development of a load model for men-induced loads on...
TRANSCRIPT

ABSTRACT: In recent years, an increasing tendency to lightweight and slender design of pedestrian structures as footbridges and staircases can be observed. This leads to an increase of the susceptibility of these structures in regard to dynamic action effects both in vertical and lateral direction. Present codes claim to consider the corresponding dynamic effects, however, usually without giving further instructions to the designing engineer. While for walking in the horizontal plane several load models are available, load models for ascending and descending stairs are scarce. The load patterns for climbing stairs and walking are significantly different and therefore, have to be considered in separate load models. For ascending a stair, there are two basic locomotion forms: climbing the stair step-by-step or taking two steps at once. These two locomotion forms lead to different load patterns with a different range of step frequencies. Basically, the loads induced by the left and right foot differ from each other. Neglecting these differences in the locomotion parameters will lead to a loss of important information. The basic aim of this study is to investigate the differences in the load processes ascending stairs step-by-step and taking two steps at once, descending stairs and compare the results to walking in the horizontal plane. Especially, the analysis focuses on the inter- and intra-individual differences in the load and locomotion parameters.
KEY WORDS: men-induced loads; stairs; walking.
1 INTRODUCTION
The aesthetic sense of modern architecture paired with an improved technical understanding has led to more and more slender pedestrian structures with increased spans in the last decades. Not only pedestrian bridges are concerned by this but also monumental stairs which are commonly used in many public areas and buildings, such as hotels, shopping centers and educational buildings. The slender and lightweight design of staircases results in a higher susceptibility against vibrations. Pedestrians are able to excite such slender structures by rhythmic activities like walking, running or jumping which may lead to serious dynamic reactions. Those men-induced vibrations may not only lead to an issue of the structural safety but also may affect the serviceability. In regard to serviceability aspects, most national and international standards recommend an upper limit for the experienced vibration of the users by implementing a specific threshold value to ensure a sufficient comfort level for all users. Present codes indicate to be aware of the corresponding dynamic effects, however, without giving further instructions to the designing engineer. Thus, the guidance for the designing engineer is still not sufficient to avoid problems regarding the serviceability. Research in the field of men-induced vibrations is mainly related to walking and running in the horizontal plane. However, studies dealing with ascending and descending stairs are scarce, although both locomotion forms differ significantly from walking. As stated in ISO 10137 [1], climbing stairs differs in both magnitude and frequency content from walking in the horizontal plane. The suggested load model therefore introduces as uniform load amplitude 1.1 the first harmonic. This leads to a very conservative design.
For the lateral direction, there are no design parameters available. Furthermore, it has been shown in [2] that the loads induced by the left and right foot differ from step to step for walking in the horizontal plane. Neglecting these differences in the locomotion parameters will lead to a loss of important information. Therefore, the basic aim of this study is to investigate the differences in the load processes ascending stairs step-by-step and taking two steps at once, descending stairs and walking in the horizontal plane. Especially, the analysis focuses on the inter- and intra-individual differences in the load and locomotion parameters. The basic biomechanics of ascending and descending stairs are presented in section 2 including the basic walking parameters and the basic load pattern for ascending and descending a stair step-by-step and ascending by taking two steps at once. Section 3 deals with the variability of the load amplitudes due to inter- and intra-individual differences. To investigate these differences, a second series of tests has been performed. The experimental setup and the following analysis of single steps are explained. The results of the analysis in terms of harmonic load amplitudes for the vertical and lateral direction can be found in section 4. Furthermore, the distributions of the step frequencies and step widths for all three locomotion forms are discussed. Bishop & Kerr published a paper [4] dealing with the harmonic load amplitudes in the vertical direction for ascending and descending a stair step-by-step by using the so-called biomechanical closure, i.e. by demanding that there is no difference in the loads induced by the left and right foot. Additionally, a series of tests has been performed to show the influence of the stair geometry on the harmonic load amplitudes of the vertical direction.
Development of a load model for men-induced loads on stairs
Benjamin Czwikla1, Michael Kasperski2
1,2Department of Civil and Environmental Science, Ruhr-Universität Bochum, 44780 Bochum, Germany email: [email protected], [email protected]
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014Porto, Portugal, 30 June - 2 July 2014
A. Cunha, E. Caetano, P. Ribeiro, G. Müller (eds.)ISSN: 2311-9020; ISBN: 978-972-752-165-4
1035

2 BASIC BIOMECHANICS
2.1 Basic walking parameters
The locomotion form walking can be characterized by a permanent ground contact with at least one foot on the ground. Additionally, there is a period of time where both feet touch the ground. The respective phases are named single stance and double stance phases, respectively. Generally, walking as a series of single steps can be described by an alternating process of single stance and double stance phases. A single step, consisting of a double and a single stance phase, is defined to start with a double stance phase and ends at the beginning of the next double stance phase. The basic individual step parameters to describe the process of walking are:
step frequency fs step length ls step width ws harmonic load amplitudes cn for n = 1, 2, 3, …
The step related walking speed is obtained from the product of step frequency fs and step length ls:
s s sv =f l (1)
Both parameters step frequency and step length will differ for each individual. However, during climbing stairs the parameter step length is restricted due to the stair geometry. Thus, the individual walking speed is only influenced by the step frequency. This leads to different harmonic load contributions if compared to walking. The second main difference between walking in the horizontal plane and walking on a stair is the height difference between two consecutive steps, leading to significant changes in the basic load pattern of the load time history.
2.2 Experimental setup
To identify the basic differences between walking in the horizontal plane, ascending and descending a stair, a first series of tests focuses on measuring the basic load patterns of a single foot. Therefore, a multi-component force plate by Kistler is used to obtain the orthogonal force components Fx, Fy and Fz (figure 1).
Figure 1. Kistler multi-component force plate and the corresponding definition of the load directions.
This device consists of a 60 cm x 90 cm stiff cover plate, supported by four three-component force sensors. The
position of the effective load in the x-y-plane can be determined by equilibrium conditions. For the analysis of ascending and descending, a wooden stair construction is placed on top of the force plate. This combined construction represents the first active step with a total height of 16 cm. The tread depth was chosen to 32 cm to fit the geometry of an existing stair which is used in the second series of tests. The stair geometry is within the range of the German recommendation DIN 18065 for the dimensioning of stairs [3]. A wooden frame of 32 cm height is used for the second step. This frame is supported only on the ground and has no connection to the force plate. Altogether, eight persons, seven male and one female person, were asked to participate in the experiments. Each person had to pass the stair test section four times to measure the single foot load pattern for the left and right foot for ascending and descending the stair. For a better comparison of the basic load pattern of each test person, the results are normalized by the body weight. Therefore, before each test run, the test person was asked to climb the force plate and remain there several seconds to identify the body weight.
2.3 Basic load pattern
The load trace of a single foot for the locomotion form walking in the horizontal plane can mainly be described by five characteristic points (figure 2). Each of these characteristic points can be explained by the chronology of the motion of the foot during a single step.
Figure 2. Normalized single foot load pattern for walking in the horizontal plane [?].
The first characteristic point (A) represents the beginning of a single step where the heel is attached on the ground. The first maximum (B) marks the point of transferring the whole weight onto the heel of the leading leg. During this phase f shifting the weight to the front foot, the motion can be described by a controlled phase of free falling, typically leading to amplitudes larger than the body weight. Then, the knees will be bended and the opposite leg swings to the front (C) before pushing oneself off with the toes which leads to the second maximum (D). The last characteristic point marks the end of the ground contact of the corresponding foot (E). Similar phases can be identified for ascending and descending stairs. However, due to the height difference between two consecutive steps and the forced step length, the basic load patterns differ significantly. In figure 3, the basic load patterns of the left and right foot of a single person are compared for
A
B
C
D
E
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1036

ascending and descending a stair. As stated in [2], it has to be distinguished between the left and right foot for the walking process, i.e. the strong and weak leg, respectively. It could be shown that almost every person has a strong and a weak leg. While for walking in the horizontal plane the differences between the left and right foot mainly can be identified for the walking parameters step length and step frequency, for climbing stairs these differences lead mainly to modulations in the basic load pattern and a variation in the step frequency (figure 3). Generally, ascending a stair leads to two local maxima and one local minimum in between, similar to walking in the horizontal plane. However, during the initial phase, usually a small peak can be observed. This is due to the fact that the test person attaches his foot on the step and rolls it off before pushing the body off. Additionally, the second peak is slightly shifted and more peaked than for walking. The comparison of the basic load pattern for ascending the stair with the left and the right foot reveals that the load difference during the push-up phase, i.e. the time between the local minimum and the second local maximum, is enlarged for the left foot. The difference between these local extreme values rises from ∆F = 0.45 for the right foot to ∆F = 0.65 for the left foot. Obviously, the basic load pattern induced by the right foot of the test person leads to a more energy-efficient motion.
Figure 3. Measured load pattern for ascending and descending a stair for the weak and strong leg.
The basic load pattern for descending a stair shows a considerably larger first maximum and a second maximum which is only slightly larger than the minimum amplitude. When comparing the traces for the left and right foot, it can be noticed that the basic load pattern of the right foot shows a sharp peak at the beginning of the first local maximum resulting from a strong impact. Due to the fact that the right
foot is placed on the active step, the left foot has to transfer the weight down on the next step. For the left foot the initial peak is damped. The whole trace appears to be smoother. It can be concluded that the identification of the strong and weak leg rather has to be based on the load traces than on the locomotion parameters. For ascending the stair, the strong leg leads to the smoother load curve which characterizes the more energy-efficient motion. For descending the stair, the strong leg leads to larger impact amplitudes because the weak leg has transfers the weight down to the next step much faster. During initial studies predominantly male persons preferred ascending the stair by taking two steps at once. The accompanying skipping of one step leads to differences in the basic load pattern as well as to a fairly different range of the step frequency. On the other hand, the tests suggest that descending the stair by taking two steps at once seems to be a rather unnatural locomotion. In figure 3, the basic load pattern of a single person ascending the stair by taking two steps at once with both weak and strong leg is shown.
Figure 4. Measured load pattern for ascending a stair by taking two steps at once for the weak and strong leg.
The basic load patterns look similar to those for ascending a stair step-by-step when drawing it against the normalized time axis. Again, the basic load pattern for the strong leg attends to be smoother and the initial peak disappears almost completely. Due to the longer step length, the step frequency range will differ from the locomotion forms of ascending and descending step-by-step. Therefore, it is reasonable to investigate the locomotion of ascending a stair by taking two steps at once for the development of a consistent load model.
3 VARIABILITY OF LOAD AMPLITUDES
3.1 Experimental setup
Beside the differences resulting from different locomotion forms, the study aims in analyzing the influence of the loads induced by the left and right foot during the locomotion of climbing stairs. Thus, the load time history of consecutive steps has to be measured. Therefore, a wooden stair test section was build and used as an extension of an existing stair (figure 5). The stair geometry, i.e. step length and stair rise, are adopted from the existing stair to guarantee an undisturbed locomotion. For the same reason a lead-in and lead-out section with sufficient length was used to avoid a changing locomotion behavior before reaching or after leaving the stair test section.
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1037
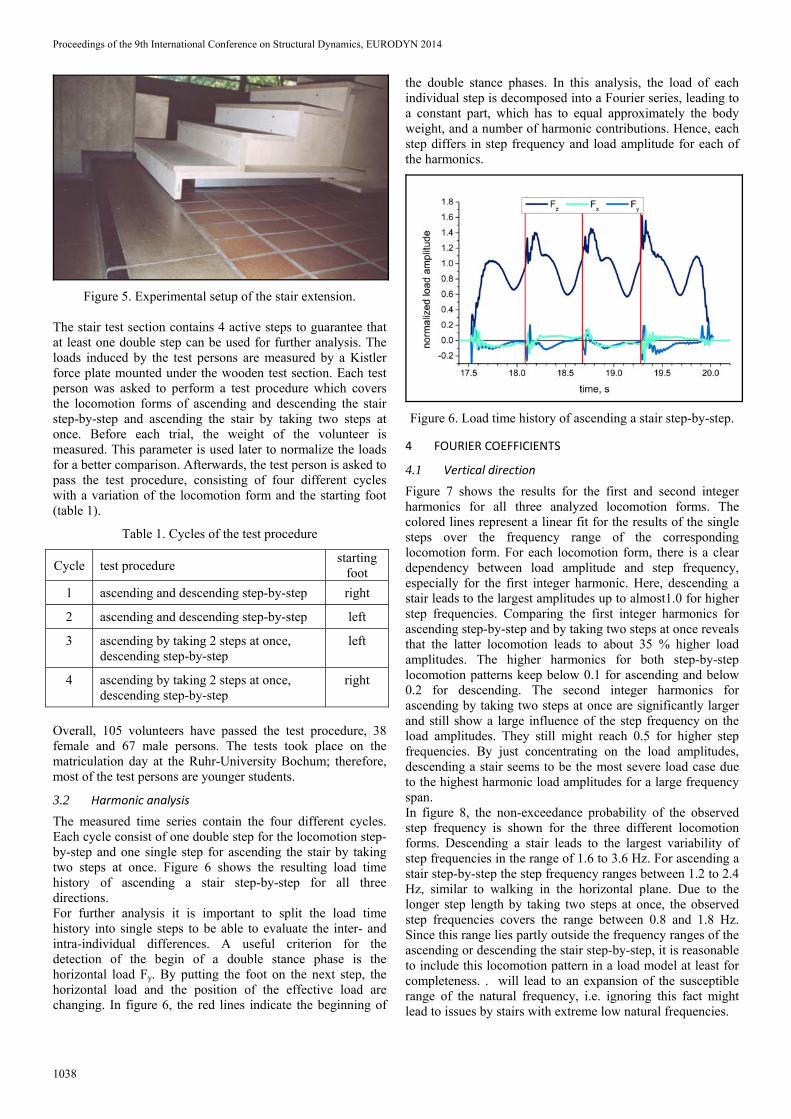
Figure 5. Experimental setup of the stair extension. The stair test section contains 4 active steps to guarantee that at least one double step can be used for further analysis. The loads induced by the test persons are measured by a Kistler force plate mounted under the wooden test section. Each test person was asked to perform a test procedure which covers the locomotion forms of ascending and descending the stair step-by-step and ascending the stair by taking two steps at once. Before each trial, the weight of the volunteer is measured. This parameter is used later to normalize the loads for a better comparison. Afterwards, the test person is asked to pass the test procedure, consisting of four different cycles with a variation of the locomotion form and the starting foot (table 1).
Table 1. Cycles of the test procedure
Cycle test procedure starting
foot
1 ascending and descending step-by-step right
2 ascending and descending step-by-step left
3 ascending by taking 2 steps at once, descending step-by-step
left
4 ascending by taking 2 steps at once, descending step-by-step
right
Overall, 105 volunteers have passed the test procedure, 38 female and 67 male persons. The tests took place on the matriculation day at the Ruhr-University Bochum; therefore, most of the test persons are younger students.
3.2 Harmonic analysis
The measured time series contain the four different cycles. Each cycle consist of one double step for the locomotion step-by-step and one single step for ascending the stair by taking two steps at once. Figure 6 shows the resulting load time history of ascending a stair step-by-step for all three directions. For further analysis it is important to split the load time history into single steps to be able to evaluate the inter- and intra-individual differences. A useful criterion for the detection of the begin of a double stance phase is the horizontal load Fy. By putting the foot on the next step, the horizontal load and the position of the effective load are changing. In figure 6, the red lines indicate the beginning of
the double stance phases. In this analysis, the load of each individual step is decomposed into a Fourier series, leading to a constant part, which has to equal approximately the body weight, and a number of harmonic contributions. Hence, each step differs in step frequency and load amplitude for each of the harmonics.
Figure 6. Load time history of ascending a stair step-by-step.
4 FOURIER COEFFICIENTS
4.1 Vertical direction
Figure 7 shows the results for the first and second integer harmonics for all three analyzed locomotion forms. The colored lines represent a linear fit for the results of the single steps over the frequency range of the corresponding locomotion form. For each locomotion form, there is a clear dependency between load amplitude and step frequency, especially for the first integer harmonic. Here, descending a stair leads to the largest amplitudes up to almost1.0 for higher step frequencies. Comparing the first integer harmonics for ascending step-by-step and by taking two steps at once reveals that the latter locomotion leads to about 35 % higher load amplitudes. The higher harmonics for both step-by-step locomotion patterns keep below 0.1 for ascending and below 0.2 for descending. The second integer harmonics for ascending by taking two steps at once are significantly larger and still show a large influence of the step frequency on the load amplitudes. They still might reach 0.5 for higher step frequencies. By just concentrating on the load amplitudes, descending a stair seems to be the most severe load case due to the highest harmonic load amplitudes for a large frequency span. In figure 8, the non-exceedance probability of the observed step frequency is shown for the three different locomotion forms. Descending a stair leads to the largest variability of step frequencies in the range of 1.6 to 3.6 Hz. For ascending a stair step-by-step the step frequency ranges between 1.2 to 2.4 Hz, similar to walking in the horizontal plane. Due to the longer step length by taking two steps at once, the observed step frequencies covers the range between 0.8 and 1.8 Hz. Since this range lies partly outside the frequency ranges of the ascending or descending the stair step-by-step, it is reasonable to include this locomotion pattern in a load model at least for completeness. . will lead to an expansion of the susceptible range of the natural frequency, i.e. ignoring this fact might lead to issues by stairs with extreme low natural frequencies.
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1038

Figure 7. First and second integer harmonic load amplitudes for ascending and descending.
Figure 8. Non-exceedance probabilities of the step frequency.
4.2 Comparison to the results of Bishop & Kerr
One of the few studies dealing with men-induced loads on stairs has been published by Bishop & Kerr in 2001 [4]. Here, the load time history of a single foot is measured at the fourth step of a stair test section with three passive steps as lead-in and lead-out section, where similar load patterns as in chapter 2 are obtained. To reconstruct the load time history of a single step, consisting of a single stance and a double stance phase, the so-called biomechanical closure is used, i.e. by demanding that the integral of the force over the step period has to equal the body weight:
ST!
t 0
F(t) dt G
(2)
The corresponding step period and step frequency is obtained from:
s 1 dsp
s s
T T t
f = 1 T
(3)
T1 - contact time of one foot tdsp - duration of the double-stance phase The load trace of the double-stance phase is obtained from the superposition of the beginning and the end of the measured load time history (figure 9). Based on this, the duration of the two-foot-stand phase can be calculated assuming that the load F(t) has to equal the body weight G:
dsp1 1 1 dsp
dsp 1 dsp1
t tF (t) F (T t t)F(t)
t t T tF (t)
(4)
F1(t) - footfall trace induced by one foot
0.00
0.25
0.50
0.75
1.00
1.25
1.50
0.1 0.2 0.3 0.4 0.5 0.6 0.70time, [s]
Fz (t) / G
step period Ts
tdsp tdsp
area = 1
tssp
load trace of a single foot T1
!
Figure 9. Biomechanical closure approach.
The measurements of Bishop & Kerr led to 500 load time histories of single steps obtained for 23 male and 2 female persons. The volunteers were asked to change the step frequency for each run.
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1039

A comparison of the results of both measurements only makes sense if the basic geometric parameters of the stair test section are comparable. The stair test section of Bishop & Kerr allows two different inclinations, 22° and 33° respectively. The corresponding values for the geometric parameters step length and step height are listed in table 2. The geometric values of the EKIB stair test section are lying right in between of those one for both inclinations of the stair test section of Bishop & Kerr, i.e. the results for both measurements can be assumed to be sufficiently comparable. Figure 10 show the results of both measurements for the normalized first integer harmonic load amplitudes for ascending and descending step-by-step, respectively. The results of the EKIB measurement seem to be in perfect agreement to the findings of Bishop & Kerr.
Table 2. Dimensions of the stair test sections
Test section Step length [cm] Step height [cm] Bishop & Kerr 22° inclination 34.0 13.5
EKIB 27° Inclination
32.0 16.0
Bishop & Kerr 22° inclination
28.0 18.0
Figure 10. Comparison of the 1st harmonic load amplitudes for ascending & descending of Bishop & Kerr and EKIB ( )
As for the stair geometry, the EKIB data can be found in the middle of the data achieved for both inclinations of the stair test section Bishop & Kerr used. So, it can be concluded that the incorrect assumption of equal loads for both feet does not
lead to biased harmonic load amplitudes. Nevertheless, applying the biomechanical closure leads to a loss of important information and a neglecting of the existing sub- and intermediate harmonics [5]. Approaches using only integer harmonics of single steps may fail to predict the corresponding excitations.
4.3 Influence of the stair geometry
So far, it is possible to identify an influence of the step frequency on the load amplitudes for the vertical direction but, the tread depth and stair rise dimensions of the staircase may influence the load amplitudes of the first harmonics, too. To verify this assumption a third series of tests has been performed with a stair test section with adjustable stair rise and tread depth dimensions. The stair test section is similar to the first series of tests, i.e. by using a force plate to measure the load time history of a single step. Since the incorrect assumption of equal loads for both feet does not lead to biased harmonic load amplitudes, the biomechanical closure can be used to calculate the integer harmonic load amplitudes. Most stairs are constructed by using an ergonomic relationship between tread and riser dimensions to guarantee a comfortable gait. The German standard DIN 18065 recommends that two times the stair rise plus the tread depth shall equal the mean step length of a person which is in a range of 590 to 660 mm [3]:
2 s + a = 590 660 mm (5)
s – Stair rise a – Tread depth
In figure 11, the recommended values of [1] for the stair geometry are drawn. The dots mark the analyzed stair geometries. Figure 12 illustrates the first harmonic load amplitudes of a single test person for ascending the stair step-by-step for each stair geometry and foot. As seen for the results of Bishop and Kerr [4] and the EKIB data, the harmonic load amplitudes show a clear dependency on the step frequency.
Figure 11. Recommendation of stair dimensions.
In a first approach, the results can be fitted by a straight line. Furthermore, the mean step frequency differs considerably for the left and right foot of the test person which underlines that the assumption of perfectly equal load patterns for both feet is incorrect and will lead to an underestimation of the sub- and intermediate harmonic content.
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1040
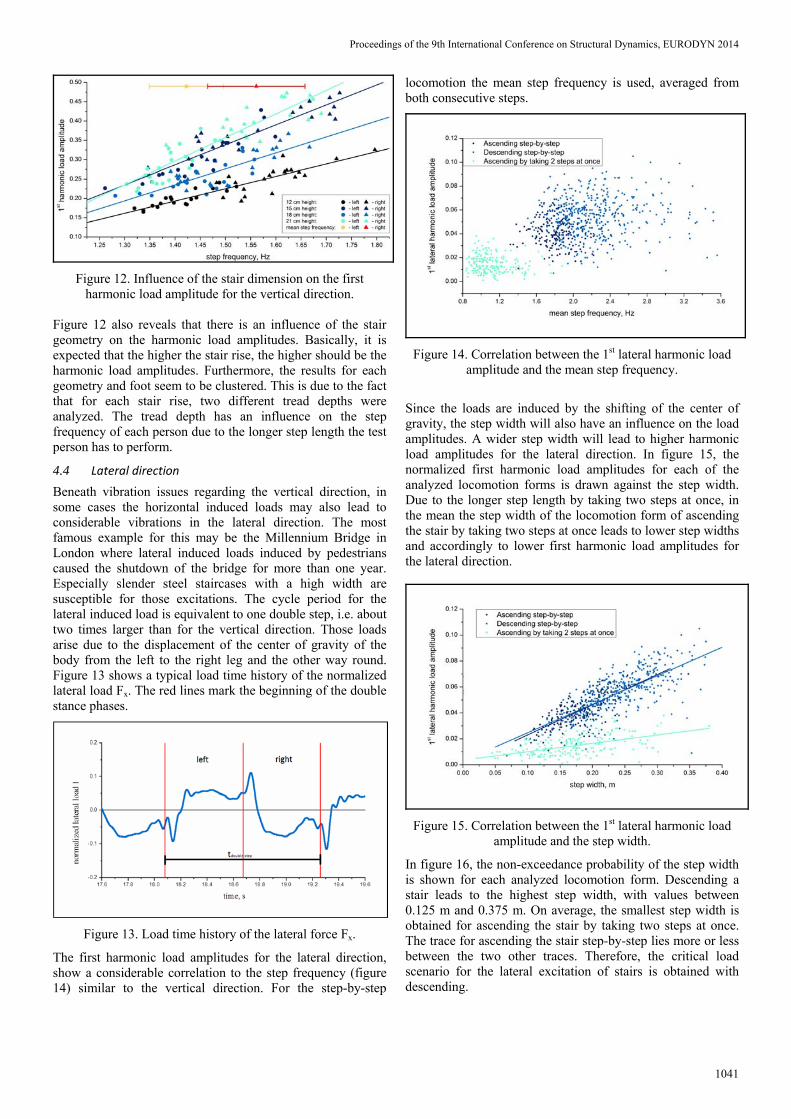
Figure 12. Influence of the stair dimension on the first harmonic load amplitude for the vertical direction.
Figure 12 also reveals that there is an influence of the stair geometry on the harmonic load amplitudes. Basically, it is expected that the higher the stair rise, the higher should be the harmonic load amplitudes. Furthermore, the results for each geometry and foot seem to be clustered. This is due to the fact that for each stair rise, two different tread depths were analyzed. The tread depth has an influence on the step frequency of each person due to the longer step length the test person has to perform.
4.4 Lateral direction
Beneath vibration issues regarding the vertical direction, in some cases the horizontal induced loads may also lead to considerable vibrations in the lateral direction. The most famous example for this may be the Millennium Bridge in London where lateral induced loads induced by pedestrians caused the shutdown of the bridge for more than one year. Especially slender steel staircases with a high width are susceptible for those excitations. The cycle period for the lateral induced load is equivalent to one double step, i.e. about two times larger than for the vertical direction. Those loads arise due to the displacement of the center of gravity of the body from the left to the right leg and the other way round. Figure 13 shows a typical load time history of the normalized lateral load Fx. The red lines mark the beginning of the double stance phases.
Figure 13. Load time history of the lateral force Fx.
The first harmonic load amplitudes for the lateral direction, show a considerable correlation to the step frequency (figure 14) similar to the vertical direction. For the step-by-step
locomotion the mean step frequency is used, averaged from both consecutive steps.
Figure 14. Correlation between the 1st lateral harmonic load amplitude and the mean step frequency.
Since the loads are induced by the shifting of the center of gravity, the step width will also have an influence on the load amplitudes. A wider step width will lead to higher harmonic load amplitudes for the lateral direction. In figure 15, the normalized first harmonic load amplitudes for each of the analyzed locomotion forms is drawn against the step width. Due to the longer step length by taking two steps at once, in the mean the step width of the locomotion form of ascending the stair by taking two steps at once leads to lower step widths and accordingly to lower first harmonic load amplitudes for the lateral direction.
Figure 15. Correlation between the 1st lateral harmonic load amplitude and the step width.
In figure 16, the non-exceedance probability of the step width is shown for each analyzed locomotion form. Descending a stair leads to the highest step width, with values between 0.125 m and 0.375 m. On average, the smallest step width is obtained for ascending the stair by taking two steps at once. The trace for ascending the stair step-by-step lies more or less between the two other traces. Therefore, the critical load scenario for the lateral excitation of stairs is obtained with descending.
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1041

Figure 16. Traces of the non-exceedance probability of the step width.
5 SUMMARY AND CONCLUSIONS
Although, vibrations issues of pedestrian structures are known since several years, there is still a lack of knowledge in part of this research topic. Most studies focus on the locomotion in the horizontal plane and there are only few studies dealing with ascending and descending stairs. In this paper, the results of the Research Team EKIB are presented, leading to the following conclusions:
Beside the locomotion of climbing stairs step-by-step, especially male persons tend to ascend a stair by taking two steps at once.
The locomotion pattern of taking two steps at once is not covered yet in actual codes, although the load amplitudes for the first two integer harmonics are much higher compared to ascending a stair step-by-step.
Taking two steps at once lead to a more than 40 % higher walking speed compared to the locomotion of ascending step-by-step.
The results of the study done by Bishop & Kerr for the load amplitudes in vertical direction are in reasonable agreement with the results of the measurement performed by the Research Team EKIB, i.e. the incorrect assumption of equal loads for both feet probably does not lead to biased harmonic load amplitudes.
The use of the biomechanical closure may fail to predict the excitation at sub- and intermediate harmonics.
It could be shown that there is a need to consider the stair dimensions to the load model because of the strong correlation of the stair dimension to the first harmonic load amplitude, i.e. a higher stair rise will lead to higher harmonic load amplitudes.
So far, there is no load model dealing with the lateral loads, although especially slender steel staircases may tend to be susceptible in this direction.
There is a clear correlation between the first lateral harmonic load amplitude and the step width observable.
ACKNOWLEDGEMENTS
Part of this work has been sponsored by the German Research Foundation under the contract number KA675/13-1. This support is gratefully acknowledged. REFERENCES
[1] ISO 10137:2007
Bases for design of structures — Serviceability of buildings and walkways against vibration, May 2007 [2] C. Sahnaci and M. Kasperski, Random loads induced by walking,
Eurodyn 2005 Proceedings, Paris, September 2005, pp 441-446.
[3] DIN 18065:2011 Stairs in buildings – Terminology, measuring rules, main dimensions, June 2011.
[4] S.C. Kerr and N.W.M. Bishop, Human induced loading on flexible staircases, Engineering Structures, 23, 37-45, 2001
[5] B.Czwikla and M. Kasperski, Men-induced loads on stairs, Eurodyn 2011 Proceedings, Leuven, September 2011, pp 949-956.
Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1042