detumblingand capturing strategies with eddy current brake...
TRANSCRIPT

Detumbling and Capturing Strategies with Eddy Current Brake System on Orbital Space Robot
Satoko AbikoDept. of Electrical Engineering,Shibaura Institute of Technology, Japansince April 2015
The Next Generation of Space Robotic Servicing TechnologiesIEEE International Conference on Robotics and Automation
May 26, 2015

Outline of the Talk
1. Background of the Research2. Detumbling Strategies with Eddy Current
Brake3. Performance Evaluation of Eddy Current
Brake System4. Detumbling Experiments with Dual-arm
System5. Conclusions

Introduction
Active Debris Removal (ADR)
Recovery mission of WESTAR‐VI(STS‐41‐B) (NASA).
Recovery mission of INTELSAT6 (NASA).
1. To avoid collisional cascading (Kessler Syndrome)2. To sustainably use space in future
Robotic technology is required to achieve it.

Past Activities for Grasping a Target
ETS‐VII Mission in Japan, Rendezvous‐Docking1997
Active Discussion in Japan for Debris Removal
2007
2009 International workshop for Active Debris Removal
Orbital Express in USA, Rendezvous‐Docking
ETS‐VII (JAXA)
Orbital Express (Boeing)
Many researches have been executed for ADR
DEOS (DLR) Space Infrastructure Servicing (MDA)
Various concepts have been proposed for grasping non‐cooperative target. But…
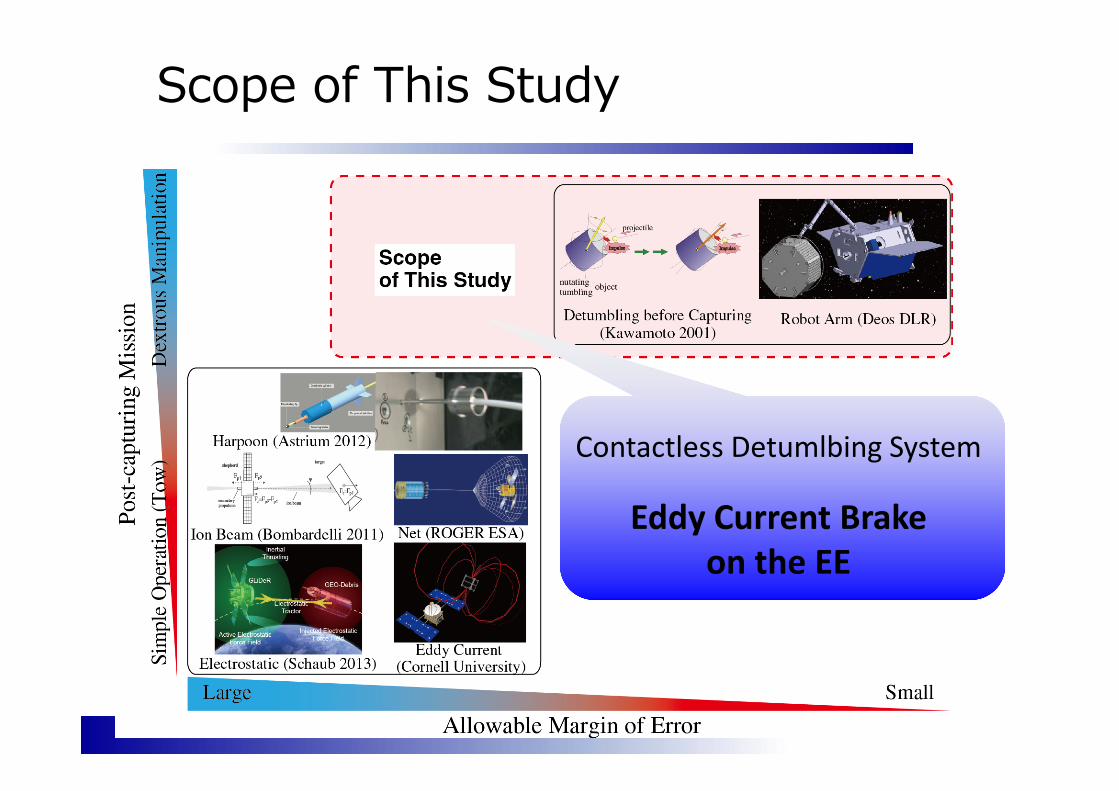
Scope of This Study
Contactless Detumlbing System
Eddy Current Brakeon the EE

Free Rotational Motion of Space Debris
[1] A. Nakajima, et. al “Space debris observation by ground‐based optical telescopes,” 2000.[2] D. Mehrholz, et. al “Detecting, tracking and imaging space debris,” 2002.
Observation data of ADEOS [2]
e.g. Second stage of Zenit rocket
• Spin velocity 8.8[°/s]• Nutation angle30 [°]• Nutation velocity 0.2 [°/s]
ADEOS-earth observing satellite• Rotational speed around base
body :0.1[°/s]• Rotational speed around a
boom:0.4[°/s]

Nutational Motion of a Target
Nutational motion.
Spin axis rotates around H with maintaining a certain angle: nutational angle θ

Grasping a Target by a Robot Arm
The Problem
How to detumble a large attitude change of the target
The approach only with robot manipulator system, Joint limitation of the robot arm Singularity Workspace constraints of the robot arm
The serial link manipulators have a limited capability to follow large attitude change of the tumbling target.
Before grasping a non‐coorprative target …,

The Approach of the Study
Distinguish translational motion and rotational motion of the end‐effector
Robot manipulator system • Mainly used to keep a distance
between the EE and the target
Eddy Current Brake (ECB) • Attached on the EE• Used to brake rotational motion

What is Eddy Current Brake (ECB) System ?
Principle of an eddy current brake.
When the rotating conductive object exposed to a magnetic field,
Detumbling method without physical contact
Eddy current is applied to disturb changing of magnetic field.
Force is applied to rotating object to brake a spinning motion.

Detumbling Operation with ECB• Detumbling nutational motion by changing H direction• Eddy current brake exerts f to the target
⇒Nutation angle changes with
Precession by an eddy current brake.

1. Space robot detumbles the target with ECBs on the EE of the robotic arms.
2. The ECB reduces a spinning rate.
3. Space robot captures the target by two arms.
Detumbling Strategy with ECB

Detumbling Simulation
Simulating detumblingoperation for more realistic targets.
Simulation model: Himawari 5(GMS-5) Initial condition
• Spinning rate: 10⺎/3[rad/s]• Nutational angle: 30 [°]• Angular momentum: along Z axis
GMS‐5 (JAXA).
Diameter: 2.15 [m]Height: 3.54 [m]Mass: 345 [kg]

Detumbling Simulation

Detumbling Strategy: One ECB case
Trajectory of spin axis and angular momentum (using one coil).

Detumbling Strategy: One ECB case
• Due to the reaction of the braking force, the space robot move away.
• To keep relative position with the target, the space robot consumes propellent.
Position.

• Problem: reaction force• Use two ECB and place
them opposite to each other
• Reaction forces are canceled
• Only getting reaction torque
• Angular momentum changes around initial direction in X axis
⇒ Two ECBs have to move in order to keep the distance
Detumbling Strategy with ECB
Trajectory of spin axis and angular momentum(using two coils).

Detumbling Strategy
• Position Change:O(10-7) [m]
• Impulse:O(10-2) [Ns] ⇒ 速度はO(10-5)[m/s]
Compared to the case with one ECB, the case with two ECB systems could cancel out the effect of the reaction force.
Impulse.
Position.

Design and Development of ECB
1st developed ECB 2nd Developed ECB
1. approx. 1.02[N] 2. Distributed Winding3. Magnetic saturation happened in the
yoke4. Eddy current loss happened
1. approx. 3.3‐4.0[N]2. Concentrated Winding3. Design the size of yoke with the
consideration of magnetic saturation4. Layered structure of yoke to avoid
eddy current loss

Field Oriented Control of ECB
ECB was developed based on Linear Inductance Motor.
CBF
With Relative Angular Velocity → Constant Braking Force (CBF)
Total braking force is constant.

Field Oriented Control of ECB
ECB was developed based on Linear Inductance Motor.
MBF
W/o Target Angular Velocity → Maximized Braking Force (MBF)
Maximum velocity of the magnetic field is used.

Performance Evaluation of ECB
1st developed ECB 2nd Developed ECB

Performance Evaluation of ECB
2nd developed ECBIn general, MBF approach generates larger braking force than that in the CBF approach
CBF: Constant Braking Force• Maintain constant braking force
despite changing angular velocity of the target
MBF: Maximized Braking Force• Braking force becomes larger
when angular velocity becomes larger
Slowing down with ECB

Mock of the Target
Mechanism 3 axis gimbal mechanism
Material Aluminum columnDiameter 296 [mm]Mass 18 [kg]Moment of Inertia Ratio ≧1
Maximum angle ±20 [deg.]

Detumbling Experiments with Robot Arms

Experimental Results
• Detumbling operation was achieved.
• Nutation angle converges to zero.
Spin angular velocity.
Spin axis trajectory.
Nutation angle.

• Active debris removal mission is required for sustainable space missions.
• Space robotic technology is one approach for the active debris removal.
• Grasping and detumbling operation is a key to achieve the above mission.
• Eddy current brake system is one promising technology to detumble the target.
Conclusions