development of analysis tools for certification of flight control laws fa9550-05-1-0266, april...
TRANSCRIPT
Development of Analysis Tools for Certification of Flight Control Laws
FA9550-05-1-0266, April 05-November 07
ParticipantsUCB: Ufuk Topcu, Weehong Tan, Tim Wheeler, Andy Packard
Honeywell: Pete Seiler
UMN: Gary Balas
Websitehttp://jagger.me.berkeley.edu/~pack/certify
http://jagger.me.berkeley.edu/~pack/certificates
Copyright 2007, Packard, Topcu, Tan, Wheeler, Seiler and Balas. This work is licensed under the Creative Commons Attribution-ShareAlike License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/2.0/ or send a letter to Creative Commons, 559 Nathan Abbott Way, Stanford, California 94305, USA.

Tools for Quantitative, Local Nonlinear AnalysisFocus
– Region-of-attraction estimation
– induced norms
– induced norms
for locally stable, finite-dimensional nonlinear systems, with
– polynomial vector fields
– parameter uncertainty (also polynomial)
Main Tools: Lyapunov, with– Sum-of-squares proofs to ensure
nonnegativity and set containment
– Semidefinite programming (SDP), Bilinear Matrix Inequalities (BMI)
• Interface: YALMIP, SOStools• SDP solvers: Sedumi• BMIs: PENBMI
– Constraints provided by simulation
22 LL LL2
Comparison to Literature–Only method to incorporate both simulation and
certificates of stability
–Superior to other general purpose methods
Doing examples, gaining experience–2, 3, 4, 5 and 6-d examples
–http://jagger.me.berkeley.edu/~pack/certificates
–Simulation: practical, informative, does aid the search for Lyapunov functions to certify an ROA
Pragmatic Goal–A feasible path towards attacking problems with,
eg., 10 states, 5 uncertainties, and cubic (in state) vector fields
Naïve/blind reliance on parameter-dependent Lyapunov functions. New strategy
–Exploit complete understanding in linear case–Employ simulation data
Largely unsuccessful. Recognize inefficiency in our naïve/blind reliance on SOS, etc
–Parameter-Independent Lyapunov functions (“quadratic stability” from late 80’s)
–Branch & Bound in uncertainty space
2005 approach to parameter uncertainty cannot extend
Payoff: quantitative analysis where– Insufficient domain-specific knowledge
• no experience to rely on linear analysis
– performance is being pushed to the limit • approximations associated with linear
analysis are not suitable
Estimating Region of Attraction
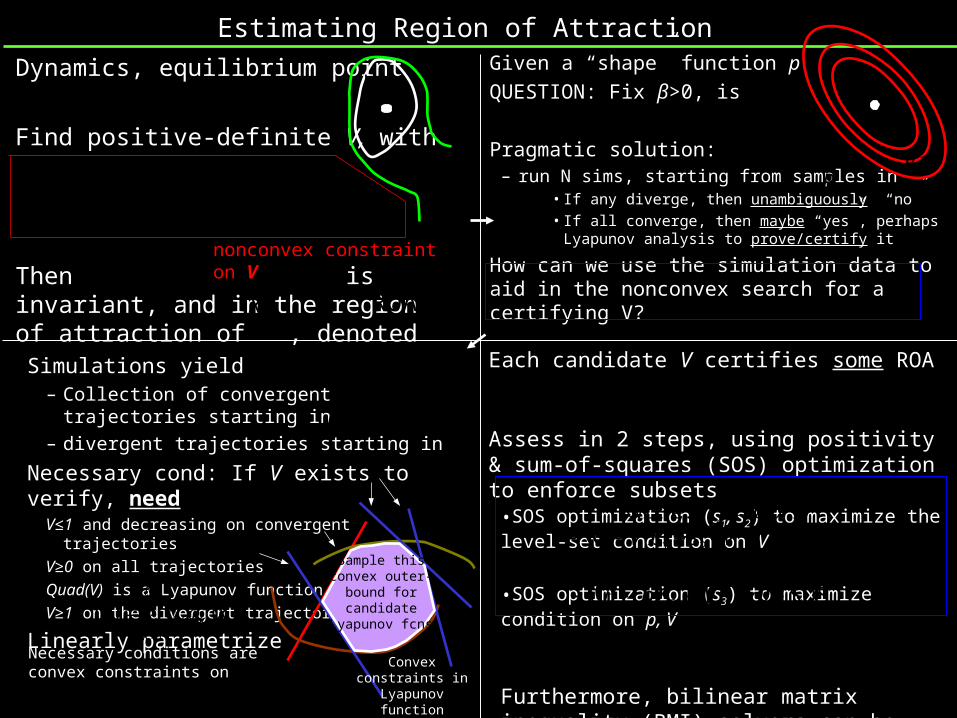
Dynamics, equilibrium point
Find positive-definite V, with
Then is invariant, and in the region of attraction of , denoted
0)(),( xfxfx
01)(,: fVx:xVxxx
bounded is 1,0 x:V(x)xV
1x:V(x)
0fdx
dV
1V
x
x xROA
nonconvex constraint on V
Given a “shape” function p
QUESTION: Fix β>0, is
Pragmatic solution:– run N sims, starting from samples in
• If any diverge, then unambiguously “no”• If all converge, then maybe “yes”, perhaps Lyapunov
analysis to prove/certify it
How can we use the simulation data to aid in the nonconvex search for a certifying V?
xROA )(:: xpxP
P
3p
x
2p
1p
Simulations yield– Collection of convergent trajectories starting in
– divergent trajectories starting in
Necessary cond: If V exists to verify, needV≤1 and decreasing on convergent trajectories
V≥0 on all trajectories
Quad(V) is a Lyapunov function for Linear(f)
V≥1 on the divergent trajectories
Linearly parametrize
PcP
Necessary conditions are convex constraints on
bN
kkk xxV
1
)()(
bNRConvex constraints in
Lyapunov function coefficient-space
Sample this convex outer-
bound for candidate
Lyapunov fcns
Each candidate V certifies some ROA
Assess in 2 steps, using positivity & sum-of-squares (SOS) optimization to enforce subsets
•SOS optimization (s1, s2) to maximize the level-set condition on V
•SOS optimization (s3) to maximize condition on p, V
Furthermore, bilinear matrix inequality (BMI) solvers can be initialized with these, and further optimization (adjusting V too) be performed.
0)(:)(:)(:
max:,
xVxxVxxpxVcert
satisfying that such
SOS 221 lfVssV
SOS Vsp 3
xxl T62 10: e.g., with,
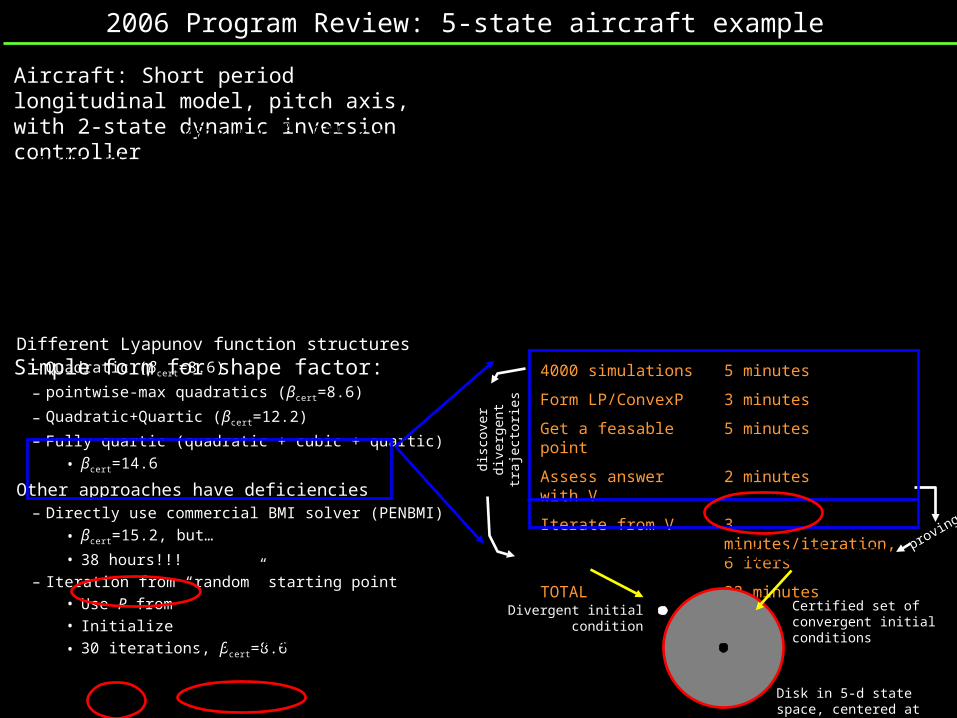
2006 Program Review: 5-state aircraft example
Aircraft: Short period longitudinal model, pitch axis, with 2-state dynamic inversion controller
Simple form for shape factor:
0
054.011.005.0
22.015.44.08.
)( 2332
22
3232
2221
2 zzzz
zzzzzz
uzBAzz
001
02.64.91.
56.3.13
A
q
z
Different Lyapunov function structures– Quadratic (βcert=8.6)
– pointwise-max quadratics (βcert=8.6)
– Quadratic+Quartic (βcert=12.2)
– Fully quartic (quadratic + cubic + quartic)
• βcert=14.6
Other approaches have deficiencies– Directly use commercial BMI solver (PENBMI)
• βcert=15.2, but…
• 38 hours!!!– Iteration from “random” starting point
• Use P from• Initialize
• 30 iterations, βcert=8.6
4000 simulations 5 minutes
Form LP/ConvexP 3 minutes
Get a feasable point 5 minutes
Assess answer with V 2 minutes
Iterate from V 3 minutes/iteration, 6 iters
TOTAL 33 minutes
ROA 6.14)(: xpx9.16)( 0 xp
disc
over
div
erge
nt
traj
ecto
ries
proving
TT zzxp :)(
IPAPAT
5
1
4001.0)(i i
T xPxxxV
Divergent initial condition Certified set of convergent initial conditions
Disk in 5-d state space, centered at equilibrium point
4.0
04.035.1
)(2
2
z
zB
3
1
28.75.
02.06.
00
09.6.z
z 21 2.2 u
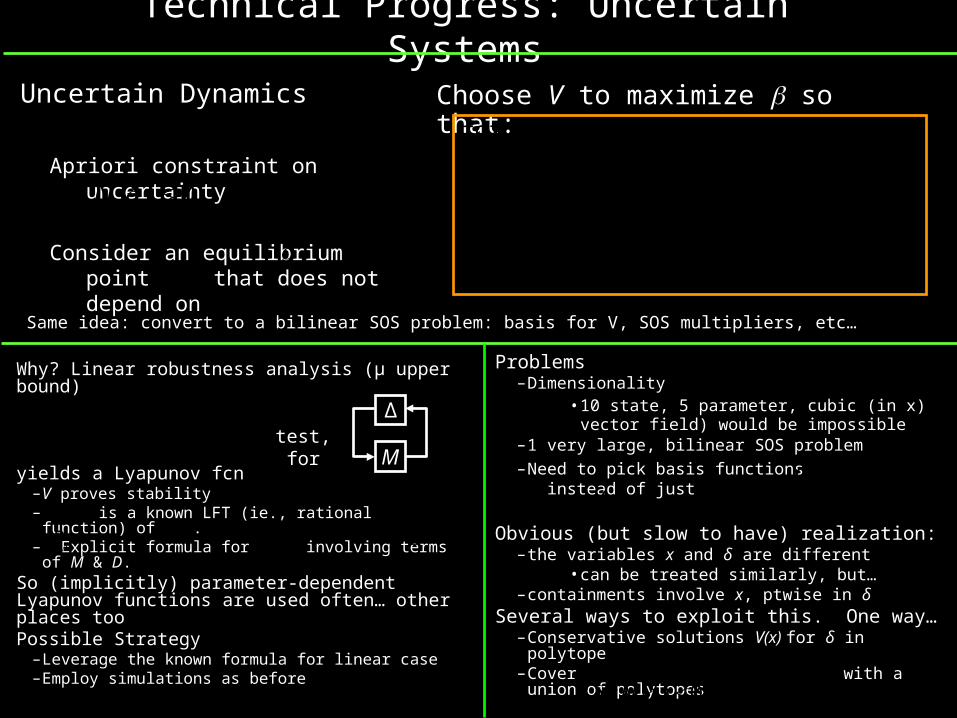
Problems–Dimensionality
• 10 state, 5 parameter, cubic (in x) vector field) would be impossible
–1 very large, bilinear SOS problem–Need to pick basis functions instead of
just
Obvious (but slow to have) realization:–the variables x and δ are different
• can be treated similarly, but…–containments involve x, ptwise in δ
Several ways to exploit this. One way…–Conservative solutions V(x) for δ in polytope–Cover with a union of polytopes
Why? Linear robustness analysis (µ upper bound)
yields a Lyapunov fcn–V proves stability– is a known LFT (ie., rational function) of .– Explicit formula for involving terms of M & D.
So (implicitly) parameter-dependent Lyapunov functions are used often… other places tooPossible Strategy
–Leverage the known formula for linear case–Employ simulations as before
Technical Progress: Uncertain Systems
Uncertain Dynamics
Apriori constraint on uncertainty
Consider an equilibrium point that does not depend on
),( xi
),( xfx
0)( N
Choose V to maximize so that:
0),(1),(,: xfx
Vx:xVxxx
1,)(: )x:V(xxpx
0)( N satisfying each for
definite positive is ),( V
Same idea: convert to a bilinear SOS problem: basis for V, SOS multipliers, etc…
M
Δtest, for
)()()( 1 sDsMsD
xPxxV T),(
P
x
P
)(xi
0)(: N
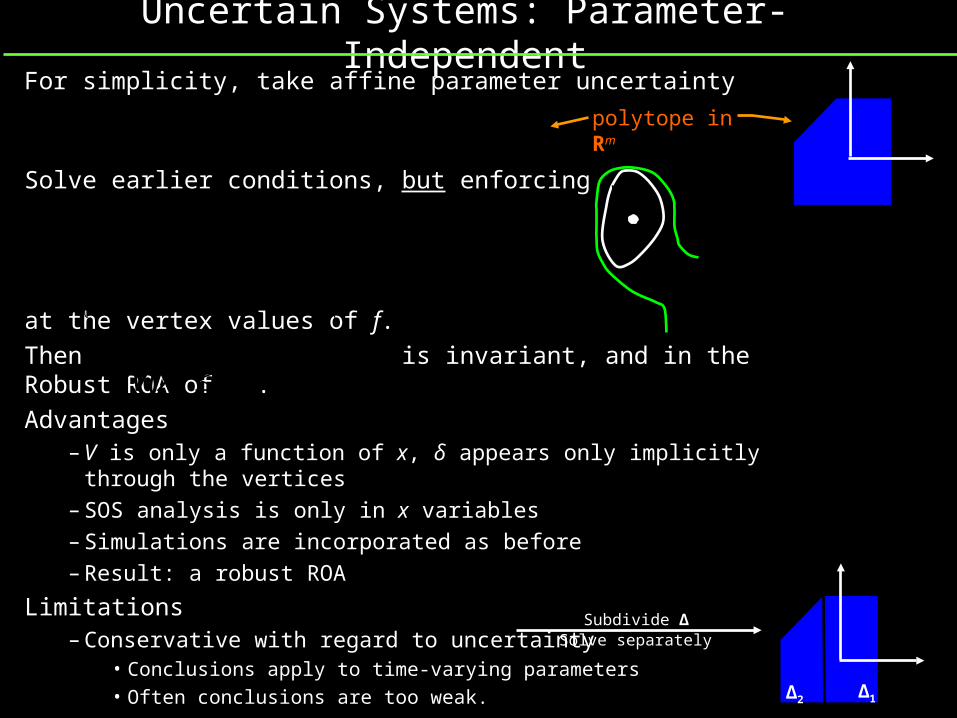
Uncertain Systems: Parameter-IndependentFor simplicity, take affine parameter uncertainty
Solve earlier conditions, but enforcing
at the vertex values of f.
Then is invariant, and in the Robust ROA of .
Advantages– V is only a function of x, δ appears only implicitly through the vertices
– SOS analysis is only in x variables
– Simulations are incorporated as before
– Result: a robust ROA
Limitations– Conservative with regard to uncertainty
• Conclusions apply to time-varying parameters• Often conclusions are too weak.
Δ ,)()(0 txtxftx
1x:V(x)
01)(,:
01)(,:
][
]1[
VnfVx:xVxxx
fVx:xVxxx
0f
dx
dV
1V
x
polytope in Rm
x
Subdivide ΔSolve separately
Δ1Δ2
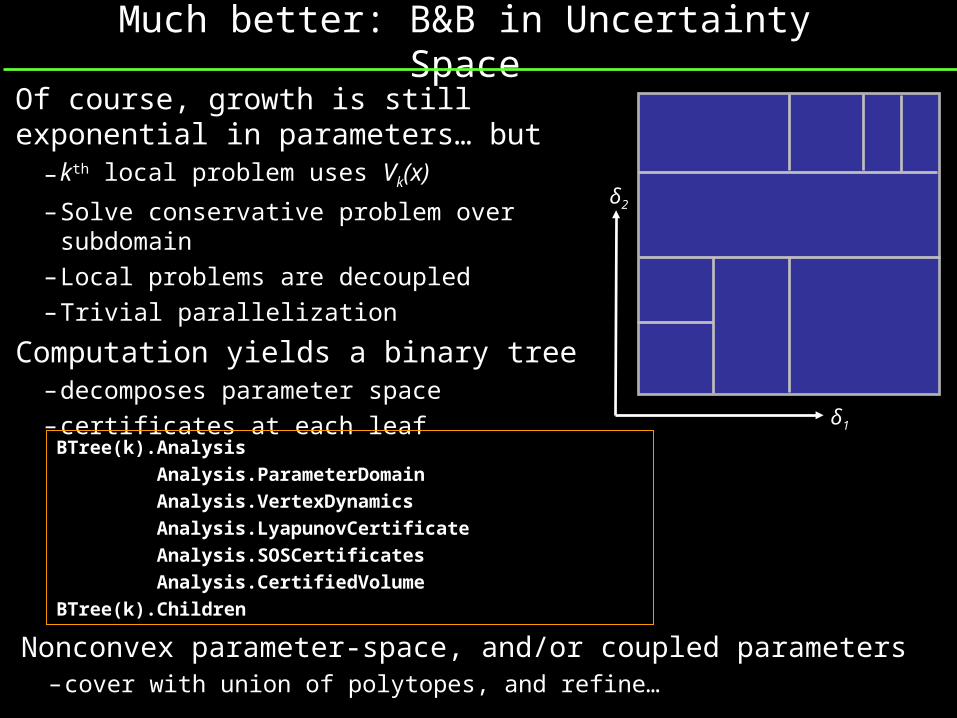
Much better: B&B in Uncertainty Space
Of course, growth is still exponential in parameters… but
–kth local problem uses Vk(x)
–Solve conservative problem over subdomain–Local problems are decoupled–Trivial parallelization
Computation yields a binary tree–decomposes parameter space–certificates at each leafBTree(k).Analysis
Analysis.ParameterDomain
Analysis.VertexDynamics
Analysis.LyapunovCertificate
Analysis.SOSCertificates
Analysis.CertifiedVolume
BTree(k).Children
δ1
δ2
Nonconvex parameter-space, and/or coupled parameters–cover with union of polytopes, and refine…
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
11 subdivisions
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
12 subdivisions
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
13 subdivisions
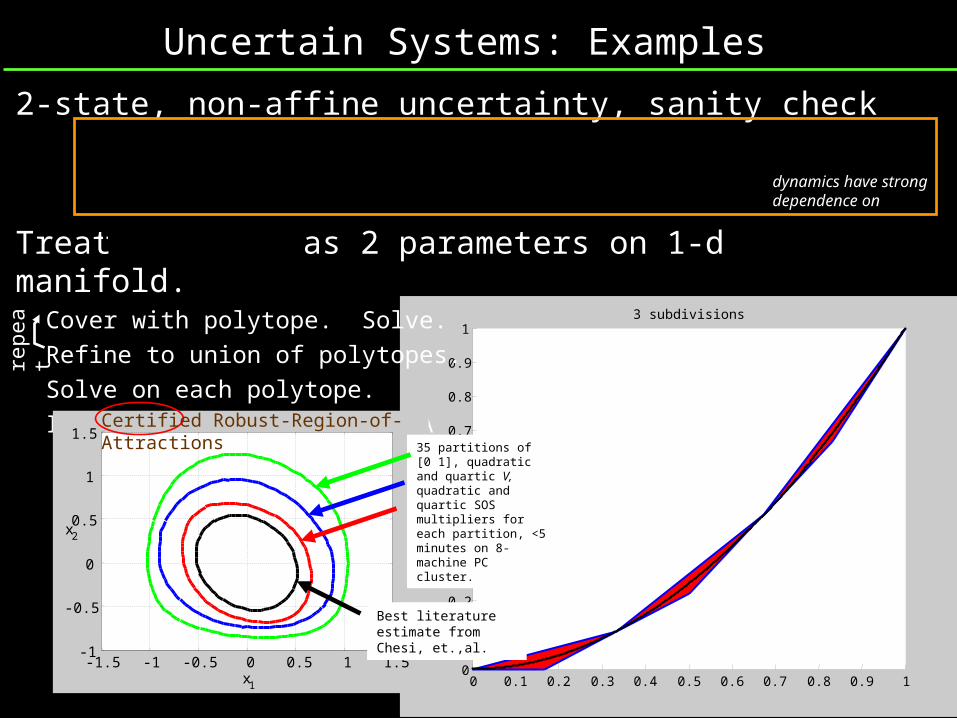
Uncertain Systems: Examples
2-state, non-affine uncertainty, sanity check
Treat as 2 parameters on 1-d manifold.Cover with polytope. Solve.
Refine to union of polytopes.
Solve on each polytope.
Intersect ROAs → Robust ROA
21
22121212
222
231
22211
41261023
46
xxxxxxxxx
xxxxxxx
x1
x2
-1.5 -1 -0.5 0 0.5 1 1.5-1
-0.5
0
0.5
1
1.535 partitions of [0 1], quadratic and quartic V, quadratic and quartic SOS multipliers for each partition, <5 minutes on 8-machine PC cluster.
Best literature estimate from Chesi, et.,al.
Certified Robust-Region-of-Attractions
10dynamics have strong dependence on
2,
repe
at
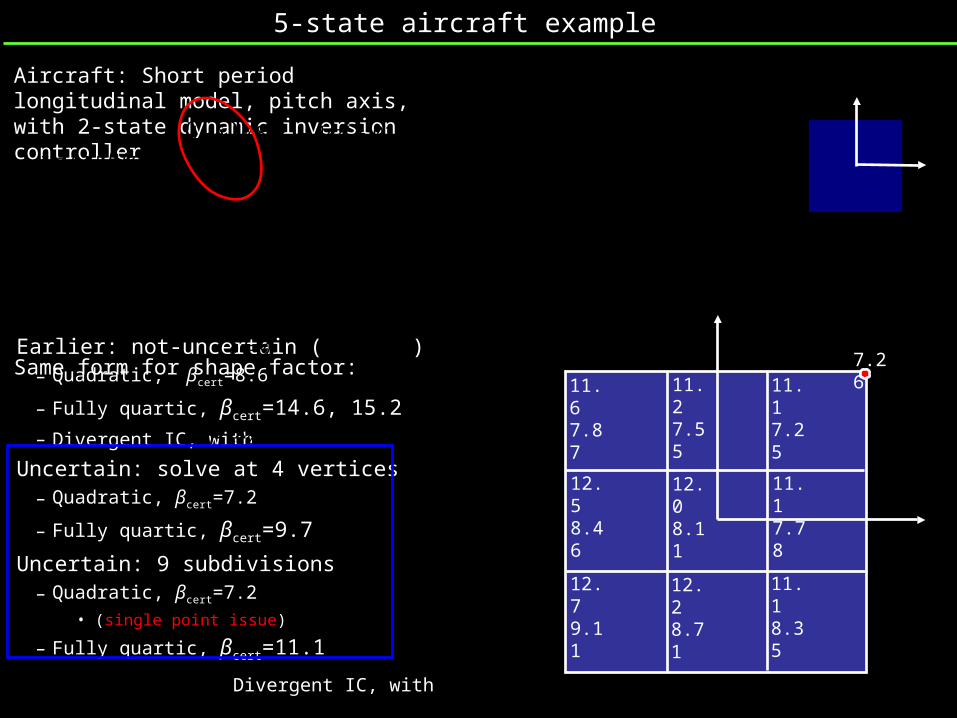
5-state aircraft example
Aircraft: Short period longitudinal model, pitch axis, with 2-state dynamic inversion controller
Same form for shape factor:
0
054.011.005.01
22.015.44.08.1
)( 2332
222
3232
22211
2 zzzz
zzzzzz
uzBAzz
before as)(,, 2zBAz
Earlier: not-uncertain ( )– Quadratic, βcert=8.6
– Fully quartic, βcert=14.6, 15.2
– Divergent IC, with
Uncertain: solve at 4 vertices– Quadratic, βcert=7.2
– Fully quartic, βcert=9.7
Uncertain: 9 subdivisions– Quadratic, βcert=7.2
• (single point issue)
– Fully quartic, βcert=11.1
TT zzxp :)(
3
1
28.75.
02.06.
00
09.6.z
z 21 2.2 u
9.16)( 0 xp
1
2
0
0.14)( 0 xp
11.17.25
12.79.11
12.28.71
12.58.46
11.67.87
11.18.35
12.08.11
11.27.55
11.17.78
7.26
Divergent IC, with
5-state aircraft example, time-delay
Aircraft: Short period longitudinal model, pitch axis, with 2-state dynamic inversion controller
Delay via 1st order Pade, use T = 0.25(linearized delay margin)Shape factor:
0
054.011.005.0
22.015.44.08.
)( 2332
22
3232
2221
2 zzzz
zzzzzz
uzBAzz before as)(,, 2zBAz
Earlier: no-delay– Quadratic, βcert=8.6
– Quartic, βcert=14.2
– Divergent IC, with
With delay:– Quadratic, βcert=5.0
– Quartic, βcert=9.0
– Divergent IC, with
delayTerm TT zzxp :)(
3
1
28.75.
02.06.
00
09.6.z
z 21 2.2 Tdelayu
9.16)( 0 xp
2.11)( 0 xp
Aside: checking SOS of degree=6 polynomial in 6 variables: 84-by-84 SDP, with 2600+ decision variables
10,)( 2, eqdd xx

5-state aircraft example, time-delay, uncertainty
Aircraft: Short period longitudinal model, pitch axis, with 2-state dynamic inversion controller
Set delay as 1st order Pade, 0.25 of linearized delay margin
Shape Factor
0
054.011.005.01
22.015.44.08.1
)( 2332
222
3232
22211
2 zzzz
zzzzzz
uzBAzz
before as)(,, 2zBAz
Nominal: βcert(∂V=2)=8.6, βcert(∂V=4)=14.2
– Divergent IC, with
Uncertain: βcert(∂V=2)=7.2, βcert(∂V=4)=11.1
– Divergent IC, with
Time-delay: βcert(∂V=2)=5.0, βcert(∂V=4)=9.0
– Divergent IC, with
Both (time delay, uncertainty) – Quadratic, βcert=4.25
– Quartic, βcert=8.3
– Divergent IC, with
3
1
28.75.
02.06.
00
09.6.z
z 21 2.2 Tdelayu
1
2
0.14)( 0 xp
delayTerm TT zzxp :)(
2.11)( 0 xp
8.594.25
8.785.21
9.004.93
9.174.95
9.744.69
8.274.67
8.394.70
8.384.45
8.314.47
earlier
7.10)( 0 xp
9.16)( 0 xp
Impact
Linear analysis provides a quick answer to a related, but different question:Q: How much gain and time-delay variation can we accommodate in flight?
A: Here’s a scatter plot of gain margin/time-delay margin at 1000 trim conditions (throughout envelope)
Why does linear analysis have impact in nonlinear problems?–Domain-specific expertise exists to interpret linear analysis & assess relevance
–Speed, scalable• Fast, defensible answers, on high-dimensional systems
Will (these) nonlinear methods ever have such an impact?–Problems where domain knowledge is less well-developed; little/no experience to rely on linear analysis: intuition could break down.
• UAVs with unusual airframe designs• Control laws for high-angle-of-attack maneuvers• Adaptive control laws
–Problems where performance is being pushed to the limit • approximations associated with linear analysis are no longer good enough.
Future Plans induced norms
– Exploiting simulation, along with parametric uncertainty– Incorporating constraint on the disturbance (ACC 06 paper)
Uncertainty modeling and approximation– We presented one class of uncertainty models for which vertex calculations
and Divide & Conquer methods are well suited– Other forms of uncertain models are useful too (CDC 07 paper)
Covering manifolds with polytopes– The affine parameter uncertainty model is limiting, often nonlinear functions of
parameters enter• in 2-state example, the (δ2) term is treated as an additional parameter,• cover low dimensional manifold with polytopes
Develop guidelines for sampling (InitCond & simulations)– Simulation-based approach to generate Lyapunov candidates has been
successful, but…• we have no guidelines on number of simulations and/or number of sample points
to draw from simulation• even theorems for a canonical example would be useful.
Leading to… tools that work on– 12 states, 5+ parameters, cubic (in x) vector field, analyze with ∂(V)=2– 6 states, 3+ parameters, cubic (in x) vector field, analyze with ∂(V)=4
LL2
L 2L
TransitionsRelease it
–SeDuMi (Sturm, McMaster)–SOStools (Anotonis, Prajna, Parrilo, Seiler)–Code (Topcu, Seiler) –PolynomialDynamicalSystem class (Wheeler, Seiler)
Teach it–1-unit course at UCBerkeley, UMinn in Spring 08
• Extend approach, apply to 2 or 3 state system, document, post, submit
• Apply to 6-state, uncertain system, document, post
–Course material online
Promote it–Website/Wiki for nonlinear analysis problems–Conferences, journals, ½ day workshops–Topcu did internship at Honeywell (summer 2007)
Use it–Me, Balas, Seiler, … and …
Final assignment
Publications1. “Stability region analysis using SOS programming,” 2006 ACC
2. “Local gain analysis of nonlinear systems,” 2006 ACC
3. “Stability region analysis using simulations and SOS programming,” 2007 ACC
4. “Stability region analysis via composite Lyapunov functions & SOS programming,” IEEE TAC, 10/07.
5. “Local stability analysis using simulations & SOS programming,” under review, Automatica (12/06, 4/07)
6. “Stability region analysis for uncertain nonlinear systems,” to appear 2007 CDC
7. “Local stability analysis for uncertain nonlinear systems,” submitted IEEE TAC (6/07)
8. “B&B for Local Stability analysis of uncertain nonlinear systems,” in preparation, 2008 ACC, ASME Journal of Dynamical Systems, Measurement and Control.
Project Website
http://jagger.me.berkeley.edu/~pack/certify
All examples, certificates, …
http://jagger.me.berkeley.edu/~pack/certificates

1-unit course: Lecture Schedule1. Intro: polynomial dynamical systems
2. Lyapunov theorem for ROA
3. ROA: simulations constrain V
4. Review, recap LP, SDP optimization problems
5. SOS→PSD, checking SOS ↔ SDP
6. Containments, empty intersections, as SOS, general Psatz
7. Applying 1-6 to ROA problems
8. Code, tools, results for 7
9. Disturbance-to-state problems
10.Uncertain Dynamics, vertex results, Branch and Bound
11.Covering nonpolynomial systems with poly model, error
12.Global & local Control Lyapunov Function (CLF) synthesis
13.Other literature, approaches (Lall, Glavski, Prajna, etc)
14.Other literature (continued)