detection of soil-structure-interaction effect by system identification€¦ · ·...
TRANSCRIPT

Detection of Soil-Structure-Interaction Effect by System Identification
○Hajime OkanoKobori Research Complex Inc. Tokyo, Japan
Tatsuya AzuhataNILIM, Tsukuba, Ibaraki, Japan

Seismic Network for Building and Ground
Seismic Networks for Ground K-NET,KiK-net
Facilitated by NIED after 1996 1000Site,20km average distance
Seismic Network for Building Has not facilitated yet, and its construction has been
desired. Because, there is the mismatch between the observed ground
motion and the damage of structure.
NILIM* has started to construct the seismic network for building and surrounding ground in 2010
1
* National Institute of Land and Infrastructure Management

Mismatch between Ground Motion and Damage
Large ground motion versus smaller structure damage than expected
2
1995 Kobe Earthquake(Suzuki, Okano et. al 2007)
0 20 40 60 80 1000.0
0.5
1.0C
(1) (Bf.1971) (Af.1972年以降) :Observed :Simulation
c=1.0
DDamage
Str
engt
h
Possible Factors Designed strength and real strength Evaluation of damage from response Soil Structure Interaction (SSI)

How to know SSI-effect from Seismograph ?
SSI effect is included in the seismograph, and it is difficult to disaggregate SSI effect by simple
manipulation of seismograph.
3
System Identification

System Identification for SSI
4
Soil Structure InteractionInertial Interaction (II) Kinematic Interaction (KI)
yFIM yI
z0
yFIM θFIMH1 θIH1 x1
z1
yI
H
kHH,cHH
kRR,cRR
k1,c1
m1
m0 I0
θ0=θFIM+θI
0 1 2 3 4 50.0
0.5
1.0
1.5
Founda
tion Input
Mtion/Fre
e F
ield
YFIM/Y
FF
Frequency(Hz)
η=0.05
Sway-Rocking Model
sin
FF
FIMFIM Y
Y
Diffraction Function
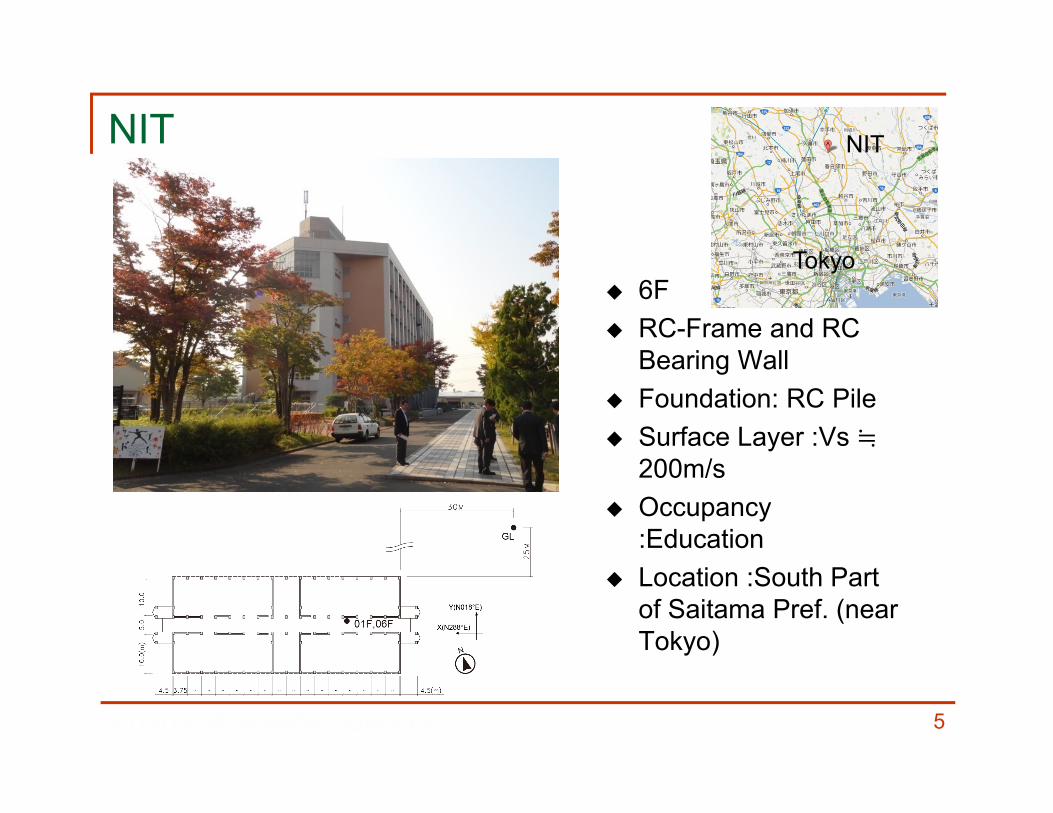
NIT
6F RC-Frame and RC
Bearing Wall Foundation: RC Pile Surface Layer :Vs ≒
200m/s Occupancy
:Education Location :South Part
of Saitama Pref. (near Tokyo)
5
Tokyo
NIT

3/09/2014 Fore-Shock (NIT, Ridge-dir.)
6
6F/1F
6F/Ground
1F/Ground
Foundation Input
Motion/Ground
0 1 2 3 4 5
100
101
Frequency(Hz)
Am
plitud
e R
atio
k1=3.49e+06(kN/m)
h1=0.049
観測:bw=0.20Hz同定対象観測値同定モデル
0 1 2 3 4 510
-1
100
Frequency(Hz)
Am
plitud
e R
atio
観測:bw=0.20Hz同定対象観測値同定モデル入力損失(dif型)
0 1 2 3 4 5
10-1
100
Frequency(Hz)
Am
plitud
e R
atio
kH=6.71e+06(kN/m)
cH=3.97e+05(kN*s/m)
=0.071
観測:bw=0.20Hz同定対象観測値同定モデル入力損失(dif型)
0 1 2 3 4 5
10-1
100
Frequency(Hz)
Am
plitud
e R
atio
YFR
-YI:bw=0.20(Hz)
dif型(同定適合値)
Foundation Response- Inertial Response
Diff. Func.
Observed
Idetified
Observed
Idetified
Observed
Idetified
Diff. Func.
0 1 2 3 4 5
100
101
Frequency(Hz)
Am
plitud
e R
atio
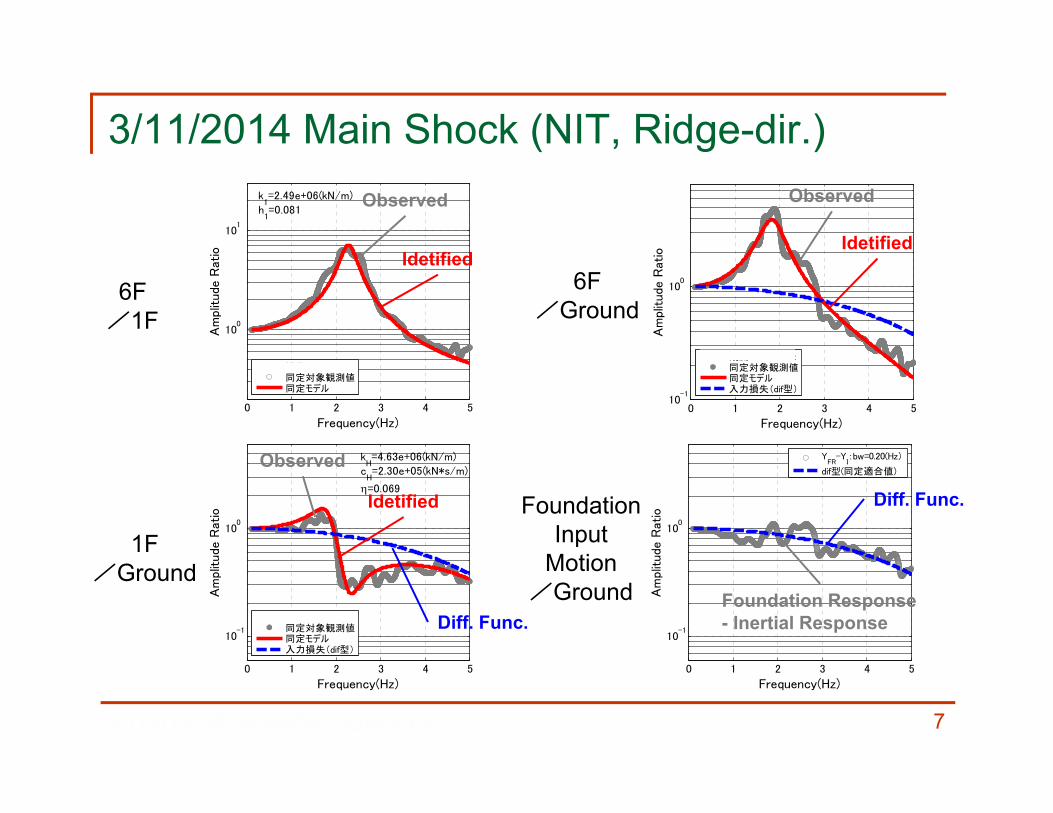
k1=2.49e+06(kN/m)
h1=0.081
観測:bw=0.20Hz同定対象観測値同定モデル
0 1 2 3 4 510
-1
100
Frequency(Hz)
Am
plitud
e R
atio
観測:bw=0.20Hz同定対象観測値同定モデル入力損失(dif型)
0 1 2 3 4 5
10-1
100
Frequency(Hz)
Am
plitud
e R
atio
kH=4.63e+06(kN/m)
cH=2.30e+05(kN*s/m)
=0.069
観測:bw=0.20Hz同定対象観測値同定モデル入力損失(dif型)
0 1 2 3 4 5
10-1
100
Frequency(Hz)
Am
plitud
e R
atio
YFR
-YI:bw=0.20(Hz)
dif型(同定適合値)
3/11/2014 Main Shock (NIT, Ridge-dir.)
7
6F/1F
6F/Ground
1F/Ground
Foundation Input
Motion/Ground Foundation Response
- Inertial Response
Diff. Func.
Observed
Idetified
Observed
Idetified
Observed
Idetified
Diff. Func.

0 1 2 3 4 510
-1
100
101
Frequency(Hz)
Am
plitud
e R
atio
k1=2.06e+06(kN/m)
h1=0.055
観測:bw=0.20Hz同定対象観測値同定モデル
0 1 2 3 4 510
-1
100
101
Frequency(Hz)
Am
plitud
e R
atio
観測:bw=0.20Hz同定対象観測値同定モデル入力損失(dif型)
0 1 2 3 4 5
10-1
100
Frequency(Hz)
Am
plitud
e R
atio
kH=6.77e+06(kN/m)
cH=1.47e+05(kN*s/m)
=0.073
観測:bw=0.20Hz同定対象観測値同定モデル入力損失(dif型)
0 1 2 3 4 5
10-1
100
Frequency(Hz)
Am
plitud
e R
atio
YFR
-YI:bw=0.20(Hz)
dif型(同定適合値)
4/11/2014 After-Shock (NIT, Ridge-dir.)
8
6F/1F
6F/Ground
1F/Ground
Foundation Input
Motion/Ground Foundation Response
- Inertial Response
Diff. Func.
Observed
Idetified
Observed
Idetified
Observed
Idetified
Diff. Func.

Transition of Stiffness and Damping (NIT, Ridge-dir.)
9
Stiffness Damping Coefficients
0.0E+00
2.0E+06
4.0E+06
6.0E+06
8.0E+06
1.0E+07
3/09(Fore) 3.11(Main) 3.11(After1)4.11(After2)
Stiffne
ss(kN/m
)
Building k1
Soil‐Foundation kHH
0.0E+00
2.0E+05
4.0E+05
6.0E+05
3/09(Fore) 3.11(Main) 3.11(After1) 4.11(After2)
Dam
ping
Coe
fficient
(kN*s/m
) Building c1
Soil‐Foundation cHHSoil-FoundationBuilding
Stiffness of building: has not recovered in after main-shock Stiffness of soil-spring: has recovered in after-shock Damping coefficient of soil-spring: has not recovered after main
shock
Soil-FoundationBuilding

Effect on Maximum Building Response
Adopt r.m.s. response (standard deviation) as substitute of maximum response Assumptions
Response is stationary random Peak factor is constant
Benefit Directory calculated by identified transfer functions and
parameters
10
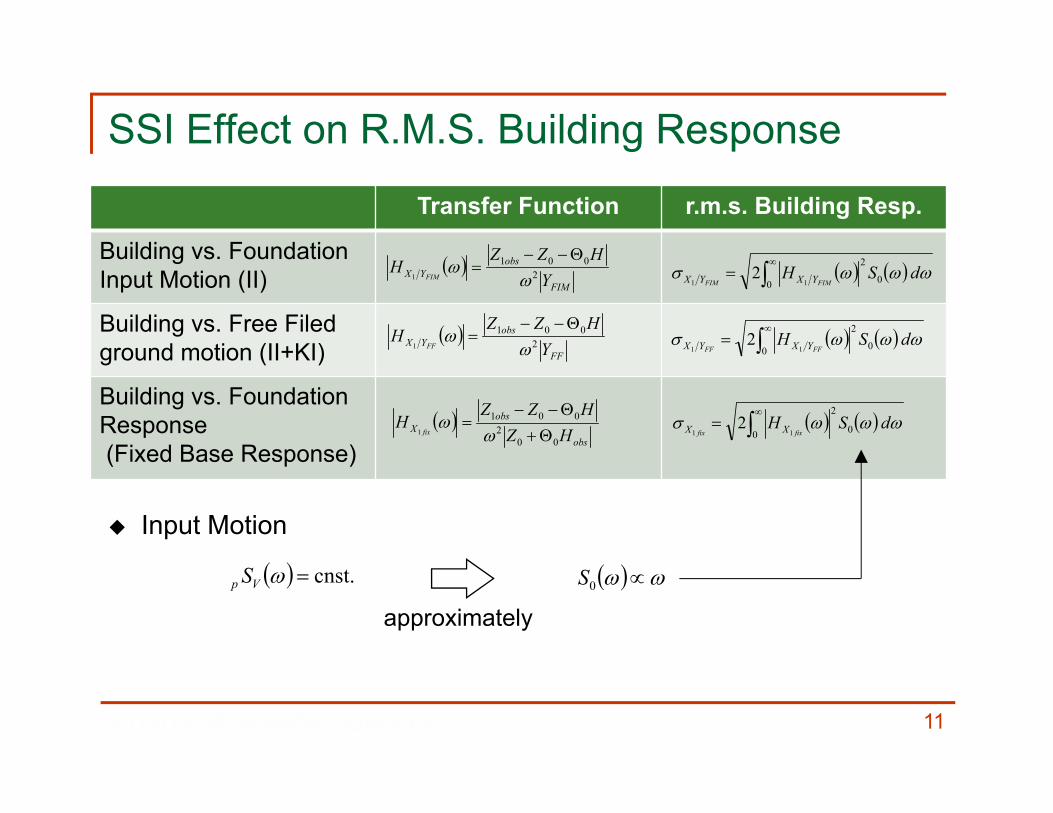
SSI Effect on R.M.S. Building Response
11
Transfer Function r.m.s. Building Resp.
Building vs. Foundation Input Motion (II)
Building vs. Free Filed ground motion (II+KI)
Building vs. Foundation Response(Fixed Base Response)
FIM
obsYX Y
HZZH
FIM 2001
1
FF
obsYX Y
HZZH
FF 2001
1
obs
obsX HZ
HZZH
fix00
2001
1
0 0
2
112 dSH
FIMFIM YXYX
0 0
2
112 dSH
FFFF YXYX
0 0
2
112 dSH
fixfix XX
cnst.Vp S 0S
Input Motion
approximately

Transition of SSI Effects (NIT, Ridge-dir.)
12
3/9(Fore) 3/11(Main) 3/11(After1)4/11(After2)0.0
0.2
0.4
0.6
0.8
1.0
Redu
ctio R
ate o
f r.m
.s. B
uild
ing
Resp
onse
Eq.(9): Inertial Interaction (II) Eq.(10): Kinematic Interaction (KI) Eq.(11): Inertial and Kinematic Interaction (II+KI)
Eq. Reduction by …
Kinematic Interaction (KI)
Inertial Interaction (II)
Kinematic Interaction+ Inertial Interaction (KI+II)
fixX
FIMX
1
1
fixX
FFX
1
1
FIMX
FFX
1
1
Reduction by KI is almost constant Reduction by II decreased after main shock

Conclusions
The stiffness of RC building has not recovered, but the soil spring stiffness has recovered gradually in after-shocks.
The response reductions by kinematic interaction (KI) have been almost constant in fore/main/after-shocks.
Contrary the response reductions by inertial interaction (II) have decreased after main shock.
13