didier el baz, vincent boyer laas-cnrs, toulouse …eugen.dedu.free.fr/publi/dmems10slides.pdfdidier...
TRANSCRIPT
Didier El Baz, Vincent BoyerLAAS-CNRS, Toulouse
Julien Bourgeois, Eugen Dedu, KahinaBoutoustous
LIFC, Montbéliard
Project ANR-06-ROBO-0009 Smart Surface
dMEMS 2010 1
1. Introduction
2. The Smart Surface
3. Distributed discrete state acquisition
4. Concurrent part differentiation
5. Smart surface simulator
6. Tests
7. Conclusions
8. Perspective
dMEMS 2010 2
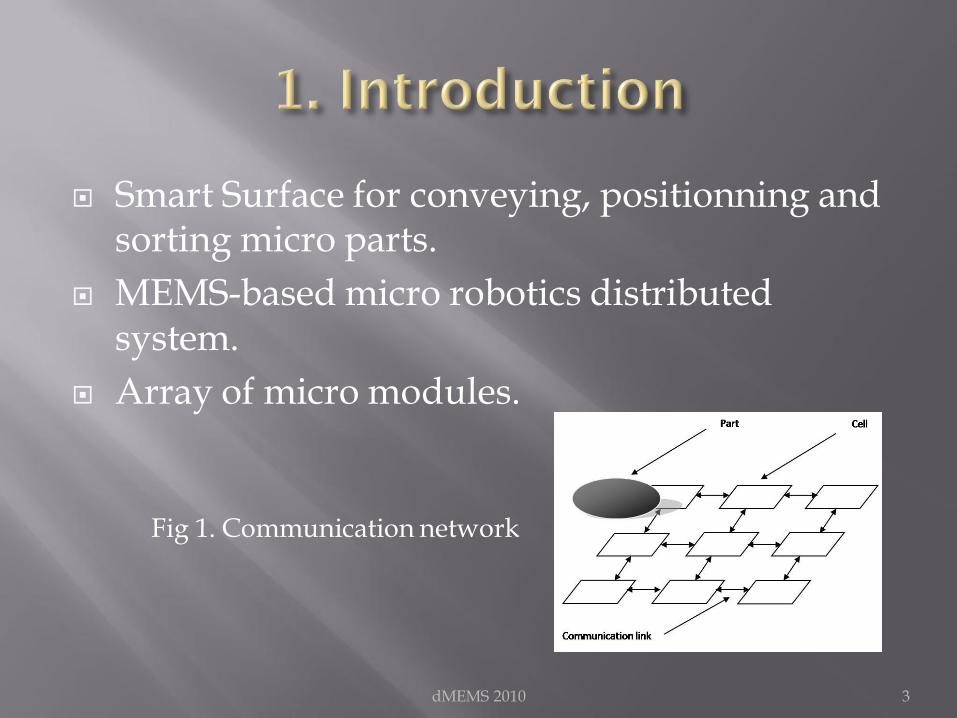
Smart Surface for conveying, positionning and sorting micro parts.
MEMS-based micro robotics distributedsystem.
Array of micro modules.
Fig 1. Communication network
dMEMS 2010 3
Rich problematic
Scarcity of resources:
- sensors;
- memory occupancy;
- computing power.
Faults.
dMEMS 2010 4

Small parts that cover a small number of cells.
Air nozzles actuators.
Goals:
- MEMS with sensors & « intelligence »,
- fully integrated solution
dMEMS 2010 5
ACTUATOR
SE
NS
OR
ACTUATOR
SE
NS
OR
ACTUATOR
SE
NS
OR
ACTUATOR
SE
NS
OR
ACTUATOR
SE
NS
OR
Distributed control module
Distributed recognition
module
PART
Po
sitio
n a
nd
rew
ard
P2P Communication
Distributed control module
Distributed control module
Distributed control module
Distributed control module
distributed communication management
Distributed recognition
module
Distributed recognition
module
Distributed recognition
module
Distributed recognition
module In
form
atio
ns
ab
ou
t th
e p
art
Po
sitio
n a
nd
rew
ard
P2P Communication
distributed communication management
Info
rmatio
ns
ab
ou
t th
e p
art
Po
sitio
n a
nd
rew
ard
P2P Communication
distributed communication management
Info
rmatio
ns
ab
ou
t th
e p
art
Po
sitio
n a
nd
rew
ard
P2P Communication
distributed communication management
Info
rmatio
ns
ab
ou
t th
e p
art
Po
sitio
n a
nd
rew
ard
distributed communication management
Info
rmatio
ns
ab
ou
t th
e p
art
Fig 2. SS

Each cell has to obtain global knowledge of the state of the smart surface:
it must know precisely if there is a part on the smart surface and obtain its representation.
Initially a cell detects only if there is a part on itor not (0-1 information).
dMEMS 2010 6
Fig 3. Distributed state acquisition
Mathematical model
Assumption:
- only one sensor per cell
Notations:
- n denotes the number of cells.
Augmented local state of the i-th cell:
dMEMS 2010 7
.,...,1,1,0 nixn
i
Augmented global state:
Fixed point problem:
find smallest which satisfies:
dMEMS 2010 8
.1,02n
Ex
.xFx
Ex *
dMEMS 2010 9
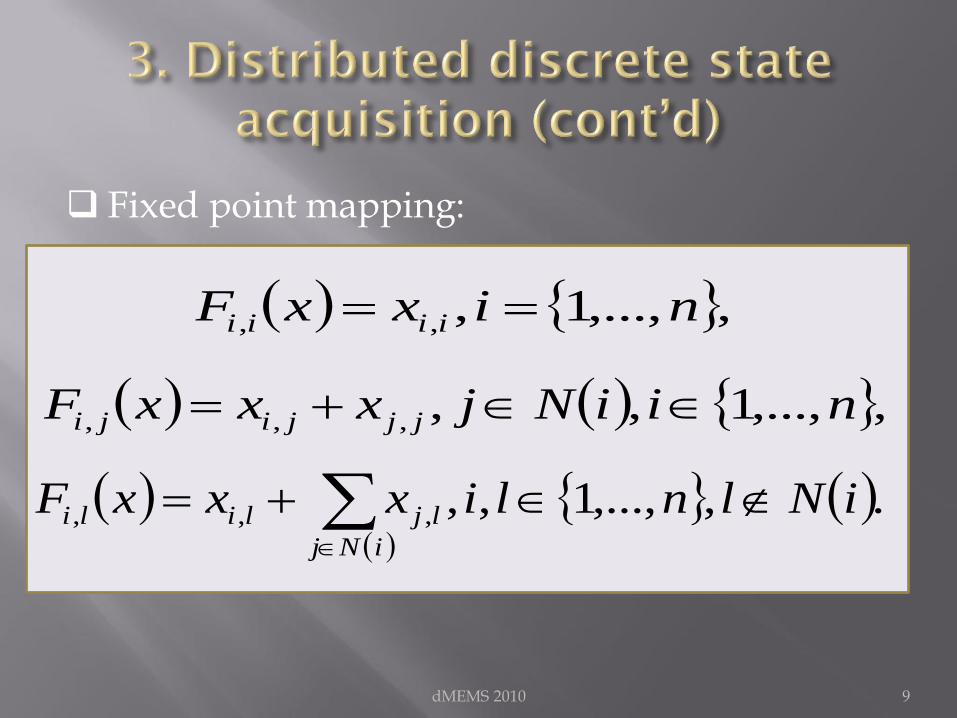
,,...,1,,, nixxF iiii
,,...,1,,,,, niiNjxxxF jjjiji
iNj
ljlili iNlnlixxxF .,,...,1,,,,,
Fixed point mapping:
,10
, iix
,00
, iix
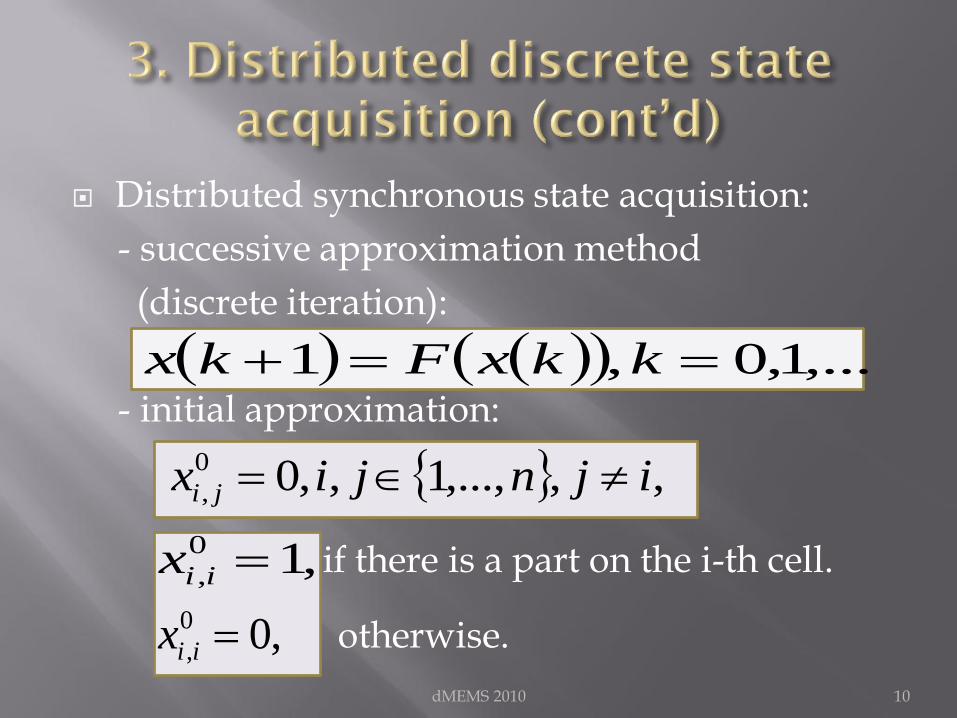
Distributed synchronous state acquisition:
- successive approximation method
(discrete iteration):
- initial approximation:
dMEMS 2010 10
,...1,0,1 kkxFkx
,,,...,1,,00
, ijnjix ji
otherwise.
if there is a part on the i-th cell.
Clearly, is not the only fixed point of .
Importance of choosing a good initial approximation in order to converge to a solution that makes sense.
The approximation is a sub-solution.
The mapping is monotone.
The discrete iteration converges to .
The number of iterations is bounded by the largest Manhattan distance + 1.
dMEMS 2010 11
*x F
0x
F
kx *x
Distributed asynchronous algorithms:
we assume that there is a set of times at whichone or more sub-vectors are updated,
The sets are infinite.
dMEMS 2010 12
,,,..., ,,1
1
1 iTkxxFxks
n
ks
i
k
iini
.,1 iTkxx k
i
k
i
Tix
.,,...,1,,0 , iTknjikks ij
,lim , ks ijk
iT

The asynchronous iteration converges to from
Robustness, efficiency.
Implementation on Smart Surface Simulator (SSS).
dMEMS 2010 13
kx*x
0x
Parts may occupy any position.
Parts may have any orientation.
Cells compute concurrently severaldifferentiation criteria.
- region-based criteria
- contour-based criteria
Few references available in a resource scarcitycontext (Ishida et al., Tabbone et al. 2006, …)
dMEMS 2010 14
.,...,1,11
)(1
)(mj
qjg
q
ic
jr
i
i
A first gap-based method
- single reference position;
- subset of criteria
- comparison of criteria values:
part vs reference;
- fault tolerant;
- decision based on the smallest gap.
dMEMS 2010 15
.,...,1,11
min)('1
)(mj
qjg
q
ic
jr
Dd
i
di
A second gap-based method
- multiple reference positions.
dMEMS 2010 16
Multithreaded Java code designed for multicore machines.
Evaluation and validation of criteria, distributed algorithms, stopping criteria.
Study of communications.
dMEMS 2010 17
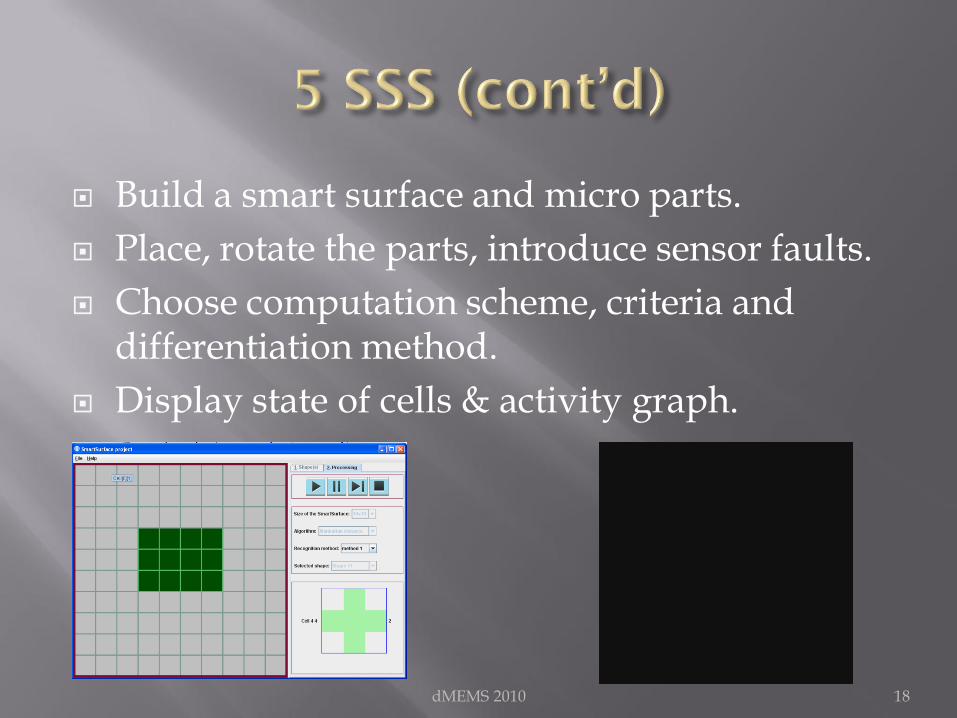
Build a smart surface and micro parts.
Place, rotate the parts, introduce sensor faults.
Choose computation scheme, criteria and differentiation method.
Display state of cells & activity graph.
dMEMS 2010 18
Multithreaded SSS carried out on Intel QuadroXeon 3.0 GHz.
Comparison of gap-based methods and total differentiation methods (Boutoustous et al. 2008).
Results for three parts: square, L and I shapes.
Randomly generated set of tests, 200 draws.
17 criteria considered, selection of criteria.
dMEMS 2010 19
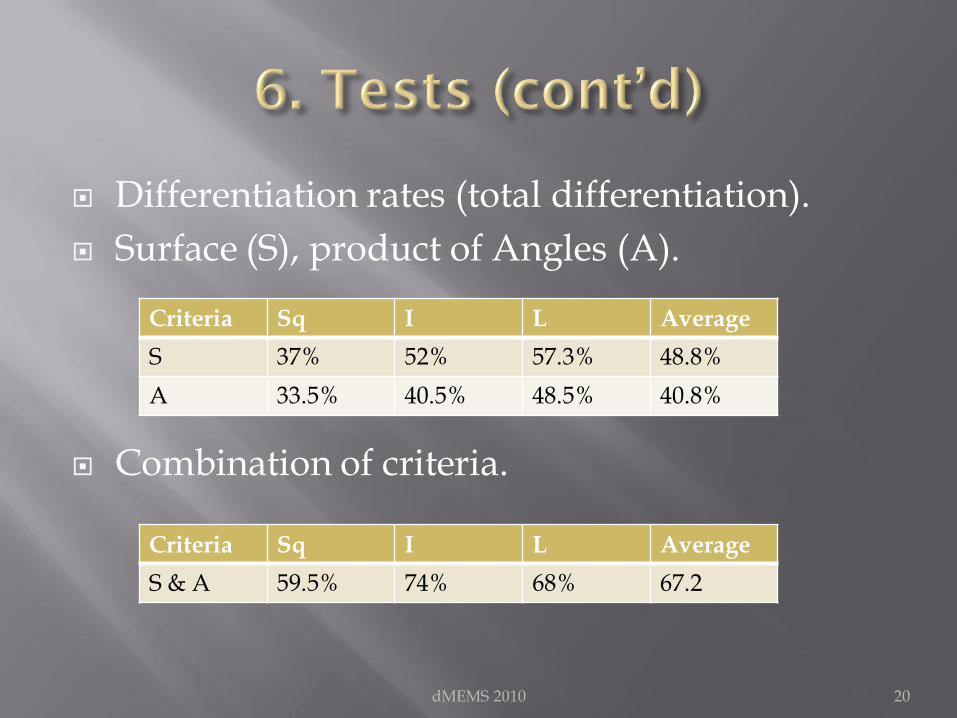
Differentiation rates (total differentiation).
Surface (S), product of Angles (A).
Combination of criteria.
dMEMS 2010 20
Criteria Sq I L Average
S 37% 52% 57.3% 48.8%
A 33.5% 40.5% 48.5% 40.8%
Criteria Sq I L Average
S & A 59.5% 74% 68% 67.2
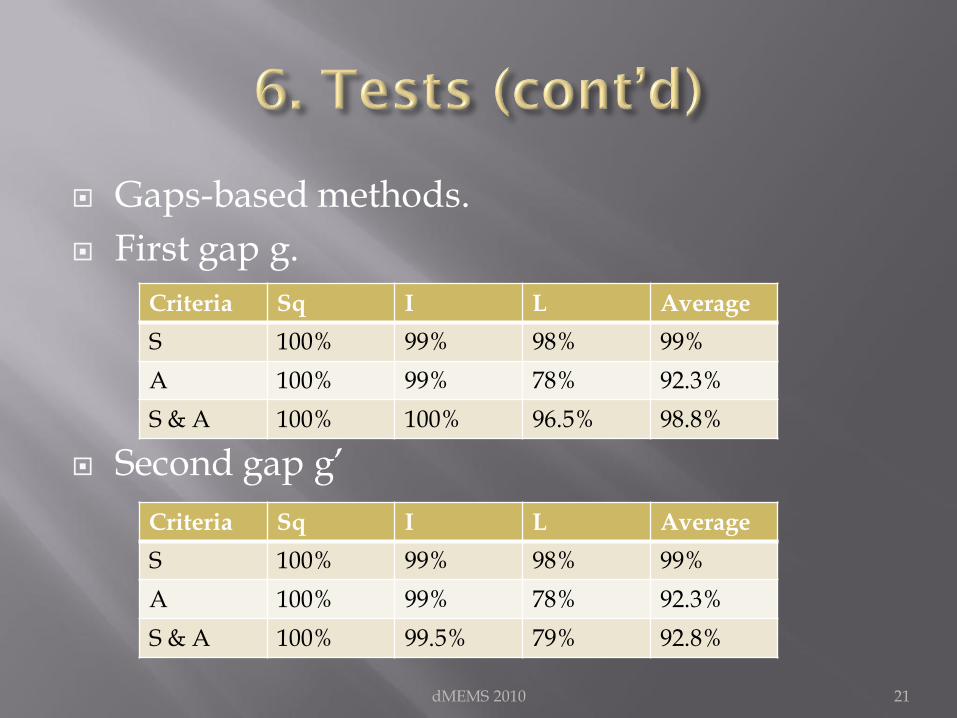
Gaps-based methods.
First gap g.
Second gap g’
dMEMS 2010 21
Criteria Sq I L Average
S 100% 99% 98% 99%
A 100% 99% 78% 92.3%
S & A 100% 100% 96.5% 98.8%
Criteria Sq I L Average
S 100% 99% 98% 99%
A 100% 99% 78% 92.3%
S & A 100% 99.5% 79% 92.8%
Mathematical foundations of smart surface state acquisition.
Distributed algorithms & stopping criteria.
Convergence results.
Differentiation based on gaps.
Multithreaded Java Smart Surface Simulator.
dMEMS 2010 22
Implementation of the gap-baseddifferentiation method on the Smart Surface testbed in Femto.
Combined part differentiation and control.
Differentiation methods not based on criteria
e.g.: Radon transform.
Exploit natural parallelism of the cell array.
Fault tolerance.
dMEMS 2010 23

dMEMS 2010 24