the first round of problems
noticed revolved around physical and
mental deterioration. However in the
next rounds of brainstorming, by writing
down the most important points, they
were brought to the conclusion that we
are our own enemies, putting obstacles
on our selves while growing older. The
problem analysis phase ended by the
participants constructing and
summarizing the whole discussion into
a sentence.
From that point on the most interesting
part of the session began, the robot
theater. For this part the facilitator
prepared small scenarios. One person
would be the robot that would have to
communicate one small task to the
owner of the robot without talking. Then,
the participants would analyze the
involved interactions and comment on
how the task was communicated. Thescenarios were simple, such as: asking
the owner to get dressed in order to go
for a walk, or announce that
grandchildren would visit later. Finally,
the session ended with a new round of
conversation regarding interactions and
future problems noticed.
Despite not having directly useful
insights for my conceptualization, this
was the most inspiring and provoking
session.
The main remarks I kept from the
session directly, partly similar to the
remarks of the previous session, were:
Young people tend to think
about aging in a very ‘heavy’
way. It seems so distant that we
imagine the future to be very
dark and difficult.
Interactions, when limiting the
opportunity to communicate
intention without using the
verbal channel, become plain
body language. Which is
probably not the desired
interaction we want from an
artificial companion.
Regarding the first point, it was again
very obvious that people fixate easily on
the physical and mental deterioration
that aging brings. However I was glad to
see an unexpected turnout in the
discussion when someone questioned,
as if thinking aloud, “if you exclude the
physical deterioration that affects the
mental processes too sometimes, why
spinned off towards finding whether we
are the obstacle in this ‘heaviness’ we
see around aging. The participants
concluded that part of the problem is
our attitude, perception of the world,
mismatch in habits, acceptance that we
change, insecurity, misunderstanding,
and, above all, no openness, especially
in the current old generation, for new
things that can lead to a balanced aging
process. They constructed the
statement “so, our problem is that old
peoples’ passive mindset, keeps them
from indulging life!”. Which made very
clear that despite the health problems,
the loneliness, the comparison betweenwhat we used to be and the fear for the
future, the key to the solution is an inner
process of becoming more open.
The second remark, derives from
observations during the robot theater.
The participants, those that were
involved in the enactment, were
reflecting that it was very awkward to
communicate something without words,
and quite funny. The more the ‘robot’-participant couldn’t communicate exactly
what it was meant to be communicated,
the more the ‘owner’-participant
observed that the body language was
overly exaggerated to compensate for
the loss of words. The audience was
able to reflect even more on this.
73
Envision
FIGURE 53 Creative Session no.5
The ‘robot’ theater:
2 performing, 6 observing

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 73/130
Interaction design | Strategic designstudents
Participants
FacilitatorNiké Jenny Bruinsma, Interaction design student
Interaction Vision5.5.
74
Envision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 74/130
They soon realized that there is a
pattern on our communication. For
example, if the robot wanted to
‘activate’ the elder to do something,
then it would imitate the action of vividly
walking towards the door. The owner
kept on asking, using words, if the
meaning he/she understood was what
the robot meant, and the robot would
reply nodding the head upwards of
downwards. Besides body language,
pointing with finger, the participants
observed that there would be no real
communication between a person and
a robot because, when words are not
used, we rely understanding on our
gaze with a certain way that implies
intention (rapid actions, emotions that
can be seen in our eyes, and in the
muscles around our eyes). Forexample, if someone goes towards the
window, take a look outside and then
quickly open his/her eyes open and
move towards the door, we will
probably think that someone is visiting
him/her at that moment. The most
crucial conclusion of this robot theater,
is that the insights can be contradicting
when used in real situations or human-
robot interaction. If we try to implement
all this body language, facial
expression, and, subtle gaze
movements in a robot, it means we just
injected the robot with the most
anthropomorphic behavior we could.
From that moment on people will
unconsciously treat that robot as a
human being, and not as a product,
which results in awkward situations and
unwanted designs. On the other hand
we’ve learned that whatever has a
screen, has a graphical interface similar
to a computer’s interface. So we expect
to see buttons, images, and text. On a
reflection level the participants
discussed that having a robot that
behaves more like a product and lesslike a human being is less stressful.
During the theater they experienced
that a human-alike behavior would lead
to having someone following you
around the house, which seems cute in
the beginning, but a burden after a
while.
Summarizing the insights from the
conducted participatory workshops the
interaction vision begins to shape up of
a future interaction between humans
and robots.
The relationship people, digging into an
unconscious level but also in a
conscious level, it would be desirable to
have the following characteristics:
Be an equal relation, as much
as possible.
Not too intimate, yet close,
mutual in reciprocity and close.
Not perfect, yet not too human-
alike.
Long-lasting effect, not tiring,
keeping the interest alive.
In order for this vision to happen, the
following considerations should be
taken into account:
As far as equality is involved, many
current artificial companions take
advantage of a baby-human or pet-
human relation which requires from the
person to feel the other side is
incompetent to take care of its own self.Having an anthropomorphic or
zoomorphic representation doesn’t help
in this situation. The vision is to adopt a
visual representation that doesn’t
predispose people to act in this way, but
in a neutral one. Moreover it would be
desirable the robot to exhibit a state of
having its own mind. This way it will not
result in having a robot that follows you
around in order to satisfy what the
‘master’ wants. Having an own mind,
not being always in accordance to what
we are instructed to do, gives the
person the impression that this relation
is equal. Too much obedience directly
gives the false impression that we are in
charge.
At a latent level, during the workshops,
participants revealed that they wouldn’t
like something that would be too
intimate to them, knowing more than
they would like to reveal themselves.
This is a non-safe interaction zone.
Trust and proximity (physical, but mainly
emotional) should have steps, as any
kind of relation. Trust is something that
should be earned, and the metaphor of
taming came along. We don’t really
5.5.
3.
2.
1.
4.
tame products, nor robots in that
matter, but friendship is a bit like that.
We test the other person by doing
Interaction Goal5.6.
75
Envision

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 75/130
We test the other person by doing
something and expecting their reaction.
Trial by trial we go a step beyond the
previous challenge.
Many times it became apparent that we
tend to think too negatively about
aging. However, after reflection, people
expressed preference over a
ridiculously humoristic companion, over
a serious one that would constantly
remind them what is right and what is
wrong. Especially in the first workshop
participants envisioned a whole world
of imperfect attributes that would result
in a balanced final behavior. Despite
not wanting human-alike behavior, as it
triggers uncanny valley effects, keeping
some imperfections or extreme
characteristics doesn’t seem to evoke
overly realistic behaviors of an android.
In contrast it just seems to make them
more approachable, mortals like us,
and easier to get accepted.
Last but not least, the optimal relation
should be a lasting one. Many of thecurrent artificial companions are
reported to make people get bored of
them within few hours. Companionship
is not a notion to last just a few hours,
new things should be explored so that
the interest is kept alive and the relation
will grow.
In a glance, the project aims to help
people while aging by preventing
loneliness. A first impression, and
logical inference is that the opposite of
loneliness is to connect people.
However, combining literature findings
and the insights from the workshop I
would actually argue that the opposite
of loneliness is feeling alive, having a
purpose, inner will and wants, not just
being socially connected. Especially in
cases of emotional perceived
loneliness, the ‘cure’ of bringing people
together and make them connect
doesn’t seem to have an effect if there
is no inner will to connect. When
interest is lost, we all feel lonely. On the
other hand, if we are completely alone
but engaged with activities that satisfy
our personal needs we don’t feel lonely.
Therefore the goal is to keep people
active, in a way that would make them
feel satisfy. In order for this to happen,
keeping the support to many different
options seems to be necessary, as we
don’t all want the same things. Somepeople might indeed feel alive by being
social connected, and that might be one
goal of personal growth for them. Some
other might feel alive while learning new
things, compensating the feeling of
existential loneliness while growing
older.
Taking a look back at the conceptual
framework (see Figure 54), the specific
goal is to help people that do not act ontheir own, by supporting that process
with an artificial presence’s motivation.
However, that doesn’t mean that the
rest of the categories will not benefit
from such a motivational aid. Sleepers
and daydreamers have trouble putting
their thoughts into action, and the main
research question is whether motivationboost from a robot is enough.
Nevertheless, since the framework is
dynamic, and a sleeper might transform
into a sheep from time to time, the
question remains the same for all.
5.6.
FIGURE 54 Conceptual Framework, focus
Supporting inactive people become active
!"#$%&
'!(($%&
')*'+(&,&(( ')*'+(&-), sheep planners
sleepers daydreamers
motivation
personal goals personal goals
motivation
personal goals personal goals
motivation
motivation
Ideate
8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 76/130
iiiIn this part the ‘squiggled’ road
to conceptualization is
presented; from unveiled
opportunities, to low-fidelity
prototypes. Participatorymethods were used, adopting
an experimental approach for
the development of the initial
ideas. The byproduct of this
phase is the concept that
derived from the explorations,
gathered insights, and
participants’ feedback.
77
Ideate
Buddy

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 77/130
Creating the concept has been the most challenging step in this project,
or perhaps should I say steps. There were many iterations within this
iteration of conceptualization and many times I moved back from getting
feedback to fix the concept. The usual approach of ideating by creating
three proposals didn’t work. Instead, the concept was evolved by
adopting a central idea, the metaphor of a coach, and developing it
further by explorative prototypes.
yTowards an artificial companion
6.
Chapter Overview
6.1
Iterations Overview
6.1.1 Suggesting tasks
6.1.2
The cards exploration
6.1.3 Small bored robot with sound
6.1.4 Big bored robot with animation
6.2
Final Proposal
6.2.1 Embodiment & features
6.2.2 On a service level, befriending stages
6.2.3
The role of emotions, a machine state
6.2.4 Storyboard of use
78
82
80
81
81
82
87
88
89
79
Iterations
Overview
I realized my approach was not the
most appropriate one since I barely had
a clear view on the topic and what
used in later stages (although the
distinction might be hard to make) in
order to “test, receive feedback and find
78
Ideate
6.1.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 78/130
Overview
A common approach that it is often
advised to follow within the studies at
TuDelft, is to create three concepts. Arumor in the circles of professional
studios is that this helps the clients to
have the opportunity to select the best
fitted one, and one the other hand for
the design studio to promote the one
they think it is the right one. This
happens by proposing a ‘bad, a wild, and
a good one, the one we want to be
selected’ concept. However this
approach failed miserably in my case (see
Appendix 3). By trying to ideate three initial
draft ideas after literature review, all
ideas seemed a huge step that didn’t fit
and didn’t have potential to get evolved.
people want. I thought I should try a
more service-alike approach, where the
concept is evolved using one small bit
to begin with and is built up, adding
insights by insight, using explorations
via prototyping [B19]. Explorational
prototypes are meant to “generate
insights, develop your thinking about a
situation and gather insights”. Whereas
evaluating prototypes are meant to be
fail-points” [B19].
The initial starting question, taking into
consideration the conceptual
framework, is what does those people
need, or how do they differ? For
example what it is that a planner makes
different compared to a sheep, or how
could we reverse the process for a
planner to find the answer?
Evolving the notion of an artificial coach by trial-and-error explorative prototyping.
FIGURE 55 Iteration steps
Prototype for exploring Prototype for evaluating
Assign tasks Card Tasks Bored Robot Big Thinking Robot Capturing Reactions Young participants Test Older participants Test
From the observation that planners
have structure, on how to reach their
goals, the initial sparkle of the concept
Suggesting
tasks
proper way. The social presence was
no-where present in the experiment,
and it was just me asking things to
79
Ideate
6.1.1

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 79/130
was born. Buddy would be the
metaphor of a coach, that can offer
people:
Structure to bring down goals
from un-realistic to realistic
pieces,
Reflection in order to realize
how you feel about certain
actions,
A small motivation boost to havereason to start with your goals,
A framework to hold on to and
make goal-chasing a routine to
be easy to follow, open-ended,
and up-to you to decide the
pace.
Suggesting tasks, was the first
exploration towards a fuller concept.
Perhaps the quickest exploration ever,
because it failed before it even started. Itried to engage people by sending them
tasks (that I knew people wanted to do
anyway), but there was no will in
following. The criticism on that was that
the setup of the experiment was not in a
people, in the eyes of the participants.
Moreover by simply suggesting tasks I
intended to help people at a ‘sleeper’
stage, but I made it difficult for anyone
else to participate by not giving the
chance to create their own tasks.
Therefore I proceeded with the second
exploration, the task-cards.
FIGURE 56 Conceptual Framework, missing links
Planners
Sheep
Daydreamers
Sleepers
They have structure.
They need reflection in order to figure
out why they follow and what they like.
They need a push to start acting
towards their dreams.
They need to reflect and act in order to
find things they like and keep doing
them.
FIGURE 57 Attempt to assign tasks to sleepers
The cards
exploration
However you had to reflect on the cards
the opposite way around, starting from
feeling out what would you like to
One participant dropped out of the
experiment not being able to write
anything on the cards that focused on
‘ ‘
the goals should be written down at
your own pace, and at no point should
you feel obligated to follow the card.
f
80
Ideate
6.1.2

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 80/130
This exploration took place with 3
young participants. The participants
were given a kit of cards that would
allow them to break down a long-termgoal into pieces for short-term action.
The kit had cards that asked you to fill
in the sentence:
“I would be happy if I could
________________________
Today,
Tomorrow,
This week,This month,
This year”.
achieve in the long-run, returning step
by step to what can you do today.
The results were really interesting. All
three participants had a difficult time in just starting the whole assignment by
staling on what the ultimate goal could
be. One of them told me “if I write it
down, it is real!”. That was the moment I
decided that writing down is part of the
final concept, because you cannot
easily erase things you wrote down, it is
a bit like betraying yourself. So this is
something that puts your goals into the
‘conscious’ zone of your mind. It
seemed like you needed to commit to
yourself that you will start acting if you
write it down.
‘what to do today’, or ‘tomorrow’. That
might be because all three of them
chose really bold long-term goals and
we are not used to plan how can we
reach our goals by reversing the way of
thinking and splitting it into smaller
goals.
From the rest of the two participants
that continued the test one of them
stopped in the middle of the week,
feeling it was too much pressure to
think over his goals every day. However
that was a problem with the
visualization with the cards (they had
numbers 1, 2, 3, and he assumed that
they meant to write down something
everyday). But that was not the point,
That wouldn’t be the objective of the
concept.
However the other participant didn’t see
it that way, and he told me that heskipped the task somedays. The
problem with him was that the task was
not over and he had to do the same
task for many days. The interesting
thing is that every day he wrote down
the same task, but in a more articulated
way.
A funny observation was that one of the
participants have put the cards in the
mirror of his bathroom. He said “it was
the perfect place to see them fresh in
the morning, so that he can reflect”.
FIGURE 58 Attempt to give structureto daydreamers
FIGURE 59 Results from one participant of the task-cards
Small robot
with sound
The results were again both surprising
and interesting. Just by an animated
character with 2 frames, the sense of
‘ th ’ b i t b t i d
Big bored robot
with animation
The result of that was not encouraging
me towards the usage of any kind of
screen. People thought the robot was
“l di ” thi d th h ld
81
Ideate
6.1.3 6.1.4

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 81/130
In order to step into the ‘artificial
presence’ zone, the next exploration
had to do with a fast prototype of a
bored robot. The robot had eyes andwould observe around and he would
make a sigh sound every now and
then. I asked two participants to use
this when they felt completely
unmotivated of doing anything, in order
to test their thoughts while being
‘sleepers’.
‘another’ being seems to be triggered.
Moreover one of the participants told
me “it is like it is mirroring yourself. You
are bored, so when you see someone
else being also bored you realize you
also look that bad and you want to
change your condition”. Of course,
there was also negative criticism,
regarding the predictability of the
actions the animation performed and
that after a while you start ignoring it
because of that.
Continuing the explorations I wanted to
test how the robot can communicate
thoughts and information back to you. I
didn’t want to use any kind of UI, atleast not in the conventional way that
we know UIs in computers. I imagined
the robot can have its own abstract
language of visualization and wanted to
test if abstract shapes would convey the
same feeling (boredom) to the previous
experiment, with a different expression.
“loading” something and they should
wait. We are too used to seeing screens
with buttons and we associate the
affordances of them to any kind of
screen we see. I imagined the robot
could have its own visual vocabulary
but that would need people to train on
that vocabulary. The decision was to
exclude the screen for information
exchange and adopt a conversational
way of communicating with the robot.
FIGURE
60 Results from one participant of the task-cards FIGURE
61 Results from one participant of the task-cards
82
Final proposal
Embodiment & Features
Ideate
6.2.
FIGURE 62 Buddy aesthetic influences
6.2.1

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 82/130
4.
5.
6.
3.
2.
1.
The final proposal includes the
refinement of the concept both on a
visually representational level and a
functional level. Feedback during the
explorations were utilized in order to
reach this level of refinement. The
interaction qualities were also taken into
consideration in creating something that
would convey that it is approachable,
vulnerable, well-made, personalizable,
not in need of care, has a sense of self,
distant yet not intimate to people, a
robot yet a product.
The functions it performs, or that you
can perform are:
Have its own daily routine,
wake-up, observe the world
around, feel bored, fall asleep in
the nights, send you a message
if no-one is interacting with it for
too long.
Analyze facial emotions when a
face is in proximity and react
accordingly.
Keep track of your tasks by
keeping your inner goals a
secret. Buddy allows you to
borrow its tokens, right on them
and return them for it to keep
them as a safe-bank of goals for
future reference.
Motivates you, using a
conversational app, when you
perform short-term actions
towards your goal. Think of it
like a coach, not in doing
exercise but in life.
Keep you company by acquiring
a relation that build-up slowly
with time. Buddy is quite shy, so
it won’t let you take its tokens on
the first day. First it has to get to
know you and you to know it.
Friendships need time.
Buddy can connect to other
Buddies, so that tasks can be
shared with other people, if you
want to ask for help on
something that you cannot
manage yourself.
Visual moodboard for Buddy’s representation: modern yet as simple as possible
6
83
Ideate
FIGURE 63 Final Proposal pt.1
Buddy consists of an embodied
companion, tokens and a mobile app.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 83/130
84
Ideate
FIGURE 64 Final Proposal pt.2
Buddy reacts to token deposit of
completed tasks.
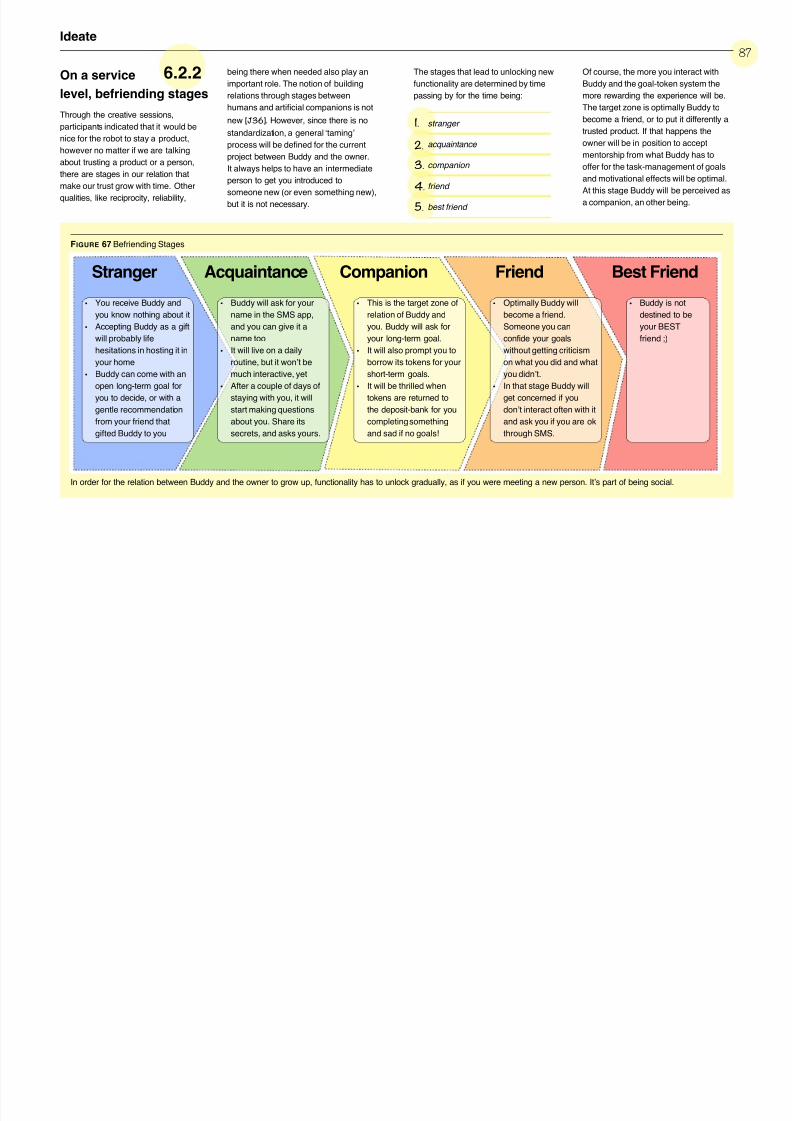
8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 84/130
85
Ideate
FIGURE 65 Final Proposal pt.3
Buddy is a social conversational robot

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 85/130
Ideate
FIGURE 66 Final Proposal pt.4
Buddy can help you have an overview
on the completed tasks, like a goal-bank.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 86/130
On a service
level, befriending stages
Through the creative sessions
being there when needed also play an
important role. The notion of building
relations through stages between
humans and artificial companions is not
The stages that lead to unlocking new
functionality are determined by time
passing by for the time being:
Of course, the more you interact with
Buddy and the goal-token system the
more rewarding the experience will be.
The target zone is optimally Buddy to
87
Ideate
6.2.2

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 87/130
3.
2.
1.
4.
5.
Through the creative sessions,
participants indicated that it would be
nice for the robot to stay a product,
however no matter if we are talkingabout trusting a product or a person,
there are stages in our relation that
make our trust grow with time. Other
qualities, like reciprocity, reliability,
new [J36]. However, since there is no
standardization, a general ‘taming’
process will be defined for the current
project between Buddy and the owner.
It always helps to have an intermediate
person to get you introduced to
someone new (or even something new),
but it is not necessary.
stranger
acquaintance
companion
friend
best friend
become a friend, or to put it differently a
trusted product. If that happens the
owner will be in position to accept
mentorship from what Buddy has tooffer for the task-management of goals
and motivational effects will be optimal.
At this stage Buddy will be perceived as
a companion, an other being.
In order for the relation between Buddy and the owner to grow up, functionality has to unlock gradually, as if you were meeting a new person. It’s part of being social.
FIGURE 67 Befriending Stages
Stranger Acquaintance Companion Friend Best Friend• You receive Buddy and
you know nothing about it
• Accepting Buddy as a gift
will probably life
hesitations in hosting it in
your home
• Buddy can come with an
open long-term goal for
you to decide, or with a
gentle recommendationfrom your friend that
gifted Buddy to you
• Buddy will ask for your
name in the SMS app,
and you can give it a
name too
• It will live on a daily
routine, but it won’t be
much interactive, yet
• After a couple of days of
staying with you, it will
start making questionsabout you. Share its
secrets, and asks yours.
• This is the target zone of
relation of Buddy and
you. Buddy will ask for
your long-term goal.
• It will also prompt you to
borrow its tokens for your
short-term goals.
• It will be thrilled when
tokens are returned to
the deposit-bank for youcompleting something
and sad if no goals!
• Optimally Buddy will
become a friend.
Someone you can
confide your goals
without getting criticism
on what you did and what
you didn’t.
• In that stage Buddy will
get concerned if you
don’t interact often with itand ask you if you are ok
through SMS.
• Buddy is not
destined to be
your BEST
friend ;)
FIGURE 68 Buddy’s machine state of operation
The role of
emotions, a machine
state
88
Ideate
6.2.3• Motivation
• Energy
E i
Buddy’s core stats:
• Fall Asleep
energy ++

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 88/130
2.
1.
Buddy has a basic set of ‘core stats’. Its operation is also affected by external variables like: time passing by, time of the day,
environmental triggers (like face detection).
state
Utilizing FaceReader’s valence
readings from the person’s face (that
can happen either through Buddy or
through the mobile phone’s camera
while using the app), Buddy will adopt
two stances:
artificial sympathy
artificial compassion
In the first stance it will react like amirror to the person’s emotions. So it
the person has positive emotions, a
positive state will be triggered. (So
Buddy is sympathetic towards us)
In the second stance it will react in the
exact opposite way. Friends are not
always affected by our mood, even
though they understand our position.
Instead they try to cheer us up. It might
also be the case that our friends are in
an unmotivated mood and we should
cheer them up instead. In those cases,
Buddy will adopt an action-opposite
reaction from the scheme. (So Buddy is
showing compassion, but is not
affected too).
IDLE
SLEEP
DAYDREAMMOTIVATED
PLANNER
• Experience
• Time spend on each state
BORED
• Send SMS of suggestedtasks for the owner
• Send SMS of dreaming ofBuddy’s tasks
• Ask if there is
anything going on• Present overview of past
tasks, send reminders
energy ++
energy --
motivation ++
motivation --
• Observe
motivation ++
energy ++motivation ++
energy ++
motivation --
energy --
motivation --
energy --
motivation ++
energy ++
motivation --
energy --
energy -- motivation ++
energy ++
motivation --
energy --
Storyboard of
Use
Buddy can have a standard routine of
goal, the interaction with Buddy
happens via the SMS app and the
tokens. Each token represent a short-
term goal, and can be stored within
B dd ki d f
Future extensions can include some
functionality for the tokens as well, like
tracking time of a task automatically
(from the time you take the token, till
i B dd ) M h
Buddy can begin with a fixed goal for
you, in case a friend has observed it
would be good for you to set such a
goal and gifted Buddy to you (for
l ‘b l f l i
89
Ideate
6.2.4

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 89/130
Buddy can have a standard routine of
using it, and some alternative ones.
Mainly, after you have set the long-term
Buddy, taking advantage of a money-
bank box. Tokens can be personalized,
by writing down reflections at the back.
you return it to Buddy). Moreover they
could be share to ‘outsource’ tasks or
simply ask helps from others.
example ‘be less stressful, exercise
more’), or come with an open initial goal
for you to decide.
There can be many different routes to using Buddy, depending on the stage. However an overall view could be the above one.
FIGURE 69 Example scenario of use
!"##$%&'#( *+,-$
!"##$ &'(( )*+,- .-,)/0+( )-1,-2) 2/ 2*-")-,3 +)4'05 6/, + )-1,-2 7+143 &*+2 &/"(#
2*- ")-, ('4- 2/ +1*'-8- )/9-#+$:
;-$3 0/& 2*+2 $/" +,- 9$
*/)23 9+$ < )*+,- + )-1,-2
&'2* $/": < ")-# 2/ 7- +1/+1*3 0/& <=9 ,-2',-#> <
#,-+9 /6 2,+8-(('05 2*- &/,(#
/0- #+$> ?*+2 &/"(# 9+4-
$/" *+..$ 2/ +1*'-8-)/9-#+$:
;-$ !"##$3 < &/"(# ('4-
2/ ('8- *-+(2*'-,> @/)2 /62*- 2'9- < +9 2// 7")$
2/ 2*'04 +0$2*'05 7"2
&/,43 &/,43 &/,4>
Hello!
I’m
BUDDY
!"#$%&'(%'") +,%-)
!"##$ &'(( ')*+,#"-. '*/.(01 &23* '* -3) #, 0,+*2. "/.+ 3)# *2. +,(. ,0 *,4.)/5
Validate

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 90/130
ivThis part is concentrated on
the evaluation steps towards a
validated conceptual
framework and concept. The
validation was an iterativeprocess itself, including the
evaluation of the concept in
two stages both on
participants of younger age
and of the target group. The
byproduct of this part is a
deeper understanding of the
acceptance of the proposedconcept.
Validate
The conceptFrom framework to proof of principle
91

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 91/130
Validating the concept is perhaps the most exciting and frightening stage
of designing for the designer. Prototyping for evaluation means that
there will be users, feedback from them and the truth will be revealed!
No matter what the designer had in mind during the process, the crash-
test is how the end-users will accept the end-result. The strong points
and the fail ones will be revealed. The intention, within the scope of a
graduation project, is not to reach a perfect end-result but to reveal thosepoints and suggest corrections/additions to the concept.
Therefore this chapter approaches the question:
Would people want to use Buddy if it were a real product?
p p p
7.
Chapter Overview
7.1
The Conceptual framework
7.2 The Concept, prototyping for evaluation
7.2.1 Planning the evaluation test
7.2.2 Young Participants
7.2.3
Older Participants
7.2.4 Insights
7.3 Prototyping for facereader usage
92
101
95
96
98
94
100
The conceptual
framework
The most valuable insight from this was
that my framework overlooked one
factor, whether the retired person was
happy with their own condition or not.
Society often makes many
retirement, inactivity was classified to
be a ‘bad’ condition. With the evaluation
of the framework it became clear that
there are cases that are actually happy
with being inactive when retiring
92
Validate
7.1.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 92/130
Part of evaluating the whole concept
was the validation of the basic structure
that it is based on, the framework (seechapter 4.2). If there are fundamental
problems with it, then chances are that
the whole concept is not very strong. In
order to evaluate the framework I
distributed a small questionnaire (see
Appendix 2), asking people to share
stories of retired people and classify
them under one of the following
categories. At the same time I had mini-
interviews with people asking the same
question just changing the format.
Society often makes many
assumptions, and the image we reflect
on the world might not be accurate to
what we feel. That has been the veryfundamental problem of emotional
isolation anyway. In the first version of
the framework, using anecdotes of how
people were perceived while and after
with being inactive when retiring,
especially if they have been working
very hard. Trying not to criticize people
for not being active, a short period ofinactivity only seems beneficial.
Otherwise, prolonged periods of not
pursuing inner wishes will unavoidably
lead to emotional isolation. Therefore,
FIGURE 70 Validated framework
Complete picture of a full conceptual framework
UnsatisfiedSatisfied
PlannersExplorers
On a break Opportunists
Routine
VictimsSheep
Sleepers Daydreamers
PurposefulPurposeless
Active
Passive
PurposefulPurposeless
Active
Passive
the framework was not completely
useless in its principle. In fact,
validating it and adding the rest of the
categories revealed its true complexity
without taking away any of its
You can notice (see chapter 4.2), that the
main difference is that I hypothesized
that what people around the retired
person perceive, reflect their actual
satisfaction of their situation However
cannot know if a planner is a bit of a
routine victim, in case he/she failed to
achieve the exact goal he had in mind or
whether he/she had to compromise.
after retirement are not neither tested in
this project nor depicted in the
framework.
Lastly, the opportunist is the satisfied
93
Validate

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 93/130
4.
3.
2.
1.
8.
7.
6.
5.
without taking away any of its
applicability to the design problem. The
full range of (new) categories can be
summarized as following:
Satisfied
The Planner
The Explorer
The Opportunist
The ‘On-a-Break’ person
Unsatisfied
The Routine Victim
The Sheep
The Daydreamer
The Sleeper
satisfaction of their situation. However
this, as emotional loneliness, turns out to
be a hidden state, known only to the
retired person. One can be actuallyhappy, or not, with belonging to any
stage of the framework. Inner
satisfaction is like there are two sides of
the same coin:
- planners vs routine victims,
- explorers vs sheep,
- opportunists vs daydreamers,
- sleepers vs ‘on-a-break-.
For example, the planners are not
always happy. I was surprised to find out
stories of people that stayed active,
purposeful, to the eyes of external
observers, but not really being happy;
the ‘routine victims’. Reality is that we
cannot be sure if an active person that
still pursues its goals after retirements
feels emotionally isolated or not. It mightbe that he/she stays active out of habit,
or out of necessity (for example if there
is a need of extra money, besides
pension, the retired person will continue
to work). We cannot really know if a
person that seems to be a planner is a
routine victim in reality. Moreover we
On the exact opposite direction, we
cannot be really sure if a completely
inactive person is a sleeper or a personon-a-break. There is a difference that
only the inactive person knows. The on-
a-break reaction is a quite natural
reaction to cases that there has been
heavy, stressful workload for too many
years, so the person actually enjoys
having all this free time, relaxing.
The other side of the sheep, is the
explorer. The sheep has no other choice
but following what other people do, inorder not to stay inactive, the explorer
does that as a result of enjoying the
whole journey and not the result of it
necessarily. It could be that explorers are
easier to get satisfied by simple things
(like just socializing and ‘being’ at a
place), whereas sheep innerly can only
be satisfied when achieving more
eudaimonic pleasures, therefore they
cannot really find satisfaction at ‘just
being followers’. Or that their
momentarily satisfaction is enough to
last over long-term goal satisfaction
[J30]. But that is a non-tested theory
over the framework, that could be true or
not. The relation between expectations
before retirement and reality outcomes
y pp
pair of the daydreamer. They are the
‘lucky’ ones. There are stories that
indicate that these people had dreamsfor the after-retirement life, they didn’t
really planned them out, but things
worked out towards that direction
anyway.
Reflecting on the whole scheme one
might also add that there is another
factor that can be involved. Whether a
person is introvert or extrovert. It sounds
quite logical to infer that it is easier for an
extrovert to be a sheep and more naturalfor an introvert to draw themselves back
into a daydreaming stance. Somehow,
maybe societally biased, we associate
action (or perceived action from our
surrounding people) with introversion/
extroversion [J33]. In any case, it seems
that the framework was able to serve its
initial purpose, simplify the transition
from researching to designing Buddy. In
the after-math Buddy doesn’t seem to
‘harm’ any of the addressed categories,
whereas does seem to be a small help to
all of them. Nevertheless, the weak spot,
is how can somebody recognize who
needs Buddy when distinction between
satisfied retired people and unsatisfied
ones is such a subjective judgement?
The Concept,
prototyping for
l ti
94
Validate
7.2.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 94/130
2.
1.
evaluation
Testing the concept was a challengingtask. There were many considerations
beforehand, such as: what kind of
people should I test it with, should they
be sleepers, young-old, how long will
the experiment last, should I test the
whole concept or parts of it, and what
kind of prototype can I use for that
purpose. After a lot of consideration the
rationale was to split the evaluation test
into two parts:
Testing with Generation Y,
Testing with Baby Boomers.
Conducting the same experiment in two
generations will give extra insights
between the differences of those two.
Moreover by applying the test first to
young people a first round of insightswill help to fix the prototyping setup for
the, provisioned, more demanding and
judgmental older generation setup. A
separate section will evaluate the
intended usage of FaceReader and the
readings that can be received during
such a test.
Finding people for the experiment
proved to be much more difficult than I
expected, especially for the oldergeneration. One tricky point was that I
couldn’t pre-screen people and
categorize them to the framework, in
order to select sleepers or daydreamers
for the experiment. Wanting to test the
long-term effect of hosting Buddy added
an extra level of difficulty into finding
people that would have free time and
will to do something like that. My non
existent connection network in older
generations within the boundaries of
Netherlands didn’t help much either.
Previous explorative tests indicated that
the framework is dynamic. So there are
points that we feel demotivated, as a
sleeper, moments we daydream without
expressing our intentions to anyone or
acting towards them, times we just go
with the flow, and times we plan-act-
achieve. Therefore, there was no point
in pre-screening people, just applying
the test and having insights at what
stage people are usually around
afterwards, instead. If there was a
motivation boost due to Buddy, then I
would simply have feedback that the
participants’ activity was increased
towards a specific goal, more than
before that they didn’t have Buddy.
Feelings of companionship shouldn’t beaffected by the framework, since it is
used just for the motivation boost.
As far as evaluating parts of the
concept or the concept as a whole, I
decided it would be more interesting to
see the aspects of acceptance, feelings
of companionship, and the motivation
change when having Buddy. Therefore
the concept as a whole process should
be evaluated, compromising or leavingdetails of it out. Creating a prototype
that could be given out for a week to
participants was the tricky part. I had
thoughts of prototyping it using
arduinos, webcameras, iphone but then
I realized that such a prototype wouldn’t
be portable and it wouldn’t last longer
than few hours before going out of
battery. The solution was to prototype
by giving to people a prototype that
would host the same functionality but
without being functional. Then people
would be guided what to do with it as if
every piece of it was representing
something functional in the future.
Eventually the final testing was
conducted with 2 generation y
participants and 2 baby boomers (bothcouples). Testing it with couples was an
interesting twist, as everyone had its
own, personal Buddy but common
feedback sessions with me. However
I’ve asked the participants to try not to
influence each other’s process (which I
knew that wouldn’t happen), but it was
interesting to see how the discussion
between the couple would evolve in the
end.
Special care was given so that even the
prototyped Buddy will emit the intended
interaction qualities in the way it is
visualized, even though it will be just a
‘sketch-prototype‘ and not a functional
one. The quality of the prototyping
should convey a ‘mortal’ robot, yet a
well-made one that would last, even
one made with care especially for the
participants. A hint of humor should be
present, and Buddy should be cute,
simple and nice as an object.
Something that would make people feel
that they can put on display within the
boundaries of their home, and not
something to trow in a drawer.
2
1.
Planning the
evaluation test
The planning of the evaluation test
ld b lit i t th h
Participants would receive the following:
Embodied Buddy prototype.
First the young participants would
evaluate Buddy, and then the older ones.
The prototype will be adjusted according
to the feedback from the first round. The
pre-test session serves the purposes of
right or wrong way of doing this, that they
should feel free to keep their own pace
of assigning tasks to themselves and
that I won’t affect their pace throughout
that week. They should also feel free to
95
Validate
7.2.1

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 95/130
3.
2.
1.
3.
2.would be split into three phases:
Pre-test session for explanations
Hosting Buddy for 1 week
Post-test feedback session
Tokens that would symbolize
short-term goals that should be
carried with them as a reminderand be returned to Buddy when
finished.
Structured writing diary-alike of
their reflections to the activities
completed.
sensitizing participants to follow the test
through discussion in a general and
more specific level. The general levelwould be about artificial companions,
and what the project is about. The
specific level would be instructions on
what it is expected during the 1 week of
keeping Buddy in their homes. It should
be clear for participants that there is no
express their opinion, bad or good, in the
post-test session. Questions during the
post-test session would include whatthey found interesting versus what they
disliked. Whether they would continue
such a process, if Buddy had an effect
on their motivation levels and how would
they feel if Buddy was able to track their
emotions.
FIGURE 71 Evaluation test
Outline of the steps a participant would make
1) The participant writes down thelong-term goal. That’s a secret!
2) Short-term goal details are writtendown and carried around as a token
4) When short-term tasks arecompleted the token goes back to Buddy
3) The participant reflects on how it feltcompleting a short-term goal
1.
Young
Participants
The evaluation with the generation y
participants was conducted with 2
“adopt a healthier way of life”, whereas
her steps towards that was:
do some exercise,
96
Validate
7.2.2FIGURE 72 Buddy prototyping for young participants
8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 96/130
3.
2.
1.
4.
5.
3.
2.
participants was conducted with 2
people at a very different stage of their
lives that brought many rich insights
about contribution Buddy can have.
The girl was between jobs, and had lots
of free time within her house, a very
similar situation to as if she was retired,
almost. The guy was working full time
and was quite busy. They were both
very enthusiastic for getting Buddy as a
gift and were fighting over who is gonna
get which one (see Figure 72). I was
surprised to find out they bothexperienced the effect of Buddy’s
companionship, in very different ways.
The girl mentioned “He has been a
good company, helping me put
thoughts into action. He was a bit silent
though, but he was there in its place all
the time”. Which was an expected
comment since Buddy was indeed very
silent. The unexpected part was to have
in her mind that Buddy was a physicalpresence that remind her of her goals
in the house, without that being
stressful or an unpleasant pressure.
She was so proud of having Buddy that
even talked about it to friends and
carried her written tokens around to
show them. Her long-term goal was to
drink more water,
include a portion of fruit/
vegetable everyday.
Her reflection on the tasks was mostly
negative (marked with orange and red
stickers), with only the ‘drink more water
task’ marked as green. She said that
she completed the tasks but felt that it
took her too much time till she did or
she wasn’t good enough at it, or didn’t
do it as often as she initially wanted.
However she appreciated that she was
acting towards a vision, and that there
were many reminders (like carrying the
token or seeing Buddy standing at the
bookcase).
The guy reacted differently to the test.
The first days of the week he has been
very busy to do anything for Buddy. Hehad the long-term goal, “improve my
dutch language skills and endorse the
dutch culture”. He kept the long-term
goal at the back of his head, not carrying
around the tokens. There were points
that he wished he had an empty token
with him, in order to write down a short-
term task because ideas were coming in
his head on occasions while away from
Buddy and his house. For example,
while on his way to work he saw a
bookstore. He thought it would be helpful
to buy a notebook to write down new
dutch words. He knew that those kind of
tasks are not really tasks, but felt very
motivated to be able to include them in
his list and have something to deposit to
the Buddy-bank (he even ranked them
with a green sticker). He was also not
very happy with goals that took him too
long and he even felt like quantifying
them. His short-term goals were:
Read the news in Dutch,
Read the news for Eindhoven
about my profession,
Buy a notebook for new words,
Write down 10 new words
Search online of a dutch course
Buddy was presented as a gift. The tongue is separated to pieces-tokens.
97
Validate
FIGURE 73 Evaluation test no.1
Giving Buddies to young participants to
live with them, for one week.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 97/130
Accepting Buddy to the house
Participants
Older
Participants
The experiment slightly changed for the
older participants Since Buddy has
to the personal notes someone takes
for themselves. The tokens were also
separate, in order to change their
physicality from paper (that was in the
previous test) to something that can be
i d d
98
Validate
7.2.3FIGURE 74 Buddy prototyping for older participants

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 98/130
older participants. Since Buddy has
been so ‘silent’ in the previous round
with the young participants, I decided
that one of the two older participants
will communicate with Buddy in an
SMS-alike setup. So one of the would
report the long-term and the short-term
goals through SMS to a contact named
BUDDY (or named under a name they
would choose). On the other side of the
line, it was me, with pre-fabricated
motivational SMSs. I wouldn’t really
reply to the actions and reflections of
the participant but I would rather givelines that could have been a reply to
many things. For example:
“that’s a great step towards your
goal! Engaging with a task
always seems difficult before we
start, but keep on reminding
yourself how good it feels
during an activity and when
something is achieved. We
enjoy things more when we’ve
put personal effort in them.”
By using SMSs for the one participant
and written app-alike prototyped notes
for the other, effects of a conversational
artificial companion could be compared
carried around.
The evaluation was conducted with twobaby boomers, a couple, in their
mid-50s. The participants were close to
retirement (2 years from it), and have
already been thinking about what they
will do after. They said that they had
certain thoughts about it, but there
didn’t seem to have feasible actions to
be done to reach them.
Their reactions were much different
from the young couple. Moreover thereactions between the SMS participant
and the handwriting-notes one were
really different in the artificial presence
effect I observed. Surprisingly,
beginning the experiment was very
difficult for them. They were discussing
for about an hour, during our first
session, what kind of long-term goal
would they chose, since they had
common long-term goals as a couple.
As the experiment evolved theyreported to me that the SMS participant
found it very difficult to put all this
thinking into the goals and the actions.
The other one find it a very easy task,
just to write down goals. The SMS
participant had as a long-term goal “live
healthier, enjoying life more with my
family”, whereas the other one “improve
our social life”. Neither of them carried
the token around.
The representation of Buddy was more minimal for older participants.
99
Validate
FIGURE 75 Evaluation test no.2
Giving Buddies to older participants to
live with them, for one week.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 99/130
Accepting Buddy to the house
Participants
1.
Insights
Overly the insights I observed and
would point out for the young
generation would be:
The insights, as I observed them from
the older participants, were:
The SMS participant worked
more on the assignment, felt
100
Validate
7.2.4FIGURE 76 Buddy results from young participant

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 100/130
3.
2.
4.
3.
2.
1.
4.
They felt a ‘presence’ in the
house, although the prototypewas not interactive, that
influenced them to remember
and think more often about their
goals,
The person that had free time
wanted to carry the token
around, whereas the busy one
found it a hassle. However the
busy one had times that needed
the tokens with him in order to
write down ideas on the spot,
Personalization of the robot and
the tokens seemed to be a part
of the interaction and the
relation build-up. For example,
one robot was returned with
drawn eyebrows to me (see Figure
76).
Both participants said they
would like something like that,
with more functionality (e.g.
reminders).
more supported, although her
personal reflection was that it
was a very difficult, mental, task.
She perceived the SMS
generalized replies to be me
responding to her actions. She
said: “I thought, you were
replying to me, and I found the
lines very wise and true, when
you said how when beginning a
task seems difficult, but then you
enjoy it”.
The tokens were useless in their
case, as there was no means to
do something with them, or
personalize them. It was like the
token was the SMS itself, and
the written prototyped app for
the other participant, instead.
Both expressed that they liked
the idea, and that they would
buy something like that... for
someone else, and not for them,
if they didn’t seem to invade
someone’s life ‘too much’.
Comparing the two couples there could
be some differences:
the older generation was much
more defensive towards use of
technology,
the young generation tended to
give a negative rate on
themselves after a task,
the older generation thought
‘someone else would be a better
fit to accept such a gift, like their
children’. Whereas the young
generation though “this would
be a great gift for our parents’.
and some similarities:
they had subtle, yet existent,
effect from Buddy as a
presence,
they brought the task to their
needs and pace.
Buddy as returned with eyebrows, personalized, after the 1 week of the test
Prototyping for
FaceReader
Usage
101
Validate
7.3.
FIGURE 77 FaceReader prototype-ready
Inception-mode: a person inside a
camera, as seen within an ‘open’ Buddy.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 101/130
Usage
In order to cross-check whether theinsights from the creative workshops
(see chapter 5) were true, that is that
valence only would be relevant to be
used within Buddy for emotion
recognition, a small test was set-up.
The prototype made (see Figure 77) was a
Buddy on the outside that carried a
camera on the inside. The task was to
confront people with a Buddy that
displays abstract thoughts (illustrated
as abstract moving things on the iPad’s
screen). People, while interacting with
Buddy, would be recorded. Later, the
footage would be analyzed using
FaceReader. The results (see Figure 78)
showed that, mostly, the user had
mostly positive emotions. Sometimes
FaceReader was not able to read his
face, and therefore his emotions,
because he turned his head to other
directions. However, in no case, couldwe say that by reading emotions like
‘disgusted’ would be useful for Buddy to
know as it cannot be easily evoked in
such a context. Older participants also
mentioned that, if in any case, had a
negative feeling, they would ‘show it’ in
front of Buddy anyway.
102
Validate
FIGURE 78 FaceReader footage
Footage analyzed by FaceReader as
captured from Buddy’s camera.
VideoTime Emotion
00:00.0 Unknown
00:02.1 Neutral
00:04.2 Happy
00:05.4 Neutral
00:06.5 Unknown
00:20.8 Happy

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 102/130
00:21.9 Unknown
00:24.0 Happy
00:25.9 Unknown
00:32.4 Neutral
00:37.5 Unknown
00:38.6 Neutral
00:43.2 Unknown
00:45.1 Happy
00:45.8 Neutral
00:53.9 Happy
00:54.6 Neutral
00:55.5 Happy
00:56.7 Neutral
00:58.2 Unknown
00:59.8 Neutral
01:01.2 Unknown
01:02.1 Neutral
01:03.3 Unknown
01:20.8 Neutral
01:21.6 Angry
01:25.0 Neutral
01:31.2 Unknown
Analyzing facial expressions duringfeedback session
Participants
Reflect

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 103/130
This final part includes
reflection on many different
levels regarding this project.
Discussion on the methods
and approach used on how to
design robots per sé is the
main one, followed by
recommendations for
alterations of the proposed
framework, concept,
methodology, and personal
reflection on the whole
process.
Reflect
ConsiderationsThe beginning is the end is the beginning
104

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 104/130
Chapter Overview
8.1
Concept, post-evaluation thoughts
8.2
Insights, the future of artificial companions
8.3
On methods and conflicts of fields
8.4 Future recommendations
8.5 Personal reflection
A project is only half complete without a proper reflection on the insightsthat derived from it, considerations for future work or addition/changes to
the proposed design, the followed approach, recommendations towards
the company and last, but not least, personal reflection. This way people
that may be interested in similar kind of studies will not repeat the same
mistakes I did, and will be able to learn from what I learned.
8.
105
107
108
108
106
Concept, post-
evaluation
thoughts Otherwise I will just be too tired from
get along robots, and technology in
general. However the proposed solution
was bared a ‘technological‘ one,
intentionally to overcome such
acceptance issues. Perhaps this is why
people get to be hesitating in the
people interested in a robot that does
only one thing. From the weekly tests, I
cannot assume that this will not happen,
and I would definitely be curious in
having insights from longer tests.
105
Reflect
8.1.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 105/130
Overly I am quite satisfied with theoutcomes of the final user-tests of the
concept. To be honest, I expected much
less acceptance of such a concept,
especially from the older generation.
Although it is a known issue that
participants to such user-tests engage
because they want to help the facilitator
of the test, and they consciously think
they socially interact with the person
behind the wizard-of-oz setup and not
with the artificial being [J31], I reallythink that the somewhat long-term
conduction of the experiment made
them change their minds in the end. It
seemed that what Buddy’s true effect is
that it gently pushes into your
conscious zone thoughts we usually
leave as a big ‘maybe‘ in the back of
our heads. Having a ‘presence’ dealing
with such kind of goals puts you into a
position of just thinking that there
should be some action towards them,
instead of only thinking. It becomes
obvious that just thinking about your
goals is a matter of luck whether it
happens or not. A participant out-loudly
realized that “even my free time has to
be planned in order to be enjoyed.
work and everything else I have to do,
and I will just melt on the couch thewhole afternoon”.
The real challenge of accepting such a
concept though, as a real product,
dwells in the very beginning of getting
introduced to it. At a first glance it
doesn’t seem like a product that people
would buy for themselves, but they did
end up thinking it would be a nice gift
for people they know and have the
comfort of ‘interfering with their lives’with, in a nice way. Somehow the initial
thought is ‘that this product is not for
me, but for someone else I know’. That
is a major consideration for the target
group as well. The irony is that the
young participants found this a great
solution for their parents/older relatives,
and that the older participants found it a
great suggestion for their children/
younger relatives! In my opinion this
reflects back to the findings of theliterature around the emotional isolation
(see chapter 2.2). We are very difficult,
almost in denial, in admitting that we
need external forces of help. Another
thought is that no product fits to
everyone and some people will never
beginning, since the word ‘robot‘ has
very biased associations and why they
change their acceptance stance after
they spend a week with Buddy.
Buddy was a design challenge of how
much can we subtract from the notion of
‘robot‘, keeping only the ‘minimum‘ to
evoke feelings of companionship. In
order for this to happen I found myself
many times iterating only to realize that
I have accidentally added too many
things to the proposed design, and thatI have to go back a step and remove
those again. That happened from the
first step of ideation, till the very end
when I was dealing with the aesthetics
of Buddy. It is a difficult decision
between having an artificial companion
that would be very focused on doing
one thing right, and having a
sustainable interest in interacting with it.
Current artificial companions are the
perfect example of ‘featurefatigue’ [J32], as they do a bit of
everything (supporting skype-alike
communications, agendas, home
assistance, etc) that they end up being
anything but companions. On the other
hand I can see a problem in keeping
After careful testing and consideration I
would envision certain things being part
of Buddy:
Personalization of the device, in
a very low-tech way, like
drawing on it, or changing its
shape by helping it ‘grow’ with
your materialized goals.
Possibility to extend the network
of goals that Buddy supports byrequesting help via other
‘Buddies’. For example if I need
help on my goal of ‘renovating
my house’ I can send an
invitation of ‘painting the house
this weekend’ to my friends.
Adding functionality to the
tokens. Tasks can have
automatic track, given that theybelong to certain categories.
Time, distance, physical effort,
are just example sensors
currently embedded in similar
tracking devices that could be
useful for some tasks.
1.
2.
3.
Insights, the
future of artificial
companions the best artificial companion
It is a category of products that comes
with a highly biased interpretation or its
name. When people hear ‘robot’ they
imagine everything they see in the
movies and directly become defensive.
From the user-tests, while looking for
emotions, then they would just be in
front of Buddy only with a ‘happy’ face.
There is a huge unexplored space of
simpler interactions, one could say that
an artistic boundary has to be crossed,
ff f (
106
Reflect
8.2.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 106/130
The future of artificial companions isunder... construction. All this technology
is so expensive, but the main point is
that it is not relevant to the interactions.
Take AIBO for example, that was ahed
of its time, technologically, when
produced, but very high-end for
consumers to buy it [W13]. In general
demand of robotic companions is
reported to be very low, in home-
contexts. It is a product that has a long
way till it becomes mainstream, andperhaps Buddy, is just a geeky gadget
for now and not a robot, in the public’s
mind.
The notion needs to be redefined
urgently, in a more human-centered
product interaction relation, as
technology promises so bold things
right now, that wipe expectations out
when you finally confront it. For
instance, Pepper (see Figure 79), the
newest home-companion, is extremely
life-alike in its movements and can
understand emotions. People that met
Pepper certainly have an owe as a first
impression to interacting with it, as it is
very well made, and probably one of
advancements so far [W12]. However, on
a subjective level the reviews are ratherdisappointing with big titles like “I met
an emotional robot and felt
nothing” [W12], which says so much
about the relevance technology used
has to the meaningfulness of
interactions with people. When I began
this project I needed a thorough review
of what is out there, and I wouldn’t say I
am convinced that this is the right
direction for companions.
participants I bumped into this issue
countless times, especially in the older
generation. People seemed very
reluctant to host a robot in their houses,
even a prototyped one, if it carried
potentially ‘spying‘ technology. There
were participants that cancelled the test
because of the existence of a camera
that could analyze their facial
expressions into emotions later on.
Even more importantly they confessed
that if Buddy was able to read their
but the effects of the interaction (see
Figure 80) seem to be so much thrillingthat a robot with a screen that can read
your emotions. The only problem is that
this is not what people would actually
call ‘a robot’. My personal, humble
opinion, is that we envision future
robots completely in the wrong way.
Maybe robots are not what we once
thought of, maybe we need a
generation of personalize-it-yourself
automatic products first (see Figure 81).
FIGURE 79 Pepper FIGURE 80 Junior,a lamp that lives when you breath
FIGURE 81 Moti,a robot for autistic children
On methods and
conflict of fields
When starting to read the literature
d HRI d i t th f lion [J34], [J35]. This can barely give
thing to do. However they did carry the
tokens with them when they were invited
to write on them, even if they had
complains that the papers were easy to
get lost inside bags when carried.
At the same time the feedback sought by
screen of the Bid-Buddy, she turned and
asked “is it thinking? Should I wait”?
Which immediately shows that for some
things our mindset is already set by
things we know (in the specific case a
loading computer’s screen), so the
t ti h ld h
107
Reflect
8.3.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 107/130
2.
1.
around HRI, a designer gets the feeling
that it is a field prevailed by scientists,
engineerings and programmers. The
ground is not mature, yet, for a
designer’s approach and this manifest in
the absence of specific methods and
publications that test the relation of
humans to robots under ‘real-life’
circumstances. There are endless
publications of quantitative lab-tests that
do not necessarily lead to hypotheses
that can be used by designers in order
to step from research to designing. Onthe other hand, a designer’s approach
might sound naive, artistic or completely
ungrounded to all of the above people,
as it is highly qualitative approach that
utilizes empathetic hints during the way.
Wherever the common ground is, the
link that is missing is conducting user-
tests that are long enough to indicate
sustainability and relation-changing
issues, in the real final intended
situation. The challenge is to buildrobust enough prototypes to test over a
long period of time, without utilizing
existing robotic platforms that do not fit
in the context. Many hypothesis are
tested in re-programmable NAOs, such
as social intelligence, persuasion and so
consistent results, from an interaction
point of view, as the robot is intended fora different context (of use and
environment), it is giving the wrong
impressions and expectations to the
users and is like forcing the embodiment
of a character into the wrong body.
Developing self-functioning platforms,
just to test interactions and intentions of
users with every little twist of the
concept, is, if not impossible over long
periods of time-test, surely painful and
demanding. Technology, in prototypestages, will probably stop working if you
intent to give it to people without having
access to it and responses might be poor
without the ability to wizard-of-oz-control
the machine. My way out of this situation
was to prototype with leaving technology
out, but keeping the prototype functional
in a way. So the process remains the
same by substituting pieces of
technology with pieces of abstraction. It
is important though that you can do
something with those abstract, replaced
pieces, otherwise people will not use
them. For example, when testing
Buddy’s tokens people didn’t carry them
when they were not invited to write on
them, because it seemed a redundant
At the same time the feedback sought by
participants should be more than
quantitate and more than qualitative too,
researchers should target at getting out
the latent thoughts of participants [B18].
Someone’s ‘structured’ opinion, during
an interview is not truly useful, yet good
to know. However I consider I got the
most out of the insights in two cases:
When I saw people trying to
figure out what is going on with
the prototyped robots,
In relaxed, ‘off-test’, moments
before or after a scheduled
feedback meeting with the
participants.
In the first case, it is disarming how easy
you test what you prototyped wrongly,
what affordances of the object aren’tcommunicated and what the cues reveal
or not. It is just a matter of observation
what people manage to do and what
they automatically think-aloud during that
exploration. For instance, a participant,
while seeing the visualization in the
representation should change.
In the second case all the principles of
generative research are set, without the
exact intention to have such a kind of
session. The participants are sensitized,
because they know the project already,
and if you make them feel comfortable
enough to say anything they thought,
you directly have their latent thoughts.
For example, the most funny comment I
received about a big prototyped-box-
Buddy was before the test started andexactly after a session with smaller box-
Buddies has ended. The participant, the
moment I introduced the Big-Buddy to
him, he cheered “oh my God, Buddy, you
grew up! Is that because I fed you all
these tokens last week?”. Which of
course was a moment somewhere
between making fun and filling the silent
space while I was preparing the test.
However it is not just a coincident to see
participants connecting effort put in aprevious test with changes in the shape
of the prototype. In fact the spontaneity,
besides being amusing, reveals a cause-
and-effect continuum in the interaction
and the relation-building with Buddy,
which just makes sense.
Future
Recommendations
As recommendations towards the
company and the future applications of
products. The power of
h i l i d
Personal
Reflection
Projecting myself in the mind state I had
when I was starting this project is a
robotics. At some points I felt I almost
h d t i t th h l i d t
108
Reflect
8.5.8.4.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 108/130
company and the future applications of
FaceReader into artificial companions,
my explorations showed that there are
a lot of commercially exploited potential
with certain bumps to be overcome in
the way. That would be:
Modifying acceptance rates to
older target groups, designing
their expectations further,
sensitizing them before they
even use the final product. Avoid
calling the final result ‘robot’.
Using the least possible
technology, given that it is
relevant and contributes to the
experience, and not because it is
possible to use it.
General insight recommendations for
continuing research and development
on artificial companions would be:
Keep the physicality of
representation to different parts
of the robot, including the robot
itself. Our mental states react
differently to real objects and
changing, evolving and
personalizing physically a robot
is a very intriguing one to be
investigated more.
Keep it simple and focused.
Products, and robots, are easier
to be accepted and
comprehended when you can
easily describe what they are
made for.
Look for other kinds of contexts
to apply FaceReader within an
artificial companion, starting from
easier, target groups.
Psychological contexts, as the
one explored in this project, can
be very subjective in what fits
and what doesn’t. Contexts with
objectively-analyzable results will
help the company develop the
capacity to apply knowledge
gained to more difficult contexts.
People are not comfortable in the
thought of having robots as
friends, yet. They would easier
accept a robot as an assistant
[C10], [C08].
when I was starting this project is a
complete different picture of what I have
now in mind. I initiated the project
because it was not ‘just another
product’, I thought it could meaningfully
contribute to people’s well-being, and
that I could personally contribute to this
field by researching from a designer’s
perspective of view. I thought that I
would learn how to become a better
designer at sketching, researching,
user-testing, improve my design
thinking skills by analyzing andcombining insights from different fields,
and at whatever an interaction designer
is called to do these days. Reality is that
all of the above are true, I was wrong.
What I really needed in the way was not
to improve my design-skills, but to
improve my soft-skills. Suddenly
everything but designing was relevant.
Micro-management of the project,
organizing workshops or user tests,reaching out to people in order to find
participants, changing roles,
communicating results, getting
everyone on the same page, convincing
people (and sometimes myself as well)
that a design approach has a place in
had to re-invent the wheel, in order to
figure out what’s the next step. When
you open the door to HRI, you literally
open a waterfall of literature directly into
your head. Turning this knowledge to
design steps has be a very challenging
switch to turn. Following the insights
from the user-tests feels very inspiring
but not always aligned to the business
world. Nevertheless I did realize that I
was able to think by prototyping, and
not by sketching, which soon became
part of my iterations. When somethingcouldn’t fit, it was immediately obvious
in the prototype, and I had to go a step
back.
Creating a personal viewpoint and
theory of the future artificial
companions, selecting a specific focus
and target group, in order to create a
product that would add value and be
desirable by people still seems like a
mission that doesn’t feel like conquered,by one designer alone. Don’t get me
wrong, I do believe the project has
valuable insights. But society will need
more than one project to build the right
relationship with artificial companions.
One swallow will not make spring, right?
Append

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 109/130
110Appendix 1
References[J]ournals

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 110/130
[J01] Desmet, P. M. A., & Hekkert, P.
(2009). Special issue editorial: Design &
Emotion. International Journal of
Design, 3(9), 1-6.
[J02] Castellano, G., Leite, I., Pereira,
A., Martinho, C., Paiva, A., & McOwan,
P. W. (2010). Affect recognition for
interactive companions: challenges and
design in real world scenarios. Journal
on Multimodal User Interfaces, 3(1-2),
89-98.
[J03] Langner, O., Dotsch, R., Bijlstra,
G., Wigboldus, D. H. J., Hawk, S. T., &
van Knippenberg, A. (2010).
Presentation and validation
of the Radboud Faces Database.
Cognition and Emotion, 24(8),
1377-1388.
[J04] Guo, G., Guo, R., & Li, X. (2013).
Facial expression recognition influenced
by human aging. IEEE transactions on
affective computing, 4(3), 291-298.
[J05] Ekman, P. and Friesen, W. (1982).
Felt, false, and miserable smiles.
Journal of Nonverbal Behavior, 6(4),
238-252.
[J06] Williams, P., & Aaker, J. L. (2002).
Can mixed emotions peacefully
coexist?. Journal of Consumer
Research, 28(4), 636-649.
[J07] Martınez-Miranda, J., & Aldea, A.
(2005). Emotions in human and artificial
intelligence. Computers in Human
Behavior, 21(2), 323-341.
[J08] Broadbent, E., Stafford, R., &
MacDonald, B. (2009). Acceptance of
healthcare robots for the older
population: Review and future
directions. International Journal of
Social Robotics, 1, 319-330.
[J15] Hekkert, P. (2006). Design
aesthetics: Principles of pleasure in
product design. Psychology Science,
48(2), 157-172.
[J16] Yanco, H. A., & Drury, J. L. (2004).
Classifying human-robot interaction: an
Transactions on
Systems, Man, and Cybernetics, 21(3),
473–509.
[J22] Nickles, M., Rovatsos, M., &
Weiss, G. (2004). Agents and
computational autonomy: potential,
for a robot companion. Autonomous
Robots, 24(2), 159-178.
[J28] Mori, M. (1970). Bukimi no tani
[The uncanny valley]. Energy, 7(4), 33–
35.
111Appendix 1: References | Journals

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 111/130
[J09] Baumeister, R. F., Bratslavsky, E.,
Finkenauer, C., & Vohs, K. D. (2001).
Bad is stronger than good. Review of
general psychology, 5(4), 323.
[J10] Stappers, P. J. (2007). Doing
design as a part of doing research.
Design research now, 81-91.
[J11] Goodrich, M. & Schultz, A. (2007):
Human-Robot Interaction: A Survey. In
Foundations and Trends in Human-
Computer Interaction, 1(3), 203-275
[J12] Turing, Alan (1950), "Computing
Machinery and Intelligence", Mind LIX
(236), 433–460.
[J13] Webster, J., Trevino, L. K., &
Ryan, L. (1994). The dimensionality
and correlates of flow in human-
computer interactions. Computers in
human behavior, 9(4), 411-426.
[J14] Desmet, P. M., & Hekkert, P.
(2007). Framework of product
experience. International Journal of
Design, 1(1), 57-66.
y g
updated taxonomy. In SMC (3) (pp.
2841-2846).
[J17] Fong, T., Nourbakhsh, I., &
Dautenhahn, K. (2003). A survey of
socially interactive robots. Robotics and
autonomous systems, 42(3), 143-166.
[J18] Young, J. E., Sung, J., Voida, A.,
Sharlin, E., Igarashi, T., Christensen, H.
I., & Grinter, R. E. (2011). Evaluating
human-robot interaction. International
Journal of Social Robotics, 3(1), 53-67.
[J19] Dautenhahn, K. (2007). Socially
intelligent robots: dimensions of
human–robot interaction. Philosophical
Transactions of the Royal Society B:
Biological Sciences, 362(1480),
679-704.
[J20] Rose, R., Scheutz, M., &
Schermerhorn, P. (2010). Towards a
conceptual and methodological
framework for determining robot
believability. Interaction Studies, 11(2),
314-335.
[J21] Albus, J. S. (1991). Outline for a
theory of intelligence, IEEE
p y p
risks, and solutions, 2969(1)
[J23] Brooks, R. A. (1991). Intelligence
without representation. Artificial
Intelligence, 47 (1–3), 139–59
[J24] Bonnasso, R. P., Firby, R. J., Gat,
E., Kortencamp, D., Miller, D. P. and
Slack, M. G. (1997). Experiences with
an architecture for intelligent, reactive
agents, Journal of Experimental and
Theoretical Artificial Intelligence, 9(2-3),
237–256
[J25] Goldman, A. (2001). The
aesthetic.
[J26] Kerepesi, A., Kubinyi, E., Jonsson,
G. K., Magnusson, M. S., & Miklósi, A.
(2006). Behavioural comparison of
human–animal (dog) and human–robot
(AIBO) interactions. Behavioural
Processes, 73(1), 92-99.
[J27] Walters, M. L., Syrdal, D. S.,
Dautenhahn, K., Te Boekhorst, R., &
Koay, K. L. (2008). Avoiding the
uncanny valley: robot appearance,
personality and consistency of behavior
in an attention-seeking home scenario
[J29] Dautenhahn, Kerstin (2003):
Roles and functions of robots in humansociety: implications from research in
autism therapy. In Robotica, 21 (4) pp.
443-452
[J30] Rutledge, R., Skandali, N., Dayan,
P., and Dolan, R. (2014). A
computational and neural model of
momentary subjective well-being.
PNAS, published ahead of print August
4, 2014, doi:10.1073/pnas.1407535111.
[J31] Nass, C., and Moon, Y. (2000)
Machines and mindlessness: Social
responses to computers. Journal of
social issues 56.1 : 81-103.
[J32] Thompson, D., Hamilton, R., and
Rust, R.. (2005). Feature fatigue: When
product capabilities become too much
of a good thing. Journal of marketing
research 42.4: 431-442.
[J33] Eysenck HJ (1991) Dimensions of
personality: 16, 5 or 3? criteria for a
taxonomic paradigm. Personality and
individual differences 12:773–790
[J34] Torta, E., Oberzaucher, J.,
Werner, F., Cuijpers, R. H., & Juola, J.
F. (2012). Attitudes towards socially
assistive robots in intelligent homes:
results from laboratory studies and field
trials. Journal of Human-Robot
Interaction, 1(2), 76-99.
[J39] Lombard, M., Reich, R. D., Grabe,
M. E., Bracken, C. C., & Ditton, T. B.
(2000). Presence and television.
Human Communication Research,
26(1), 75-98.
[J40] Lee, K. M. (2004). Presence,
[J46] Victor, C., Scambler, S., Bond, J.,
& Bowling, A. (2000). Being alone in
later life: loneliness, social isolation and
living alone. Reviews in Clinical
Gerontology, 10(04), 407-417.
[J47] Hartman-Stein, P. E., &
Sciences and Social Sciences, 57(1),
S33-S42.
[J52] Turkle, S. (2006, July). A nascent
robotics culture: New complicities for
companionship. In American
Association for Artificial Intelligence
112Append

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 112/130
, ( ),
[J35] Ham, J., Bokhorst, R., Cuijpers,
R., van der Pol, D., & Cabibihan, J. J.
(2011). Making robots persuasive: the
influence of combining persuasive
strategies (gazing and gestures) by a
storytelling robot on its persuasive
power. In Social Robotics (pp. 71-83).
Springer Berlin Heidelberg.
[J36] Stronks, B., Nijholt, A., van der
Vet, P. E., & Heylen, D. K. J. (2002).
Designing for friendship: Becoming
friends with your ECA.
[J37] Breazeal, C., Takanishi, A., &
Kobayashi, T. (2008). Social robots that
interact with people. Springer
Handbook of Robotics, 1349-1369.
[J38] Lee, K. M., Peng, W., Jin, S. A., &
Yan, C. (2006). Can robots manifest
personality?: An empirical test of
personality recognition, social
responses, and social presence in
human–robot interaction. Journal of
communication, 56(4), 754-772.
explicated. Communication theory,
14(1), 27-50.
[J41] Breazeal, C. (2003). Toward
sociable robots. Robotics and
Autonomous Systems, 42, 167–175.
[J42] Sarvimäki, A., & Stenbock%Hult, B.
(2000). Quality of life in old age
described as a sense of well%being,
meaning and value. Journal of
advanced nursing, 32(4), 1025-1033.
[J43] Reker, G. T., Peacock, E. J., &
Wong, P. T. (1987). Meaning and
purpose in life and well-being: A life-
span perspective. Journal of
Gerontology, 42(1), 44-49.
[J44] Luo, Y., Hawkley, L. C., Waite, L.
J., & Cacioppo, J. T. (2012). Loneliness,
health, and mortality in old age: A
national longitudinal study. Social
science & medicine, 74(6), 907-914.
[J45] Singh, A., & Misra, N. (2009).
Loneliness, depression and sociability
in old age. Industrial psychiatry journal,
18(1), 51.
Potkanowicz, E. S. (2003). Behavioral
determinants of healthy aging: Good
news for the baby boomer generation.
Online Journal of Issues in Nursing,
8(2), 127-146.
[J48] Gfroerer, J., Penne, M.,
Pemberton, M., & Folsom, R. (2003).
Substance abuse treatment need
among older adults in 2020: the impact
of the aging baby-boom cohort. Drug
and alcohol dependence, 69(2),
127-135.
[J49] Yang, K., & Victor, C. (2011). Age
and Loneliness in 25 European Nations.
Ageing and Society 31(8): 1368-1388.
[J50] Forbes, A. (1996). Caring for older
people. Loneliness. BMJ: British
Medical Journal, 313(7053), 352.
[J51] Van Baarsen, B. (2002). Theories
on Coping With Loss The Impact of
Social Support and Self-Esteem on
Adjustment to Emotional and Social
Loneliness Following a Partner's Death
in Later Life. The Journals of
Gerontology Series B: Psychological
AAAI.
[J53] Tao, Y., Wang, T., Wei, H., & Yuan,
P. (2010). A Behavior Adaptation
Method for an Elderly Companion
Robot-—Rui. In Social Robotics (pp.
141-150). Springer Berlin Heidelberg.
[J54] Wada, K., & Shibata, T. (2007).
Living with seal robots—its
sociopsychological and physiological
influences on the elderly at a care
house. Robotics, IEEE Transactions on,
23(5), 972-980.
113Appendix 1
References[C]onference Proceedings & Workshop Proceedings

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 113/130
[C01] Desmet, P. M. A. (2011, October).
Design for happiness: Four ingredients
for designing meaningful activities. In
Proceedings of the IASDR2011, the
fourth world conference on design
research (Vol. 31).
[C02] Michalowski, M. P., Sabanovic, S.,
& Simmons, R. (2006). A spatial model
of engagement for a social robot. In
Advanced Motion Control, 2006. 9th
IEEE International Workshop on (pp.
762-767).
[C03] Scholtz, J. (2002). “Human-robot
interactions: creating synergistic cyber
forces.” In Multi-Robot Systems: From
Swarms to Intelligent Automata
(Proceedings from the
2002 NRL Workshop on Multi-Robot
Systems) , A. C. Schultz and L. E.
Parker, eds. Kluwer Academic
Publishers. pp. 177 – 184.
[C04] Bartneck, C., & Forlizzi, J. (2004,
September). A design-centred
framework for social human-robot
interaction. In Proceedings of the 13th
IEEE International Workshop on Robot
and Human Interactive Communication
(pp. 591-594).
[C05] Goodrich, M. A., Crandall, J. W.,
and Stimpson, J. L.. (2003). “Neglect
tolerant teaming: issues and dilemmas.”
In Proceedings of the 2003 AAAI Spring
Symposium on Human Interaction with
Autonomous Systems in Complex
Environments.
[C06] Meystel, A. M. (1996,
September). Intelligent systems: A
semiotic perspective. In Intelligent
Control, 1996., Proceedings of the
1996 IEEE International Symposium on
(pp. 61-67). IEEE.
C C S
[C11] Huttenrauch, H. and Eklundh, K.
S. (2004). Investigating socially
interactive robots that give the right
cues and make their presence felt.
Proceedings of the CHI 2004 Workshop
on Shaping Human-Robot Interaction,
pp. 17 – 20.
The First IEEE/RAS-EMBS International
Conference on (pp. 483-488). IEEE.
114Appendix 1: Conference Proceedings

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 114/130
[C07] Ray, C., Mondada, F., & Siegwart,
R. (2008, September). What do people
expect from robots?. In Intelligent
Robots and Systems, 2008. IROS
2008. IEEE/RSJ International
Conference on (pp. 3816-3821). IEEE.
[C08] Roy, N., Baltus, G., Fox, D.,
Gemperle, F., Goetz, J., Hirsch, T., &
Thrun, S. (2000, July). Towards
personal service robots for the elderly.
In Workshop on Interactive Robots and
Entertainment (WIRE 2000) (Vol. 25, p.
184).
[C09] Chatley, A. R., Dautenhahn, K.,
Walters, M. L., Syrdal, D. S., &
Christianson, B. (2010). Theatre as a
discussion tool in human-robot
interaction experiments-a pilot study. In
Advances in Computer-Human
Interactions, 2010. ACHI'10. Third
International Conference on (pp.
73-78). IEEE.
[C10] Dautenhahn, K., et al., (2005).
What is a Robot Companion – Friend,
Assistant or Butler?, in Proccedings of
the International Conference on
Intelligent Systems and Robots.
[C12] Kaplan, F. (2000). Free creatures:
The role of uselessness in the design of
artificial pets. In Proceedings of the 1st
edutainment robotics workshop (pp.
45-47).
[C13] Stiehl, W. D., Breazeal, C., Han,
K. H., Lieberman, J., Lalla, L., Maymin,
A., & Gray, J. (2006). The huggable: a
therapeutic robotic companion for
relational, affective touch. In ACM
SIGGRAPH 2006 emerging
technologies (p. 15). ACM.
[C14] Kidd, C. D., Taggart, W., & Turkle,
S. (2006, May). A sociable robot to
encourage social interaction among the
elderly. In Robotics and Automation,
2006. ICRA 2006. Proceedings 2006
IEEE International Conference on (pp.
3972-3976). IEEE.
[C15] Marti, P., Bacigalupo, M., Giusti,
L., Mennecozzi, C., & Shibata, T. (2006,
February). Socially assistive robotics in
the treatment of behavioural and
psychological symptoms of dementia. In
Biomedical Robotics and
Biomechatronics, 2006. BioRob 2006.
115Appendix 1
References[B]ooks

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 115/130
[B01] Breazeal, C. L. (2004). Designing
sociable robots. MIT press.
[B02] Lewin, K. (1935). A dynamic
theory of personality.
[B03] Turkle, S. (2007). Evocative
objects: Things we think with. MIT
press. 1st edition.
[B04] Stein, L. (1927). The ABC of
Aesthetics.
[B05] Turkle, S. (2005). The second
self: computers and the human spirit.MIT press. 2nd edition.
[B06] Turkle, S. (2012). Alone together:
Why we expect more from technology
and less from each other. Basic books.
[B07] Nelson, T. D. (2002). Ageism:
Stereotyping and prejudice against
older persons. MIT press.
[B08] Rubin, J. (1984) Handbook of
Usability Testing: How to Plan, Design,
and Conduct Effective Tests. John Wiley
and Sons, Inc.
[B09] Hekkert, P., & van Dijk, M. (2011).
ViP-Vision in Design: A Guidebook for
Innovators. BIS Publishers.
[B10] Tassoul, M. (2009). Creative
facilitation. VSSD.
[B11] Homer (circa 800 BC). The Iliad
[B12] Needham, Joseph (1991).
Science and Civilisation in China:
Volume 2, History of Scientific Thought.
Cambridge University Press.
[B13] Wiener, N. (1966). God and
Golem Inc.: A Comment on Certain
Points where Cybernetics Impinges on
Religion. Cambridge, MA, USA: MIT
Press
B[20] DelCampo, D. S. (2006). Aging:
What to Expect and how to Cope. New
Mexico State University, Cooperative
Extension Service.
B[21] Stickdorn, M., & Schneider, J.
(2011). This is service design thinking:
Basics tools cases Wiley
116Appendix 1: Books

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 116/130
Press.
[B14] Schifferstein, H. N., & Hekkert, P.
(Eds.). (2011). Product experience.
Elsevier.
[B15] Gardner, H. (1985). Frames of
mind: The theory of multiple
intelligences. Basic books.
[B16] Murphy, R. R., (2000) Introduction
to AI Robotics. Cambridge, MA, USA:
The MIT Press.
[B17] Turkle, S. (2010). In good
company? On the threshold of robotic
companions. Close Engagements with
Artificial Companions: Key Social,
Psychological, Ethical and Design
Issues. Amsterdam, The Netherlands:
John Benjamins Publishing Company,
3-10.
[B18] Sanders, E. B., & Stappers, P. J.(2012). Convivial toolbox. Generative
Research for the Front End of Design.
B[19] Blomkvist, J. (2010).
Conceptualising Prototypes in Service
Design.
Basics, tools, cases. Wiley.
117 Appendix 1
References[R]eports

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 117/130
[R01] P. P.M. Hekkert, J.S.M. Vergeest,
S. Jin (2009), Toward Sustainable Well-
being, Research Portfolio IDE/TUD
2008-2012, Delft University of
Technology, Delft
[R02] McKinsey Global Institute (2013).
Disruptive technologies: Advances that
will transform life, business, and the
global economy (Vol. 180). San
Francisco.
[R03] Noldus (2014). FaceReader
Methodology. The Netherlands.
[R04] Gunderson, J. P., & Gunderson,
L. F. (2004). Intelligence= autonomy=
capability. Performance Metrics for
Intelligent Systems, PERMIS.
[R05] Waag Society (2012), Real-life
care stories
[R06] Hamilton, M., & Hamilton, C.(2006). Baby Boomers and Retirement.
Dreams, fears, and anxieties. Sydney:
The Australian Institute.
[R07] Anderson, D., & Kennedy, L.
(2006). Baby boomer segmentation:
eight is enough. AC Neilsen Consumer
Insight Magazine, Fall/Winter.
118Appendix 1
References[W]eb Pages

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 118/130
[W01] Delft IDE’s research
competencies. Retrieved 20.6.2014
from http://www.io.tudelft.nl/en/
research/
[W02] Dautenhahn, K. (2013): Human-
Robot Interaction. In: Soegaard, Mads
and Dam, Rikke Friis (eds.). "The
Encyclopedia of Human-Computer
Interaction, 2nd Ed.". Aarhus, Denmark:
The Interaction Design Foundation.
Retrieved 20.6.2014 from http://
www.interaction-design.org/
encyclopedia/human-
robot_interaction.html
[W03] Gates, B. (2014). A robot in every
home. Retrieved 20.6.2014 from http://
www.scientificamerican.com/article/a-
robot-in-every-home/
[W04] Facial Action Coding System.
Wikipedia, The Free Encyclopedia.
Wikimedia Foundation. Retrieved
20.6.2014 from http://en.wikipedia.org/
wiki/Facial_Action_Coding_System
[W05] Unimate. Robot hall of fame.
Retrieved 20.6.2014 from http://
www.robothalloffame.org/inductees/
03inductees/unimate.html
[W06] Zunt, D. "Who did actually invent
the word "robot" and what does it
mean?". The Karel #apek website.
Retrieved 20.6.2014 from http://
capek.misto.cz/english/robot.html
[W07] Online Etymology Dictionary.
Retrieved 20.6.2014 from http://
www.etymonline.com/index.php?
allowed_in_frame=0&search=robot&se
archmode=or
[W08] Leonardo3.net. Leonardo da
Vinci's Robots. Retrieved 20.6.2014
from http://www.leonardo3.net/
leonardo/press/pdf/L3%20-
%20libro robot-hi.pdf
[W14] Quora, What does it feel like to
be old? Retrieved 30.05.2014 from
http://www.quora.com/Aging/What-
does-it-feel-like-to-be-old
[W15] Britannica, Robot definition.
Retrieved 20.6.2014 from http://
www.britannica.com/EBchecked/topic/
119Appendix 1: Web Pages

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 119/130
_ p
[W09] Robotics Research Group.
Robotics History Timeline. Retrieved
20.6.2014 from http://
robotics.ece.auckland.ac.nz/index.php?
option=com_content&task=view&id=31
[W10] The guardian. Eugene passed
Turing test (2014). Retrieved 20.6.2014
from http://www.theguardian.com/
technology/2014/jun/09/scientists-
disagree-over-whether-turing-test-has-been-passed
[W11] Online Etymology Dictionary.
Retrieved 20.6.2014 from http://
www.etymonline.com/index.php?
term=aesthetic
[W12] Byford, S. I met an emotional
robot and felt nothing. Retrieved
20.7.2014 from http://
www.theverge.com/2014/6/19/5820080/ meeting-softbank-pepper-robot
[W13] Borland, J. Sony puts AIBO to
sleep. Retrieved 20.7.2014 from http://
news.cnet.com/Sony-puts-Aibo-to-
sleep/2100-1041_3-6031649.html
p
505818/robot
120Appendix 1
References[T]hesis and dissertations

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 120/130
[T01] Breazeal, C. L. (2000). Sociable
machines: Expressive social exchange
between humans and robots (Doctoral
dissertation, Massachusetts Institute of
Technology).
[T02] Schoenmakers, E. C., van Tilburg,
T., & Fokkema, T. (2013). Coping with
loneliness. Vrije Universiteit.
Appendix 2
QuestionnaireQuestions and answers
121

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 121/130
122
Age of
retirement
What was
their
profession?
Where do
they come
from?
Other Describe the whole story
65 Fisherman Greek Sleeper He planned to enjoy his life by relaxing, spending some time with good friends and family and take care of himself.
55
Baker,
Shopkeeper,
Entrepreneur
Dutch
Having ideas, doing
those, not all
planned
Retirement happened suddenly (could sell the shop), no fixed plans, do a lot of nice stuff like traveling, and some volunteer work together with
partner.
Appendix 2: Questionnaire | The answers

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 122/130
62
Social
Worker/
Handyman
Dutch Daydreamer The retirement was caused by a burnout , so not planned. Don't think there were any plans for after retirement.
55Mechanical
EngineerIran Planner
I don't know what he planned in the beginning. He didn't share, but as I understood him, he started reading as much as possible (he already read
before retiring but he added more time). He continued with working. he always said "I am getting bored with sitting in the house" . In general he
enjoys working and be updated, so he is trying to not be retired mentally or even physically, since he goes also to gym (not really a gym, but like
working out hours with other retired people)three days per week and I know he enjoys it.
55Manager in a
chemical plantDutch Planner
"My father is/was mainly occupied with taking care of the needs of other, he has a big social network around him(family and frames). My mother got
ill and he supported her, so that she could stay living at home. So, he is mainly busy with taking care of others. He is know 83 so it is difficult to
remember the first years of his retirement.
56Electrical
Engineer Greek PlannerThey planned to open a little store selling goods that are of personal interest to them. A few years before. They have saved up enough to do
whatever they wished and travel at least twice a year.
65 Engineer Turkey
Creates daily
routines and seems
to enjoy
I don't think they planned much, just find small stuff to engage and it seems to work, not much trouble yet. Just not big plans..
65 Teacher Dutch PlannerIn the years before the retirement they started to work less. Their plan was to go traveling, so they bought a camper. Right now they are spending a
few months a year traveling trough Europe.
65 Teacher Dutch Planner"Started painting and doing sculptures in wood and stone. Currently planning to cycle to spain in summer and training to do so. Busy with
grandchildren, etc."
64Magazine
editorDutch
Happy to retire,
worked long
enough
Was happy to retire, worked since 15 years old. Took on a lot of hobby's, mainly in the field of craftmanship.
55Mechanic /
FitterDutch Sheep
This is hard to say, because this person is grandfather, and I don't know what he was planning to do. As far as I know he did what my grandmother
wanted to do, and he liked doing that (so he was a follower). However, when his wife died, he didn't really have much motivation to do things (of
course, this is normal after a beloved person dies), but he still participates in everything.
65
Worked at a
cargo service
company /
airport
Dutch Planner The plan was to spend more time with family and friends and to play more sports. It has worked out good so far, also with support of his wife.
Appendix 3
Ideation, rejectedon failed attempts to create ‘three concepts’
123

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 123/130
Miss-matched concept no.1:
a robot that visits your family instead of
you and brings news back to you in the
format of captured video of your family
talking to you.
124Appendix 3: Ideation | Rejected

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 124/130
Miss-matched concept no.2:
a robot that takes you to place that you
have vivid memories or, in order to
capture the storytelling of them for your
future relatives.
125Appendix 3: Ideation | Rejected

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 125/130
Morbi tincidunt odio sit amet dolor pharetra dignissim. Nullam volutpat, ante a frin
gilla imp erdiet, ipsum lorem set dui neque.
Miss-matched concept no.3:
a robot that travels instead of you into
places that you would like to go but you
can’t. While on the go you can
communicate with people the robot
sees.
Appendix 4
Aging storieshow does it feel to be old?
126
For developing empathy, because I am not that old, I searched
for some stories from people that are old online. When I started
this research I realized I don’t have access to old people. I was
surprised to find out how rich insights internet searches can give
you instead.

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 126/130
Ton is usually in his room watching
television. He takes no initiative to get
something started; if the care staff didn’t
get him out of bed in the mornings, he’dbe there all day. He is not curious at all
about technology; the care staff turns on
his television. He has no contact with
his fellow residents and no interest in
doing anything with them. Sometimes
the staff move him to the corridor so
that he can join their care meeting. He
likes that well enough, but quickly bores
of it and wants to go back to his own
room. Once a week his son, his only
visitor, drops in for a chat. He does not
go anywhere himself.
He has no sense of the day progressing
and does not know when he ought to be
doing something, or what. The care staff
try to structure his day somewhatthrough routine daily activities like
eating and washing, but if you ask him
what he does he says: “I do nothing all
day.”
His only activity is occupational therapy,
which he enjoys. Ton doesn’t care for
games, but does enjoy watching films
on TV. He likes the old comedy TV
series Toen Was Geluk Heel Gewoon.
Others do his shopping for him, but hetakes almost no notice. His carer
explains that they go through the
shopping list once a week.
Ton
“I do nothing all day”
[R05]
127 Appendix 4: Aging Stories

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 127/130
Liesbeth is not one to give up. She is
determined to live independently as
long as possible. She often goes out for
a stroll, using her walking frame to holdthe bottle that supplies fresh oxygen,
via a slender tube, to her nose. When
she gets home she plugs the tube into a
special apparatus that allows her to
walk around the house freely. The tube
can easily get tangled up with furniture,
however, so she has chairs but no sofa,
leaving more room to maneuver. She
lives in a care location in the centre of a
large city. This was a conscious choice;
in a city there’s always something goingon, something to see. She loves being
able to look out of her window and see
the activity. The curtains are sometimes
drawn shut, however. She attaches
great importance to privacy and rest.
She thinks it important to keep up with
the times. She knows exactly what she
wants and is not afraid to give her
opinion. She leads an active social life,but takes part only in those activities that
she finds really interesting. Liesbeth can
still do everything she wants, and never
needs to be pushed into action. She
would, however, like to have a clearer
idea of what is being organized around
her. She always wants to know what’s
going on, so that she can get involved
with the activities she finds most
interesting. But she does not want to use
a computer for this purpose. She’sreluctant to begin, for fear of discovering
what she is no longer able to do. If a
technology could help her to be more
independent, however, she would
definitely embrace it.
Liesbeth
“I want to stay a part of the world”
[R05]
128Appendix 4: Aging Stories

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 128/130
Morbi tincidunt odio sit amet dolor pharetra dignissim. Nullam volutpat, ante a frin
gilla imp erdiet, ipsum lorem set dui neque.
I am the same age as Sean Connery
and Clint Eastwood. In Dog-years that
is really really ancient. I am shorter than
either, but heavier than both. I am notsure if that makes up for it. I was once
the captain of the school basket ball
team. But it was in the UK and we didn't
have pom-pom girls. Here I am on the
diving boat in Italy. The man with the
beard was Reg Vallintine: once the
British Spearfishing champion; he could
swim down over 30m on one breath. I
could only do 20m. I once wanted to be
a painter. I liked Op-Art, but everyone
was doing it in the 1960's. Here aresome of my paintings. I taught Special
Needs children how to draw pictures
using letters of the alphabet. Each one
had to make a picture with their own
name...
So, what does it feel like to be old?
It's a bit& like this, with a cat that has
luminous eyes and sleeps on its back.From time to time something reminds
you of the past. You remember things.
Mostly nice things. There is a tendency
to reminisce, meander, and ramble when
talking and writing about the past, and I
wonder if anyone is listening, reading, or
caring much. But that is not feeling old,
it's more like wondering if there isn't
something better I could be doing. There
is of course, but I can't be bothered.
That's it. When you get old you feel youcan't be bothered because most things
don't matter that much. Or not as much
as they used to. Or not as much as they
ever should have done. I just wish I had
known that then when I was younger.
Stan
“When you get old you feel you can't be bothered because most
things don't matter that much”
[W14]
129Appendix 4: Aging Stories
1. "Old" is not a number. "Old" is a
state of mind

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 129/130
state of mind.
2. With aging comes some
deterioration of body parts. My hearing
problem has gotten worse. Fortunately
hearing aids have gotten better. I wear
glasses all the time. I have arthritis,
which is sometimes painful. I was
diagnosed as "pre-diabetic" five years
ago, lost some weight, and have
controlled it with diet. A lot of my hair is
gone, and what's left is white.
3. In my head, I seem to be pretty
much the same as I was at the age of
four, except I know a bunch more stuff.
4. There are very few new problems.
This is the value older people have to
offer the young. We've experienced a lot
of stuff. It is also the Achilles heel of the
aging. When an actual new problem
appears, we may not recognize it.
5. I prefer the music of my youth. I play
classical music stations to avoid
whatever is current pop. I like country
music and female country music
singers.
6. Dislike almost all Hollywood movies
with a budget larger than the amount
someone could conceivably spend for a
house. They just use the extra money to
blow up things and wreck cars. Preferindependent and foreign films. Never go
to theaters.
7. Dislike most network TV other than
sports. Prefer a few cable shows on USA
and TNT. Guilty pleasure: DWTS.
8. Still working as a freelance writer. Still
making a few bucks.
9. Still in love with and living with the
woman I married in 1958.
10. When my father-in-law hit 90, he
said, "I'm getting old." That works for me.
I'll let you know when I feel like I'm
getting old.
Barry
“Old is not a number, is a state of mind”
[W14]
130Appendix 4: Aging Stories
When my mother was this age I thought
she was ancient. But at about that age
she once told me that she still felt 16
inside and now I know what she meant
• The pluses: I've been through a lot, and
I know a lot. I've had a huge amount of
experience in navigating business and
personal issues. Thanks to all those
years of experience I've got some
perspective that a younger person just
can't have. I have witnessed with my
own eyes a period of astonishing change
in human history politics business and

8/21/2019 Designing artificial companionship through explorative research in order to prevent loneliness in the future elderly of the baby boom generation
http://slidepdf.com/reader/full/designing-artificial-companionship-through-explorative-research-in-order-to 130/130
inside, and now I know what she meant.She's 82 now. My dad will be 90 in a
few months. That's old. I'm not really
old.
Being a young person is like being a
stem cell. You might go anywhere,
become anything. You are all about
potential. When you get to be my age
you are considered to be fully formed as
a human being, the sum of your past
experience.
I am afraid that someday I'll be unable
to learn to use new technologies (I got
my parents a Kindle Fire for Christmas
and sat with them to show them how to
use it and they are both entirely
flummoxed by it, will probably never use
it unless I am sitting there coaching
them), and I would hate that, because
every new thing I've ever learned how
to do has been such an improvement inmy life to date.
When I was young I used to say that I
couldn't wait to be 35, because I figured
I'd have all my shit together by the time
I was 35. FAIL
in human history, politics, business, andtechnology. That, too, gives me some
perspective.
• The minuses: my metabolism has
slowed down a lot. I'm less flexible than I
used to be. My stamina for walking is still
very good, but since breaking an ankle a
few years ago I have a touch of arthritis
in that ankle (as the orthopedist warned
me I would) and it bothers me in cold
weather (and sometimes in warmweather too). I have less energy than I
did 20 years ago.
• The neutrals: I'm both more and less
patient than I used to be. I have a lot less
tolerance for bullshit than I used to, but a
lot more tolerance for the foibles of
human nature. I'm much more conscious
of mortality in general (my own and that
of others), and quicker to speak the
words "I love you" to my family and
closest friends. I used to be more
trusting, more inclined to take people at
face value. Having been betrayed a few
times, I am now more discriminating in
deciding whom to trust.
Stephanie
“I’ll be 56 in a few months. I'm not really old. I'm middle-aged. ”
[W14]