discussion paper regulatory options for automated...
TRANSCRIPT

Discussion paper
Discussion PaperMay 2016
Regulatory options for
automated vehicles

2Regulatory options for automated vehicles
Report outline Title Regulatory options for automated vehicles
Type of report Discussion paper
Purpose For stakeholder consultation
Abstract The purpose of this paper is to seek stakeholder feedback on options to address regulatory barriers to increased vehicle automation. The discussion paper:
• identifies key issues based on a comprehensive legal auditof Commonwealth, state and territory legislation
• summarises stakeholder feedback to the NTC issuespaper, Regulatory barriers to more automated road and railvehicles (NTC, 2016); and
• discusses potential options to address the identifiedissues.
Submission details
Key words
Contact
ISBN
Submissions will be accepted until Monday 4 July 2016 online at www.ntc.gov.au or by mail to:
Att: Automated Vehicle Team National Transport CommissionLevel 15/628 Bourke StreetMelbourne VIC 3000
automated vehicle, regulation, Australian Design Rules, vehicle standards, Australian Road Rules, liability, privacy, security
National Transport CommissionLevel 15/628 Bourke StreetMelbourne VIC 3000Australia
Ph: +61 (03) 9236 5000 Email: [email protected]: www.ntc.gov.au
978-1-921604-94-2
Cover image: iStock.com/VanderWolf-Images

3Discussion paper
ContentsExecutive Summary 6
Who we are 6
Why reform is needed 7
Regulatory barriers to commercial deployment 8
Regulatory options for automated vehicles 13
How to make a submission 19
Chapter 1: Context 20
Objectives 20
Benefits of automated vehicles 20
What is the problem? 21
Key terms used in this paper 23
Assumptions adopted in this paper 23
Strategic context 24
Project method and timeframes 24
Scope 25
Chapter 2: Consultation 28
Consultation questions 28
When to submit 29
How to submit 29
Chapter 3: Classifying automated driving functions 30
Introduction 30
The SAE International Standard J3016 30
Issues with classifying automated vehicles 33
Feedback from the issues paper 34
Proposed approach 37
Conclusion 38
Chapter 4:Supporting on-road trials 39
Introduction 39
Issues 39
Feedback from the issues paper 40
Options 40
Conclusion 44

4Regulatory options for automated vehicles
Chapter 5: The changing meaning of control and proper control 45
Introduction 45
Issues 47
Feedback from the issues paper 50
Options 51
Conclusion 53
Chapter 6: Safety assurance for vehicles that do not require a human driver 54
Introduction 54
Issues 56
Feedback from the issues paper 58
Options 59
Conclusion 63
Chapter 7: The changing meaning of driver and driving 64
Introduction 64
Issues 65
Feedback from the issues paper 68
Options 68
Conclusion 73
Chapter 8: Identifying responsibility for a vehicle at a point in time 74
Introduction 74
Issues 75
Feedback from the issues paper 77
Options 78
Conclusion 80
Chapter 9: Vehicle design and standards 81
Introduction 81
Issues 82
Feedback from the issues paper 86
Options 87
Conclusion 88
Chapter 10: Vehicle modification and in-service compliance 89
Introduction 89

5Discussion paper
Issues 89
Feedback from the issues paper 91
Options 92
Conclusion 94
Chapter 11: Liability 95
Introduction 95
Issues 96
1. Liability is well-established but assigning fault could be more complex 96
Feedback from the issues paper 98
2. Access to data is a critical issue for some insurers 99
Feedback from the issues paper 100
3. Limitations on road manager liability may be a barrier 100
Feedback from the issues paper 101
4. Compulsory third-party insurance schemes could change 102
Feedback from the issues paper 102
Options 103
Conclusion 106
Chapter 12: Privacy 107
Introduction 107
Issues 108
Feedback from the issues paper 111
Options 112
Conclusion 115
Chapter 13: Timing of reforms 116
Near-term reforms 117
Medium-term reform 117
Longer-term reform 118
Clarify then refine 119
Glossary 120
Submissions to the NTC issues paper (2016) 123
References 125

6Regulatory options for automated vehicles
Executive Summary Automated vehicles offer the possibility of fundamentally changing the transport task and society. It is likely this technology can improve road safety, mobility, productivity and environmental outcomes. However, to unlock these benefits, governments need to remove unnecessary legal barriers, support on-road trials and provide for the safe operation of automated vehicles.
The project aims to:
• understand how current regulations can support increased vehicle automation;
• identify legal barriers to automated vehicles; and
• support a nationally consistent regulatory framework for automated vehicles.
This paper:
• identifies key barriers to automated vehicles based on a comprehensive audit of relevant Commonwealth, state and territory legislation (the annex to this paper contains this audit)
• discusses options to address these key barriers
• summarises stakeholder feedback to the National Transport Commission (NTC) issues paper: Regulatory barriers to more automated road and rail vehicles (NTC, 2016).
In assessing how current regulations can support increased vehicle automation, we have considered three levels of technology use:
1. On-road trials and demonstrations.
2. Automated driving that requires a human driver.
3. Automated driving that does not require a human driver.
After the consultation period for this paper, we will prepare reform recommendations for Australia’s transport ministers about how to regulate automated vehicles. We intend to submit these to the Transport and Infrastructure Council meeting in November 2016. The reform recommendations will focus on addressing immediate regulatory barriers, and point to decisions that may need to be made by ministers in the future.
Following this meeting we will publish a final policy paper presenting the Council’s decisions on our recommendations.
Your views on the regulatory options for automated vehicles will be crucial in allowing us to make the best, most-informed recommendations, and we strongly encourage you to make a submission. Submissions will be accepted until Monday 4 July 2016.
We are seeking feedback on the issues, proposed approaches and the timing of reforms.
Who we areThe NTC is an inter-governmental agency charged with improving the productivity, safety and environmental performance of Australia’s road, rail and intermodal transport systems. As an independent statutory body, the NTC develops and submits reform recommendations for approval to the Transport and Infrastructure Council, which comprises Commonwealth, state and territory transport, infrastructure and planning ministers.

7Discussion paper
Automated vehicles are an important part of our work program because they are expected to have a significant impact on transport networks. Our work in this area began in 2015 after the Transport and Infrastructure Council asked us to identify regulatory barriers to safely introducing more automated road and rail vehicles in Australia.
Why reform is neededVehicle manufacturers are progressively introducing increased levels of automated driving controls in their vehicles. Automated vehicles could significantly improve road safety outcomes by preventing crashes and reducing deaths and serious injuries, yet the technology cannot be fully used unless our current regulations are reformed. Lack of certainty relating to who or what is in control of an automated vehicle, and the concept of the driver in legislation, are the key regulatory barriers to more highly automated vehicles.
Australian governments already regulate the design and use of road vehicles. While our regulations may need to be adapted to support the safe operation of automated vehicles, including the removal of unnecessary barriers, policy-makers also need to consider the uncertain safety outcomes associated with different applications of automated driving. Automated vehicles will operate in a mixed environment, containing a variety of automated vehicle types and conventional vehicles.
The Australian Government has responsibility for design rules for new vehicles, but state and territory governments have jurisdiction over in-service vehicle standards, road rules, enforcement, registration and licensing. There is a risk that this complex regulatory framework will result in inconsistent regulation of automated vehicles across states and territories. There is also a risk that regulations will be inconsistent with relevant international standards and conventions. This would constitute a significant barrier to the introduction of automated vehicles in what is primarily an import-based market.
Different levels of vehicle automation
There are different levels of vehicle automation. The policy issues and regulatory barriers discussed in this paper depend on the level of vehicle automation. These are:
1. Partially automated means that the automated driving system may take control of steering, acceleration and braking in defined circumstances, but the human driver must continue to monitor the driving environment and the driving task, and intervene if requested.
2. Conditionally automated means that the system drives the vehicle for sustained periods of time. The human driver doesn’t have to monitor the driving environment, but must continue to monitor the automated driving system, intervene if requested and be the fallback for the dynamic driving task.
3. Highly automated means that the system drives the vehicle for sustained periods of time in some situations, or all of the time in defined places, and the human driver does not have to monitor the driving environment and the driving task, or intervene if something goes wrong.
4. Fully automated means that all aspects of the driving task and monitoring of the driving environment and the dynamic driving task are to be undertaken by the vehicle system. The vehicle can operate on all roads at all times.
Each chapter in this paper specifies whether the issues addressed are near, medium or long term, or could be adapted over time, and the relevant level of automated driving (based on SAE International Standard J3016 Levels of Automated Driving – see Chapter 3).

8Regulatory options for automated vehicles
Automated trains
The NTC was also tasked with identifying any regulatory barriers associated with more automated trains. We found that there are unlikely to be regulatory barriers to the introduction of more automated trains in Australia because the rail sector has adopted an accreditation model based on operators satisfying the relevant regulator that they have the competency and capacity to manage the identified risks. This approach was supported in the stakeholder feedback to the issues paper Regulatory barriers to more automated road and rail vehicles (NTC, 2016).
For these reasons, the NTC proposes that no further analysis of automated rail is required at this time.
Regulatory barriers to commercial deployment The NTC has identified a number of regulatory barriers to more highly automated vehicles. Because the introduction of automated vehicles is subject to the development of technology and adoption by the market, we cannot know the order in which different applications of automated driving will be commercialised. Therefore we cannot be certain at this point just which regulatory barriers should be removed as a priority, and which should be deferred until there is greater market certainty and technology maturity.
Nonetheless, based on stakeholder feedback to the issues paper and an analysis of market trends, it is reasonable to forecast that reforms can address the regulatory barriers in a staged approach based on what is:
1. likely to be seen in the near term – commence work on reforms as soon as possible
2. likely to be seen in the medium term – commence work on reforms within two years
3. likely to be seen in the longer term – commence work on reforms within three to five years
4. those issues that could benefit from clarification now, but could also be adapted over time as the technology and market matures.
Chapter 13 sets out the rationale for the timing and sequencing of proposed reforms. Many of the regulatory barriers can be managed through existing exemption processes until there is large-scale commercial deployment of highly automated vehicles. The issues that should be prioritised in the near-term relate to supporting on-road trials and clarifying the meaning of control and proper control, because the market is preparing to undertake trials from 2016 and possibly deploy vehicles with conditional automation by 2020.
Figure A presents the key issues discussed in this paper, proposed approaches and the potential timing of reforms.

9Discussion paper
Commence as soon as possible
Issue or barrier Proposed approach
Potentially inconsistent conditions for on-road trials in states and territories
Governments introduce national guidelines to support a consistent approach to state-based exemptions for on-road trials.
Lack of clarity as to who or what is in control of a vehicle that is conditionally automated Governments develop national enforcement guidelines
that clarify the meaning of control and proper control.Lack of clarity as to what proper control means for conditionally and highly automated vehicles
Outcomes: Australia supports on-road trials for any level of automation. Australia supports the commercial deployment of conditional and highly automated vehicles on public roads.
Commence reforms within 2 years
Issue or barrier Proposed approach
Regulatory mechanisms ensure automated vehicles are operated safely by an automated vehicle system entity
Governments implement a safety assurance framework to oversee the deployment of automated vehicles in conjunction with removing legal barriers.
The definition of driver in many laws requires a human driver
Governments expand the meaning of driver in relevant legislation to include an automated driving system; and to ensure that a legal entity is responsible for the automated driving system.
Some obligations of the human driver could not be met by an automated vehicle
It is difficult to identify who is responsible for a highly automated vehicle when control can alternate between the human driver and automated driving system
Enforcement agencies continue current approach – in the event of an offence, agencies take action against the human driver or registered owner. Governments further investigate options as the technology and market develops.
Outcome: Australia supports the commercial deployment of highly and fully automated vehicles.
Commence reforms within 3 to 5 years
Issue or barrier Proposed approach
Current vehicle standards assume a human driver Adopt new ADRs for automated vehicles in step with the development of international standards.
Outcome: Australia continues to maintain international consistency in vehicle standards and supports non-traditional vehicle designs through exemptions whilst standards develop.
Commence as required
Issue or barrier Proposed approach
Vehicle modifications in highly and fully automated vehicles could be a higher risk
Governments support industry development of modification standards that address automated vehicle issues.
Lack of clarity as to who is liable for a crash Continue current approach – rely on existing liability regimes to resolve liability issues on a case-by-case basis, plus governments support the development of industry guidance.
Potential or perceived threat to privacy Continue current approach – regulate privacy protection through Commonwealth and state-based privacy principles.
Outcome: Australia maintains consistent approaches to privacy, liability and safety, whilst monitoring for new risks.
NEAR-TERM REFORM
MEDIUM-TERM REFORM
LONGER-TERM REFORM
CLARIFY THEN REFINE
Figure A: Regulatory issues with automated vehicles – timeframes, issues and proposed approach

10Regulatory options for automated vehicles
Priority barriers to address in the near term
• potentially inconsistent rules for on-road trials in states and territories: successfully testing automated vehicles on public roads will ensure they can operate safely on the network alongside other vehicle types and road users, including vulnerable road users. States and territories have road traffic exemption powers to allow on-road trials. They can also close roads to public access. Enabling legislation has been passed in South Australia. Other jurisdictions have determined that they can support on-road trials under current legislative instruments.
At issue is the extent to which regulatory requirements for trials, including insurance, and access to data and driver training, will be consistent across jurisdictions. There is a risk that in Australia a patchwork of trial conditions and processes will deter industry investment in automated vehicle trials, increasing trial costs and making Australia less competitive and innovative compared to other countries contending for automated technology investment.
> see Chapter 4.
• lack of clarity as to who or what is in control of a vehicle that is conditionally automated: vehicles that are conditionally automated will perform driving tasks, but still require the human driver to monitor the automated driving system and to be the fallback for the dynamic driving task. The human driver won’t have to monitor the driving environment. Does the driver in this situation have control of and legal responsibility for the vehicle? Resolving this issue will clarify responsibility for compliance with road rules and enforcement, and help resolve liability issues. This will help provide certainty for industry, governments, consumers and the community.
> see Chapter 5.
• lack of clarity as to what proper control means for conditionally and highly automated vehicles: the road rules require the driver to have proper control of the vehicle. Enforcement agencies currently interpret proper control of a vehicle travelling at speed on a public road to mean that the human driver has at least one hand on the steering wheel. This is likely to become outdated in the context of the changing nature of how control is defined. At issue is how governments can ensure that the intent of the proper control rule is maintained if different automated vehicles have various requirements for human drivers.
> see Chapter 5.
Priority barriers to address in the medium term
• there are no regulatory mechanisms to ensure automated vehicles are operated safely by an automated vehicle system entity: like other vehicles, automated vehicles will be subject to vehicle standards and road rules. However, driver licencing requirements will not apply to automated vehicles that do not have a human driver. If the legal barriers are removed, governments may seek regulatory oversight of automated vehicles to ensure they operate safely on the road network.
> see Chapter 6.
• the definition of driver in many laws requires a human driver: in many laws, the current definition of driver means a human driver, yet in more advanced automated vehicles, there will not be a human driver some of the time or all of the time. Without a human driver, these vehicles could not currently be deployed without the relevant exemptions from the road rules and other laws. If no action is taken, advanced automated vehicles could not operate in Australia.
> see Chapter 7.

11Discussion paper
• some obligations of the driver could not be met by an automated vehicle: some laws may simply not be relevant for highly and fully automated vehicles that do not have a human driver, such as drink driving and fatigue laws. The intent of other laws will continue to be relevant, but could be amended to take into consideration automated vehicles and to ensure that those legal obligations are transferred to other relevant parties (such as a vehicle operator or occupant). This could include obligations of the driver to assist in the event of an accident causing death or serious injury; to provide vehicle documentation relating to vehicle mass or dimensions, or the requirement to obey an instruction of an authorised officer.
If these laws are not amended to take automated vehicles into consideration, it is uncertain that current driver requirements would apply to highly or fully automated vehicles, or how automated vehicles could comply with these laws.
> see Chapter 7.
• it could be difficult to identify who is responsible for a highly automated vehicle when control can alternate between the human driver and automated driving system: some automated vehicles are likely to be controlled by the automated driving system only some of the time, for example a vehicle that only operates in “highly automated” mode on motorways. This is likely to create operational challenges for enforcement agencies interacting with automated vehicles. There is currently uncertainty about what data agencies will be able to access to assess whether a vehicle’s automation function was operating, and whether such data can and should be made available to other entities, such as insurers.
> see Chapter 8.
Priority barriers to address in the longer term
• current vehicle standards assume a human driver: the highest levels of driving automation will have no requirements for human driving, monitoring or intervention. These vehicles are “self-driving” and will carry only passengers or freight or run empty. These automated vehicles potentially have the highest societal benefits, particularly in terms of economic productivity (no human drivers) and mobility (they could be used by unlicensed passengers). They are also unlikely to need human driver-related features that are currently required by law in the Australian Design Rules (ADRs) and in-service vehicle standards, including requirements for steering wheels, control panels, mirrors and brake pedals.
To continue to require manufacturers to include these features when they are not required to operate the vehicle safely would be an unnecessary cost and barrier to the introduction of highly and fully automated vehicles. If new vehicle standards were not introduced in due course, these vehicles could not operate in Australia without an exemption.
There are also key components of automated vehicles that are not currently included in ADRs, such as security, data management and communications protocols. ADRs provide a mechanism to ensure that these components are adequately considered in a standardised way, but the Australian Government and manufacturers also seek to ensure that Australia is aligned with UN Regulations and that we do not introduce new requirements before there is certainty at the international level.
> see Chapter 9.

12Regulatory options for automated vehicles
Issues that could benefit from clarification now, but could be adapted over time
• vehicle modifications in highly and fully automated vehicles could be a higher risk: automated vehicles will increasingly rely on sensor technology and software to operate safely. In highly and fully automated vehicles there will not necessarily be a human driver or occupant to intervene if the technology fails. There is therefore a greater risk that vehicle modifications, including over-the-air software updates, non-commercial (“back yard”) modifications and after-market fitments, could significantly undermine the integrity of vehicle operating systems. Yet governments today rely primarily on self-regulation and roadside enforcement to ensure compliance with in-service vehicle standards. At issue is whether this level of oversight will continue to be sufficient in the future, or whether increased regulatory oversight of vehicle modifications is necessary to manage the higher risk
> see Chapter 10.
• lack of clarity as to who is liable for a crash: liability is well established in law, but assigning fault could be more complex. If complexity increases, liability risks could prevent the rollout of automated vehicles or severely reduce their functionality or scope of operations, if manufacturers become highly cautious. Liability issues include who should have prima facie responsibility for highly and fully automated vehicles, whether insurer access to data should be regulated, current limitations on road manager liability and whether people involved in crashes with automated vehicles would be eligible for compulsory third-party insurance compensation.
> see Chapter 11.
• potential or perceived threat to privacy: public perceptions about automated vehicles will be impacted by how the personal information of consumers is handled and whether there are clearly defined privacy protections. To protect consumers and provide market certainty, government access to automated vehicle data may warrant additional legislative privacy protections.
> see Chapter 12.

13Discussion paper
Regulatory options for automated vehicles The role of government is a key issue in the deployment of automated vehicles. Should the evidence indicate that automated vehicles offer safety, mobility, productivity or environmental net benefits, a case exists that governments should at a minimum ensure that existing laws are not a barrier to their introduction.
A number of existing laws in Australia, including road rules and vehicle standards, are barriers to more automated vehicles, and this discussion paper addresses these barriers. However, the immediate removal of current legal barriers – without additional regulatory oversight – would enable any automated vehicles to operate without road transport agencies being satisfied that these vehicles can operate safely against any risk assessment or criteria.
Like other road vehicles today, more highly automated vehicles can be regulated by ADRs, in-service vehicle standards, registration and road rules. Also, industry is incentivised to provide safe products through consumer law and product liability. At issue is whether automated vehicles need additional government oversight, or whether the safe operation of automated vehicles can be managed by the private sector within the current framework.
Figure B illustrates this choice in broad terms – it shows groups of issues or barriers that need to be addressed, and a variety of ways in which they could be addressed. The thinner wedges – starting with industry self-regulation – indicate areas of lesser government oversight, whereas the thickest wedge represents the most government oversight – the implementation of a safety assurance framework that allows governments to oversee the deployment of automated vehicles, for example through regulatory mechanisms such as an automated vehicle registration process or licensing.
An important consideration is the extent to which the general community, reflected in the decision-making of governments, accepts risks associated with automated vehicles. If the community’s risk appetite is low and it thus expects automated vehicles to be low-risk, the case for regulatory oversight is strong. If the community is willing to accept a higher risk to attain overall benefits, the case for regulatory oversight is weak. Other factors include market failures, such as incentives to breach, or a systemic compliance problem.

14Regulatory options for automated vehicles
Figure A: Regulatory options for automated vehicles - potential types of government oversight of the market entry and safety performance of automated vehicles
Risk appetite of the general community
Who is liable if something goes wrong?
Who is responsible for
vehicle repair and modification?
What does “driver” mean?
How is individual privacy
protected?
What does “control” of a vehicle mean?
How do agencies identify
who is responsible for the vehicle?
How are driver
obligations met?
How can on-road trials be supported?
Issues
Figure B: Regulatory options for automated vehicles – potential types of government oversight of the market entry and safety performance of automated vehicles

15Discussion paper
Broadly speaking, the following regulatory options for automated vehicles provide a clear choice between the approaches described in Figure B. The NTC is seeking feedback on the questions below.
Chapter 4: Supporting on-road trialsHow should governments support on-road trials?
Option 1: continue current approach – rely on exemptions, granted on a case-by-case basis, or
Option 2: Option 1, plus support industry development of a code of practice to undertake on-road trials; or
Option 3: Option 1, plus introduce national guidelines to support a consistent approach to on-road trials; or
Option 4: development of uniform legislation to support on-road trials, applied in state and territory road safety laws.
The NTC supports Option 3.
Question 1a: Do you agree that automated vehicle trials should be supported with national guidelines? If not, why?
Question 1b: What key conditions should be included in any national guidelines?
Chapter 5: The changing meaning of control and proper control How should the meaning of control and proper control be adapted for automated vehicles?
Option 1: continue current approach – industry develops its position on the meaning of control and proper control and the concept is tested in the courts, or
Option 2: national enforcement guidelines are developed by governments that clarify a policy position on the meaning of control and proper control for automated vehicles, or
Option 3: the Australian Road Rules and state and territory traffic laws are amended to clarify the meaning of control and proper control for automated vehicles.
NTC supports Option 2.
Question 2a: Do you agree that issues of control and proper control should be addressed through national enforcement guidelines? If not, why?
Question 2b: How should control and proper control be defined?

16Regulatory options for automated vehicles
Chapter 6: Safety assurance for vehicles that do not require a human driver What is the optimum role of governments to ensure the safe operation of automated vehicles that do not require a human driver?
Option 1: governments amend the current regulatory framework by removing barriers for more highly automated vehicles to enter the market, and allow industry to self-regulate the safe operation of automated driving functions, or
Option 2: governments implement a national safety assurance framework to oversee the deployment of automated vehicles that do not require a human driver, in conjunction with removing legal barriers.
The NTC supports Option 2.
Question 3a: Do you agree that governments should oversee the safe operation of automated vehicles though the development of a national safety assurance framework? If not, why?
Question 3b: What objectives and criteria should such a framework include?
Chapter 7: The changing meaning of driver and driving How should governments respond to the legislative definition of the terms driver and driving?
Option 1: continue current approach – rely on exemptions, granted on a case-by-case basis, or
Option 2: expand the meaning of driver in relevant legislation to:
• include an automated driving system; and
• ensure that a legal entity must be responsible for the automated driving system; and
• ensure that the intent of the law can apply to an automated driving system.
The NTC supports Option 2.
Question 4a: Do you agree that the definition of driver and driving should be amended in relevant legislation? If not, why?
Question 4b: What should be the legal obligations of the entity responsible for the automated driving system?
Question 4c: Are there additional legislative regimes that use the definition of driver that should be considered in any future reforms of the definition?
Chapter 8: Identifying responsibility for a vehicle at a point in time How will enforcement agencies interact with automated vehicles and determine who was responsible for a vehicle at a point in time?
Option 1: enforcement agencies continue current approach – in the event of an offence, agencies take action against the human driver or registered owner, or

17Discussion paper
Option 2: enforcement agencies collaborate with industry to develop technology interfaces that enable police to identify automated vehicles and also identify who was responsible for a vehicle at a point in time, or
Option 3: amend state and territory road safety and traffic legislation to deem the automated driving system entity1 of a highly automated vehicle to be responsible for vehicle-related offences.
The NTC supports Option 1.
Question 5: Do you agree that the driver or registered owner should be deemed responsible for the actions of the automated vehicle, and for governments to further investigate options as the technology and market develops? If not, why?
Chapter 9: Vehicle design and standards How should governments approach the issue of vehicle standards for highly and fully automated vehicles?
Option 1: continue current approach – rely on exemptions, granted on a case-by-case basis, until international standards are developed, or
Option 2: adopt new ADRs that support highly and fully automated vehicles.
The NTC supports Option 1. In the longer term, governments should adopt new ADRs and in-service vehicle standards for automated vehicles, in step with the development of international standards.
Question 6: Do you agree that governments should continue to rely on vehicle standards exemptions at this point in time? If not, why?
Chapter 10: Vehicle modification and in-service compliance How should governments respond to the potential risks that in-service non-compliance and vehicle modification could have on an automated driving system?
Option 1: continue current approach – rely on the current regulatory framework to detect and manage non-compliance with in-service vehicle standards, or
Option 2: governments support industry development of modification standards that address automated vehicle issues, or
Option 3: develop national legislation to administer an automated vehicle licensing modification regime, developed as part of the deployment framework for automated vehicles.
The NTC supports Option 2.
Question 7: Do you agree with the development of industry-led standards to address modification of automated vehicles? If not, why?
1 Defined on page 23.

18Regulatory options for automated vehicles
Chapter 11: Liability How should governments support the resolution of liability and insurance complexities?
Option 1: continue current approach – rely on existing liability regimes to resolve liability issues on a case-by-case basis, or
Option 2: Option 1, plus governments support the development of industry guidance, including information about liability and education campaigns, or
Option 3: governments agree to develop nationally-consistent legislation for some or all of the following areas:
• 3a: clarify legal liability for automated vehicle parties, based on levels of automation
• 3b: regulate third-party access to automated vehicle event data information for prescribed purposes
• 3c: harmonise road manager liability provisions
• 3d: address compulsory third-party insurance issues and potential barriers.
The NTC supports Option 2.
Question 8: Do you agree that governments should support industry-led guidance to address automated vehicle liability issues? If not, why?
Chapter 12: Privacy How should governments support the protection of personal information?
Option 1: continue current approach – regulate privacy protection through Australian Privacy Principles and state-based Information Privacy Principles, or
Option 2: Option 1, plus governments and industry develop best-practice guidance for automated vehicles, or
Option 3: governments legislate access to automated vehicle data, including identifiable location information.
The NTC supports Option 1, until the privacy risks of automated vehicles are established.
Question 9: Do you agree that personal information generated by automated vehicles should continue to be regulated by privacy principles and with no additional legislative controls at this time? If not, why?
Additional consultation questions
Question 10: Do you agree with the proposed approach to use different automated vehicle classification systems depending on the purpose for which they are used? If not, why?
Question 11: Are there other issues that we have suggested are out of scope or that have not been identified, and which you think should be considered as part of the NTC project? If so, why?
Question 12: Do you agree with the staged approach to reform and the suggested timeframes to address the identified issues? If not, why?

19Discussion paper
How to make a submission We are seeking submissions on this discussion paper by Monday 4 July 2016.
To make an online submission, visit www.ntc.gov.au and select “Submissions” from the top navigation menu. Or post your comments to:
Att: Automated Vehicle Team National Transport Commission Level 15/628 Bourke Street Melbourne VIC 3000 Australia
Where possible, you should provide evidence to support your views, such as data and documents.
Unless you clearly ask us not to, the NTC will publish your submission online. However, we will not publish submissions that contain defamatory or offensive content.
The Freedom of Information Act 1982 (Cwlth) applies to the NTC.

20Regulatory options for automated vehicles
Key points
• The National Transport Commission (NTC) is reviewing regulations in Australia to identify legal barriers to the introduction of more automated vehicles.
• This paper proposes regulatory options to remove unnecessary legal barriers, support on-road trials and provide for the safe operation of automated vehicles.
Context
ObjectivesAutomated vehicles are vehicles that have one or more element of the driving task that is automated and therefore do not require a human driver for at least part of the driving task. There have been significant automated vehicle technology advancements in recent years, and the NTC has been asked by the Transport and Infrastructure Council to identify regulatory barriers relating to the safe introduction of more automated road and rail vehicles in Australia.
Assessing whether current regulatory frameworks can support automated vehicles enables:
1. Improved understanding of the current regulatory system and its ability to continue to support increased vehicle automation (both road and rail).
2. Identification of any regulatory or operational barriers to be removed or overcome and potential time pressures or options (including for trials of automated vehicles).
3. A nationally-consistent approach for increased vehicle automation.
This discussion paper:
• identifies key issues based on a comprehensive legal audit of Commonwealth, state and territory legislation
• summarises stakeholder feedback to the NTC issues paper, Regulatory barriers to more automated road and rail vehicles (NTC, 2016)
• discusses potential options to address the identified issues.
We are seeking your feedback on the potential options for each of the identified key issues. We will deliver a policy paper with final recommendations to the Transport and Infrastructure Council in November 2016.
Benefits of automated vehicles Numerous studies and reports have identified the potential benefits of automated vehicles (European Commission 2016, KPMG 2015, WA Main Roads 2014, Wagner 2014, NHTSA 2013). In Australia, Austroads is assessing the potential safety benefits of cooperative intelligent transport systems (C-ITS) and automated vehicle technology. Austroads plan to publish its report later this year.
The NTC will not be duplicating the ongoing efforts of governments, industry and academics to evaluate the benefits of automated vehicles. Broadly speaking, automated vehicles could significantly improve road safety outcomes given that the driving task currently undertaken by humans could be more automated, and up to 94 per cent of crashes today are caused by human error (NHTSA 2013). However, the evaluation of the benefits varies, largely due
1

21Discussion paper
to different vehicles operating at different levels of driving automation in different driving scenarios. Net safety benefit assessments will also be impacted by new and emerging safety risks. For example, drivers in some automated vehicles may be required to remain engaged in monitoring the vehicle and be ready to take back the driving task at planned and unplanned times. This creates new risks related to inattention, fatigue and de-skilling (ADVI submission, p.4).
Also, benefits exist other than road safety benefits. Table 1 illustrates potential benefits of automated vehicles from the perspective of key groups in society. It has been adapted from the European Commission’s C-ITS Platform Final Report (2016) which considered the benefits of C-ITS.
Table 1: Potential benefits of automated vehicles from the perspective of key groups in society
POTENTIAL BENEFITS OF AUTOMATED VEHICLES
For society at large
Improved road safety, enhanced mobility and reduced emissions
For businesses For public authorities For citizens
New business opportunitiesImproved freight productivityImproved fuel efficiencyInfrastructure optimisation
Enhanced traffic managementImproved traffic complianceInfrastructure optimisationNew revenue models
Fuel savingsMobility choicesImproved driving experienceImproved interaction with other road users
Many of these benefits are dependent on specific applications, technologies or assumptions about changing driver behaviours and attitudes. For example, improved traffic management will be optimised if automated vehicles adopt C-ITS technology, while improved interaction with other road users (including vulnerable road users such as cyclists and pedestrians) will depend on the accuracy and agility of sensor technology.
Some of these benefits are also dependent on highly or fully automated vehicles. For example, improved mobility for the elderly and disabled will be achievable in automated vehicles that have no requirements for a human to drive, monitor or intervene in the operation of the vehicle.
Regulatory options that are discussed in this paper recognise that there are anticipated to be net benefits for society, but that regulation may have a role ensuring that the costs are safely managed.
What is the problem?Governments have historically regulated transport to ensure safety, security, efficiency and environmental outcomes. New technologies do not fit within the existing regulations and this creates regulatory uncertainty and the risk of inconsistent regulation. The role of government in relation to these new technologies remains to be seen.
Regulatory uncertainty
Vehicle manufacturers are progressively introducing increased levels of automated driving controls in their vehicles. Manufacturers are progressing along different paths and there is no certainty as to how automated vehicles will be developed and commercialised in the future.

22Regulatory options for automated vehicles
For example, some manufacturers are focussed on conditional driving automation that will not require a human to monitor the driving environment but rather monitor the automated driving system and to be the fallback for the dynamic driving task. Others are focussed on developing highly automated vehicles that do not require any human driver but only operate on clearly defined low-speed pedestrian zones with no interaction with other vehicles, such as a university campus or airport precinct.
As the technology develops, and progresses in different ways, manufacturers and technology developers are increasingly asking regulators for input related to testing of compliance and clarification of rules for automated vehicles (Dr Hussein Dia submission, p.2).
Issues such as interaction between road transport laws and consumer protection laws, vehicle standards, road rules, as well as liability and insurance, and common law requirements need to be addressed (Glancy et al., p.58).
These trends have raised questions from industry and governments about whether Australia’s current regulatory frameworks can support conditional, highly and/or fully automated vehicles on public roads. Our regulations need to support a mixed environment with a variety of automated vehicle types, while also supporting conventional vehicles with human drivers.
Risk of inconsistent regulation
Australia is a federation of states and territories. The Australian Government has responsibility for design rules for new vehicles, but the state and territory governments have jurisdiction over road rules, enforcement, registration and licensing. There is a risk that this complex regulatory framework will result in inconsistent regulation of automated vehicles across states and territories.
The risk of inconsistent regulation was a key message recently made by Google Inc. in testimony to the United States Congress:
If every state is left to go its own way without a unified approach, operating self-driving cars across state boundaries would be an unworkable situation and one that will significantly hinder safety innovation, interstate commerce, national competitiveness, and the eventual deployment of autonomous vehicles (Dr Chris Urmson, 2016).
In addition, there is a potential risk that national regulation in Australia will be inconsistent with international standards and conventions. This could be a significant barrier for the introduction of automated vehicles in Australia, given that the automotive industry is globally integrated and Australia currently takes up less than 1.5 per cent of global vehicle sales (FCAI submission, p.4).
The role of government has not been determined
It has not been determined what regulatory mechanisms governments will implement to support the safe operation of automated vehicles on public roads. Governments could choose to rely on existing regulatory safety nets, including Australian Design Rules (ADRs), and in-service vehicle standards and road rules, to safely manage automated vehicles. Alternatively, additional regulatory mechanisms could be introduced to ensure automated vehicles meet minimum safety criteria and that an identifiable legal entity is responsible for the automated driving system. This could be achieved through some form of automated vehicle registration, accreditation or licensing.
Until these regulatory settings are resolved, industry faces uncertainty about how automated vehicles can operate in Australia and what regulatory compliance requirements will be expected of them.

23Discussion paper
Key terms used in this paper
Automated driving system means the operating system that controls the automated vehicle functions.
Automated driving system entity means the legal entity responsible for the automated driving system. This could be the manufacturer, operator, legal owner of the vehicle or other entity.
Safety assurance framework means a regulatory mechanism for governments to assess the safety performance of an automated vehicle to ensure it can operate safely on the network. It could operate though the introduction of automated vehicle registration, or the accreditation or licensing of the automated driving system entity.
Cooperative Intelligent Transport Systems (or C-ITS) means the use of wireless communications to exchange data between vehicles, and with roadside infrastructure, including data on vehicle movements, traffic signs and road conditions.
Levels of automation referred to throughout this paper:
Partially automated means that the automated driving system may take control of steering, acceleration and braking in defined circumstances, but the human driver must continue to monitor the driving environment and the driving task, and intervene if requested.
Conditionally automated means that the system drives the vehicle for sustained periods of time. The human driver doesn’t have to monitor the driving environment, but must continue to monitor the automated driving system, intervene if requested and be the fallback for the dynamic driving task.
Highly automated means that the system drives the vehicle for sustained periods of time in some situations, or all of the time in defined places, and no human driver is required to monitor the driving environment and the driving task, or to intervene, when the system is driving the vehicle.
Fully automated means that all aspects of the driving task and monitoring of the driving environment and the dynamic driving task are to be undertaken by the vehicle system. The vehicle can operate on all roads at all times.
» See the glossary at the end of this paper for descriptions of specialist and unusual terms used.
Assumptions adopted in this paper • It will be many years before the commercial large-scale deployment of highly or fully
automated vehicles that have no human driver and are not required to meet current vehicle standards, such as a steering wheel.
• Low-speed passenger shuttle vehicles with no human drivers are soon to be trialled in Australia and could be deployed sooner than other highly automated vehicles, but they are likely to have limited and defined operation on the network and could operate under the current exemption framework for some time to come.

24Regulatory options for automated vehicles
• In the longer term, the international community will develop and agree vehicle standards for automated vehicles that do not have a human driver.
• Enforcement of road rules and vehicle standards will continue to be primarily based on roadside enforcement for the foreseeable future.
Strategic contextAustralia is already undertaking a number of road and rail automated vehicle trials and research. Our project to address regulatory barriers of automated vehicles supports other research and project activities undertaken by the Australian Government, Austroads and state and territory road agencies.
Internationally, a number of countries are reviewing legislation and regulation to prepare for automated vehicles, including the United States and the European Union. In April 2016, European transport ministers released the Declaration of Amsterdam on connected and automated driving. Member States agreed in the Declaration that the Vienna and Geneva conventions on road traffic should be further revised to allow the use of connected and automated vehicles on public roads, and that Member States should, where possible, remove legal barriers to the testing and deployment of connected and automated vehicles (European Council 2016, p.7).
Austroads has a program focussed on the operational arrangements that will support automated vehicles on our road networks. Current projects being undertaken are examining:
• the safety benefits of automated vehicles
• the impacts of automated vehicles on registration and licensing requirements
• the potential impacts of automated vehicles on road network operations.
The NTC is working closely with the Australian Government and Austroads to ensure we adopt consistent assumptions and share experiences and findings across projects.
We understand that other organisations are planning technical research, trials or demonstrations in the near future. The NTC welcomes feedback on any new regulatory issues that emerge as a result of these further trials and research.
This project on automated vehicles identifies some current barriers. In mid-2016, we propose to start broader work to explore how we could regulate land transport in the future.
Project method and timeframes 1. Issues paper: in February 2016 the NTC published Regulatory barriers to more automated road and rail vehicles. The issues paper was an initial review of regulations in Australia and it provided an overview of current rules and identified key issues and potential solutions.
The NTC received 32 submissions, including submissions from state and territory governments in Australia, the New Zealand Ministry of Transport, police agencies, law societies, manufacturers, insurers and academics. Submissions can be accessed on the NTC website under “Current Projects” and a list of contributors is provided in the submissions listing at the end of this paper.
2. Legislative audit: to support our analysis, the NTC has undertaken extensive examination of international, Commonwealth, and state and territory legislation to identify barriers and issues to more highly automated vehicles. Where relevant, these are referenced in this discussion paper. This analysis provides a starting point for any future legislative amendments. The full analysis of the legislative audit is contained in the annex and is available on the

25Discussion paper
NTC website under “Current Projects.” The annex accompanies this discussion paper as a supporting document.
3. Further consultation: submissions to this discussion paper will be used to finalise options for consideration by the Transport and Infrastructure Council.
4. Recommendations to ministers: the NTC will submit policy recommendations to the Transport and Infrastructure Council in November 2016. Subject to ministerial feedback and agreement, the NTC will publish a policy paper outlining the agreed recommendations.
Table 2 provides an overview of the project’s timelines and milestones.
TABLE 2: NTC PROJECT TIMELINES AND MILESTONES
Timeline Project milestone
4 July 2016 Submissions to this discussion paper close.
4 November 2016 Based on submission feedback, the NTC will make policy recommendations to the Transport and Infrastructure Council.
December 2016 Subject to decisions made by the Transport and Infrastructure Council in November, the NTC will publish a policy paper outlining the direction of ministers and agreed reforms.
2017 onwards Subject to decisions made by the Transport and Infrastructure Council in November, work on national reforms to support automated vehicles will commence.
ScopeAutomated vehicles encompass a potentially disruptive technology that could generate significant societal changes. Automated vehicles are likely to pose challenges in a number of policy areas, including driver training, licensing, vehicle registration and the regulation of on-demand transport services. There are also important policy challenges related to how humans engage safely with automated vehicles (human factors and the human-machine interface) and the protection of vulnerable road users.
Some of these challenges will be addressed indirectly by the NTC in our discussion of the potential need for a safety assurance framework (see Chapter 6) that could provide governments with a regulatory mechanism to ensure that safety issues are addressed before automated vehicles operate on our roads. However, our project does not seek to address the policy and safety content of issues such as the human-machine interface and vulnerable road users in detail.
What is proposed as being in scope
The NTC project is focussed on regulation – that is, identifying and addressing issues and barriers that relate directly to legislation or regulatory frameworks in which automated vehicles will operate. The key focus area is road vehicles (including light and heavy vehicles).
Other legislation that could include barriers to automated vehicles is also reviewed. This includes:
• access and use of data, including privacy protections and access to automated vehicle data for enforcement, crash investigation or other commercial purposes

26Regulatory options for automated vehicles
• liability of the human driver, manufacturer and other parties
• competition and consumer law
• vehicle modification
• passenger transport laws
• tolling and responsibilities of private road operators
• traffic accident compensation schemes
• the application of criminal law.
Security from cyber-attacks and malicious intent, and any minimum standards for data management, communications protocols or mapping are also considered in the context of potential criteria for any safety assurance framework and vehicle standards.
We are reviewing legislation and regulatory frameworks for three scenarios:
1. On-road trials and demonstrations.
2. Automated driving that requires a human driver.
3. Automated driving that does not require a human driver.
What is proposed as being out of scope
Automated trains
The NTC was tasked with identifying any regulatory barriers associated with more automated rail. We found that there are unlikely to be regulatory barriers to the introduction of more automated trains in Australia. Under the existing legislative framework of the Rail Safety National Law (RSNL), those who design, commission, manufacture, supply, install or erect rail infrastructure or rolling stock must ensure, so far as reasonably practicable, that they are safe.
Provided an operator can ensure the safety, so far as reasonably practicable, of its automated rail operations and gain accreditation by satisfying the Office of the National Rail Safety Regulator (ONRSR) that it has the competence and capacity to manage the risks associated with its operations, it would be able to operate those services.2
There may be operational challenges related to establishing a safety case for automated trains that are operating on shared systems and interact with other types of trains, other transport modes or vulnerable road users. These could in part be addressed through the development of international and national standards. However, under the accreditation model, these challenges are the responsibility of rail operators to identify and manage and are not regulatory barriers.
Rail safety is well designed for future developments in that its focus is on risk mitigation and positive safety obligations that are generally flexible and adaptable (State Growth Tasmania submission, p.1).
For these reasons, the NTC proposes that no further analysis of automated rail is required at this time.
Submissions to the issues paper largely support this view, including feedback from the ONRSR. However, recognising that trains, light rail and road vehicles interact, we have included in the draft safety assurance framework criteria a requirement for an automated road vehicle to be able to safely interact with trains and light rail (see Chapter 6).
2 The Queensland Transport (Rail Safety) Act 2010 applies similar principles. In December 2015, the
Queensland Government announced it would join the national scheme.

27Discussion paper
Review of safe distance rules to support heavy vehicle platooning
In the issues paper we identified that the current road rules require long vehicles to keep minimum distances of up to 60 metres on single-lane roads. This was identified as a potential barrier to heavy vehicle platooning3 if there was policy agreement that it would be safe and appropriate for heavy vehicle platooning to operate on single-lane roads.
Stakeholder feedback to the issues paper was clear and consistent: the current approach ensures that heavy vehicles can be safely overtaken by light vehicles and that heavy vehicle platooning on single-lane roads is likely to have negative road safety outcomes.
For these reasons, the NTC proposes that no further analysis of safe distance rules to support heavy vehicle platooning on single-lane roads is undertaken at this time.
Issues being addressed by Austroads
This NTC project does not duplicate Austroads projects. Austroads is focussed on the operational aspects of supporting automated vehicles, including the design, maintenance and operation of road networks, the registration of vehicles, and the training and licensing of drivers. Key issues and findings from the Austroads program continue to be inputs to the NTC project.
Powered two-wheelers and other vehicles
Vehicle manufacturers are focussed on increasing the level of driving automation in passenger vehicles and heavy vehicles due to the technical feasibility for automation in these vehicle types. Other vehicle categories, such as powered two wheelers, do not currently have as strong a case for automation of the driving task at this point in time.
The suggestion raised through the submission process that the project address the regulation of autonomous wheeled robot delivery services (Queensland TMR submission, p. 11) is currently outside the NTC project mandate set by the Transport and Infrastructure Council.
Broader societal issues
Broader societal issues out of scope at this time include:
• impacts on traffic and congestion
• land use planning
• urban parking
• public transport demand
• ride-sharing and taxi reform
• industrial relations issues related to changing job opportunities.
These are complex policy and planning challenges that require further research and understanding before regulatory options are considered.
The NTC plans to submit reform recommendations to the Transport and Infrastructure Council in November 2016. The decisions made by the Council will be reflected in a final policy paper to be published by the NTC in late 2016.
3 See the glossary at the end of this paper for a description of “platooning.”

28Regulatory options for automated vehicles
Consultation
Your views on the regulatory options for automated vehicles will be essential and we encourage you to make a submission.
Consultation questions You are invited to respond to any of the following consultation questions:
Question 1a: Do you agree that automated vehicle trials should be supported with national guidelines? If not, why? Question 1b: What key conditions should be included in any national guidelines?
Question 2a: Do you agree that issues of control and proper control should be addressed through national enforcement guidelines? If not, why? Question 2b: How should control and proper control be defined?
Question 3a: Do you agree that governments should oversee the safe operation of automated vehicles though the development of a national safety assurance framework? If not, why? Question 3b: What objectives and criteria should such a framework include?
Question 4a: Do you agree that the definition of driver and driving should be amended in relevant legislation? If not, why? Question 4b: What should be the legal obligations of the entity responsible for the automated driving system? Question 4c: Are there additional legislative regimes that use the definition of driver that should be considered in any future reforms of the definition?
Question 5: Do you agree that the driver or registered owner should be deemed responsible for the actions of the automated vehicle, and for governments to further investigate options as the technology and market develops? If not, why?
Question 6: Do you agree that governments should continue to rely on vehicle standards exemptions at this point in time? If not, why?
Question 7: Do you agree with the development of industry-led standards to address modification of automated vehicles? If not, why?
Question 8: Do you agree that governments should support industry-led guidance to address automated vehicle liability issues? If not, why?
Key points
• Any individual or organisation can make a submission to the NTC.
• We are seeking submissions on this discussion paper by Monday 4 July 2016.2

29Discussion paper
Question 9: Do you agree that personal information generated by automated vehicles should continue to be regulated by privacy principles and with no additional legislative controls at this time? If not, why?
Question 10: Do you agree with the proposed approach to use different automated vehicle classification systems depending on the purpose for which they are used? If not, why?
Question 11: Are there other issues that we have suggested are out of scope or that have not been identified, and which you think should be considered as part of the NTC project? If so, why?
Question 12: Do you agree with the staged approach to reform and the suggested timing to address the identified issues? If not, why?
Consultation questions are provided as a guide only. You are welcome to provide us with feedback on any aspect of the discussion paper.
You may wish to consider:
• is the definition of the problem accurate?
• what are the broad options for reform?
• what are likely to be the costs and operational impacts of the problem for businesses/operators and other organisations?
• what are likely to be the costs and operational impacts of the problem on the broader community?
When to submit We are seeking submissions on this discussion paper by Monday 4 July 2016.
How to submitAny individual or organisation can make a submission to the NTC.
To make an online submission, visit www.ntc.gov.au and select “Submissions” from the top navigation menu. Or post your comments to:
Att: Automated Vehicle Team National Transport Commission Level 15/628 Bourke Street Melbourne VIC 3000 Australia
Where possible, you should provide evidence to support your views, such as data and documents.
Unless you clearly ask us not to, the NTC will publish your submission online. However, we will not publish submissions that contain defamatory or offensive content.
The Freedom of Information Act 1982 (Cwlth) applies to the NTC.

30Regulatory options for automated vehicles
Classifying automated driving functions
Introduction There are different ways in which an automated vehicle can be defined, categorised and understood. The 2016 NTC issues paper suggested that the key to a flexible and performance-based regulatory framework is agreed classification systems for automated driving, and we adopted the SAE International Standard J3016 Levels of Driving Automation because it is the most commonly used approach to make sense of different applications of automated driving.
In April 2016, European transport ministers agreed in the Declaration of Amsterdam that common definitions of connected and automated driving should be developed and updated, ‘based on the SAE levels as a starting point’ (European Council 2016, p.6).
The SAE International Standard J3016The 2016 issues paper provided a concise overview of the SAE International Standard J3016 Levels of Driving Automation. The levels are based on whether the driver or the automated driving system undertakes:
• execution of steering and acceleration/deceleration
• monitoring of the driving environment
• fallback performance of the dynamic driving task
• system capability (whether the system has the capability to undertake all or some driving modes).
The benefit of this approach is that the classification system can make sense of a wide range of technologies, use cases and automated vehicle applications by defining who is responsible for the vehicle – the human driver or the system.
The issues paper further suggested that an agreed classification of automation will enable legal instruments to reference an automation function rather than identify and address every automated application.
The SAE International Standard J3016 has six levels of driving automation from no automation (level 0) to full automation (level 5). Figure 1 reproduces the SAE International Standard J3016. A key feature of the standard is that at level 3 (conditional automation), although the automated driving system undertakes all the driving tasks, the human driver continues to monitor the vehicle system and must respond appropriately and safely to a request
Key points
• The key to a flexible and performance-based regulatory framework is agreed classification systems for automated driving.
• There are three classification systems that could be used, the first based on levels of automation, the second based on use cases4 and the third based on behavioural competencies.
• The relevant classification system used to define and understand an automated vehicle should depend on the purpose for which the classification is being used.
4 See the glossary at the end of this paper for a description of “use case.”
3
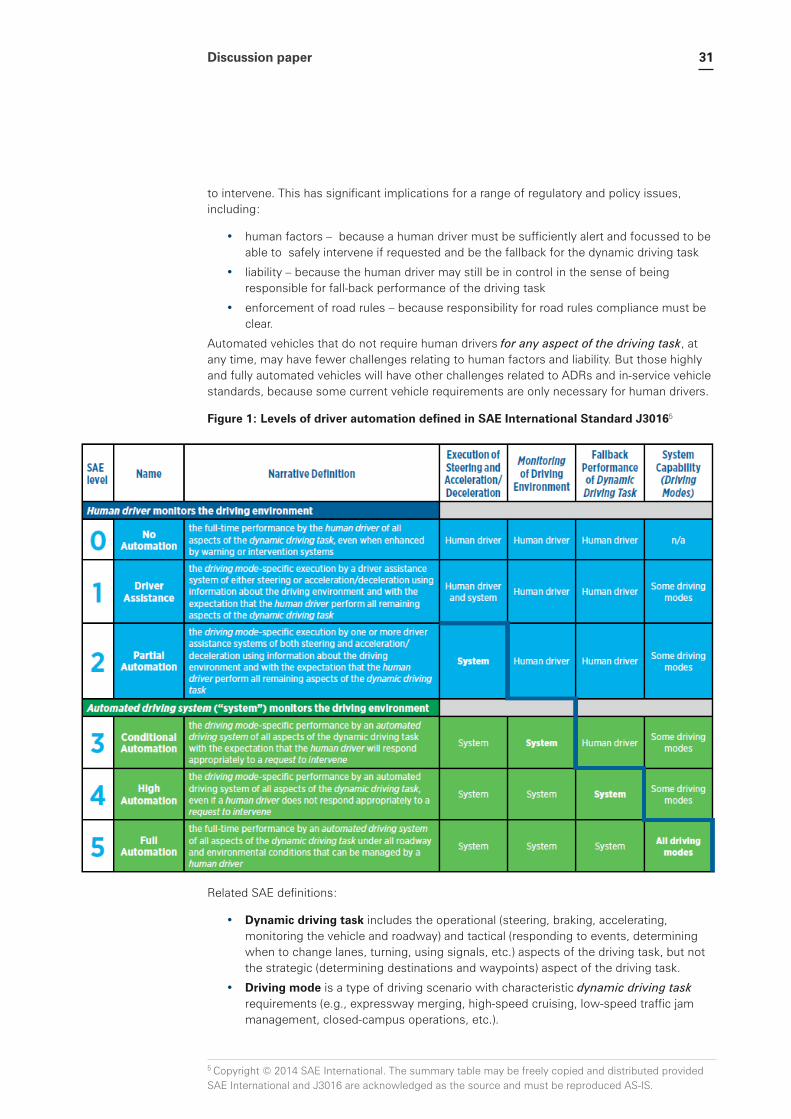
31Discussion paper
to intervene. This has significant implications for a range of regulatory and policy issues, including:
• human factors – because a human driver must be sufficiently alert and focussed to be able to safely intervene if requested and be the fallback for the dynamic driving task
• liability – because the human driver may still be in control in the sense of being responsible for fall-back performance of the driving task
• enforcement of road rules – because responsibility for road rules compliance must be clear.
Automated vehicles that do not require human drivers for any aspect of the driving task, at any time, may have fewer challenges relating to human factors and liability. But those highly and fully automated vehicles will have other challenges related to ADRs and in-service vehicle standards, because some current vehicle requirements are only necessary for human drivers.
Figure 1: Levels of driver automation defined in SAE International Standard J30165
Related SAE definitions:
• Dynamic driving task includes the operational (steering, braking, accelerating, monitoring the vehicle and roadway) and tactical (responding to events, determining when to change lanes, turning, using signals, etc.) aspects of the driving task, but not the strategic (determining destinations and waypoints) aspect of the driving task.
• Driving mode is a type of driving scenario with characteristic dynamic driving task requirements (e.g., expressway merging, high-speed cruising, low-speed traffic jam management, closed-campus operations, etc.).
5 Copyright © 2014 SAE International. The summary table may be freely copied and distributed provided SAE International and J3016 are acknowledged as the source and must be reproduced AS-IS.

32Regulatory options for automated vehicles
• Request to intervene is notification by the automated driving system to a human driver that he or she should promptly begin or resume performance of the dynamic driving task.
Partial automation
Partial automation exists in the road vehicle fleet today. While the system may take control of executing steering, acceleration and braking in defined circumstances, the human driver must continue to monitor the driving environment and the driving task and intervene if required:
• The system executes some of the dynamic driving tasks.
• The human driver monitors the driving environment.
• The human driver monitors the dynamic driving task and must respond appropriately to a request to intervene.
EXAMPLES OF PARTIALLY AUTOMATED APPLICATIONS
• Auto Parking Assist: the vehicle self-parks but the driver remains in the driving seat and must monitor the environment during the automation mode and intervene if requested.
• Highway Driving Assist: the vehicle can maintain an appropriate speed, safe distance to other vehicles and lane position, but the driver must monitor the environment during the automation mode and be ready to intervene if required.
Conditional automation
Manufacturers are already developing prototypes or limited release vehicles with conditional automation. In a conditionally automated vehicle:
• The system drives the vehicle for a sustained period of time.
• The system monitors the driving environment while in automated driving mode.
• The human driver monitors the automated driving system and must respond appropriately to a request to intervene.
EXAMPLES OF VEHICLES THAT ARE CONDITIONALLY AUTOMATED
• Automated Highway Driving: the system takes control of driving and monitoring the road environment on high-to-mid speeds on specific roads, but the driver monitors the automated driving system.
• Heavy Vehicle Platooning: except for the lead truck in the platoon, the system takes control of driving and monitoring the road environment on specific roads, and the driver monitors the automated driving system.
High automation
Vehicles with a high level of automation are already being trialled or demonstrated, with prototypes currently under development. In a highly automated vehicle:
• The system drives the vehicle for sustained periods of time, or all of the time in defined places.
• The system monitors the driving environment.

33Discussion paper
• The system monitors the dynamic driving task and does not require a human driver to respond to a request to intervene.
Based on work undertaken by the United Nations Economic Commission for Europe (UNECE) World Forum for Harmonisation of Vehicle Regulations (WP.29) and the International Organisation of Motor Vehicle Manufacturers (OICA), a high level of automation can be achieved under two scenarios:
1. A vehicle that is always fully automated, but is limited in where it can operate.
2. A vehicle that can be fully automated some of the time, but can drive everywhere at a lower level of automation.
Highly automated vehicles may be technologically advanced, but some of these vehicles are designed to operate in a driving environment that has relatively low complexity. For example, a driverless passenger shuttle operating at low speeds in a pedestrian precinct, with minimal contact with other road vehicles and on a planned circuit, is highly automated from an SAE International Standard perspective but involves a less complex driving environment than an urban road network.
EXAMPLES OF HIGHLY AUTOMATED VEHICLES
• Fully automated all the time, but on a limited network: a human driver is not required to drive the vehicle, to monitor the driving environment or the driving task. EasyMile and Navya produce vehicles, for example, that only operate on specified routes at low speed, in a controlled environment with no or limited interaction with other motor vehicles.
• Fully automated some of the time, but can drive everywhere at a lower level of automation: Google Inc. has developed a prototype on-road vehicle that does not require a human driver to drive the vehicle, to monitor the driving environment or the driving task. It requires the route to be appropriately mapped before being driven by the automated vehicle, but a human can drive the vehicle on roads that have not been mapped.
Full automation
Full automation requires all aspects of the driving task and monitoring of the driving environment and the dynamic driving task to be undertaken by the vehicle system. According to the SAE International Standard J3016, full automation system capability is functioning across all driving modes and can therefore operate on all roads at all times. For these reasons, full automation is not anticipated in the short to medium term. In a fully automated vehicle:
• The system drives the vehicle at all times on all roads and under all conditions.
• The system monitors the driving environment at all times and under all conditions.
• The system monitors the dynamic driving task at all times and under all conditions and will not require a human driver to intervene.
Issues with classifying automated vehicles The concept of “levels of automated driving” does not factor in the wide diversity of technologies and use cases within each level. For example, both traffic-jam assist and auto-parking assist could be considered the same level of automation but are operating at different speeds in different driving environments and have different policy challenges and risk profiles.

34Regulatory options for automated vehicles
There are effectively two types of “highly automated” (level 4) vehicles, and each has distinct regulatory challenges:
• vehicles that are always automated but are limited in where they can go – the key regulatory challenge relates to vehicle standards and road access
• vehicles that are fully automated some of the time – the key regulatory challenges are identifying who is responsible for a vehicle at a point in time and human factors.
In the example of traffic-jam assist and auto-parking assist, it may be more useful for road agencies to assess the performance of automated vehicles by understanding the vehicle’s behavioural competencies to meet the requirements of the road rules, rather than a “level of automated driving.”
However, in other circumstances classifying an automated vehicle according to its level of automation is more relevant than understanding the automated vehicle according to a use case. For example, what manufacturers describe as “valet parking” or similar could be:
• a vehicle that self-parks but requires a human to stand within close range of the vehicle and monitor the vehicle self-parking and stopping the process by remote control if required (conditionally automated); or
• a vehicle that self-parks without requiring any human monitoring or intervention (highly automated).
Prototypes of both these approaches have been developed by manufacturers and both are described as “valet parking” or in similar language. The use cases are very similar. Yet the legal implications are markedly different, with responsibility for the vehicle in the first scenario likely to rest with the human driver, while in the second scenario, responsibility for the vehicle is likely to rest with the automated driving system entity. To determine who is responsible for the vehicle, the SAE levels of automation are more important than the use case.
There are also alternative classifications of automation that could be used, primarily the National Highway Traffic Safety Administration (NHTSA, United States) five levels of automation that broadly equate to the SAE approach but use different language and parameters.
It is Australian Government policy that, wherever possible, vehicle standards in Australia should be consistent with United Nations standards. There are not currently any agreed automated vehicle standards under the UNECE, but if WP. 29 adopted a classification system that departed from SAE International Standard J3016, this should be looked at very closely. It is also noted that the SAE International Standard J3016 is currently under review and is expected to be further refined as automated vehicle technology develops, but the basic approach is expected to remain in place.
Feedback from the issues paper Stakeholder submissions to the issues paper were broadly supportive of adopting SAE International Standard J3016 Levels of Driving Automation for the time being. There were different views on how and in what circumstances the classification system should be used.
• Queensland Transport and Main Roads (TMR), NSW Government, WA Main Roads, State Growth Tasmania, Northern Territory Government, Victoria Police, FCAI,6
IAG, ADVI, Toll Group, ConnectEast and Griffith law school offered support for the use of SAE International Standard J3016 to define and understand automated vehicle functions.
• Queensland TMR stated that it is desirable to create a simple and robust legislative environment for automated vehicles. Either a vehicle must have a human driver
6 See the list of submissions at the end of this paper for a full description of organisation acronyms.

35Discussion paper
monitoring the driving task who is ready to take manual control back from the vehicle at any time, or it can operate without a human driver and all vehicle occupants are considered passengers. TMR believes these are the two main distinctions that will require a regulatory solution.
• State Growth Tasmania stated that adopting the SAE classification should not tie authorities into particular legal and technical definitions in the future that may not be appropriate. The classification will need monitoring and revision as the technology and regulation matures.
• NSW Police noted that the difficulty using the SAE classification is that it is a technical description of what a vehicle may or may not do. It is not a legal descriptor of who has operated or put these self-operating functions into motion.
• NZ Ministry of Transport suggested there is a need for classification when discussing types of technologies, but the Ministry has not thought that it would need to use such classifications in legislation.
• IAG noted that finding a way to embed a common way of describing the level of vehicle automation is critical for consumers, law-makers, insurers, manufacturers and those underwriting statutory personal injury schemes.
• FCAI noted that the UN’s international forum on Road Traffic Safety (WP. 1) has been considering the role of the driver in respect to increasing levels of automation and what changes, if any, are required to the Convention on Road Traffic. Australia should monitor this process and consider if any similar changes will be needed to any Australian legislation or standards in order to achieve international consistency.
• Warren Centre (University of Sydney) cautioned that the SAE classifications are technical rather than legal or regulatory. Developing a set of terms that can allow regulatory analysis is necessary.
Different approaches to classifying automated vehicles will be important It is clear from submission feedback that the SAE International Standard J3016 is broadly supported, but alternatives should be further considered and where possible incorporated into policy making decisions. These relate to use cases and behavioural competencies. There are consequently three different approaches put forward here for consideration:
1. Classifying automated vehicles based on the level of driving automation
The SAE International Standard J3016 could be used to support this approach. Applications are not defined and, as discussed above, the levels are based on whether the driver or the automated driving system undertakes the driving or monitoring tasks.
Benefits of classifying based on levels of automation:
• application and technology neutral
• clearly defines “control” and helps clarify legal responsibility and liability
• could be referenced in legal instruments and manufacturers decide the relevant level for specific applications or technologies.
Disadvantages of classifying based on levels of automation:
• parameters of each level need to be clearly defined and made relevant to different automated vehicle applications
• the “level of driving automation” is less relevant than use cases when evaluating the vehicle’s safety performance or infrastructure needs

36Regulatory options for automated vehicles
• the concept of “levels” gives an impression in the market that the process of automation is linear and that human-machine interface demands on consumers will be consistent across different applications within the same level of automation.
2. Classifying automated vehicles based on behavioural competencies
An alternative approach is to classify automated vehicles based on behavioural competencies. The automated vehicle is defined according to its ability to conform safely to the road rules. For example, if an automated vehicle is capable of safely changing lanes autonomously, with appropriate use of indicators and vehicle spacing, then that behavioural competency can be recognised in the approval of that vehicle’s operation.
This is becoming a preferred system of classification for some road agencies overseas because it allows for a performance-based assessment of vehicle competency, whereas a classification based on a vehicle level is broader and less meaningful for the purpose of assessing safety performance and road rules compliance.
Benefits of classifying based on behavioural competencies:
• application and technology neutral
• could be clearer to the human driver what the automated driving system can and cannot do
• can support human machine interface safety outcomes
• clearly defined competencies support the assessment of a safety case and compliance with road rules.
Disadvantages of classifying based on behavioural competencies:
• a single vehicle could have hundreds of behavioural competencies of varying importance and safety risk, which could be difficult for policy-makers and consumers to make sense of without a safety risk assessment
• does not clearly define who controls the vehicle
• there is not a single standard or “single source of truth” to define every use case
• does not necessarily provide an overarching taxonomy or language to categorise and understand the importance of each competency relative to another competency.
2. Classifying automated vehicle based on use cases
Automated vehicles could also be classified by use cases. That is, understanding different automated vehicles based on specific applications or functions, such as auto parking assist, automated highway driving or truck platooning. The use case is defined based on what actions the vehicle can undertake, and in that sense is closer to behavioural competencies than levels of automated driving.
Benefits of classifying based on use cases:
• could be the simplest way for consumers to understand different automated vehicles
• could be clearer for the human driver or consumer what the automated driving system can and cannot do.
Disadvantages of classifying based on use cases:
• could be difficult to apply use cases in policy without restricting automated vehicles to specific applications or technologies
• similar use cases could have significantly different safety and policy challenges that could become less clear if only this approach is followed
• there is not a single standard or “single source of truth” to define every use case
• does not provide an overarching taxonomy or language to categorise use cases
• does not clearly define who controls the vehicle.

37Discussion paper
Proposed approach The appropriate classification system used to define and understand automated vehicles will depend on the purpose for which the definition is being used. Therefore, taking into consideration the benefits and disadvantages of each approach, the NTC proposes that no single classification system should be preferred over any other, and that any of the three approaches discussed above should be able to be used in policy and guidelines where it is most relevant and most useful to do so.
Figure 2 illustrates how the various ways of classifying automated vehicles have a valuable role in the development of a regulatory and operational framework for automated vehicles.
Relevant to address infrastructure or technology requirements.
Example: Automated highway driving or heavy vehicle platooning.
Relevant when ensuring the vehicle can operate safely.
Example: Behavioural compliance with the road rules.
Relevant when identifying who is responsible for the vehicle.
Example: Vehicle classified as “highly automated” means the automated vehicle system entity is responsible.
Defining automated
vehicles
Behavioural competencies
Use cases
Levels of automation
Figure 2: Different ways to classify and define automated vehicles

38Regulatory options for automated vehicles
Levels of automation are most relevant when defining control. Understanding automated vehicles based on use cases help to address infrastructure or technology requirements. Understanding automated vehicles based on behavioural competencies helps to assess whether a vehicle can conform to the road rules and operate safely.
Conclusion In summary, the NTC is seeking consultation feedback on the following proposal:
1. The SAE International Standard J3016 is the preferred taxonomy to define the levels of driving automation. However, government and industry stakeholders should review this position over time, particularly in reference to any comparative standards adopted by UN WP.29.
2. A classification system for automated vehicles should not be embedded in legislation at this time.
3. Regulatory policy for automated vehicles, including enforcement guidelines, should use any of the following classification systems, as determined by the purpose for which the classification system is to be used:
• classifying automated vehicles based on the level of driving automation
• classifying automated vehicles based on behavioural competencies
• classifying automated vehicles based on use cases.
4. Government and industry stakeholders in Australia should support further standardisation of behavioural competencies and use cases in alignment with international standards and practices.

39Discussion paper
Key points
• On-road trials are necessary to ensure that automated systems can operate safely and efficiently in Australian conditions, and for building public understanding and confidence.
• Road agencies can already offer industry legal exemptions or road closures, but these approaches could result in different trial standards, processes and requirements across jurisdictions.
• Governments can support comprehensive, nationally-consistent and efficient on-road trials by:
– supporting development of a code of practice, or
– endorsing national guidelines, or
– agreeing to consistent legislation for trialling and testing automated vehicles.
Supporting on-road trials
Introduction The significant difference between conventional and automated vehicles is that automated vehicle technologies “sense and make judgments about the vehicle’s external environment, which cannot be controlled and can vary tremendously in terms of other vehicular traffic on the road, pedestrians and other road users, static objects, the quality of road itself and road elements (e.g., lane markings and signs), and weather and lighting conditions” (Anderson 2016, p. 107). The performance requirements of automated vehicles, including sensor functionality in different road and traffic environments, will be critical.
Testing of automated vehicles on public roads in Australia will therefore be important to ensure that different automated vehicles can operate safely on our roads. Field tests and trials can also build public understanding and confidence in automated vehicles.
Issues A range of trials and demonstrations are planned by governments and industry in Australia in the next few years. The Australian Government and all road transport agencies have exemption powers that could be used to allow automated vehicles to operate on public roads that would otherwise not meet design standards or be able to comply with particular road rules. Alternatively, road agencies can temporarily close roads to general public use to test or demonstrate an automated vehicle.
There are some challenges with general exemption powers or road closures:
• exemption powers are broad in scope and there is a high risk that a patchwork of trial standards and processes will develop across states and territories
• reliance on exemption powers or road closures without published guidelines for automated vehicles could result in a lack of national consistency in relation to trial terms and conditions, insurance and driver skill requirements
• reliance on exemption powers could be a higher cost and time intensive option for industry
4 MEDIUM-TERM REFORM
LONGER-TERM REFORM
CLARIFY THEN REFINE
NEAR-TERM REFORM

40Regulatory options for automated vehicles
• a key issue is understanding how automated vehicles operate around other vehicles and vulnerable road users – closing public roads to other traffic limits the ability to address this key issue.
For these reasons, the issues paper canvassed additional mechanisms to support on-road trials:
1. Introducing specific legislation permitting on-road testing.
2. Publishing guidelines or a code of practice for on-road testing – possibly in conjunction with automated vehicle testing legislation or using existing exemption powers.
Government support for field tests and trials provides an opportunity to ensure trials are conducted safely, to improve the safety case for future deployment, to increase public confidence in automated vehicles, and to reduce costs for industry by developing nationally-consistent trial conditions.
Feedback from the issues paperStakeholder feedback to the issues paper emphasised the value of national consistency. Stakeholders acknowledged that trials could be undertaken using current exemption processes, but there is significant value in state and territories adopting national testing guidelines or a code of practice.
• Queensland TMR, NSW Government, WA Main Roads, Northern Territory Government, IAG, FCAI, ConnectEast recognised the value of nationally-consistent guidance to support on-road trials, whether that be through national guidelines or an industry code of practice.
• Queensland TMR and AAA flagged the option of recognising international testing results. It may not always be necessary to undertake our own specific testing regime.
• State Growth Tasmania noted that while there hasn’t been much coordination amongst jurisdictions to-date, the advantage of allowing differing approaches early on is that there will be “testing grounds” in different jurisdictions that are hopefully well suited to local conditions and allow for comparisons and evaluations of the different trials. It may not be necessary (or possible) to recreate all trial phases in every state and territory.
Options The NTC is seeking feedback on how governments should support on-road trials of automated vehicles. Four options are detailed below:
• Option 1: continue current approach – rely on exemptions, granted on a case-by-case basis, or
• Option 2: Option 1, plus introduce national guidelines to support a consistent approach to on-road trials; or
• Option 3: Option 1, plus support industry development of a code of practice to undertake on-road trials; or
• Option 4: development of uniform legislation to support on-road trials, applied in state and territory road safety laws.
We also welcome feedback on alternative options or an approach that incorporates elements of the options discussed here.
Option 1: Continue to rely on exemptions, granted on a case-by-case basis
Adopting Option 1, current exemption frameworks in the law would continue to be used to support on-road trials, used with appropriate conditions to ensure public safety. The Australian Government has responsibility for the ADRs and states and territories have responsibility
NEA
R-T
ERM
R
EFOR
M

41Discussion paper
for in-service standards, road safety and traffic laws. Consequently, there are two areas of exemption: Australian Government exemptions for non-standard vehicles and state and territory exemptions to operate a vehicle on a public road.
Each jurisdiction could therefore exempt applicants from ADR or road rules compliance and develop their own specific conditions or criteria for applicants to meet. These conditions would not necessarily be published and exemption processes could vary across jurisdictions.
Benefits of the current approach:
• does not require legislative amendments
• does not require inter-government or industry co-ordination
• exemption criteria can be specialised in each jurisdiction
• exemption mechanisms are already in place.
Disadvantages of the current approach:
• different trial conditions and processes could inhibit a nationally-consistent approach, which is likely to add costs for applicants, slow down the application process and potentially result in non-comparable data across trials and studies
• exemptions relating to specific legislative regimes and jurisdictions do not have a mechanism to provide a blanket exemption from all laws in their jurisdiction.
Option 2: rely on exemptions and support development of a Code of Practice to undertake on-road trials
Adopting Option 2, current exemption powers would be supplemented by a Code of Practice drafted and agreed by manufacturers, road managers and researchers. A code would not require any amendments to legislation and would address many of the consistency issues in a timely manner.
Like Option 3, discussed below, a code could have regard to trial conditions, such as driver training requirements, data sharing and insurance. Broader concepts could also be included, such as research protocols, including the common use of automated vehicle taxonomies.
Benefits of a Code of Practice to support trials:
• greater involvement from industry in the development of criteria, thereby encouraging strong collaboration between governments, manufacturers and researchers
• supports national consistency.
Disadvantages of a Code of Practice to support trials:
• not as flexible as guidelines
• achieving agreement across industry and government stakeholders could be challenging
• compliance is voluntary, unless referenced by an agreement (or an exemption approval).
Option 3: rely on exemptions and introduce national guidelines to support on-road trials
Adopting Option 3, current exemption powers would be supplemented by national guidelines agreed by road transport agencies, and developed in close consultation with industry, researchers and local councils. To realise their maximum value, national guidelines should be published. Option 3 would not require any amendments to legislation and would address many of the consistency issues in a timely manner.
NEA
R-T
ERM
R
EFOR
M
NEA
R-T
ERM
R
EFOR
M

42Regulatory options for automated vehicles
National guidelines could standardise trial conditions. Based on a comparative study of guidelines released in New Zealand and the United Kingdom, these conditions, or criteria, could relate to a wide range of matters, including (but not limited to):
• pre-trial testing
• compliance with road rules
• accountability for safety
• driver training
• incident reporting
• protection and sharing of data with defined parties
• insurance
• community engagement.
Austroads is currently investigating the emerging requirements for road infrastructure, vehicle registration and driver licensing to support automated vehicle trials and deployments. These projects are due to be finalised in 2016 and would be a key input into future guidelines.
National guidelines could also relate to application processes, ensuring that application timeframes, costs and administrative procedures are harmonised across road transport agencies. National guidelines would be most advantageous if they could underpin mutual recognition between states and territories and include a consistent approach to roadside enforcement.
Benefits of national guidelines to support trials:
• guidelines are more flexible than regulation, and trial conditions can be adapted over time
• guidelines that are published increase the public profile of automated vehicles and transparency in government
• guidelines can support a nationally-consistent approach, which is likely to reduce costs for applicants, streamline the application process and encourage comparable data across trials and studies.
Disadvantages of national guidelines to support trials:
• requires close cooperation with all jurisdictions seeking to support on-road trials – agreeing to common criteria while potentially taking into consideration special needs in specific jurisdictions
• enforcement agency interpretation of the guidelines may result in inconsistent outcomes
• unless they are a condition of an exemption approval, guidelines cannot be enforced.
Option 4: the development of consistent legislation to support on-road trials, applied in state and territory road safety laws
Adopting Option 4, jurisdictions legislate on-road trials specifically for automated vehicles. The legislation would likely include trial conditions; otherwise it could merely duplicate current broad-based exemption powers in legislation.
Australia is a federation of states and territories, and the Australian Government does not have the constitutional power to legislate the use of motor vehicles on public roads. Therefore, each participating state and territory would be required to separately legislate the same law. Historically, this has been achieved by the development of national model law which is subsequently applied in each jurisdiction. The Australian Road Rules is an example of model
NEA
R-T
ERM
R
EFOR
M

43Discussion paper
law, which is developed by the NTC in consultation with participating jurisdictions, but only takes effect when adopted into the law of a state and territory.
One of the drawbacks of model law is that states and territories may vary the rules. Although sometimes quite minor, these variations are not uncommon. An alternative approach is applied law, where a host jurisdiction would legislate automated vehicle trials and participating jurisdictions would either replicate the legislation or reference the legislation directly. An example of applied law is the Heavy Vehicle National Law (HVNL), although variations to applied law (known as derogations) can also occur.
South Australia has already introduced specific legislation to facilitate on-road automated vehicle trials and demonstrations. The Motor Vehicles (Trials of Automotive Technologies) Amendment Act 2016 (SA) was passed by the South Australian Legislative Council in March 2016. The Act amends the Motor Vehicles Act 1959 (SA). It provides that for a purpose related to an authorised trial of “automotive technology” the Minister has the power to exempt a person or class of persons, or a vehicle or class of vehicles, from the operation of a provision or provisions of the Motor Vehicles Act or any other Act, law or standard (section 134E). The Minister may, by notice in the Gazette, publish or adopt guidelines in connection with the operation of authorised trials.
The aim of the Act is to balance the interests of trial participants with road safety. This is achieved in part by requiring all proposals to have risk management plans and third-party and public liability insurance. There is also an indemnity provision protecting those exercising official powers or functions in good faith and measures to protect commercially sensitive information. The Act also contains measures to ensure the general public are kept aware of any trial taking place, including the location and period of the trial.
The Motor Vehicles (Trials of Automotive Technologies) Amendment Act 2016 could be adopted as a model for other jurisdictions. By allowing the publication of guidelines as part of the trial, the South Australian legislation also provides a framework to adopt nationally-consistent trial guidelines.
Benefits of legislating trials:
• greater level of certainty
• likely to increase the public profile of automated vehicles and increase community awareness and confidence in on-road trials
• nationally-agreed legislation consistent across jurisdictions is likely to reduce costs for applicants, streamline the application process and encourage comparable data across trials and studies.
Disadvantages of legislating trials:
• hardwires trial conditions in legislation and is the least flexible approach
• nationally-agreed legislation is complex and takes longer to implement than other options
• there may be a time lag between jurisdictions referencing, applying or implementing the legislation
• there may be variations between jurisdictions.
NEA
R-T
ERM
R
EFOR
M
NEA
R-T
ERM
R
EFOR
M

44Regulatory options for automated vehicles
Conclusion Based on stakeholder feedback it is clear that on-road trials of automated vehicles in Australia would benefit from national consistency. The most flexible means to achieve national consistency may be for state and territory governments to agree national guidelines. For those jurisdictions that have a legislative framework for trialling automated vehicles, national guidelines could be used to set conditions within that legislative framework.
For these reasons, the NTC supports Option 3 - continue to rely on exemptions, granted on a case-by-case basis, and governments collaborate with industry to introduce national guidelines to support a consistent approach to on-road trials.
Question 1a: Do you agree that automated vehicle trials should be supported with national guidelines? If not, why?
Question 1b: What key conditions should be included in any national guidelines?
NEA
R-T
ERM
R
EFOR
M

45Discussion paper
The changing meaning of control and proper control
Introduction Our road transport laws are based on the principle that the driver is in control of the vehicle. This approach is underpinned by the road rules, international convention and common law, and ensures that the driver is responsible for the actions of the vehicle.
In Chapter 7 we discuss how the concept of driver is being challenged by automated vehicles, and that it may be appropriate to expand the definition of driver to include the automated driving system and automated driving system entity.
In this chapter, we consider the complexities of what is meant by control. Adopting the SAE International Standard J3016 for Automated Driving, control of a highly or fully automated vehicle is likely to be clear: by definition, the automated driving system is in control of the vehicle for defined periods of time, or all the time. Likewise, control of a partially automated vehicle is likely to be clear: the automated functions are drivers’ aids and the human driver remains in control of the vehicle.
The nature of control in vehicle with conditional automation is unresolved. The key issue to be determined is this:
Figure 3 provides an overview of how the concept of control changes from the driver to the automated driving system entity in automated vehicles and thereby challenges the current regulatory framework.
Key points
• The legal concept of control is being challenged by vehicles that are conditionally automated and do not require a human driver to monitor the driving environment, but to monitor the automated driving system and to be the fallback for the dynamic driving task.
• Proper control is currently interpreted as having at least one hand on the steering wheel. This is likely to become outdated given the changing nature of control.
• The NTC supports the development of national enforcement guidelines to clarify a policy position on the meaning of control and proper control for automated vehicles.
Should monitoring the automated driving system and intervening if requested constitute legal control of the vehicle?
5 MEDIUM-TERM REFORM
LONGER-TERM REFORM
CLARIFY THEN REFINE
NEAR-TERM REFORM
NEA
R-T
ERM
R
EFOR
M

46Regulatory options for automated vehicles
Figure 3: Control of the vehicle based on the level of automation
What level of automation is the vehicle capable of?
Partial
Manual, with driver assistance
Human driver is in control
Conditional
Manual Automated
Automated but human monitoring
the system
Human driver is in control?
Human driver is in control?
High
What mode is the vehicle
operating in?
Full
Automated with human not in
the loop
Automated driving system entity is in control
Automated driving system entity is in control
NEA
R-T
ERM
R
EFOR
M

47Discussion paper
Road safety and traffic legislation in Australia does not currently address this issue, although in some jurisdictions a person is ‘taken to be in charge of a motor vehicle’ if the person is attempting to start or drive the vehicle.7
While some jurisdictions may have broad concepts of a person being in charge of a vehicle, the issue of control is less clear if the human driver is only required to monitor the automated driving system, and “be in the loop,” only some of the time. If the human driver is not fully in the loop and so engaged in monitoring the automated driving system, it is less certain that they are fully in control of the vehicle.
Resolving the issue of legal control will be critical to the introduction of vehicles that are conditionally automated, because if a human driver is still in control of the automated vehicle he or she is driving, then they are responsible for ensuring the vehicle operates safely and in compliance with the road rules and they must be qualified to drive the vehicle and be capable of doing so.
If there is broad agreement that legal control of a vehicle that has conditionally automation can be shared between a human driver and an automated driving system, this could also create regulatory challenges. For example, current legislation providing that a person is in charge of the vehicle by attempting to start or drive the vehicle does not take automated vehicles into consideration, or consider that control of a vehicle may be shared.
The road rules also require the driver to have proper control of the vehicle. In conventional vehicles, this can be clearly understood as the driver sitting in the driver’s seat with at least one hand on the steering wheel, and this is how enforcement agencies currently interpret proper control. However, if there is agreement that the human driver is legally in control of a conditionally automated vehicle, what does proper control mean when the human is monitoring the automated driving system and intervening if required?
In summary there are two key issues related to control of vehicles that are conditionally automated:
• am I in control of an automated vehicle if I must monitor the system and take over if required?
• if I am in control, how do I exercise proper control and how do I demonstrate proper control to an authorised officer?
Issues What constitutes control of the vehicle?
As noted earlier, many elements of road transport regulation are based on the principle that the driver is in control of the vehicle. This principle is derived from the 1968 Vienna Convention on Road Traffic and reflected in the Australian Road Rules, and state and territory traffic laws.
The Australian Road Rules defines the term drive to include be in control of. Control is not defined. Similarly, Rule 297 provides that a driver must not drive a vehicle unless the driver has proper control. Although no guidance is provided on the circumstances to be met for proper control, the use of the terms driver, drive and control indicate a relationship based upon a human driving and controlling the vehicle. This relationship is reinforced by Rule 348 that states a reference to a driver doing or not doing something is a reference to the driver causing the driver’s vehicle to do or not to do the thing. This directly connects the vehicle’s movements to the actions of the human driver.
7 For example, see section 3AA of the Road Safety Act 1986 (Vic).
NEA
R-T
ERM
R
EFOR
M
NEA
R-T
ERM
R
EFOR
M

48Regulatory options for automated vehicles
This conceptual link between the driver and control of the vehicle in the Australian Road Rules has been adopted in all states and territories and the HVNL. States and territories have either defined driver to include being in control of the vehicle, or to be in control of the steering, movement or propulsion of the vehicle. However, apart from Western Australia, road transport laws do not place any definitions or parameters around the concept of control that could constitute a barrier to more highly automated vehicles.
Western Australia provides the exception, and an illustration of a prescriptive approach to defining control. Section 263 of the Road Traffic Code 2000 (WA) provides that the driver must be behind the steering wheel and have full control over the vehicle:
263. Drivers to have uninterrupted and undistracted views etc.
(1) A person shall not drive a vehicle, unless —
(a) he or she is in such a position behind the steering wheel that he or she has full control over the vehicle; and
(b) he or she can obtain a full and uninterrupted view of the road and any traffic ahead and on each side of him or her; and
(c) he or she can obtain, in a rear-vision mirror or mirrors attached to the vehicle, a clear reflected view of every overtaking vehicle.
There is also a significant body of judicial interpretation of the concept of driving and control. The Victorian decision of Tink v Francis [1983] 2 VR 17 considered the matter of who has responsibility for the primary controls of the vehicle, and established that the term drive should include the notion involving some control of the propulsive force which will cause the vehicle to move. The concept of driving was also summarised in Damasoliotis v TAC [1998] VCAT 289 as comprising control over at least three elements of the motor vehicle, being steering, braking and propulsion (which could include ignition, gear selection and acceleration).
The case could be made that a human driver remains in control of the vehicle if he or she has responsibility for monitoring the system that performs the driving task, and has responsibility for intervening if something goes wrong. This could be to avoid a risk of collision that the automated driving system has not identified, or because the sensors have failed due to inclement weather, to give two examples. On the other hand, the case could be made that the human driver is not responsible for the physical movement of the vehicle and the automated driving system is undertaking the driving task, in which case the automated driving system entity would have legal control.
NEA
R-T
ERM
R
EFOR
M
49Discussion paper
The box below illustrates the complexity of determining control in a vehicle that is conditionally automated.
Who or what controls the vehicle?
Ken drives a vehicle that has a conditionally automated function. When the vehicle is on “automated mode” Ken is not driving the vehicle and his responsibilities are clearly outlined in the driver’s manual: ‘the driver must monitor the vehicle system to ensure that it is operating correctly and respond to a request to intervene.’
Ken has instigated the automated mode and the vehicle is operating in the traffic. Because he is only required to monitor the system, Ken is not looking out the window and watching what is happening on the roads. The vehicle fails to stop at a traffic light.
Who or what was in control of the vehicle at the time of the offence?
� Ken might argue that he wasn’t in control of the vehicle because he wasn’t even required to observe that there was a stop sign. He is not operating the vehicle.
� The manufacturer might argue that Ken has ultimate responsibility for the vehicle because he must monitor the system and be the fallback for the dynamic driving task.
·
How does a human driver exercise proper control in an automated vehicle?
Australian laws have a performance-based requirement that a driver exercises proper control of his or her vehicle. This legal requirement generates new challenges for potentially all types of automated vehicles, but particularly for those automated vehicles where the human driver is still in control all the time or some of the time. What does exercising proper control mean in the context of monitoring a vehicle’s performance? It could relate to concepts of monitoring vigilance and maintaining alertness. If a human driver is relied upon to take over at short notice in potentially any scenario on the road, then proper control could relate to being fully alert, being ready to take over from the automated driving system, being trained in monitoring, and being in the driver’s seat. These concepts will likely be more important than having at least one hand on the steering wheel.
However, proper control could also be defined in the negative – what a driver in an automated vehicle cannot do. For example, a requirement not to be fatigued while monitoring the automated driving system. The difficulty is that what constitutes proper control could depend on the human-machine interface, which could change significantly across vehicle types and use cases.
The concept of proper control will also be challenged by vehicles that are highly automated some of the time. It remains to be seen what level of engagement would be required of human drivers if the vehicle can come to a controlled stop without human intervention. For example, if a human is not a driver while the vehicle is in highly automated mode, but will be the driver and in control later in the journey, should the human’s behaviour be regulated according to the definition of the proper control road rule? If so, how are the requirements for proper control to be interpreted for drivers in highly automated vehicles?
NEA
R-T
ERM
R
EFOR
M
NEA
R-T
ERM
R
EFOR
M

50Regulatory options for automated vehicles
Secondly, how does a driver of an automated vehicle demonstrate to an authorised officer that proper control is being exercised? If the requirements of proper control are unclear, an authorised officer at a roadside enforcement intercept may not have the evidence to determine whether the driver had committed an offence. In a similar way to how driver distraction is identified today, police could rely on visual signs of drowsiness, including sleeping and yawning, or visual signs of inattention, such as reading.
Clear guidance would help clarify what constitutes proper control. This will largely depend on how safe automated vehicles are, and the extent to which human monitoring of the system is required for the vehicle to operate safely. This could then influence the direction of legislation and enforcement guidelines. For example, the requirement not to handle a mobile phone while driving may be outdated in a conditionally automated vehicle if a safety assessment of the human-machine interface in a vehicle determines that the level of monitoring can be undertaken safely while the human driver handles a mobile phone.
The human requirements of monitoring a vehicle with conditional automation are likely to settle over time, and could be subject to international standards. However, it is likely that initially there will be a range of conditionally automated driving functions available on the market, and the rule set for what constitutes proper control could vary depending on the technology and human-machine interface adopted by different manufacturers.
The risk is that the benefits of vehicles that are conditionally automated will not be attained because the rules are not clarified. But an even greater risk is that changes to the meaning and interpretation of proper control would allow drivers to undertake activities, such as handling a mobile phone, that are unsafe in the specific vehicle that they are driving.
» Chapter 8 discusses the complexities of determining who was in control of a highly automated vehicle when the responsibility for the driving task shifts between the human driver and the automated driving system.
» Issues relating to driver licensing requirements for different applications of automated driving are currently being investigated by Austroads.
Feedback from the issues paper Submissions to the issues paper broadly supported the concept that a driver monitoring the vehicle and intervening if requested should legally constitute control of the vehicle.
• Queensland TMR stated that there may be benefit in clarifying that a driver who is monitoring the automated driving system is still maintaining proper control of the vehicle. Conversely, further work is required to ensure that passengers of fully automated vehicle are not deemed to be driving, in control or in charge of the vehicle.
• NSW Government stated that consideration was required on appropriate mechanisms to control driver fitness and behaviour and that this level of fitness and behaviour would be dependent on the extent to which human intervention was required during the driving task.
• State Growth Tasmania raised concerns regarding the need for a person to be physically and mentally fit in the event that they had to take control of the vehicle and whether a link between license holders and the ability to control or monitor a vehicle was required. This issue was also raised by NSW Police, who proposed that further consideration be given to ensuring that drivers are capable of taking control when required.
• NZ Ministry of Transport suggested that further consideration on any amendments was required to ensure that regulators could determine at what time control passes from the driver to the vehicle.
NEA
R-T
ERM
R
EFOR
M

51Discussion paper
• Law Institute of Victoria noted that clarifying whether a driver with monitoring and intervention responsibilities is in control of the vehicle could significantly clarify responsibility from a liability perspective.
• Insurance Council of Australia considered that proper control should be defined to include monitoring and intervention to allow for the use and operation of automated vehicles which do not require the driver to physically drive the vehicle. It supported changes to the road rules to clarify that monitoring and intervention tasks could constitute proper control of a vehicle.
• Truck Industry Council suggested that any legislative amendments should clearly define both the human and automated control of a vehicle.
OptionsThe NTC is seeking feedback on how the legal concepts of control and proper control could be better clarified to accommodate automated vehicles. Three options are detailed below:
• Option 1: continue current approach – industry develops its position on the meaning of control and proper control and the concept is tested in the courts, or
• Option 2: that governments develop national enforcement guidelines to clarify a policy position on the meaning of control and proper control for automated vehicles, or
• Option 3: that governments amend the Australian Road Rules and state and territory traffic laws to clarify the meaning of control and proper control for automated vehicles.
We also welcome feedback on alternative options or an approach that incorporates elements of the options discussed here.
Option 1: continue current approach – industry develops its position on the meaning of control and proper control and the concept is tested in the courts
Adopting Option 1, automated vehicle manufacturers would determine what they consider constitutes control and proper control of an automated vehicle. Over time and as regulatory action in the courts is taken involving automated vehicles, the meaning of control would be refined and clarified.
This approach recognises that the legal definition of proper control should be determined in accordance with the safety risk of drivers not having at least one hand on the steering wheel, and recognises that this risk will be dependent on the technology and the future development of human-machine interfaces. It recognises that it could be too soon for governments to determine what constitutes proper control of vehicles with conditional automation until these human machine interfaces are developed.
Benefits of the current approach:
• supports industry innovation and allows for systems interfaces to develop without pre-empting laws or rules determining what proper control should look like
• allows for concepts of control and proper control to align with the development of international conventions or industry standards.
Disadvantages of the current approach:
• there may be a substantial period of time between the introduction of vehicles that are conditionally automated and legal clarification of the meaning of control. This could significantly impact consumer certainty and reduce the uptake of automated vehicles
• does not provide clarity to authorised officers, or provide for effective enforcement of the road rules
• reliance on litigation could be costly, problematically retrospective and determined on a case-by-case basis.
NEA
R-T
ERM
R
EFOR
M
NEA
R-T
ERM
R
EFOR
M

52Regulatory options for automated vehicles
Option 2: that governments develop national enforcement guidelines that clarify a policy position on the meaning of control and proper control for automated vehicles
Adopting Option 2, state and territory governments would take a pro-active role to address issues of control and proper control by developing enforcement guidelines that take a position on the issue. To realise the optimum benefits of this approach, national guidelines could be endorsed by the Transport and Infrastructure Council and published.
Adopting this approach, the definition of proper control could also capture higher levels of automation and clarify that the human driver of a highly or fully automated vehicle is not the driver in a legal sense and is therefore not subject to the same requirements of control and proper control.
An alternative approach to Option 2 may be to develop national enforcement guidelines that define control and address the issue of whether monitoring and intervention tasks constitute control. However, these guidelines would not include guidance related to the interpretation of proper control until human-machine interface technology develops and the safety risk of undertaking non-monitoring activities in vehicles with conditional automation are comprehensively evaluated.
Benefits of national enforcement guidelines:
• provides greater certainty for manufacturers, technology developers and consumers about whether the human driver is still in control in a with conditional automation vehicle
• provides clarification to authorised officers when conducting enforcement actions involving vehicles with conditional automation.
Disadvantages of national enforcement guidelines:
• it may be too soon to reach national agreement on the interpretation of proper control when the human machine interface and the mental requirements of a human driver to monitor the automated driving system are still being developed
• enforcement guidelines do not have any legal force, which may create some ambiguity for manufactures and consumers.
Option 3: that governments amend the Australian Road Rules and state and territory traffic laws to clarify the meaning of control and proper control for automated vehicles
Adopting Option 3, the Transport and Infrastructure Council would agree to amend the Australian Road Rules and state and territory traffic laws to clarify the meaning of control and proper control in relation to automated vehicles. This amendment would then be adopted in road transport legislation and the HVNL.
UN WP.29 and WP.1 are both working on the issue of defining automated driving, and the Commonwealth Department of Infrastructure and Regional Development participates in those working parties. It will therefore be important that the road rules should be aligned with the outcomes of these international working parties wherever possible.
Like Option 2, the amendments could also have regard to the application of control and proper control in highly and fully automated vehicles.
We noted above that proper control is a performance-based regulation. This means that the elements of the offence to be established must be that the vehicle was not properly controlled, that is, that the vehicle went somewhere, hit something, or went too fast, contrary to the wishes of the driver. The law does not prescribe how a driver must maintain proper control – performance-based regulations are therefore difficult to enforce without evidence of the vehicle performing in a way that the regulation does not allow it to perform. This creates
NEA
R-T
ERM
R
EFOR
M

53Discussion paper
challenges around clarifying the meaning of proper control in legislation without introducing prescription that could limit the effectiveness of the law.
Therefore, an alternative approach to Option 3 may be to amend legislation to clarify whether monitoring and intervention tasks constitute control, but provide guidance about the application of proper control to automated vehicles in national enforcement guidelines.
Benefits of amending the road rules to clarify control:
• provides the greatest level of certainty to manufacturers, technology developers and consumers about a human driver’s legal obligations and responsibilities when driving in a vehicle with conditional automation
• provides clarification to authorised officers when conducting enforcement actions involving automated vehicles.
Disadvantages of amending road rules to clarify control:
• limits the scope of what could, in operational practice, constitute control for automated vehicles
• would not provide flexibility to cope with technological advances or changes in the use of automated vehicles
• would be addressing issues of control prior to the development of any international conventions or industry standards
• the current definition of proper control is principle-based, and any amendments to the definition to specifically apply to automated vehicles could be unavoidably prescriptive and better placed in national guidelines
• whether monitoring and intervention tasks constitutes control is a legal interpretation question that could be decided by the courts.
Conclusion It is clear from the stakeholder feedback that clarifying what constitutes control and proper control are priority issues. Given that the issues with concepts of control and proper control relate to the interpretation of legislation, rather than the legislation itself, the NTC supports Option 2 – that national enforcement guidelines are developed by governments that clarify a policy position on the meaning of control and proper control for automated vehicles.
National enforcement guidelines could be adapted over time as the technology develops. The road rules could be adapted over time when there is more certainty.
Question 2a: Do you agree that issues of control and proper control should be addressed through national enforcement guidelines? If not, why?
Question 2b: How should control and proper control be defined?
NEA
R-T
ERM
R
EFOR
M
NEA
R-T
ERM
R
EFOR
M

54Regulatory options for automated vehicles
Safety assurance for vehicles that do not require a human driver
Introduction The role of governments in the deployment of automated vehicles is a key issue for the community to consider. Should the evidence indicate that automated vehicles offer significant safety, mobility, productivity and environmental net benefits, a case exists that governments should at a minimum ensure that current laws are not a barrier to their uptake.
If the current regulatory barriers are removed, automated vehicles can be regulated by ADRs, in-service vehicle standards, registration and road rules within the current regulatory framework. Industry is also incentivised to provide safe products through consumer law and product liability.
However, current driver licensing requirements will not apply to automated vehicles that do not have a human driver. At issue is whether, in the absence of a driver licensing regime, a safety assurance framework is needed to ensure the safe operation of automated vehicles. A safety assurance framework could take the form of an automated vehicle licensing, registration or accreditation regime.
Different regulatory approaches
Some regulation may be necessary given that the safety performance of automated vehicles remains to be tested and there is a wide range of use cases and deployment models that carry with them different safety risks. For example, a recent Rand report calculated that it would take 275 million miles of on-road driving to have 95 per cent confidence that the failure rate of an automated vehicle is equal to approximately one fatality per 100 million miles (Kalra 2016 p. 10). The report concludes that:
Key points
• Government regulation should only be considered where a problem is high risk and significant, where the community requires the certainty provided by legal sanctions, or when universal application is necessary. Government regulation must be responsive and proportionate.
• Like other vehicles, automated vehicles will be subject to vehicle standards and road rules. However, driver licencing requirements will not apply to automated vehicles that do not have a human driver. If the legal barriers are removed, governments may seek regulatory oversight of automated vehicles to ensure they operate safely on the road network.
• The NTC supports the development of a national safety assurance framework to oversee deployment of automated vehicles that do not require a human driver.
6 NEAR-TERM REFORM
MEDIUM-TERM REFORM
LONGER-TERM REFORM
CLARIFY THEN REFINE

55Discussion paper
The technology will evolve rapidly, as will the social and economic context in which it is being introduced. In fast-changing contexts such as these… in parallel to creating new testing methods, it is imperative to begin developing approaches for planned adaptive regulation (Kalra 2016 p. 10).
Consider what would happen if vehicle standards and road rules were amended to support the safe deployment of highly automated passenger carrier pods, designed for low-speed areas such as airport precincts. Once the legal barriers have been removed, what limitations or safeguards are there to prevent this vehicle from operating on a high-speed road at a potentially high risk to other road users?
It should also be noted that once the legal barriers are removed, full-scale commercial deployment of automated vehicles are possible without manufacturers having to comply with any on-road trial conditions or rules.
There are currently two safety gateways for governments, applying to the vehicle and the driver. If the human driver is replaced by an automated driving system, there is the question of what sort of gateway is needed.
Figure 4 illustrates that today, in vehicles where a driver is in control, that driver is regulated through a driver licensing regime. But if the driver is an automated driving system, how is the driver then regulated? Is regulation necessary?
The risk is that removing the barriers without additional oversight could result in automated vehicles operating unsafely, for example, at inappropriate speeds or with insufficient occupant protection.
Figure 4: How automated vehicles are challenging the current regulation of drivers
Vehicle Certification Vehicle Registation Level of Automation “Driver” Licensing
Compliance plate fitted to vehicle
if it complies with Australian
Design Rules (ADRs)
Vehicle is registered based on vehicle class
(eg. light vehicle, heavy vehicle)
Human Driver licensed to
operate, based on vehicle class
Full automation (level 5)
Partial (level 2)
Conditional (level 3)
Automated driving system, entity
licensed to operate the vehicle?
High automation (level 4)
The role of government and the vehicle testing of automated vehicles illustrates the complexities of the issue. In California, all automated vehicles being tested on public roads need to be accredited under law by an independent third-party. This is intended to provide the road agency with certainty that the tested vehicles can operate safely on the road network. A similar requirement could be introduced in Australia. However, to some extent this could depend on whether other countries with a manufacturing sector adopt such a rigorous testing regime. The need for government oversight of vehicle testing could also depend on whether international manufacturers signal to governments in Australia that they would test automated vehicles on Australian roads before introducing them here. If they do, this may alleviate the need for government oversight of automated vehicle testing.
MED
IUM
-TER
M
REFO
RM

56Regulatory options for automated vehicles
Additional oversight does not necessarily have to manifest itself in explicit regulation. The options analysed in this discussion paper canvas a range of different safeguards, including the development of industry codes and guidelines. The Australian Government Best Practices Regulation Handbook (2010) provides a range of regulatory options:
Self-regulation: characterised by industry-formulated rules and codes of conduct, with industry responsible for compliance. This is a feasible option when there is no strong public interest concern (particularly no major public health and safety concerns), when the problem is a low-risk event, of low impact or significance, and the problem can be fixed by the market itself. However, self-regulation may be less effective if industry has an incentive not to comply with the rules.
Quasi-regulation: where governments influence businesses to comply, but without explicit government regulations. These include industry codes of practice developed with government involvement, guidance notes or industry-government agreements.
Co-regulation: where industry develops and administers its own arrangements, but government provides legislative backing to enable the enforcement of the arrangements. Legislation may also provide for government-imposed rules if that industry does not meet its own responsibilities. This is the current approach adopted in the rail industry.
Explicit government regulation: characterised by direct regulation comprised of primary and subordinate legislation. Explicit government regulations should be considered where:
• the problem is high risk, of high impact or significance (e.g. a major safety issue)
• the community requires the certainty provided by legal sanctions
• universal application is required or judged necessary
• there is a systemic compliance problem with a history of intractable disputes.
The courts will also apply existing legislation and common law principles on a case-by-case basis.
Issues As discussed in Chapter 1, vehicle manufacturers are progressively introducing increasing levels of automated driving controls in their vehicles. At the same time, industry and consumers are seeking certainty from governments that automated vehicles can operate safely and legally in Australia.
A number of existing laws in Australia, including road rules and vehicle standards laws, are barriers to more automated road vehicles, and this discussion paper addresses these barriers. However, the immediate removal of current legal barriers – without additional regulatory oversight – would enable any automated vehicles to operate without road transport agencies being satisfied that these vehicles can operate safely against any risk assessment or criteria.
There are additional complexities to consider:
• the technology supporting automated vehicles is variable in terms of maturity and in many cases is still being developed, tested and trialled
• the direction of vehicle standards and road rules at an international level is also still evolving
MED
IUM
-TER
M
REFO
RM

57Discussion paper
• it is not clear whether a vehicle tested in a manufacturer’s country of origin will operate as safely on Australian roads, given that we have different road markings and road signs that may impact some vehicles’ ability to accurately interpret the road environment.
A key question is whether additional road agency oversight is desirable to manage the safe deployment of automated vehicles.
Do governments need to assure the safety of automated vehicles or should industry self-regulate, underpinned by consumer laws and product liability?
Automated vehicles could in some ways be similar to how heavy vehicles are regulated today – both have potential higher risks or impacts than conventional light vehicles. Based on a risk assessment, governments today regulate where some heavy vehicles can operate on the network and can place conditions on heavy vehicle operators and drivers.
Clearly defined regulatory objectives
When thinking about safety assurance options for government, it is useful to clearly define our regulatory objectives and to reassess our response over time against these objectives as clear technology paths emerge. The NTC has developed the following draft objectives for discussion purposes:
1. Removing unnecessary legal barriers that prevent automated vehicles from operating
2. Supporting the safe operation of automated vehicles
3. Supporting trials, niche deployments and implementation
4. Supporting different technology paths and levels of driving automation
5. Harnessing innovation
6. Providing legal certainty
7. Supporting consumer choice
8. Adopting nationally consistent standards, criteria, rules and processes
9. Aligning with international standards and conventions wherever possible
10. Aligning with national transport technology policies.
These draft objectives have been used to evaluate the benefits and disadvantages of options throughout this paper.
The first objective is clearly the responsibility of governments as custodians of the law. The remaining objectives do not necessarily require explicit government regulation to be achieved. For example, technology innovation could be impeded by greater regulatory oversight. On the other hand, regulation can arguably provide economic and societal certainty when the “rules of the game” are clearly defined.
An important consideration is the extent to which the community, reflected in the decision-making of government, industry and consumers, accepts any risks associated with automated vehicles. If the community’s risk appetite is low and it expects automated vehicles to be low risk, the case for regulatory oversight is strong. If the community is willing to accept a higher risk to attain overall benefits, the case for regulatory oversight is weak.
MED
IUM
-TER
M
REFO
RM

58Regulatory options for automated vehicles
Feedback from the issues paper There was broad agreement in the submissions that governments should not stifle innovation or unnecessarily interfere in the market. But many stakeholders still want governments to ensure automated vehicles operate safely.
• Queensland TMR suggested that the role of government will likely be similar to the existing roles, with harmonised vehicle regulations as much as possible. Governments could have specific roles; for example, to set data sharing requirements to ensure incident data is provided for crash investigation purposes. If governments are sceptical about the safety benefits of automated vehicles, a more risk adverse approach to regulation may be appropriate.
• NSW Government agreed that a balance should be achieved between promoting innovation and advancement, road network efficiency, and ensuring that safety standards are maintained.
• State Growth Tasmania stated that the regulatory role of government is to review existing regulation and to identify unnecessary regulatory barriers.
• Northern Territory Government stated that an evolving framework which utilises existing exemption and authorisation provisions may be the best way to manage emerging technology in the short term. Depending on the evolution of the issue, current laws could be amended in future to reflect the learnings from the development of the framework.
• WA Main Roads stated that the logical choice would be to utilise the existing exemption framework until the technology matures. Regulating for highly and fully automated vehicles at this point in time would be premature. During this period it would be logical to develop a framework of legislation for automated vehicles that sits alongside current legislation, in readiness for market take up. Overseas regulations that develop over time should be considered when developing Australian legislation.
• Victoria and NSW Police agreed with the development of a nationally-consistent regulatory framework to govern the use of automated vehicles.
• NZ Ministry of Transport stated that government’s role is to remove unnecessary barriers and at the same time ensure public safety. Explicit government regulation is likely to be required for the foreseeable future, if only to reassure the general public that the technologies being deployed are safe.
• Australian Automobile Association (AAA) recommended an approach similar to that adopted in California. The first stage would be to regulate automated vehicle trials on public roads, with manufacturers applying for licences which would require third-party accreditation. The second stage would involve deploying the technology with strict licencing and registration. The final stage would look at regulating the use of fully automated vehicles where a driver was not required to monitor the operation of the vehicle at any stage.
• FCAI and IAG emphasised national consistency and a flexible approach that does not stifle innovation and is harmonised with international standards. The FCAI recognised that some of the non-vehicle related regulations, standards, guidelines and codes (e.g. privacy) may need to be different in other countries due to the operating and legal environment within Australia.
• Toll Group stated that government’s role should be to facilitate the safe introduction of automated vehicles through enabling laws and policy. Government should articulate the broad safety, design and privacy standards required by the technology, but otherwise remain neutral.
• ATA noted that new rules may be needed for the inevitable interactions between automated entities and standard road vehicles.
MED
IUM
-TER
M
REFO
RM

59Discussion paper
• Dr Hussein Dia noted that regulators need to engage the public and create a testing and legal framework to verify compliance. The biggest challenge relates to what procedure can be used to verify compliance.
• George Institute recognised the challenge of developing a legislative framework that strikes a balance between being flexible enough to regulate the vehicle technology and mandating rigorous evaluation of safety and acceptability to all road users. Minimum safety performance standards are required, particularly in relation to the interaction between automated vehicles and vulnerable road users.
• Griffith Law School noted that the motor vehicle is currently subject to a high degree of explicit government regulation, not just regarding use of vehicles, but in the form of explicit statutory regimes for liability for personal injury. The authors suggested that there is nothing inherent in the current emergent stage of automated vehicles that suggests a need to retreat from this form of regulation.
• Motor Cycle Council NSW stated that legislation is required to ensure that sensors and systems used in automated vehicles are of a standard that is able to detect and respond to motorcycles to avoid crashes.
• ADVI proposed that governments need to provide a clear pathway for the technology whilst ensuring the community is both protected and reassured. Government could apply a co-regulatory approach through a safety management system as applied in the regulation of rail and aviation.
Options The NTC is seeking feedback on what the role of government should be. Two options are detailed below:
Option 1: governments amend the current regulatory framework by removing barriers for more highly automated vehicles to enter the market, and allow industry to self-regulate the safe operation of automated driving functions, or
Option 2: governments implement a national safety assurance framework to oversee the deployment of automated vehicles that do not require a human driver, in conjunction with removing legal barriers.
We also welcome feedback on alternative options or an approach that incorporates elements of both options.
While these options relate to the overall regulatory framework for automated vehicles, all subsequent options in this paper offer stakeholders a basic choice between explicit government regulation and variations of industry self-regulation or co-regulation.
Option 1: industry responsibility for safe automated vehicles within current regulations
Adopting Option 1, the existing regulation of motor vehicles would apply to automated vehicles, and government’s primary role would be to remove unnecessary regulatory barriers that prevent automated vehicles from being introduced and used on roads. Only minimal legislative changes would be required, to clarify who is in control of automated vehicles. Manufacturers, operators and service providers would be responsible for ensuring that automated vehicles operate safely within the current legal framework.
Existing product liability and consumer laws, as well as corporate social responsibility and commercial imperatives provide a framework within which manufacturers and operators are already incentivised to ensure the safe operation of automated vehicles.
Industry could be encouraged to develop a code of practice or national operational guidelines to aid consistent and safe testing and deployment of automated vehicles. Governments
MED
IUM
-TER
M
REFO
RM

60Regulatory options for automated vehicles
could support industry by facilitating the development of national operational guidelines, and clarifying registration and driver licensing and training requirements and processes.
Benefits of an industry approach:
• supports innovation
• decreased regulation
• automated vehicles introduced and operating within the existing regulatory framework
• low-cost option for taxpayers and potentially consumers.
Disadvantages of an industry approach:
• potentially inconsistent approaches adopted by different manufacturers, operators and service providers
• shared safety responsibilities may be unclear in a complex operating environment that has different entities responsible for different functions. For example, the manufacturer may be responsible for providing over-the-air software updates, and a service provider for maintaining the accurate calibration of vehicle sensors
• less certainty for consumers that injury or property damage caused by product failure will be quickly compensated at a reasonable cost
• assumes all industry stakeholders are willing to do the right thing
• removal of the legal barriers could enable manufacturers with widely divergent risk profiles and business practices to introduce automated vehicles in Australia
• some automated vehicles may need roads or infrastructure to meet specific requirements (such as facilitation of truck platooning or passenger carriers operating in low speed zones) that could require the approval or co-operation of the relevant road manager or asset owner.
Option 2: develop a national safety assurance framework to oversee deployment
Adopting Option 2, road transport agencies would implement a decision-making and approval process for deployment of automated vehicles in conjunction with the removal of legal barriers.
A safety assurance framework would only be warranted for those automated vehicles that may operate without a human driver being in control. In those vehicles, a human may not be able to intervene if the automated vehicle fails and because the identity of the legal entity responsible for the vehicle could otherwise be unclear.
Any safety assurance framework for automated vehicles is therefore possibly only going to apply to highly and fully automated vehicles. However, in the event that a human driver is not in control of a vehicle with conditional automation, then a safety assurance framework could also extend to those vehicles.
A safety assurance framework would allow road transport agencies to permit specific automated vehicles or automated vehicle functions to be sold and used in Australia based on nationally-agreed safety criteria. The safety assurance framework could operate though the introduction of automated vehicle registration, or the accreditation or licensing of the automated driving system entity.
To generate discussion, the following suggestions are provided.
Before a highly or fully automated function could be approved for sale or use in Australia, a legal entity (who might be the vehicle manufacturer, an automated driving system designer or after-market automated driving system installer) would:
• demonstrate that the functionality meets the criteria of the safety assurance framework
MED
IUM
-TER
M
REFO
RM

61Discussion paper
• agree to be registered as the “automated driving system entity” and to be legally responsible for the vehicle while it was under the control of the automated driving system
• show it/he/she has a presence in Australia and the financial capacity to satisfy any liabilities arising from legal actions.
Identifying an automated driving system entity would support Option 2 in Chapter 7, which proposes expanding the meaning of driver to include an automated driving system entity.
Figure 5 (on the next page) outlines possible principles and performance criteria against which automated vehicles could be measured. They are safety-related performance standards that include criteria for all automated vehicles and other criteria specific to levels of driving automation.
Safety principles and criteria for road transport agencies and private road operators may also be warranted for some automated vehicle use cases, such as heavy vehicle platooning.
This approach would require close collaboration with road safety groups, Austroads, road agencies, persons knowledgeable about human factors, vulnerable road user experts and automated vehicle specialists to ensure appropriate safety principles and associated criteria are matched to the relevant automated vehicle.
A single identifiable entity with a presence in Australia would assist authorised officers, prosecutors, insurers and legal defendants by reducing delays, removing uncertainty and avoiding arguments about which of possibly numerous parties involved in the production and design of the automated vehicle and its systems is responsible in the event of a crash or similar negative event.
A legislative basis for such a scheme would make the requirements enforceable and enable conditions to be placed on registration; allow the creation of an offence for breach of condition, with penalties; and could provide an alternative to applying the driver penalty for a breach of road traffic and safety laws.
Each element of the framework should be designed in collaboration with manufacturers, technology developers and safety specialists. Where possible, it should be aligned with international developments, taking into consideration Australian road and traffic conditions.
Should it be adopted nationally, this framework would ensure that decision-making in relation to the introduction of automated vehicles is consistent across all road transport agencies and that approved vehicles or functions can be mutually recognised across jurisdictions. This framework should also be sufficiently flexible to accommodate on-road trials and automated vehicle deployment.
This decision-making process has a number of features. It could cover:
• Market entry regulation, for which the Commonwealth Department of Infrastructure and Regional Development would take a lead role, ensuring automated vehicles that enter the market meet minimum safety requirements.
• In-service regulation, led by road transport agencies. This could include modified in-service compliance schemes for automated vehicles, such as roadworthy checks and approval for modifications.
• Determining minimum requirements and guidelines for roads and infrastructure, and a process to progressively adopt and ensure they are used consistently.
• If relevant, designate roads and infrastructure for on-road trials or to support specific automated vehicle functionality, such as automated heavy vehicle platooning.
MED
IUM
-TER
M
REFO
RM

62Regulatory options for automated vehicles
Figure 5: Examples of potential safety principles and criteria for automated vehicles
Potential safely principles – for all automated vehicles
1. Automated vehicles must comply with all relevant safely requirements before being allowed to operate on publicly-accessible roads or infrastructure.
2. Automated vehicles must only operate on roads and infrastructure consistent with their approved behavioural competencies.
Potential performance criteria – for all automated vehicles
1. The applicant has demonstrated that the vehicle is compliant with the ADRs applicable to it, or has a relevant ADR exemption.
2. The applicant has demonstrated that the vehicle can operate in compliance with relevant road safety and traffic laws.
3. The applicant has demonstrated that the maximum speed of the vehicle is based on a risk assessment that considers the applicable operational environment, occupant protection and vehicle mass.
4. The applicant has demonstrated that, for wherever the vehicle operates, the vehicle can safely manage:
• responding to temporary speed zones (such as roadworks)
• responding to traffic controls (such as stop signs, variable speed signs and traffic lights)
• all likely road conditions (such as unsealed roads)
• all likely environmental conditions (such as dust storms or flooding)
• interaction with trains and light rail (such as railway level crossings)
• interaction with vulnerable road users (such as compliance with one metre clearance for cyclists).
5. The vehicle has real-time monitoring of driving performance and incidents, including event data records in the lead up to any crash or near miss that identifies which party was in control of the vehicle at the relevant time.
6. The vehicle operates with functionality to provide road agencies with crash and near-miss data.
7. The vehicle operates with the minimum required standards of security, mapping, privacy and data management protocols.
8. The applicant has vehicle insurance valued at a specified amount that covers personal injury, third-party damage and damage to infrastructure, public liability and professional indemnity.
Additional criteria for automated vehicles that require human intervention or monitoring
1. The automated vehicle must meet any international standards or agreed guidelines for human machine interfaces, and allow, when relevant, human drivers to safely disengage and re-engage the driving task.
2. Human drivers are provided with appropriate training to safely disengage and re-engage the driving task.
Additional criteria for highly or fully automated vehicles
1. There is an identifiable entity that has legal responsibility for a highly or fully automated vehicle.
2. The automated vehicle must be capable of coming to a controlled stop without human intervention.
MED
IUM
-TER
M
REFO
RM

63Discussion paper
In the medium to longer term, driver-training conditions related to operating automated vehicles (particularly in relation to driver requirements to monitor and safely disengage and re-engage the driving task) could be reflected in driver licencing requirements rather than in criteria or standards expected of industry. This issue will be further considered in a current Austroads project assessing registration and licencing implications for automated vehicles.
As discussed in Chapter 9, new ADRs to support the safe operation of automated vehicles, such as standards in relation to cyber-security and communications protocols, are likely to be developed in alignment with the progress of international standards, particularly with UN WP.29. This will take time, and a safety assurance framework provides a mechanism for road agencies to be satisfied that these design aspects of automated vehicles have been adequately addressed by manufacturers in the transition period.
A safety assurance framework also provides a mechanism to ensure the consistent treatment of automated vehicles used as passenger transport vehicles, which have a wide range of different applications and service conditions across jurisdictions.
Benefits of a safety assurance framework:
• provides market and regulatory certainty
• provides policy-makers, regulators and consumers with a greater level of confidence that automated vehicles will operate safely
• enables governments to address higher risk use cases, issues relating to security, the human-machine interface and vulnerable road users
• supports a nationally consistent approach
• can be adapted as international standards and practices are established
Disadvantages of a safety assurance framework:
• increases responsibility on road transport agencies and others in government to ensure automated vehicles are operating safely
• could impact innovation or slow down deployment of automated vehicles
• could create additional complexity, cost and administrative burdens for industry.
Conclusion The optimum role of government is a key issue that will impact the decision-making of how to address the subsequent issues raised in this discussion paper.
The NTC recognises that there are significant benefits and disadvantages to both approaches discussed above, and a variation could be adopted that draws on elements of both. However, given the safety risks of different types of automated driving functions are unknown, at this point in time governments should oversee the introduction of automated vehicles that do not have a human driver in addition to current rules and regulations.
At this stage, the NTC supports Option 2 – that governments develop a national safety assurance framework to oversee deployment of highly and fully automated vehicles.
This approach should extend to vehicles with conditional automation if a human driver is not in control of a vehicle with conditional automation, or if warranted by any emerging safety risks from those vehicles.
Question 3a: Do you agree that governments should oversee the safe operation of automated vehicles though the development of a national safety assurance framework? If not, why?
Question 3b: What objectives and criteria should such a framework include?
MED
IUM
-TER
M
REFO
RM

64Regulatory options for automated vehicles
Key points
• A range of laws require a human driver. This is unlikely to be a barrier for automated vehicles that require a human driver to remain in control of the vehicle.
• In some highly and fully automated vehicles, there will not be a human driver some of the time or all of the time. Because they would not have a human driver, these vehicles could not currently operate without an exemption from the road rules and other laws.
• The definition of driver could be expanded to include an automated driving system.
• The NTC supports expanding the definition of driver in legislation.
The changing meaning of driver and driving
Introduction Driving in its most basic sense is focussed on route finding, route following, velocity control, collision avoidance, rule compliance and vehicle monitoring (ARRB submission, p.3, quoting Brown, 1986). With the emergence of automated vehicles, the vehicle monitoring function is likely to increase for human drivers, as the other functions transition to the automated driving system.
In addition to these driving functions, drivers have a range of other legal responsibilities, including responsibility for passengers to comply with laws (such as wearing seatbelts) and responsibility for the vehicle (such as mass, dimensions and loading).
As vehicles become more automated, the notion that the human driver is in control and therefore responsible for the vehicle is stretched to the point that, in highly and fully automated vehicles, it could be said that the driver is no longer the human occupant but in fact the automated driving system. This paradigm was not envisaged when the road rules, and other relevant laws, were drafted and the driver was clearly defined and understood to be human.
The 1968 Vienna Convention on Road Traffic requires a driver to be responsible for the vehicle. The Convention states “every moving vehicle or combination of vehicles shall have a driver” (Article 8.1) and the driver must be in control of the vehicle (Article 13).8 Likewise, the Australian Road Rules could not function without a legal person being responsible for the actions of the vehicle. In civil tort and criminal law there must also be a legal person responsible for the actions of the vehicle for any civil liability or criminal offence to be committed.
Under current laws, the driver is responsible for the vehicle, and the legislation is drafted on the basis that the driver is human. The human driver is an identifiable legal entity who can be held responsible for any accidents or breaches while he or she is, or should be, in control of the vehicle.
8 In March 2016, the Convention was updated to provide that vehicle systems which influence the way vehicles are driven shall comply with this provision. This would suggest that the human driver is still in control for partially or conditionally automated vehicles.
7 IMMEDIATE REFORM
LONGER-TERM REFORM
CLARIFY THEN REFINE
MEDIUM-TERM REFORM

65Discussion paper
The following legislative regimes are discussed in this chapter because their definition and use of the concept of driver are being challenged by emerging technologies that are able to shift driving responsibilities from the human driver to the automated driving system:
• Australian Road Rules and state and territory road safety and traffic legislation
• heavy vehicle law
• tolling legislation
• criminal law
• passenger transport legislation
• dangerous goods law
• accident compensation schemes.
Adopting SAE International Standard J3016, these laws are unlikely to have any barriers to automated vehicles that will continue to require a human driver to be responsible for the vehicle. The potential barrier relates to automated vehicles that will not require a human driver.
» The NTC has undertaken a comprehensive analysis of current legislation and identified a range of laws that assume a human driver. The annex to this discussion paper provides the complete analysis
» See Chapter 5 for a discussion on whether monitoring and intervention tasks constitute control.
» See Chapter 8 for a discussion on how governments and other parties identify who was responsible for a vehicle at a point in time.
Issues In 2015, Google Inc. wrote to NHTSA to seek its view on the interpretation of US motor vehicle regulations to automated vehicles that are controlled exclusively by what Google refers to as the self-driving system, or automated driving system.
In its response to Google Inc. (NHTSA 2016), NHTSA recognised the challenges of interpreting the concept of driver under the current US regulations:
We agree with Google its [self-driving vehicle] will not have a driver in the traditional sense that vehicles have had drivers during the last more than one hundred years… No human occupant of the [self-driving vehicle] could meet the definition of driver … given Google’s described motor vehicle design. Even if it were possible for a human occupant to determine the location of Google’s steering control system, and sit immediately behind it, that human occupant would not be capable of actually driving the vehicle as described by Google. If no human occupant of the vehicle can actually drive the vehicle, it is more reasonable to identify the driver as whatever (as opposed to whoever) is doing the driving [NHTSA 2016, p. 3].
Likewise, in Australian legislation the concept of driver means a human driver, and many laws could not function properly without a human driver. The NTC legislative audit identified 53 Acts and regulations that could be affected by highly and fully automated vehicles. Examples are provided below:
• in the Australian Road Rules
– the driver must not drive at a speed over the speed-limit applying to the driver for the relevant length of road where the driver is traversing
– the driver approaching or at traffic lights showing a red traffic light must stop the vehicle
MED
IUM
-TER
M
REFO
RM

66Regulatory options for automated vehicles
– the left and right sides of the vehicle are defined in relation to the person and the person’s perspective
– if the driver will be over three metres from the closest part of the vehicle, the driver must switch off the engine before leaving the vehicle
– mobile phone rules are only relevant for a human driver.
• in state and territory traffic laws
– a driver must stop and render assistance if involved in a crash
– a driver must report in person to a police station if a person is injured and no police are in attendance at the crash
– a person must not drive a motor vehicle at a speed or in a manner which is dangerous
– a person must not drive a motor vehicle without holding a driver licence or permit
– a driver must comply with directions of an authorised officer.
• in the Heavy Vehicle National Law
– a copy of a relevant document (including a permit, notice, exemption or accreditation) must be kept in the driver’s possession
– a person must not drive a heavy vehicle that does not comply with mass, dimension and load requirements
– directions by police or authorised officers to the driver of a heavy vehicle to stop the vehicle, etc. must be complied with
– fatigue laws would not be relevant.
• in tolling legislation
– a person who is the driver of a vehicle used in a toll zone is liable to pay the toll.
• in criminal law
– a person who drives a vehicle in a reckless, negligent, culpable or dangerous manner which causes death or serious injury is guilty of an offence
– a person who fails to stop and render assistance where death or serious injury has occurred is guilty of an offence.
• in passenger transport legislation9
– a driver must be accredited to drive the vehicle
– a driver must ensure that the number of passengers aboard the vehicle does not exceed the maximum number of passengers allowed on the vehicle
– the maximum number of people to be carried in the vehicle includes the driver
– a driver of a taxi-cab must not cause or allow the taxi-cab to stand in a taxi zone if the taxi-cab is hired or is not available for hire
– a driver of a taxi must choose the shortest practicable route to the place specified unless the hirer requests some other route
– a driver of a taxi-cab must give reasonable help to passengers to get them and their luggage or other items into and out of the taxi-cab
– a driver of a public passenger vehicle must at the conclusion of each shift carefully examine the vehicle for property that may have been left in the vehicle
– if a taxi is involved in an accident, the operator of the taxi service must submit a report which includes the name and identification number of the driver of the vehicle.
9 State and territory passenger transport legislation covers accreditation of public transport operators, drivers and other parties providing services via public buses on regular routes, other buses, taxis and private hire cars.
MED
IUM
-TER
M
REFO
RM

67Discussion paper
• in dangerous goods legislation10
– a person must not drive a road vehicle transporting dangerous goods in a container or tank if the person knows, or reasonably ought to know, that the container or tank is unsuitable for the transport of the goods
– a person must not drive a road vehicle transporting dangerous goods in a bulk container if the person knows, or reasonably ought to know, that the transport of the goods is not authorised in the Australian Dangerous Goods (ADG) Code; or are not being transported in accordance with the ADG Code.
• in accident compensation schemes11
– a driver is required to have been injured for a compensation claim to be made.
Given that a driver is required to observe a large number of laws it is clear that the current meaning of driver is potentially the most significant legislative reform that is broader and deeper than road transport laws.
There are also some provisions where the current construct of the driver creates barriers for specific automated use cases. For example, the requirement in the road rules that the driver must switch off the engine before moving three metres from the vehicle is likely to be a barrier for valet parking functions if the driver is further than this distance from the vehicle.
The meaning of driver is unlikely to be an issue for other types of vehicle automation where a human driver remains responsible for the vehicle.
If the automated driving system is not legally the driver, any requirements on the driver will not apply to it. It therefore seems logical that for highly automated vehicles (when operating in automated mode) and fully automated vehicles, the automated driving system is driving the vehicle and the definition of driver could be expanded to include an automated driving system.
However, such a system is a computer and cannot be a legal entity. Amending the definition of driver therefore leads to a subsequent issue:
This potential lack of a legal entity responsible for the driving function constitutes a gap in the regulations.
Who should be the legal entity responsible for the actions of the automated driving system? There could be a number of potential responsible entities, including the registered owner, the manufacturer, or a service provider maintaining the operating system.
It is feasible that the operating system for automated vehicles will be complex and that a number of these parties could have a contributing role ensuring the safe operation of the vehicle. But a shared legal responsibility for the automated vehicle would potentially create significant confusion and greater uncertainty for all parties. At the very minimum, governments could seek to ensure that driver penalties can be applied to a legal entity for offences caused by the automated driving system.
if, instead of a human, the automated driving system is the driver, who is legally responsible for the automated driving system?
10 The NTC has developed model laws which include the Australian Code for the Transport of Dangerous Goods by Road and Rail, seventh edition (ADGC edition 7.3), a Model Law on the Transport of Dangerous Goods by Road or Rail and a Model Subordinate Law on the Transport of Dangerous Goods by Road or Rail. The model laws are used as a guide for states and territories to create their own laws.11 Accident compensation schemes are regulatory schemes that provide compensation on a fault or no-fault basis. The Transport Accident Act 1986 (Vic) provides an example of an accident compensation scheme.
MED
IUM
-TER
M
REFO
RM

68Regulatory options for automated vehicles
Feedback from the issues paperSubmissions to the issues paper noted the challenges with changing the definition of driver, but there was broad agreement that the current definition will become outdated.
• Queensland TMR noted that it will be necessary to ensure the responsibility is placed on the appropriate entity. It may well be that multiple entities are responsible for a vehicle, for example some combination of registered operator, manufacturer and vehicle maintainer.
• NSW Government noted that definitions of driver should only be amended when automated vehicles have been demonstrated to be capable of performing driving functions safely, in all weather conditions, road environments and traffic conditions. Until such time, there must be a person responsible for ensuring the vehicle operates safely and drink driving laws and driver licensing requirements should continue to apply. Any regulatory changes to accommodate automated vehicles should not weaken existing regulatory controls of traditional vehicles.
• IAG stated that the term driver in the Australian Road Rules should be defined to include automated driving systems. Consideration should also be given to the roles of the owner, the registered operator and the person operating the vehicle, including under what circumstances these individuals may be considered the driver of the vehicle.
• Truck Industry Council stated that state and territory road rules will need to have specific definitions and regulations for both human and automated drivers. The regulatory focus in the short to medium term should be on vehicles that have both humans and automated drivers.
• Gas Energy Australia and ATA stated that the regulatory barriers to a full and uniform adoption of automated road vehicles run deeper than the HVNL, ADRs and road rules, and include safe load issues, tolling and dangerous goods legislation.
• Griffith Law School stated that legal and regulatory barriers are highly specific and can be removed with minor changes, while keeping in place the substantive regulatory scheme. The definition of driver can be easily remedied at this preliminary stage by following the Californian amendment that defines an operator of an automated vehicle as a driver.
• Law Institute of Victoria noted that the definition of driver was also an issue for accident compensation schemes. The definition would need to be broadened to account for the risk that the person may not be said to be driving in the traditional sense and would, therefore, not be eligible to benefits and entitlements under the scheme.
Options The NTC is seeking feedback on how to address the definition of driver. Two options are detailed below:
• Option 1: continue current approach – rely on exemptions, granted on a case-by-case basis, or
• Option 2: expand the meaning of driver in relevant legislation to:
– include an automated driving system; and
– ensure that a legal entity must be responsible for the automated driving system; and
– ensure that the intent of the law can apply to an automated driving system.
We also welcome feedback on alternative options or an approach that incorporates elements of both options.
MED
IUM
-TER
M
REFO
RM

69Discussion paper
Option 1: continue current approach – rely on exemptions, granted on a case-by-case basis
Adopting this option, entities seeking to operate a highly or fully automated vehicle would apply to the relevant state or territory road transport agency for an exemption from traffic laws that require a driver to legally drive the vehicle.
In general, exemptions are not a desirable long-term solution to a widespread issue. However, this option may be appropriate if the large-scale introduction of highly and fully automated vehicles is not anticipated in the immediate future and exemptions are used in the short to medium term to enable specific applications to be tested or for niche deployments. In particular, exemptions could support low-speed passenger shuttles that could be deployed on a limited and defined part of the network.
Exemptions could occur for particular Acts as necessary. Road traffic laws would be the starting point, then more particular laws depending on whether the application concerned heavy vehicles, public transport or dangerous goods. It should be noted, however, that while exemptions can be granted for road traffic legislation, HVNL, passenger transport or dangerous goods transport, criminal law and accident compensation schemes do not have mechanisms to grant such an exemption.12
Any exemption would need to be granted subject to a number of conditions that would ensure safety and ensure road users and members of the public were provided the same level of protection against property damage and personal injury and death as under the existing law. This might mean the entity responsible for the automated vehicle must hold certain levels of insurance.
In due course, the courts would interpret the meaning of driver in legislation and clarity would emerge as to whether or not legislative amendments are required, or whether the courts are prepared to interpret the meaning of driver broadly.
Adopting this option still allows governments to address the issue through legislative reform in the longer term, and to ensure that any reforms are made in alignment with the development of international standards or amendments to international road traffic conventions.
Benefits of the current approach:
• an exemption may be more responsive to emerging needs (for those legislative regimes that have sufficient exemption powers)
• exemptions could be tailored to specific manufacturers, types of automated vehicles and vehicle applications
• exemptions could defer the need to legislate until there is clarity on the optimum legislative approach, taking into consideration the approaches taken in other jurisdictions and at the international level
• there is no indication that the definition of driver is an urgent issue for industry, or that wide-scale deployment of highly or fully automated vehicles on public roads is likely in the short to medium term.
12 Tolling legislation is unlikely to require any form of exemption as long as there is a legal entity that is responsible for paying for use of the road.
MED
IUM
-TER
M
REFO
RM

70Regulatory options for automated vehicles
Disadvantages of the current approach:
• possible inconsistencies – different exemption process and criteria could result in different outcomes across states and territories
• reduced certainty for industry and consumers that highly and fully automated vehicles can operate legally
• a large number of exemptions from road traffic laws and other laws would be required
• exemptions would be required under each relevant regime. A single broad exemption from all relevant laws could not be granted
• not every relevant regime has sufficient exemption powers.
Option 2: expand the meaning of driver in relevant legislation
Adopting this option, governments would amend the meaning of driver in relevant legislation to:
• include an automated driving system; and
• ensure that a legal entity must be responsible for the automated driving system; and
• ensure that the intent of the law can apply to an automated driving system.
We highlighted earlier that NHTSA in the United States has recognised that the concept of the human driver as responsible for the vehicle could become outdated in some automated vehicles. In its open letter to Google, NHTSA stated that it will consider initiating rulemaking to address whether the definition of driver should be updated in response to these changing circumstances (NHTSA, 2016, p. 3). Australia could consider a similar approach and seek to expand the definition of driver to include the automated driving system when it is safe and logical to do so.
In Option 2, road transport legislation and other relevant laws would be amended to the effect that:
1. “Driver” means a human driver, or, if the vehicle is controlled by an automated driving system, the Automated driving system Entity.
2. “Automated driving system Entity” means the entity that is responsible for the automated functions of the vehicle.
These changes are intended to clarify that an automated driving system can operate a vehicle, but that a legal entity must be responsible for that automated driving system and would therefore be the driver from a legal perspective.
This approach does not require legislative reference to the SAE International Standard J3016 or references to highly or fully automated vehicles. Rather, it reflects the principle that underpins the International Standard – that what defines and separates some automated vehicles from other types of automation is that the vehicle is controlled by the automated driving system with no monitoring or intervention required by humans and therefore no requirement for a human driver.
This approach also potentially allows for vehicles that are highly automated some of the time to switch between a human and automated driver in a single journey.
Links to the safety assurance framework
Requiring a legal entity for the automated driving system would enable governments to control the entry of highly and fully automated vehicles onto the market to assure the public that the vehicles can be safely operated on Australian roads.
MED
IUM
-TER
M
REFO
RM

71Discussion paper
Adopting this option, governments would not have to determine who the entity should be and it can remain a matter for the market to nominate the appropriate entity. If a safety assurance framework is progressed, applicants could nominate the automated driving system entity when applying for the automated vehicle registration, licensing or accreditation under the safety assurance framework.
Additional legislative amendments to ensure that the intent of the law can apply to an automated driving system
In addition to the expansion of the definition of driver, some additional legislative amendments may be required to ensure that the intent of the law can apply to automated vehicles. For example, we have seen that in the road rules the definition of left and right sides of the vehicle are defined in relation to the person and the person’s perspective. This could be amended so that the intent of this provision can apply to vehicles that do not have a human driver.
The automated driving system may also need to be exempted from some requirements. For example, we have seen that a driver must be required to stop and give assistance to an injured person. This could be amended so that this provision only applies to a human driver, or occupants of an automated vehicle if they have the capability to assist.
Likewise, driver requirements may need to be modified. For example, to enable an authorised officer to issue a defect notice electronically, instead of giving it to the human driver.
In some situations with highly or fully automated vehicles, the obligation on a driver cannot be performed by the automated vehicle, and a fit and qualified passenger may not be available. In this case, the task would need to be assigned to another party. For example, the current responsibility for the driver to check the load of a heavy vehicle (including a vehicle transporting dangerous goods) could be transferred to the operator, loader or packer.
The chain of responsibility in the HVNL provisions currently create liability for parties based on offending by the driver and stakeholders have raised this as an issue where automated vehicles remove the human driver from the equation. Proposed changes to place positive duties on chain parties and to redefine deemed liability offences as positive duties may remove this barrier and ensure that even if there is no driver there is still a duty to ensure safe transport operations.
» The NTC has identified a significant number of provisions related to driving functions, interaction with enforcement officers or others, or vehicle compliance that would need to be adjusted to accommodate highly or fully automated vehicles. See the annex to the discussion paper for a complete analysis. Amendments to these provisions to ensure the intent of the law is maintained could be reviewed and agreed upon by jurisdictions in a separate legislative review project.
» A project to amend road traffic legislation and relevant laws (including dangerous goods laws, tolling laws, passenger transport laws and accident compensation schemes) to ensure that the intent of the law can apply to the automated driving system could be staged, with priority given to road traffic laws and expanded to other areas depending on the deployment use cases developed by industry.
» A project to amend road traffic legislation and relevant laws could also have regard to appropriate penalties for automated driving system entities. These could apply a corporate multiplier and be larger than current penalties.
» It should be noted that some of these legislative regimes fall outside of the jurisdiction of the Transport and Infrastructure Council, or overlap with other councils or committees under the Council of Australian Governments (COAG) – such as the Law, Crime and Community Safety Council. Agreement with other bodies may therefore be necessary to progress national reform across different legislative regimes.
MED
IUM
-TER
M
REFO
RM

72Regulatory options for automated vehicles
Criminal law
In some jurisdictions, such as Queensland, a person who “operates” a vehicle can be guilty of dangerous driving. In similar offences in other jurisdictions, criminal offences require a driver or driving.
It should also be noted that the common law principle of vicarious liability could also be relevant. This principle holds a person or corporation liable for the actions of another when engaged in an employer/employee/agent relationship. This may require further consideration if changes to existing definitions to include automated vehicles (such as the definition of driver) are made.
Benefits of amending the meaning of ‘driver’ in legislation:
• provides a high level of certainty for governments, industry and consumers
• ensures a legal entity will be responsible for the automated driving system that can be sued or prosecuted with capacity to pay damages and fines
• allows national legislative reform to be a staged process prioritised according to government needs and the direction of the market
• allows for vehicles that switch between a human and automated driver
• links directly to a safety assurance framework to ensure automated vehicles are safe and comply with the road safety and traffic laws
• does not require the SAE International Standard J3016 to be referenced directly in legislation.
Disadvantages of amending the meaning of ‘driver’ in legislation:
• less responsive to emerging needs than an exemption process
• if amended too soon, could be out of step with international developments
• this option may require a corresponding regulatory mechanism, such as a safety assurance framework or registration process, to identify the automated driving system entity
• this option is not appropriate for all areas of legislation and for each Act it is applied to there will need to be exemptions and minor amendments.
MED
IUM
-TER
M
REFO
RM

73Discussion paper
Conclusion It is likely that the reliance on current exemption powers will not provide sufficient legal certainty for large-scale commercial deployment. Governments could wait for the courts to interpret the meaning of driver and driving but that may not be timely and may only address the issues on a case-by-case basis.
Amending the definition of driver and driving in the medium term is likely to provide the greatest certainty that automated vehicle functions can operate legally. Clarifying the definition of driver and driving would also help clarify liability issues.
As an interim measure, governments could support a “default position” that the human driver is deemed responsible for any automated vehicle where the human driver may be required to assume control, and/or must monitor the automated driving system. Such a default position could be in place pending the implementation of a safety assurance framework.
For these reasons, the NTC supports Option 2.
Question 4a: Do you agree that the definition of driver and driving should be amended in relevant legislation? If not, why?
Question 4b: What should be the legal obligations of the entity responsible for the automated driving system?
Question 4c: Are there additional legislative regimes that use the definition of driver that should be considered in any future reforms of the definition?
MED
IUM
-TER
M
REFO
RM

74Regulatory options for automated vehicles
Key points
• The previous two chapters considered the legal implications of automated vehicles undertaking the driving task. This chapter explores the operational challenges of enforcement agencies interacting with automated vehicles and access to data.
• Some highly automated vehicles are expected to switch control between the human driver and the automated driving system. To ensure the effective administration of road safety laws, enforcement agencies, insurers and the courts should be able to identify who is in control of the vehicle at a point in time.
• This issue could also apply to vehicles that are conditionally automated, if it is agreed that control is shared with the automated driving system some of the time.
• The NTC suggests that enforcement agencies further investigate alternative options as the technology and market develops.
Identifying responsibility for a vehicle at a point in time
IntroductionIn a highly automated vehicle there could be times when the human driver is in control and times when the automated driving system is in control. For example, a vehicle may be designed to only be automated when operating on motorways. At all other times, the vehicle must be operated by the human driver. However, while on the motorway, it is feasible that the human driver may not initiate the automated mode and remains in control of the vehicle.
The challenge for authorised officers will be to know who was driving the vehicle at a point in time – the human driver or the automated driving system. This will be critical if the authorised officer is to know that the vehicle is under proper control. The solution could be as simple as a light on the automated vehicle being switched on when it is in automated mode, or an onus placed on one party to demonstrate who is driving at a point in time.
This discussion is based on a clear assumption that enforcement of road rules and vehicle standards will continue to be primarily based on roadside enforcement intercepts for the foreseeable future. However, it is plausible that in a future where the majority of vehicles are automated and operated by a relatively small number of vehicle operators, road regulations will adapt and progress towards an accreditation approach to road safety, similar to the approach taken in rail and aviation. If this were to be the case, the current emphasis on roadside enforcement intercepts could shift towards an audit and investigation approach focussed on automated driving system entities, rather than on human drivers or occupants at the roadside.
8 NEAR-TERM REFORM
LONGER-TERM REFORM
CLARIFY THEN REFINE
MEDIUM-TERM REFORM

75Discussion paper
Issues The issues considered here are not the definition of driver or control, but secondary issues. First, consider that an automated driving system entity can be responsible for the automated vehicle during part of a journey: how would an authorised officer know that the automated driving system entity had control of the vehicle at the time of an offence?
Second, it remains to be seen whether the authorised officer needs to know who was in control of the vehicle at the time of a roadside enforcement intercept: should the officer send the infringement notice to, or start proceedings against, the registered owner as the legal entity responsible for the vehicle?
Under the current legal framework, there must always be an entity responsible for the automated vehicle, even if that entity (or “person” in the legal sense) switches between a human driver and the automated driving system entity throughout a journey.
» See Chapter 7 for a discussion on the automated driving system entity and options relating to how, if at all, the automated driving system entity should be identified in legislation.
As discussed in Chapter 3, there are various levels or types of automation. If the SAE International Standard J3016 is accepted, identifying a responsible person will not be a challenge for partially automated vehicles, given that, by definition, a human driver remains in control of a partially automated vehicle. Likewise, identifying who is in control will not be an issue for vehicles that are conditionally automated if agreement is reached that a human driver remains in control when required to monitor the vehicle. This is a significant assumption that needs validation.
The challenge lies with highly automated vehicles that are fully automated some of the time, but can be driven everywhere else by a human driver at a lower level of automation. The box on the next page provides an example to illustrate the challenge of identifying who is responsible for the vehicle.
MED
IUM
-TER
M
REFO
RM

76Regulatory options for automated vehicles
Who is responsible for a vehicle at a point in time?
Consider that a manufacturer designs and operates a vehicle that can be fully automated on motorways, but is partially automated on all other road types. The human driver can choose to drive the vehicle manually on motorways if he or she chooses to do so.
The manufacturer is the automated driving system entity and has acknowledged its responsibility for compliance with the road rules when the vehicle is operating in highly automated mode on a motorway.
Barbara has purchased such a vehicle and it is registered in her name. Barbara drives onto the motorway and sets the vehicle to “highly automated.” Unfortunately, the vehicle enters a temporary speed zone and the legal speed limit drops from 100km/h to 80km/h. The automated driving system fails to recognise the variable speed sign and the police intercept the vehicle.
What do the police do?
• How do the police know that it was the automated driving system and not Barbara in control of the vehicle at the time of the speed infringement?
• Is there a communications interface that can tell the police that the automated driving system was driving at that time, or do the police issue the speeding ticket to Barbara or the automated driving system entity, and leave it up to the parties to demonstrate who was responsible after the fact?
• How does this scenario change if the speeding infringement was identified by a speed camera?
In the absence of any information about the automated driving system, the police issue Barbara with the speeding ticket as the driver of the vehicle.
What does Barbara do?
• Barbara doesn’t think she should pay the fine or receive demerit points, but how does she access reliable information to provide evidence to the police that, in her defence, the automated driving system was driving the vehicle at the time of the offence?
Barbara writes to the manufacturer asking for a statement that the vehicle was being operated by the automated driving system at the time of the offence.
What does the manufacturer do?
• How does the manufacturer know it was responsible for the vehicle at the time of the offence?
• Does the manufacturer issue Barbara with a statement she can provide to the police?
MED
IUM
-TER
M
REFO
RM

77Discussion paper
This example raises other enforcement issues that will require further consideration and for which a technological solution may be available.
For example, all state and territory road safety and traffic laws have requirements for the driver to obey a direction of an authorised officer to stop the vehicle (see the NTC legislative audit in the annex to this discussion paper). If governments agree that the intent of these provisions should apply to highly automated vehicles, how would the automated vehicle obey a direction to stop if the human driver does not see the police and does not intervene and bring the vehicle to a controlled stop? This could be considered an operational barrier to compliance with current laws.
Furthermore, do enforcement agencies need an on-road mechanism to communicate with automated driving systems to: a) identify that the vehicle is highly automated, and b) direct the automated driving system to stop the vehicle? These are operational issues that could impact upon the efficient administration of the law.
» See Chapter 11 for a discussion on potential issues relating to a human driver’s failure to intervene when the driver is aware that the highly automated vehicle is operating unsafely or an offence is being committed.
Identifying who is responsible for the vehicle is unlikely to be problematic for highly automated vehicles that are always operated by the automated driving system (a vehicle that is always fully automated but is limited in where it can operate).
Serious or indictable offences, such as dangerous driving causing death, are likely to be the result of an investigation or coronial enquiry rather than roadside enforcement. In that context, identifying who was in control of the vehicle at a point in time is more likely to be determined in a methodical and comprehensive way based on access to event data obtained under warrant or other powers. The complexities discussed above are more relevant to roadside enforcement related to traffic infringements and summary offences, when the injury or offence is relatively minor and wide-ranging evidence gathering is not warranted.
Existing owner-onus provisions in road safety laws could be adapted to support deemed control provisions for automated vehicles. The principle underpinning owner-onus provisions is that the road safety laws deem a single entity to have responsibility for the vehicle (the registered owner of the vehicle). Any complexities about who (or what) was in control of the vehicle at a point in time is something the registered owner has to turn his or her mind to, and if it was not themselves in control of the vehicle at a point in time, nominate who was.
Feedback from the issues paperSubmissions to the issues paper noted the challenges of enforcement agencies interacting with automated vehicles. Access to data was a common theme, which was also raised in relation to liability (Chapter 11) and privacy (Chapter 12).
• NZ Ministry of Transport suggested that how rules will be enforced, if there are different requirements for different vehicle types, will be problematic. Equally, how rules will be enforced where control may be passed between the driver and the vehicle at an unknown frequency and by an unknown process will also be problematic.
• Motor Cycle Council NSW noted that an automated vehicle is unlikely to have a “driver” for police to interview to determine if an offence was committed that resulted in a crash.
• Truck Industry Council suggested that a practical approach was required for regulators to determine who or what was controlling the vehicle at a point in time. This would ensure that reliable and correct enforcement can be applied during on-road and roadside enforcement activities.
MED
IUM
-TER
M
REFO
RM

78Regulatory options for automated vehicles
• IAG stated that there must be technology available to identify responsibility for the vehicle at any one time. This clarity is essential to avoid costly and lengthy legal disputes between manufacturers and consumers or between manufacturers and insurers.
Options The NTC is seeking feedback on how enforcement agencies should best identify who was responsible for highly automated vehicles that are fully automated some of the time. Three options are detailed below:
• Option 1: enforcement agencies continue current approach – in the event of an offence, agencies take action against the human driver or registered owner, or
• Option 2: enforcement agencies collaborate with industry to develop technology interfaces that enable police to identify automated vehicles and also identify who was responsible for a vehicle at a point in time, or
• Option 3: amend state and territory road safety and traffic legislation to deem the automated driving system entity of a highly automated vehicle to be responsible for vehicle-related offences.
We also welcome feedback on alternative options or an approach that incorporates elements of both options.
Option 1: enforcement agencies continue current approach – in the event of an offence, agencies take action against the human driver or registered owner
Adopting Option 1, enforcement agencies would continue current approach where – in the event of an offence – enforcement officers would take action against the human driver in the absence of any other legal entity that can be identified as responsible for the action leading to the offence.
There are existing owner-onus provisions for camera-detected offences and parking offences that place the obligation on the vehicle owner to demonstrate that he or she was not responsible for the vehicle at the time of the alleged infringement. This approach might provide a model for holding registered owners responsible for any automated vehicle breach detected by traffic enforcement camera, and for holding the human driver responsible for any automated vehicle breach at a roadside intercept.
The challenge of such an approach is that the human driver, or (in the case of a camera-detected offence) the registered owner of the vehicle, must then interact with the automated driving system entity to obtain the relevant vehicle data to support his or her claim. For example, the automated driving system entity could provide the driver or owner with a statement or statutory declaration recognising that the automated driving system was in control of the vehicle at the time of the offence. However, without legal obligations to provide this information, the driver or owner may not be in a strong position to obtain the data, particularly if they are interacting with a defunct or offshore entity.
It should also be noted that, adopting this option, there may still be a need for enforcement agencies to know that the vehicle is a highly automated vehicle. This could be achieved through signage, special registration plates or an operational interface between automated vehicles and enforcement agencies.
Benefits of the current approach:
• reduces the need for enforcement agencies to interact with automated driving systems
• creates certainty in the market in relation to how road safety and traffic laws will be enforced for automated vehicles
• is an extension of the current approach for speed camera and parking infringements.
MED
IUM
-TER
M
REFO
RM

79Discussion paper
Disadvantages of the current approach:
• the human driver or registered owner may not have the data to support their claim and there could be an additional interaction required with the automated driving system entity to obtain the information
• could appear inconsistent to consumers if they are told that they are not responsible for the vehicle when it is highly automated, but receive any infringements
• responsibility for the vehicle is determined after the fact, whereas authorised officers may seek to know who was in control at the roadside.
Option 2: enforcement agencies collaborate with industry to develop technology interfaces
Adopting Option 2, technology interfaces would be developed by industry to enable enforcement agencies, such as police, to identify highly automated vehicles at the roadside and to identify whether the human driver or automated driving system was in control and responsible for a vehicle-related offence at a point in time.
This approach could draw on a wide range of technologies and applications. Alternatively, a highly automated vehicle could have historical data displayed on a screen that identifies who was in control of the vehicle. This data could be printed, visually observed by authorised officers or transmitted to enforcement agency systems.
It is highly likely that any technology interfaces between automated vehicles and enforcement agencies will be developed by manufacturers within an international market. Therefore, while this option relies on cooperation between enforcement agencies and industry, it is expected that any technology interface requirements would develop in-step with international developments.
Prior to the development of any international vehicle standards, communication protocols governing the technology interface between highly automated vehicles and enforcement agencies could be a criterion in the safety assurance framework. In the event that jurisdictions do not agree to the development of the safety assurance framework to manage the safe deployment of automated vehicles, governments could rely on industry to cooperate with enforcement agencies to protect consumers from being unfairly prosecuted for traffic offences they did not commit.
Benefits of developing technology interfaces:
• supports industry innovation and allows for systems interfaces to develop in step with technology development
• allows enforcement agencies to identify responsibility for the vehicle at the roadside and supports effective administration of road safety laws
• ensures that evidence will be in a format that can be interpreted and support a prosecution.
Disadvantages of developing technology interfaces:
• unless the technology interface is captured in an ADR or legislation, there would be no legal basis for manufacturers to co-operate in the development of data access systems
• there are potential security risks if there are communication links between police and commercial systems
• without certification or systems assurance, enforcement agencies would rely on commercial systems to issue an infringement to a party, potentially without knowing that the data is accurate.
MED
IUM
-TER
M
REFO
RM

80Regulatory options for automated vehicles
Option 3: deem the automated driving system entity of a highly automated vehicle to be responsible for vehicle-related offences
Adopting Option 3, enforcement agencies would not seek, or require, information about who controlled the automated vehicle to issue an infringement. Rather, the automated driving system entity would have full legal responsibility for vehicle-related compliance with road safety and traffic laws.
This option mirrors Option 1, but applies the “deemed control provision” to the automated driving system entity rather than the registered owner or human driver. This approach recognises that the automated driving system entity is likely to have access to the information that can prove who was in control of the vehicle at the time of the offence. This approach would therefore reduce the process steps required to identify the responsible party.
Benefits of “automated driving system entity” deemed responsibility:
• places responsibility on the party that is most likely to have the relevant information
• reduces the need for enforcement agencies to interact with automated driving systems
• creates certainty in the market in relation to how road safety and traffic laws will be enforced for automated vehicles.
Disadvantages of “automated driving system entity” deemed responsibility:
• requires an identifiable automated driving system entity (this issue is discussed in Chapter 7)
• requires authorised officers to have access to the identity of the automated driving system entity for every registered vehicle
• potentially places responsibility on off-shore commercial entities (this issue could be addressed as a criterion in the safety assurance framework)
• responsibility for the vehicle is determined after the fact, whereas authorised officers may seek to know who was in control at the roadside.
Conclusion In the medium term, the current approach is likely to be the most feasible solution until automated vehicle technology and the market matures. In the longer term, it may be appropriate to place the legal onus of responsibility for highly automated vehicles on the automated driving system entity, given that this entity will have the data on hand to demonstrate who was in control of the vehicle at a point in time.
For these reasons, the NTC supports Option 1 at the current time, but suggests that governments further investigate options as the technology and market develops.
Question 5: Do you agree that the driver or registered owner should be deemed responsible for the actions of the automated vehicle, and for governments to further investigate options as the technology and market develops? If not, why?
MED
IUM
-TER
M
REFO
RM

81Discussion paper
Key points
• The highest levels of driving automation will not require human driver-related features that are currently required by law in the ADRs and in-service vehicle standards. These include requirements for a steering wheel, control panels, mirrors and brake pedals.
• In the longer term, continued requirements for outdated standards are likely to be a barrier to the introduction of technology that could have significant societal benefits.
• Highly and fully automated vehicles could also warrant new standards to ensure they can operate in compliance with road rules, are secure from hacking, and that communicate with other vehicles and infrastructure safely. Exemptions could be used in the near to medium term.
• The NTC supports a continued reliance on exemptions, granted on a case by case basis, until international standards are developed.
Vehicle design and standards
Introduction The highest levels of driving automation will have no requirements for human driving, monitoring or intervention. They are “self-driving” and have only passengers or freight. These automated vehicles potentially have the highest societal benefits, particularly in terms of productivity (no human drivers) and mobility (they can be used by unlicensed drivers).
Vehicles that have no components of human driving will not need human driver-related features, such as a steering wheel, control panels, mirrors and brake pedals. These features are currently required by the ADRs and in-service vehicle standards. If new vehicle standards were not introduced in due course, highly and fully automated vehicles could not operate in Australia without an exemption.
Additional vehicle standards could also be introduced for highly and fully automated vehicles. These could include security, data management and communications standards. However, it is also important that Australia is aligned with UN Regulations wherever possible.
Australian Design Rules
The ADRs are national vehicle standards applied to most vehicles imported or manufactured in Australia. The ADRs are generally performance based and cover issues such as vehicle structure, lighting, noise, engine exhaust emissions, anti-theft controls and braking. One of the purposes of the ADRs is to make road vehicles safe to use. An ADR is to be taken to be a safety standard within the meaning of the Australian Consumer Law.13
13 For the purposes of section 106 – Supplying consumer goods that do not comply with safety standards, and section 122 – Compulsory recall of consumer goods.
9 NEAR-TERM REFORM
MEDIUM-TERM REFORM
LONGER-TERM REFORM
CLARIFY THEN REFINE

82Regulatory options for automated vehicles
The ADRs are enacted through the Motor Vehicles Standards Act 1989 and managed by the Commonwealth Department of Infrastructure and Regional Development. The Department is reviewing the Motor Vehicles Standards Act 1989 (Cwlth) and represents Australia on the United Nations Working Party 29 (WP.29) to harmonise vehicle regulations.
While Australia may decide its own vehicle standards, it is Australian Government policy to harmonise the ADRs with international regulations, primarily through the adoption of the United Nations Economic Commission for Europe (UNECE) standards, now referred to as UN Regulations. This approach ensures that ADRs do not impose additional barriers to market entry by requiring standards that are unique to Australia and would unnecessarily increase consumer costs.
Issues Requirements in the ADRs that compel manufacturers to install unnecessary vehicle components could slow the introduction of highly and fully automated vehicles into Australia.
UNECE and NHTSA have also recognised that existing vehicle standards may no longer be fit for purpose in relation to highly or fully automated vehicles. However appropriate solutions to deal with this issue has not yet been developed.
In March 2016, the 1968 Vienna Convention on Road Safety was amended in relation to driver control of the vehicle. The amendment specifically addressed vehicle systems which influence the way vehicles are driven. It specified that they must comply with international legal instruments for the “construction…of wheeled vehicles, equipment and parts which can be fitted and/or be used on [a] wheeled vehicle,” but did not set specific standards.
In February 2016, NHTSA addressed issues regarding highly automated vehicle compliance with US safety standards. In its open letter to Google (NHTSA 2016), NHTSA noted some of the issues with human driver-related requirements, such as rear view mirrors, and recognised that vehicle standards may need to evolve. However, NHTSA noted that without an appropriate performance standard against which to evaluate new technology, certification would not be possible.
» The NTC identified 16 current ADRs that are constructed around a human driver and may be unnecessary barriers to some highly and fully automated vehicles. These are detailed in the NTC’s legislative audit contained in the annex this discussion paper.
» Any future amendments to the ADRs would subsequently impact the in-service vehicle standards for light and heavy vehicles.
Courtesy RDM Group – UK’s first driverless pod
LON
GER
-TER
M
REFO
RM

83Discussion paper
No barriers in Australian Design Rules up to the level of highly automated
Any vehicle that will require a human driver will continue to have to comply with existing ADRs (or if necessary, obtain an exemption from the relevant Commonwealth minister). This is because the safety case for the requirements within the ADRs for these vehicles would still be valid. For example, ADR 4 (driver seat belts) specifies the distance and position of anchorage for the belt relative to the steering column. This is valid because there is still a human driver sitting behind the steering column, even if that person isn’t always undertaking the driving task in an automated vehicle.
There are also cases of highly automated vehicles that meet all current ADRs, such as the Google car (picture, above). This is a regular light vehicle retrofitted with technology to operate in a highly automated mode. In this case the ADRs provide no barriers as the vehicle is already compliant.
Many ADRs will continue to remain relevant to all vehicles
The majority of ADRs relate to safety and environmental objectives and should be retained for all types of automated vehicles. These ADRs are focussed on the physical structure of the vehicle. At this stage there is no reason why the structural makeup of the vehicle in terms of safety or emissions should be different for automated vehicles and conventional vehicles. Such structural ADRs include occupant vehicle impact standards or side door latches and hinges, which are relevant whether or not the driver is human. Emissions levels are also relevant regardless of automation.
Examples of ADRs that will continue to remain relevant to all vehicles
ADR 2 – Side Door Latches and Hinges: side door latches and hinges do not relate to the human driver function and would remain relevant.
ADR 69 – Full frontal occupant protection: vehicle impact standards are for the protection of occupants but would be relevant regardless of whether a system or a human was operating the vehicle.
Google car
LON
GER
-TER
M
REFO
RM
iStock.com/Jason Doiy

84Regulatory options for automated vehicles
Some ADRs may not apply to highly or fully automated vehicles
Many of the current ADRs are designed to maximise safe operation of the vehicle by and for a human driver, however with higher levels of automation it is likely that some of these will no longer be required. It is important to note that these changes would only apply to some vehicles that are highly and fully automated. Any vehicle that requires or allows a human driver to undertake the driving task at any point would need to meet current ADRs.
There is also a question around safety requirements, such as requiring the installation of airbags, for vehicles designed only to operate at low speeds. For example, an automated vehicle such as the RDM Lutz pathfinder, a two seater “pod” is currently being trialled in the UK. The Lutz only operates on a pedestrianised road and has a maximum speed of 25kmph, and a case could be made that such a vehicle would be unlikely to need high impact safety features.
In terms of in-service vehicle standards, the Heavy Vehicle (Vehicle Standards) National Regulation (HV(VS)NR) and state and territory Light Vehicle Standards Rules also have provisions that assume a human driver presence that impact on the design of the vehicle. For example, provisions regarding the driver’s view and vehicle controls that require the road and traffic to be clearly visible from a normal driving position and that the controls are within safe reach. In some highly or fully automated vehicles a clear view or access to controls will not be necessary.
Examples of ADRs and in-service vehicle standards potentially not relevant to automated vehicles where a human driver cannot undertake the driving task
ADR 10 – Steering column: a highly automated vehicle may not requiring steering controls “actuated by the driver.”
ADR 14 – Rear view mirrors: a highly automated vehicle may not require rear view mirrors because there is no requirement for a driver to use them or there is no human driver at all.
ADR 18 – Instrumentation: a highly automated vehicle with a “vehicle speed sensor” may not require a speedometer to display speed to a driver.
ADR 21 – Instrument panel: a highly automated vehicle may not require an instrument panel to provide driving-related information to the passengers of the vehicle.
ADR 35 – Commercial Vehicle Brake System: a highly automated vehicle may not need an “optical warning system” to signal braking to the driver, if the driver is a system. In the same way the brake may not need to be located within reach of the driver if the driver is the system.
HV(VS)NR 8 – Driver’s view and vehicle controls: a highly automated vehicle may not require a clear view or access to controls if there is no requirement for a human driver to use them.
Some ADRs may need to be adapted for automated vehicles
Some ADRs may need to be adapted for automated vehicles. For example, ADR 31 provides that a vehicle’s brake system must be able to be operated by the driver “from his driving seat without removing his hands from the wheel.” Clearly, the intent of the vehicle standard – to ensure a functioning brake system – should continue to be required for automated vehicles, but the engineering specification could be updated to remove the connection between the brake system performance capabilities and the human driver.
LON
GER
-TER
M
REFO
RM

85Discussion paper
Any changes should only apply to relevant automated vehicles in parallel to the existing ADRs. The exiting ADRs would continue to apply to lower levels of automation.
Examples of ADRs that remain relevant, but may need to be adapted for automated vehicles where a human driver cannot undertake the driving task
ADR 4 – Seatbelts: for the safety of occupants, seatbelts may still be required for automated vehicles that are not low-speed passenger transport vehicles. However the engineering prescription could be updated for seatbelt requirements that relate to the driver’s seat and the positioning of the seat belt vis-à-vis the driver and the steering column.
ADR 6 – Direction Indicators: defines a direction indicator as “a device mounted on a motor vehicle or trailer which, when operated by the driver, signals the latter’s intention to change the direction in which the vehicle is proceeding.” In the case of vehicles with capabilities such as lane change assist, operation “by the driver” may not be necessary.
ADRs 13 and 19 – Installation of Lighting and Light Signalling Devices: specify that front lamps must not be mounted “forward of a vertical transverse plane through the rear most point of the driver’s seat.” This engineering prescription could be updated to ensure the safe installation of lighting devices for vehicles that don’t have drivers. Further, the rule could be updated to allow reduced lighting voltage for those automated vehicles that only require front lights to ensure the vehicle is seen by other road users, and not for the occupants of the automated vehicle to see the way ahead.
ADR 31 – Brake systems: the ability for a vehicle to stop or slow is required whether or not the vehicle is automated. However, the system may no longer need to be operated by the driver “from his driving seat without removing his hands from the wheel.”
ADR 44 – Specific Purpose Vehicle Requirements: interior lighting would likely still be useful for occupants of a highly or fully automated vehicle, but the requirement that controls can be “operated by the driver from the normal driving position” may no longer be necessary.
New ADRs may be required to ensure safe technology
Due to the emerging capabilities of automated vehicles, it may be appropriate to introduce additional vehicle standards to manage new risks. These could relate to:
Demonstration that the vehicle can comply with the Australian Road Rules
In the event that automated vehicles take on greater responsibility for the safe driving of the vehicle, the ADRs may have a role ensuring new and imported vehicles are safe and comply with the Australian Road Rules.
One approach may be to develop an ADR that sets out a performance-based requirement for vehicles to be compliant with the road rules. Unless road rules are fully standardised across all states and territories, such an Australian profile would require subsets for each jurisdiction and it could be the manufacturers’ responsibility to ensure that each subset remains current. An alternative approach would be to rely on automated vehicles operating in compliance with road rules without requiring standards or assurance to prove that they can do so.
LON
GER
-TER
M
REFO
RM

86Regulatory options for automated vehicles
Sufficient protection and management of security and access to data
Automated vehicles will rely on operating systems to operate safely. Automated vehicles could become highly susceptible to malicious attacks, particularly those advanced automated vehicles that do not have a human driver to intervene. At the same time, it is possible that automated vehicles will exchange data via cloud services and roadside infrastructure, and this exchange creates additional cyber-security risks. Given the increased likelihood and consequence of cyber security attacks and interventions of malicious intent, minimum standards for trusted access to data and protection from cyber-security attacks may be warranted.
Safe communication between vehicles
Standards could relate to ensuring automated vehicles safely communicate with other vehicles and infrastructure. Developing C-ITS international standards provide an example of a communication requirement that could be embedded in an ADR at a future time. However, the necessity of requiring standardised communications protocols will depend on the extent to which automated vehicles will come to rely on vehicle-to-vehicle and vehicle-to-infrastructure communications to operate safely.
Risks and issues related to security, data and communications could also be relevant to partially and conditionally automated vehicles.
Feedback from the issues paperSubmissions to the issues paper broadly agreed that current vehicle standards should be maintained as they are for the short to medium term. There was strong support for the continuation of current government policy of close alignment with UNECE regulations.
• Queensland TMR stated the importance of ensuring national consistency of vehicle standards to make certain that a vehicle purchased in one jurisdiction can be driven in another. Any departure from international standards will risk vehicle manufacturers not providing their newest vehicle features in the Australian market. The Department agreed that some ADRs will change and some new ones will have to be introduced. Vehicle standards for automated vehicles will be created internationally and Australia will need to adopt those standards. It will become increasingly difficult to justify differences in road rules between jurisdictions if road rules are required to be encoded into vehicle systems.
• Northern Territory Government, Insurance Council of Australia and the Truck Industry Council agreed that any vehicle standards in Australia should be aligned with UN Regulations. The Truck Industry Council stated that the ADRs should not be extended to regulate on-road driving tasks, which can be dealt with through the road rules.
• AAA stated that at this stage the ADRs shouldn’t need to be adapted considerably as a human driver will be required to intervene if necessary. However, ADRs may need significant alteration to define and specify new systems and to set functional requirements of systems.
• FCAI stated that if a regulatory standard needs to apply to a vehicle entering the market (e.g. ensuring its C-ITS will be inter-operable with the Australian network) this standard must be included in the ADRs. This will ensure that any certification and enforcement activity will be captured within the existing vehicle type approval system. Setting up a separate or parallel scheme will only add significant and unnecessary cost to manufacturers and government.
• ARRB suggested that if ADRs were to capture more of the driving task, it may be useful to consider Brown’s taxonomy of functional driving activities (Brown, 1986)
LON
GER
-TER
M
REFO
RM

87Discussion paper
focussed on route finding, route following, velocity control, collision avoidance, rule compliance and vehicle monitoring.
OptionsThe NTC is seeking feedback on regulatory options for automated vehicle standards.
• Option 1: continue current approach – rely on exemptions, granted on a case by case basis, until international standards are developed, or
• Option 2: adopt new ADRs that support highly and fully automated vehicles.
We also welcome feedback on alternative options or an approach that incorporates elements of both options.
Option 1: continue current approach – rely on exemptions, granted on a case by case basis, until international standards are developed
Adopting this option, the existing vehicle standards are maintained with no additions or alterations. The Commonwealth Department of Infrastructure and Regional Development would continue to actively pursue engagement with WP.29 and other international standards committees to ensure they continue to be updated as the technology develops. For testing purposes and limited deployment, existing Commonwealth exemption powers can be utilised. The Commonwealth could also use safety assurance framework criteria (discussed in Chapter 6) to assess exemption applications.
Benefits of the current approach:
• provides continuity with international standards and certainty for industry and consumers
• utilises an existing administrative system
• ensures that Australia does not specify new vehicle standards before technology and market maturity – thereby minimising the risk that new vehicle standards will become outdated.
Disadvantages of the current approach:
• existing ADRs could create potential barriers for highly and fully automated vehicles that have significant societal benefits
• it could be many years before international standards are developed
• exemptions are not practical for large scale introduction of vehicles – an increase in exemption applications could impose significant administrative burdens on manufacturers and governments
• could signal to the market that Australia is not ready for large-scale commercial deployment of highly and fully automated vehicles.
Option 2: adopt new ADRs that support highly and fully automated vehicles
Adopting this option, the Australian Government would collaborate with industry to adopt parallel ADRs for automated vehicles prior to international agreement on automated vehicles standards.
Maintaining a safe standard for vehicles on Australian roads is the underlying purpose of the ADRs. Providing clear standards for vehicles that do not need a human driver to operate safely will reduce barriers and encourage innovation. Performance based standards specifically for highly or fully automated vehicles is one of the ways to provide governments with assurance that vehicle designs are safe while reducing the risk of new ADRs becoming outdated or too technology-specific.
LON
GER
-TER
M
REFO
RM

88Regulatory options for automated vehicles
Benefits of new ADRs:
• Australia would be a world leader addressing automated vehicle barriers in vehicle standards
• provides market certainty and encourages innovation
• supports the consistent evaluation of vehicle types
• operates within the current regulatory framework and could reduce the need for additional government oversight of automated vehicles.
Disadvantages of new ADRs:
• not consistent with established government policy
• not consistent with stakeholders feedback
• could, at least initially, result in Australia being unaligned with international standards
• higher risk that new ADRs will become outdated
• administrative costs to develop and implement new ADRs.
Conclusion The likelihood of large-scale commercial deployment of highly and fully automated vehicles that do not require a human driver is not anticipated for a number of years. If this assumption is correct, it is most likely that the continued use of the current exemption process is the most suitable approach at this time. This approach provides certainty in the short-to-medium term for industry and ensures that ADRs and in-service vehicle standards are adapted in step with UN Regulations.
For these reasons, the NTC supports Option 1. In the longer term, governments should adopt new ADRs and in-service vehicle standards for automated vehicles, in step with the development of international standards.
Question 6: Do you agree that governments should continue to rely on vehicle standards exemptions at this point in time? If not, why?
LON
GER
-TER
M
REFO
RM

89Discussion paper
Vehicle modification and in-service compliance
Introduction Vehicles are subject to ADRs when they are introduced to market. Vehicles must to continue to comply with those rules, and additional in-service rules under state and territory law, while they are used on roads.
In this chapter, we explore what additional oversight, or compliance enforcement, of in-service vehicle standards may be warranted for automated vehicles. Increased regulatory oversight may be reasonable if the impact of unregulated automated vehicle modification poses an unacceptable safety risk to the community.
» A related issue is access to vehicle data for repair and maintenance purposes. See Chapter 12 for a discussion on privacy and access to data for commercial purposes.
Issues A vehicle could be modified under very different scenarios. Automated vehicle modification could include:
• commercial modifications undertaken by a licensed third-party repairer
• non-commercial modifications – such as a “backyard” modification by the vehicle owner
• modifications directly undertaken by the manufacturer – such as software updates that modify the performance of the vehicle.
Each of these modification types has different risk profiles. For example, commercial and manufacturer modifications are subject to consumer law and product liability, while non-commercial modifications are not subject to consumer law, though vehicle owners would have a personal incentive to ensure their vehicle operates safely.
Key points
• Vehicle modification is a broad concept that could include any physical and software changes that impact a vehicle’s safety performance and compliance with standards – it could include over-the-air software updates, non-commercial modifications and after-market fitment of automated vehicle technologies.
• Vehicle modification could require increased regulatory oversight if modifications to automated vehicles significantly impact vehicle safety.
• The NTC supports the industry development of modification standards that address automated vehicle issues.
10 NEAR-TERM REFORM
MEDIUM-TERM REFORM
CLARIFY THEN REFINE
LONGER-TERM REFORM

90Regulatory options for automated vehicles
Today, modification to conventional vehicles can impact vehicle safety. For example, replacing a vehicle’s wheels can impact its automatic braking system performance. As vehicles become increasingly automated, there is a risk that modifications to the physical vehicle (including vehicle sensors) and modifications to vehicle software (including software that ensures compliance with the road rules) could impact the safe operation of the automated driving system.
State and territory road agencies currently rely on a mix of self-regulation and roadside enforcement to ensure compliance with vehicle standards. In most jurisdictions, vehicle roadworthy checks are also required on an annual basis or when the vehicle is sold or re-registered.
Manufacturers manage physical modification to vehicles through the development of accredited repairer networks and codes of practices. For example, the Motor Vehicle Insurance and Repair Industry has a voluntary code of conduct for vehicle repairers. The FCAI has also developed the Voluntary Code of Practice for Access to Service and Repair Information for Motor Vehicles.
However, there is currently no formal industry or government oversight of non-tangible modifications by manufacturers, such as software updates that could significantly modify vehicle performance.
Vehicle modification could continue to be self-regulated within the context of consumer laws and product liability. The example of Tesla’s over-the-air update of its Model S, that installed its Autopilot application (pictured) and was subsequently amended because of consumer misuse, illustrates the significance of software updates and how industry self-regulates in the context of consumer law and product liability.
‘Tesla Model S Autopilot function’
In 2015, Tesla Motors issued an over-the-air update to its Model S vehicle. The update, known as Version 7.0, installed its Autopilot application which enabled the vehicle to autonomously steer within a lane, change lanes with the simple tap of a turn signal, and manage speed by using active, traffic-aware cruise control.
Image: Courtesy Tesla Motors Shortly after release of Version 7.0 it became clear to Tesla Motors that the autopilot
function was being misused by some drivers and that safe performance of the vehicle could be at risk. Without government oversight or additional regulation, Tesla Motors modified the function and introduced additional vigilance controls in a subsequent over-the-air software update.
CLA
RIFY
TH
EN
REFIN
E

91Discussion paper
Depending on the content of the update, over-the-air software updates by manufacturers could be viewed as vehicle modifications and will increase in importance as vehicles become more automated. Furthermore, as vehicles become more reliant on sensor information, modifications to the physical vehicle that impact the performance of sensors could become a critical issue.
The Tesla example illustrates what can happen in a partially or conditionally automated vehicle. The risks of tangible and intangible vehicle modification significantly increase in highly and fully automated vehicles where there is no human driver. In highly and fully automated vehicles where there is no human redundancy to safeguard vehicle performance, governments may seek increased regulatory oversight because the consequences of a substandard modification are much higher. This could occur especially in relation to non-commercial vehicle modifications that are undertaken privately and outside the scope of consumer law and product liability (and could include owners hacking their own vehicles).
The risk profile of vehicle modification will also depend on the extent to which there are safety redundancies built into the vehicle if one part of the system fails because of a substandard modification. For example, if the automated function is disabled because the sensors no longer work, the safety-related risk caused by vehicle modification is significantly increased.
The issue of vehicle modification also interacts with manufacturer liability if the warranty is voided because of an unauthorised modification.
Vehicles retrofitted with automated functionality are another consideration. Aftermarket fitment could be self-regulated by industry, or there could be a role for governments to oversee aftermarket automation because of the high risk to road safety if the aftermarket device is incorrectly fitted.
State and territory governments already have legislative instruments to undertake vehicle inspections if they wish, and to issue and revoke motor vehicle repairer licences. There are also precedents for greater regulatory oversight of modification based on safety or environmental risks. For example, after the introduction of the Ozone Protection and Synthetic Greenhouse Gas Management Regulations Act 1989, many vehicles using chlorofluorocarbon (CFCs) in air conditioning systems needed to be upgraded. Governments agreed the competence of mechanics to upgrade air conditioning systems was a significant safety issue that warranted regulatory oversight, and the Australian Refrigeration Council was appointed to administer the Ozone Protection and Synthetic Greenhouse Gas Act 1995. As a result, a licensing regime to handle refrigerants and air conditioning equipment was introduced.
As noted in Chapter 6, a high risk problem is a sufficient reason for explicit government regulation in accordance with the Best Practice Regulation Handbook.
Feedback from the issues paperSubmissions to the issues paper generated a mix of views on the increased regulatory oversight of modifications to automated vehicles.
• NSW Government stated that there must not be too much reliance on consumer law to ensure vehicles comply with standards and are safe in relation to vehicle standards and modifications. Relevant fair trading requirements should also to be considered when exploring issues relating to the modification and in NSW, motor vehicle repairs and modifications must also comply with the requirements of the Motor Dealers and Repairers Act 2013.
• Northern Territory Government acknowledged governments have a responsibility to ensure road networks operate safely, which necessarily includes maintenance and modification of automated vehicles. The Department suggested that this may be best
CLA
RIFY
TH
EN
REFIN
E

92Regulatory options for automated vehicles
achieved through the adoption of a co-regulatory model.
• FCAI suggested that the current state-based compliance regime for light vehicle in-service standards might be adequate but, in the context of automated vehicles, enforcement of in-service standards may need to increase.
• Truck Industry Council stated that unauthorised modifications and hacking of automated systems is potentially a major safety issue that needs to be addressed through regulation and enforcement. The apparent lack of enforcement of heavy vehicle speed limiting and engine exhaust emissions “defeat” devices were cited as examples where regulation needs to be backed by effective enforcement.
One anonymous submission stated that self-certification for new or aftermarket modifications would not be acceptable due to high safety and other risks, even with regulatory oversight and prequalification. The submission suggested that only government or an authorised third-party with associated controls should carry out this task.
Options The NTC is seeking feedback on how governments should address modification issues for automated vehicles.
• Option 1: continue current approach – relying on the current regulatory framework to detect and manage non-compliance with in-service vehicle standards, or
• Option 2: governments support industry development of modification standards that address automated vehicle issues, or
• Option 3: develop national legislation to administer an automated vehicle licensing modification regime, developed as part of the deployment framework for automated vehicles.
We also welcome feedback on alternative options or an approach that incorporates elements of the options discussed here.
Option 1: continue current approach to detect and manage non-compliance with in-service vehicle standards
Adopting this option, road agencies would rely on the current regulatory framework to manage vehicle modification risks in relation to road safety. This approach relies on manufacturers and commercial third parties undertaking vehicle modifications that are safe and compliant with in-service vehicle standards. Most jurisdictions also have regulatory mechanisms in place, including roadside enforcement and roadworthy vehicle checks undertaken by independent third parties, either on an annual basis or as a condition of sale (depending on the vehicle type and the requirements specific to each state and territory).
A consistent and proactive industry response to vehicle modification could be supplemented by vehicle inspection enforcement that is adapted to automated vehicles and commensurate with the increased risks.
Benefits of the current approach:
• balances industry self-regulation with moderate government oversight
• does not make significant changes to the current regulatory framework until there is a clear market failure or significant heightened safety risk that would justify increased government oversight.
CLA
RIFY
TH
EN
REFIN
E

93Discussion paper
Disadvantages of the current approach:
• may not provide consumers with sufficient certainty that modification risks are being successfully dealt with
• roadworthiness requirements only relate to in-service vehicle standards and do not cover broader safety performance issues, such as modification impacts on cyber-security or management of vehicle data
• there are currently no standards specific to vehicle automation that a roadworthy scheme needs to cover
• vehicle inspection requirements are not consistent across jurisdictions.
Option 2: industry development of modification standards that address automated vehicle issues
Adopting this option, governments would support industry development of modification standards that address automated vehicle issues. This could include matters relating to competencies of mechanics to modify automated vehicles, managing software updates and aftermarket fitment, and could take the form of guidelines or an expansion of the current industry repair code.
Like Option 1, a consistent and proactive industry response to vehicle modification could be supplemented by vehicle inspection enforcement that is adapted to automated vehicles and commensurate with the increased risks.
Benefits of industry-led modification standards:
• proactively manages the increased risk of vehicle modification within the current regulatory framework
• does not make significant changes to the current regulatory framework until there is a clear market failure or significant safety risk that would justify increased government oversight
• is able to cover broader safety performance issues, such as modification impacts on cyber-security or management of vehicle data
• an industry code or guidelines can be developed in alignment with international developments
• supports national consistency.
Disadvantages of industry-led modification standards:
• industry may not reach agreement on how vehicle modification should be managed
• an industry code or guidelines are unlikely to address non-commercial vehicle modification risks
• an industry code or guidelines may be less effective than adapting enforcement approaches to vehicle modification.
Option 3: legislate an automated vehicle licensing modification regime
Adopting this option, governments would take a central and proactive role to ensure that automated vehicle modifications meet agreed safety performance criteria. This approach could be developed as part of the safety assurance framework for automated vehicles, and/or linked to vehicle registration and roadworthiness requirements. It would involve the government accreditation or licensing of third-party service providers, such as mechanics, to modify automated vehicles or automated driving systems.
CLA
RIFY
TH
EN
REFIN
E

94Regulatory options for automated vehicles
The requirement of a regulatory scheme should be based on a careful risk assessment of different types of vehicle modification. In a similar way to the CFC refrigerant modification regime, this approach could be focussed on aftermarket fitment of automated vehicle technology.
Such a scheme would require close cooperation with industry to identify relevant training and competencies that third parties would need to undertake vehicle modifications. The scheme could also involve an industry group or association to oversee and administer the scheme. In this sense, it would be a co-regulatory approach because the scheme would be managed by industry but backed up by legislation.
If a safety assurance framework is adopted, a different approach may be to require all modifications to be overseen by the automated driving system entity. For example, the after-market fitment of automated vehicle technology could be required under regulation to be the responsibility of the automated driving system entity. Requirements for vehicle modification and after-market fitment of automated vehicle technology would then be included in the eligibility criteria of the safety assurance framework.
Benefits of a modification licensing scheme:
• highest level of certainty for industry and consumers
• provides a legislative framework for industry to work within and agree standards
• penalties in the legal framework could help address non-commercial modifications
• can be developed in alignment with international developments
• supports national consistency.
Disadvantages of a modification licensing scheme:
• could increase modification costs for automated vehicles
• governments may not be able to recover all costs of a licensing modification regime
• may not be effective without supplementary enforcement
• may be too soon to develop a legislative response, given that the safety risks are unclear and any international protocols relating to oversight of automated vehicle modifications have not been developed.
Conclusion Further understanding the potential risks that could arise from vehicle modifications, or from vehicles becoming non-compliant while in-service, is required to justify additional regulatory oversight. For example, we do not yet know the extent to which manufacturers will build redundancy into automated vehicles to compensate for failing sensors. In the event that modifications create additional safety risks, industry is likely to be proactive about addressing those risks without further government intervention.
For these reasons, the NTC supports Option 2.
Question 7: Do you agree with the development of industry-led standards to address modification of automated vehicles? If not, why?
CLA
RIFY
TH
EN
REFIN
E

95Discussion paper
Liability
IntroductionThere are a number of issues related to liability. This chapter has four sections that consider the following issues separately before turning to the options analysis:
1. Liability is well-established but assigning fault could be more complex.
2. Access to vehicle data is a critical issue for some insurers.
3. Limitations on road manager liability.
4. Compulsory third-party insurance schemes could change.
Each issue underscores the complexity of automated driving. However, this paper does not set out to resolve these complexities, but to identify the roles of government and industry to address them.
Automated vehicles are expected to save many lives, but through system failure they could cause the loss of a small number of others, resulting in a net gain for society but an extremely difficult problem from a community attitude perspective.
Liability risks could prevent the roll-out of more automated vehicles or severely reduce their functionality or scope of operations if manufacturers become excessively cautious (Glancy et al, p.37). At the same time the threat of future litigation also acts as an incentive, ensuring rigorous testing and research before any public release.
The issues paper outlined three broad areas of law that encompass liability– tort, contract and product liability. These concepts are well established, with common law supplemented by regulation in certain areas, including no fault legislation covering personal injuries in some jurisdictions. Our legal system also allows for joint, several and
Key points
• Clarifying whether human monitoring of the vehicle is control will help clarify liability.
• Prima facie responsibility could change for highly or fully automated vehicles.
• Access to vehicle data is a critical issue for some insurers.
• Limitations on road manager liability may be a barrier.
• Compulsory third-party insurance schemes could change.
• The NTC supports the development of industry guidance, including information about liability and education campaigns. No legislative reforms should be considered at this time.
This discussion paper does not set out to resolve all liability complexities, but to identify the roles of government and industry to address them
11NEAR-TERM
REFORMMEDIUM-TERM
REFORMLONGER-TERM
REFORMCLARIFY
THEN REFINE

96Regulatory options for automated vehicles
contributory liability, where a manufacturer, operator or service provider could contribute in part to a collision (and be held liable for this contribution) even if it is not wholly responsible.
Issues
1. Liability is well-established but assigning fault could be more complex While legislation and common law principles are well established, the issue of who is liable in the event of a crash involving automated vehicles will likely become more complex.
Manufacturers are already subject to product liability, and this is likely to increase in importance as vehicles increasingly rely on the automated driving system to perform driving functions. The added complexity of automated vehicles relates primarily to two factors:
1. Complexity of the automated vehicle operating environment.
More parties could be responsible for a crash, including government and private road managers if automated vehicles become dependent on road infrastructure to operate safely. For example, because the automated vehicle relies on accurate speed data, road signage or line marking.
Other areas of liability that could take on greater importance include provision of software updates and cyber-security to adequately prevent hacking.
2. Continued interaction between human and machine.
Some automated vehicles will require humans to take over the driving task at different times. When is a crash caused by the automated driving system as distinct from being caused by the human driver?
The failure of a human driver to intervene and stop the vehicle from crashing could partly be the fault of the manufacturer if the manufacturer does not include sufficient driver vigilance controls or the human-machine interface is poorly designed. For example, because vehicle marketing encourages the driver to relax, read or go to sleep; or because there were no human-machine interface requirements to physically and mentally reconnect with the driving task through touching the steering wheel or engaging with the system in some way.
The impact of vigilance controls will also be an issue for highly automated vehicles that require the driver to take back control after a period of automated vehicle driving, for example because the vehicle is exiting the motorway after several hours of automated driving. From a liability perspective, an important consideration will be the vigilance controls a manufacturer has introduced to ensure that the human driver is in the minimum cognitive state of awareness required to take back responsibility for the vehicle.
Vehicle occupants are also likely to be able to intervene and stop an automated vehicle if they foresee a crash – does this create a liability on occupants if they don’t intervene? In the event that a highly automated vehicle is involved in a crash, it remains to be seen what liability the human driver or other passengers may have if they foresaw the crash and could have intervened to prevent it but did not. It is likely that these scenarios will depend on the facts of each case and include such factors as whether the occupant was licensed to drive and had the physical and mental capacity to intervene.
CLA
RIFY
TH
EN
REFIN
E

97Discussion paper
Clarifying whether human monitoring of the automated driving system is “control” will help clarify liability
As discussed in Chapter 5, the meaning of control could cover monitoring and intervention functions of the human driver in an automated vehicle. If accepted, this approach could help clarify liability issues for vehicles that have conditional automation, because it would provide a prima facie position that the human driver is liable for the operation of the vehicle. However, the issue of liability remains complex because any technical or mechanical malfunctions that were the fault of the manufacturer would continue to be subject to product liability laws.
The box below illustrates how the human driver responsibility to monitor and intervene could create joint or contributory liability. The example suggests that the interaction between driver and product liability is potentially unclear and is highly dependent on the facts.
NAVIGATING LIABILITY IN A VEHICLE WITH CONDITIONAL AUTOMATION
Peter drives a heavy vehicle that is automated when operating at low speed in a port precinct. The driver’s manual and in-cab warning systems state that “You must monitor the vehicle system at all times and override the automated driving system if there is a malfunction. You remain responsible for the safe operation of this vehicle.”
Peter has used the automated function many times and trusts that it works. One day the sensors fail and the in-cab system requests Peter to take back the driving function. However, Peter is distracted and does not brake fast enough to prevent the vehicle colliding with a shipping container. No-one is hurt, but there is significant damage to the heavy vehicle.
The manufacturer claims:
• Peter had responsibility to monitor the vehicle and to intervene if requested, which he failed to do. He is therefore liable.
• While the manufacturer has responsibility to ensure the sensors work properly, it shouldn’t be held liable because the system is designed with the expectation that the driver will respond appropriately if requested.
Peter claims:
• He is partly responsible because he didn’t brake in time to prevent the crash.
• The manufacturer contributed to the crash because:
1. the cause of the crash was the sensor failing, which was the fault of the manufacturer
2. there were no vigilance controls to engage him in the monitoring task
3. even if he wasn’t distracted, there was insufficient time between the alarm sounding and the collision for him to intervene and avoid the collision
4. the manufacturer should have developed safety redundancy in the heavy vehicle that automatically activated the brakes if the human driver did not intervene.
This example doesn’t identify who is liable. But it highlights the complexity of liability, particularly in vehicles that are conditionally automated when the failure of the product and the failure of the driver could both contribute to a crash.
CLA
RIFY
TH
EN
REFIN
E

98Regulatory options for automated vehicles
Prima facie liability could change for highly or fully automated vehicles
Currently, an at-fault driver is held responsible for any damages caused as a result of an incident and the at-fault driver’s insurance company covers the costs associated with those damages. If after investigation, the incident was found to have been caused by the actions or negligence of other entities, such as the vehicle manufacturer, the insurance company can pursue those other entities to recover their costs (Queensland TMR submission, p.7).
Queensland TMR concluded that it is reasonable that this paradigm should continue for vehicles that have partial or conditional automation, but that this prima facie responsibility could shift to manufacturers or the automated driving system entity. This approach would be in line with the SAE International Standard J3016 for Automated Driving, which classifies a vehicle as highly or fully automated because it is controlled by the automated driving system.
Several manufacturers have already announced that they will accept liability for their automated vehicles in certain conditions. It is possible that in the longer term the manufacturer or the automated driving system entity could be assigned prima facie liability for crashes involving highly and fully automated vehicles on the grounds that they have become responsible for the majority or entirety of the driving task. Adopting this approach, the manufacturer would be liable for all crashes involving highly or fully automated vehicles, but the manufacture’s insurance company would be able to recover costs from other involved entities. This would have significant impacts on the insurance market.
» The potential development of registration or licencing of the automated driving system entity (discussed in Chapter 6) would further validate a shift in prima facie liability.
Feedback from the issues paperStakeholder submissions to the issues paper generally agreed that the current regulatory framework for liability was sufficiently robust for automated vehicles, but that assigning fault would be more complex. There were different views on the extent to which this complexity should be managed through regulation or whether Australia should adapt overtime, in alignment with international approaches.
• Queensland TMR agreed that fully automated vehicles are likely to see a shift to product liability models. The Department proposed that the simplest solution for fully automated vehicles may be to assign prima facie liability to the manufacturer for damages caused by their vehicles and allow the manufacturer’s insurance company to recover costs from other involved entities.
• State Growth Tasmania noted that as the focus progressively shifts from the driver doing the right thing to the vehicle and road infrastructure doing the right thing, there will be a commensurate shift in liability.
• Northern Territory stated that more detailed work will be required in the future to clearly define expectations of drivers, manufacturers, service providers and road managers in a manner that supports both continued innovation and a safe road environment.
• Victoria Police noted that liability associated with systems hacking, and ensuring the remote security of technology and systems needs to be addressed.
• NZ Ministry of Transport noted that the NZ ITS Technology Action Plan stated that the NZ Government would not consider liability at this time, but await international developments.
• Insurance Council of Australia suggested that the road rules specify who is in control of a conditional, highly or fully automated vehicle, thereby clarifying liability. The Insurance Council suggested that this could potentially be complemented by an ADR
CLA
RIFY
TH
EN
REFIN
E

99Discussion paper
classification system that specifies what automated functions a particular vehicle is authorised to perform and who is responsible for its actions at those times.
• IAG identified other parties that could have additional liability, including infrastructure managers, telecommunication providers, road agencies and entities that retro-fit automated technologies. Consideration must also be given to who is responsible for any incidences of cyber-attack or hacking of automated systems and how these events are to be remedied and consumers be compensated in the event of any resulting loss, injury or damage.
• FCAI’s current position is that current laws, in broad terms, are able to, and should, be used for automated vehicles. As a general principle, FCAI members accept that, subject to applicable terms and conditions, they are responsible and accept liability for the vehicles that they manufacture and sell, at whatever levels of automation the vehicles might have.
• Truck Industry Council stated regulations must clearly define who is responsible for system or vehicle failures that occur as a result of an automated vehicle being poorly maintained, or modified, by the vehicle’s owner. Regulators should consider world best practices and refrain wherever possible from developing uniquely Australian regulations for automated vehicles.
• Warren Centre (University of Sydney) stated the challenge is to adopt systems definitions that enable the market and the legal system to assess liability effectively. Distinguishing between the system executing the full driving capability, contrasted to the human responding and adjusting the vehicle is the most important definition to be addressed. If the technology reduces the responsibility of the driver, a no-fault approach could be attractive. A difficulty is how the cost of liability extends to manufacturers.
2. Access to data is a critical issue for some insurers The question of how liability would be resolved in the event of an automated driving system failure will be important in providing certainty to consumers, manufacturers, insurers and road managers.
From a data perspective, two key issues were identified through the consultation process:
1. Event data recorder: the functionality of automated driving systems to accurately record events leading up to an incident and to identify whether the human driver or the system was in control of the vehicle, so that responsibility can be allocated.
2. Access to the event data recorder: potential barriers to enable third parties, primarily insurers, to access the event data recorder in a format that enables the third-party to interpret the data to identify and agree fault.
Manufacturers and operators have a strong liability and commercial incentive to develop and implement in-vehicle systems that accurately record driving events and are capable of reconstructing an incident as evidence receivable in court. Therefore, the development of event data recorders that can meaningfully distinguish between events caused by the automated vehicles system and events caused by the human driver is expected to be developed by industry without government regulation.
Manufacturers and operators do not necessarily have the same incentives in relation to providing third parties with access to the information; yet a streamlined and cost-efficient mechanism to access event data could rationalise the process of insurance claims and reduce litigation. A clear process to identify responsibility could also address consumer concerns that human drivers will be blamed for the actions of the automated driving system. Governments therefore have a potential role facilitating third-party access to event data recorder information to correct a potential and perceived market failure.
CLA
RIFY
TH
EN
REFIN
E

100Regulatory options for automated vehicles
In the longer term, these data complexities could be significantly reduced if manufacturers or automated driving system entities have prima facie liability for highly or fully automated vehicles. However, future insurance models will likely be dependent on international developments and it is too early to predict the direction of the insurance markets and the extent to which manufacturers would be willing to take prima facie liability.
» Government agency access to event data recorder information is discussed in Chapter 8.
» Independent repairer access to diagnostic information is discussed in Chapter 12.
Feedback from the issues paperThere were a range of views expressed on the role that governments should have to facilitate access to data to identify fault.
• IAG emphasised that consumers require certainty as to who is liable and how losses will be remedied, with a clear path to compensation without the need for legal proceedings. IAG noted that this may mean that automated vehicles need to log actions in significant detail to enable the tracing of causation and to determine who was in control at a particular time. While control of the vehicle is shared, IAG suggested that there will continue to be a need for both personal insurance and manufacturers’ liability insurance.
• FCAI has a concern about releasing vehicle information. For third parties to be able to interpret vehicle data it is necessary for them to be given access to specific software that would allow access to the vehicle’s entire operating system. FCAI considers that this creates significant safety and security issues that will be exacerbated when that information relates to an automated and connected vehicle.
• ADVI suggested that there may be issues as to whether human error caused or contributed to a crash involving an automated vehicle, which could be complex from an evidentiary perspective. A key risk will therefore be the potential for concealment of information by manufacturers. ADVI suggested an independent body could be established to have ownership of event data. This would address the risk of different rules across jurisdictions; and provide clear guidance and a clear path towards resolving liability issues.
• Motor Cycle Council NSW stated that there needs to be certainty that sufficient data is captured to determine who is at fault in the event of a crash. Access to this data needs to be guaranteed regardless of privacy issues so that liability for the crash can be determined. If not, the default position needs to be that the vulnerable road user is not at fault.
3. Limitations on road manager liability may be a barrier Depending on the technology paths adopted, we could see greater reliance on roadside infrastructure to ensure the safe operation of automated vehicles. For example, if an automated heavy vehicle relies on C-ITS vehicle-to-infrastructure connectivity to receive warnings that the vehicle is approaching a low bridge, and the infrastructure signal fails, resulting in a crash, a case could be made that the road manager was (at least partly) liable.
However, today the civil liability of road authorities varies across each state and territory. This is likely to result in different liability outcomes in different jurisdictions and potential uncertainty for industry and consumers. For example, in Victoria the road authority must maintain a public road to the standard specified in any relevant road management plan, while in NSW the road authority is not liable unless it had actual knowledge of a particular risk that resulted in harm. In South Australia the road authority has no liability.
CLA
RIFY
TH
EN
REFIN
E

101Discussion paper
It is unclear what impact these limitations on liability will have on the safe operation of automated vehicles. Substandard physical or digital infrastructure could be a practical barrier to entry into the Australian market for automated vehicles, but the current trend led by manufacturers such as Volvo, Daimler and Google is to develop automated vehicles capable of operating on a wide range of road types and using multiple sensor inputs to understand the road environment. It therefore remains to be seen whether automated vehicles are being designed with particular road infrastructure requirements that would be the responsibility of road managers to maintain, and which in turn would be adversely affected by road manager liability restrictions. Alternatively, if there was liability, road managers may not install essential infrastructure, on the basis that they cannot afford the risk exposure.
It is also questionable whether a road manager’s exposure to liability is necessarily the only or principal incentive to ensure the infrastructure is “fit-for-purpose”.
The potential exposure to liability underscores the importance of ensuring that automated vehicles only access those parts of the network that are “fit-for purpose”. Road management liability is a further factor when considering what role governments should have to manage the safe operation of automated vehicles (discussed in Chapter 6).
Private road managers, such as toll operators, also have legal responsibilities to maintain road infrastructure to agreed minimum standards. These standards could evolve over time to safely accommodate automated vehicles.
» Austroads is currently investigating the emerging requirements for road operators to support automated vehicles. The project scope includes physical infrastructure (including road signs, line marking and road geometry) and digital infrastructure (including road data and communications coverage). This work would be a key input to future guidelines.
Feedback from the issues paperThe issues paper did not generate an extensive amount of comment on potential barriers related to road manager liability.
• NSW Government noted that road management liability should take infrastructure costs into consideration, given that road agencies do not have unlimited budgets. It stated that consideration should be given to industry’s potential responsibility in contributing to costs to upgrade roads in relation to C-ITS and automated vehicles.
• State Growth Tasmania suggested that if infrastructure liability risk exists, road authorities may be forced to take a very conservative approach to the types of infrastructure and environments that they will permit more automated vehicles to travel on.
• Truck Industry Council stated that the liability of states and territories should have to ensure that automated vehicles are maintained and are roadworthy when in-service.
• ConnectEast noted that the infrastructure requirements for private road operators remains to be seen. In theory they could be held responsible for some incidents if the infrastructure is found to be deficient. ConnectEast also noted that an additional area of liability is software updates, and identifying who is responsible for an incident caused by an update not occurring.
CLA
RIFY
TH
EN
REFIN
E

102Regulatory options for automated vehicles
4. Compulsory third-party insurance schemes could change A number of states have compulsory third-party personal injury schemes, often funded through or in addition to registration payments. They provide compensation for personal injuries sustained in crashes on public roads. Some of these schemes are run on a no-fault basis, others are fault-based. Although no-fault schemes manage liability for most personal injury cases, liability may still be an issue in some cases, including those involving challenges to decisions of the authority administering the scheme and those involving exceptions within respective Acts (such as contributory negligence).
It was noted in the submission feedback detailed below that a claim upon some compulsory third-party schemes, such as the scheme in NSW, can only be made if a death or injury to a person is caused by the fault of the owner or driver of a vehicle. Unless the definition of driver is expanded to include the automated driving system (as discussed in Chapter 7) a death or serious injury involving an automated vehicle in NSW would not be eligible under the scheme and parties would have to rely on product liability.
In the longer term, compulsory third-party insurance schemes could change if the prima facie liability shifts from the at-fault driver to the manufacturer or automated driving system entity. This shift in liability and potential changes to registration models may also result in changes to how compulsory third-party schemes are funded.
Feedback from the issues paperSubmission feedback raised some important legislative barriers to accessing compulsory third-party insurance schemes.
• Law Institute of Victoria recommended that the definition of driver in Victoria’s no-fault compensation scheme be updated to ensure that injuries sustained in automated vehicle crashes will be captured in the current scheme. The Law Institute also noted that damages recoverable in common law tort should not be reduced or restricted depending on fault.
• Law Society of NSW noted that the current compulsory third-party scheme in NSW only applies if the death or injury to a person is caused by the fault of the owner or driver of a motor vehicle. Alternatively, the accident must be blameless and not caused by the fault of any person. This creates a complex situation for injured people where there are two different motor accident compensation schemes operating in NSW.
• IAG stated that compulsory third-party insurance schemes need to be aligned as part of the consideration of who has proper control and operation of vehicles. This was considered necessary given that schemes across Australia are different in their approach to fault and no fault and offer differing levels of benefits to those injured in a motor crash.
CLA
RIFY
TH
EN
REFIN
E

103Discussion paper
Options The NTC is seeking feedback on how governments should support resolution of liability issues for automated vehicles. Four options are detailed below:
• Option 1: continue current approach – rely on existing liability regimes to resolve liability issues on a case-by-case basis, or
• Option 2: Option 1, plus governments support the development of industry guidance, including information about liability and education campaigns, or
• Option 3: governments agree to develop nationally-consistent legislation for some or all of the following areas:
– 3a: clarify legal liability for automated vehicle parties, based on levels of automation
– 3b: regulate third-party access to automated vehicle event data information for prescribed purposes
– 3c: harmonise road manager liability provisions
– 3d: address compulsory third-party insurance issues and potential barriers.
We also welcome feedback on alternative options or an approach that incorporates elements of the options discussed here.
Chapters 6–8 in this discussion paper dealt with the meaning of driver, the meaning of control and identifying who is responsible for the vehicle. Resolution of these issues – particularly removing ambiguity related to the meaning of control – would help clarify liability, however they are not replicated in the options detailed below.
Option 1: continue current approach – rely on existing liability regimes to resolve liability issues on a case-by-case basis
Adopting this option, existing liability regimes would be relied upon to resolve liability issues without additional action from governments. Current regulatory insurance models would not be adapted until there is market and technology certainty.
Given the established principles in tort, contract and product liability, and the lack of strong evidence that liability concerns are holding back the development of the technology, there is a legitimate argument that automated vehicles can operate within the existing liability regimes. Liability issues could be dealt with by the courts under existing laws and commercial parties could establish their own approaches to dealing with liability issues and mitigating their liability risks.
Furthermore, governments in Australia and New Zealand anticipate that the development of liability and insurance markets for automated vehicles will evolve at an international level and it is important that we do not intervene unnecessarily in the insurance sector.
Benefits of the current approach:
• industry can continue to manage liability in the absence of a quantifiable problem that needs to be addressed by governments
• supports market innovation
• allows time for the technology to settle and the human-machine interface issues to be clearly understood and evaluated before determining how liability should be adjusted
• allows time for the international community to agree on a common approach.
Disadvantages of the current approach:
• identifying who is at fault may be less certain, which may impact market confidence and slow implementation
CLA
RIFY
TH
EN
REFIN
E

104Regulatory options for automated vehicles
• could result in costly litigation to obtain automated vehicle data to assign fault accurately, with subsequent impact on premiums for automated vehicles and on consumer certainty that fault will be correctly assigned in the event of a collision.
Option 2: support industry guidance, including information and education campaigns
Adopting this option, governments would support the automotive and insurance industries developing best-practice guidance on liability issues. The principal purpose of the guidance would be to address questions of fault and causation in complex automated vehicle scenarios. Guidance material, or an industry code of practice, could also manage industry agreement on sharing event data information with commercial third parties, such as insurers.
Industry guidance could also have regard to a range of mitigation measures for manufacturers, operators and others. This could include, but is not limited to:
• additional driver training
• information provision, both in-vehicle and in the owner’s handbook, communicating to the driver their responsibilities, any system limitations and warnings
• redundancy of sensors and communication systems to improve reliability
• event data recorders to resolve disputes and for system diagnostics (with appropriate data safeguards)
• fall-back measures and warnings to the driver when systems are not functioning correctly
• prudent advertising and marketing of systems to avoid over-reliance or false expectations
• appropriate insurance.
Information and education campaigns could also assist in raising the profile of automated vehicles in order to encourage consumer behaviour best-practice and ensuring consumers are informed about the capabilities and limitations of different use cases.
Benefits of industry guidance:
• flexible and timely method to clarify liability as the technology develops
• government support helps facilitates the development of guidance in an increasingly disruptive, fragmented and complex market
• allows for international approaches to be adopted in Australia.
Disadvantages of industry guidance:
• guidance could be developed by industry with minimal or no involvement of governments
• industry may not be able to agree on key issues, particularly release of event data to third parties
• industry guidance, consumer information and education campaigns may assist in addressing some of the human factor issues, but would not guarantee consistent behaviour given that systems will develop in different ways.
Option 3: governments agree to develop nationally-consistent legislation
Adopting this option, governments would have a pro-active role regulating liability, across some or all of the following areas:
» 3a: Clarify legal liability for automated vehicle parties, based on levels of automation.
CLA
RIFY
TH
EN
REFIN
E

105Discussion paper
Clarifying legal liability in legislation is of value to stakeholders who highly value legislative certainty, such as the Truck Industry Council and Insurance Council of Australia. A classification system could be introduced (based on the SAE International Standard J3016) that defines liability for each level of automation. This option could include specifying in legislation those parties involved in an automated vehicle that are liable in the Australia Road Rules, ADRs, or a mix of both. It could also act as an additional mechanism to ensure vehicle standards are maintained.
» 3b: Regulate third-party access to automated vehicle event data information for prescribed purposes.
Crash causation data will be vitally important in resolving complex evidentiary and causation issues. If industry cannot agree on a process to access and share relevant automated vehicle data in a way that is consistent with privacy principles, governments could regulate commercial third-party access to event data recorder information in defined circumstances for insurance claims purposes.
Government regulation could ensure the efficient process of claims and accurate allocation of fault, thereby providing the insurance industry and consumers with increased certainty about exposure to liability. To be practical, event data recorder information would be required in such a format that will enable third parties to assess who was responsible for a vehicle at a point in time, in a similar way that governments may seek to access the data for enforcement purposes (see Chapter 8).
» 3c: Harmonise road manager liability provisions.
Adopting this option, state and territory road management legislation would be harmonised to ensure that a single approach to the liability of road managers is adopted in Australia. It may be the case that the value of harmonisation will be dependent on requirements of the technology and that it may be beneficial to wait for further market maturity before evaluating the necessity of this option. For example, it is unclear at this stage the extent to which automated vehicles will be more reliant on particular infrastructure standards than conventional vehicles.
It will also be necessary to agree on what the civil liability approach for road infrastructure should be – the test for liability could include “actual knowledge” in addition to a materialised harm. But it could also be based on a risk assessment approach or by reference to agreed standards in a road management plan.
» 3d: Address compulsory third-party insurance issues and potential barriers.
Adopting this approach, state and territory compulsory third-party insurance schemes would be reviewed and amended to ensure that automated vehicle occupants can be covered by each scheme.
Benefits of legislative reform:
• supports a transparent and nationally-consistent approach to liability in Australia
• increases consumer confidence that human drivers will not be blamed for the actions of the automated driving system
• increases market certainty, including certainty that road manager liability will be consistent across all Australian jurisdictions
• regulating access to event data recorder information could support a streamlined and cost efficient mechanism to access data that may otherwise not be agreed by industry
• rationalises the process of insurance claims and potentially reduces litigation
• legislates privacy protections for insurance policy holders
• supports Australia as a “single market” for automated vehicles.
CLA
RIFY
TH
EN
REFIN
E

106Regulatory options for automated vehicles
Disadvantages of legislative reform:
least flexible approach – legislation may become out-of-date if automated vehicle use cases and crash scenarios change as the technology and business models develop
legislating liability could become inconsistent with international practices and result in barriers to the Australian market
road authority immunity from liability is a long-standing approach
it is not yet clear that there is a market failure that warrants government regulation of third-party access to event data recorder information
it is not yet clear that different forms of road manager liability will impact the introduction or uptake of automated vehicles.
Conclusion Liability issues generate a range of complex issues relating to attributing fault, access to data by third parties, road manager liability and insurance. Though related, each of these issues could be addressed in different ways. Given that the complexities of liability will likely increase with the emergence of highly automated vehicles it is likely too soon for governments to take legislative action. However, consumers would also benefit from industry guidance about how automated vehicles will impact liability.
For these reasons, the NTC supports option 2.
Question 8: Do you agree that governments should support industry-led guidance to address automated vehicle liability issues? If not, why?
CLA
RIFY
TH
EN
REFIN
E

107Discussion paper
Privacy
Introduction Protecting the privacy of users will be a critical success factor for the deployment of automated vehicles. Public perceptions about automated vehicles will be partly shaped by how the personal information of consumers is handled and whether there are clearly defined privacy protections.
Automated vehicles have the potential to generate significant amounts of location information that could be personal information. Automated driving systems are likely to have a complex structure of interrelated functions, roles, responsibilities and entities that may, under different circumstances, access, disclose, hold or destroy personal information.
Personal information generated by automated vehicles could also be much broader than location information. It could include data attributes such as time, seat occupancy, vehicle speed, and phone call and social media use.
Sharing of personal information generated within automated vehicles may be reasonably required for certain safety, public policy or enforcement purposes. For example, some automated vehicles could not function safely without the exchange of location information that could also be personal information. It may also be reasonable for an authorised officer to access location data as part of a criminal investigation. But there are other scenarios that the community may not view as being reasonable uses of personal information, or which could require additional checks and balances. These could include:
• automated vehicle operators who sell personal information to third parties for marketing and advertising purposes
• enforcement agencies “fishing” for speed offences by matching automated vehicle location data to speed zone maps
• local authorities accessing location data to identify parking offences
• shared vehicle users being able to access the history of a vehicle and identify the movement of a previous user of the vehicle.
Key points
• Privacy principles may be sufficiently robust to regulate private sector access to personal information, but some in industry seek greater certainty about access to vehicle data for commercial purposes.
• Government access to automated vehicle data, for enforcement, infrastructure or other purposes, may warrant additional legislative privacy protections.
• The NTC supports the continued regulation of privacy protections through Australian Privacy Principles and state-based Information Privacy Principles. Legislative controls on the use and access to automated vehicle personal information by governments may be warranted when the privacy risks are better known.
12IMMEDIATE
REFORMMEDIUM-TERM
REFORMLONGER-TERM
REFORMCLARIFY
THEN REFINE

108Regulatory options for automated vehicles
Australia has existing privacy protections that will very likely apply to automated vehicles. In the event that automated vehicles generate personal information, the entities responsible for the collection and handling of that information will be subject to privacy laws: namely the Australian Privacy Principles contained in the Privacy Act 1988 that applies to commercial entities with a turnover of more than $3 million and Commonwealth government agencies, and Information Privacy Principles that apply to most state and territory government agencies.
Automated vehicles will also be regulated by Commonwealth, state and territory surveillance device laws that prohibit covert surveillance of individuals through the use of surveillance tracking devices. Surveillance laws provide that a person shall not use a tracking device to determine the geographical location of a person without the express or implied consent of that person.
Privacy risks could therefore be managed within the current privacy and surveillance frameworks operating in Australia. This discussion paper considers whether there is anything unique or high risk about automated vehicles that would potentially benefit from privacy protections in addition to the Australian Privacy Principles and the application of the Privacy Act 1988, state-based privacy regimes and surveillance laws.
Issues Protecting personal information will be dependent on answering two key questions:
• will automated vehicles generate personal information?
• will consumers be able to opt-out from using automated technologies that generate personal information?
Will automated vehicles generate personal information?
The Privacy Act 1988 regulates the collection, use, disclosure, security and access of personal information in Australia. A private sector organisation with a turnover of more than $3 million or a Commonwealth agency must collect personal information by lawful and fair means only and not in an unreasonably intrusive way.
Section 6 of the Act defines personal information as:
Information or an opinion (including information or an opinion forming part of a database), whether true or not, and whether recorded in a material form or not, about an individual whose identity is apparent, or can reasonably be ascertained, from the information or opinion.
The definition of personal information is sufficiently broad to include location information if it is about an individual whose identity is apparent or can be reasonably ascertained from that information. The Privacy Act 1988 will not apply if the information does not identify an individual.
One of the policy challenges for automated vehicles is that there is no single technology road map to deployment. It is therefore difficult to make definitive judgements about the likelihood that automated vehicles will generate personal information. However, it is expected that automated vehicles will generate significant volumes of data, some of which will be based on precise location information using Global Navigation Satellite System (GNSS) technology.
For GNSS data to be classified as personal information, the identity of the vehicle owner or user must be apparent. This will not always be the case. For example, if an automated passenger transport vehicle generates location information using GNSS, but there is no practical way to identify the passengers using the vehicle, then the data is unlikely to
CLA
RIFY
TH
EN
REFIN
E

109Discussion paper
constitute personal information. Or if a service provider collects a vehicle’s unique number but has no method to match that number to a vehicle registration or individual, then it is unlikely that data would meet the “reasonably identifiable” test and so would not be personal information.
On the other hand, if the automated vehicle is privately owned and the technology uses GNSS, it is more likely that the data will be personal information because the identity of the individual using the vehicle will be apparent.
Some automated vehicle technologies will rely on C-ITS that exchange data between trusted sources. An example of C-ITS is the use of vehicle-to-vehicle communication to share information about a vehicle’s position, motion and controls (such as brake status). Automated vehicles may use this information to supplement sensor information based on non-cooperative technologies, such as radar, laser and optical technology.
To manage the risk of cyber-security vulnerabilities and malicious attack, these exchanges will rely on a system of certified identification numbers generated and received between vehicles and infrastructure. From a privacy protection perspective, the key issue is whether data exchanged between connected systems is “reasonably identifiable” and so constitutes personal information.
There is a range of C-ITS data messages that are planned to be broadcast and received. The two main data messages likely to be used are the:
• Cooperative Awareness Message (CAM), which is near-continuously broadcasted by a C-ITS device, at up to 10 times per second. All C-ITS devices that are within range can receive a CAM. For vehicles, the CAM contains data attributes such as vehicle location and speed.
• Decentralised Event Notification Message (DENM), generated when an event occurs and contains information about the event. This could include traffic conditions, road hazards, road works, or a traffic signal violation warning.
In 2016, Austroads is commissioning a privacy impact assessment to determine whether the CAM and DENM data messages used in C-ITS should be considered personal information, and to recommend actions to address any identified privacy issues. Outcomes of this assessment are anticipated mid-2016.
In Europe, an expert group advising the European Commission on the development of C-ITS in the European Union has recently published the C-ITS Platform Final Report (Brussels, 2016). Working Group 4 (WG.4) considered data protection and privacy issues. The group advised that:
An important question debated by WG4 was to determine whether data exchanged via
CAM and DENM would be classified or not as personal data. After various consultations,
WG4 concluded that “transmitted CAM and DENM messages are to be considered personal data,” mainly because these data give access to the vehicle identification
and indirectly to the identity of the vehicle owner. Therefore, the EU legislation on data
privacy and data protection applies (C-ITS Platform Final Report, p. 53).
The findings of WG4 are not binding on the European Commission and the practicability of being able to reasonably identify an individual based on C-ITS data remains to be seen. Nonetheless, there is a strong likelihood that automated vehicles using GNSS, C-ITS, or other forms of communication that provide location information, will generate personal information. If so, entities responsible for the automated collection, use, disclosure, security and access of the personal information will have to comply with privacy and surveillance legislation.
CLA
RIFY
TH
EN
REFIN
E

110Regulatory options for automated vehicles
Will consumers be able to opt-out from using automated technologies that generate personal information?
The privacy impact of automated vehicles will depend on the deployment model introduced for the technologies that generate personal information. At a broad level, three options are available:
• Opt-in model – where consumers explicitly activate automated vehicle technology and accept the privacy implications of doing so; or where consumers explicitly purchase automated vehicles or applications
• Opt-out model – where consumers can “switch off” the automated technology and consequently the transmission of location information
• Mandatory model – where consumers who choose to purchase or use an automated vehicle must accept the privacy implications and there is no ability to “switch off” the automated technology and subsequent location information.
Clearly, privacy protections become more critical in a mandatory approach. It is also important to note that opt-in and opt-out models are premised on consumers being able to make informed choices, which may not always be the case. WG.4 considered the issue in the context of C-ITS and found that:
While the principle of the “informed consent” is of the upmost importance, the secondary use of C-ITS data might also be taken into account. In most cases, an opt-out possibility should be offered to the drivers, authorizing the driver to shut down the broadcast (while fully informing him about possible adverse consequences) (C-ITS Platform Final Report,
p.48).
The challenge for automated vehicles is that a consumer may decide not to drive in an autonomous mode, but this may not necessarily mean that the communication technology generating location information and used for automated driving purposes is also inactive. These are the types of issues that will need to be considered by technologists and designers as they develop vehicles and applications that balance optimum technology performance with privacy protections for consumers.
Private sector handling of personal information
The issues paper suggested that the development of automated vehicles does not appear to depart from an opt-out commercial arrangement and that automated vehicles could operate within the same privacy framework as consumers today opt-in to ridesharing services that generate location information. Therefore, the issues paper suggested that at this stage in the development of automated vehicles, the Privacy Act 1988 and the application of the Australian Privacy Principles appear to be sufficiently robust to provide industry with the tools to protect personal information, and provide consumers with confidence their personal information is being handled appropriately.
The issues paper also recognised that consumers need to continue to ensure they scrutinise privacy policies and make informed choices about how their personal information is used for commercial purposes.
Government access to personal information
Government agencies engaged in enforcement actions have much greater access to personal information under privacy laws than do private sector organisations.
The NTC issues paper suggested that the benefits of automated vehicles may not be realised if consumers are uneasy about government access to their personal information. It should therefore be clear to consumers how their personal information will be accessed and used by enforcement agencies, and the treatment of automated vehicle data should be consistent
CLA
RIFY
TH
EN
REFIN
E

111Discussion paper
across enforcement agencies and jurisdictions.
One approach canvassed in the issues paper is the decision by the then Standing Council on Transport and Infrastructure in 2013 to agree in principle to stronger privacy restrictions for government access to C-ITS data (in the event that C-ITS data is reasonably identifiable). The Council approved the following recommendation:
Recommendation 4: In the event that individuals can be reasonably identified from the safety data message broadcast by C-ITS devices, that specific legislative protections are developed to define in what circumstances organisations that are exempt from compliance with privacy principles, including enforcement agencies, may access C-ITS personal information (NTC, 2013, p. 26).
The issues paper sought stakeholder views on adopting a similar approach in relation to government agency access to data generated by automated vehicles. It is noted, however, that should the CAM and DENM data messages generated by C-ITS be found to constitute personal information, and the Council’s 2013 decision is implemented, then that legislative protection will extend to automated vehicles that use C-ITS. But without further agreement by the Transport and Infrastructure Council, the 2013 decision would not apply to other technologies used by automated vehicles that could generate personal information, including GNSS location information.
Feedback from the issues paperStakeholder submissions to the issues paper primarily focussed on ensuring government agencies or commercial entities could access data for legitimate purposes. There was limited feedback on whether individuals using automated vehicles should have strengthened privacy protections. This is perhaps indicative of the uncertain technology path that automated vehicles are taking and the extent to which automated vehicle use can be anonymous remains to be seen.
• Queensland TMR, State Growth Tasmania and the Northern Territory agreed that existing privacy principles are likely to be sufficiently robust to adequately regulate access to personal information, subject to technology developments.
Access to the data for enforcement purposes was also regarded as important. Queensland TMR suggested governments could require minimum data be stored by industry and made accessible to government in the event of an incident for the purposes of investigation and perhaps to assign liability. When technology permits, this data might be available for real-time roadside enforcement.
• NSW Government and Queensland TMR also considered it desirable that some commercially collected data be provided to governments for the purposes of updating and maintaining public infrastructure.
• NZ Ministry of Transport stated that privacy is an area of considerable uncertainty, as outcomes will depend on how the technology is ultimately deployed.
• ConnectEast suggested that privacy challenges will depend on whether there are changing purposes for which the data is collected, and noted that private road operators collect data for tolling purposes that are already covered by privacy regulation and shared with enforcement as requested. Legislation or codes would need to take any new collection purpose, such as congestion charging, into account.
• AAA, ANCAP and IAG raised their concerns about a lack of protection of motorists’ rights and the potential for preventing, limiting or restricting consumers from accessing their vehicle data, thereby inhibiting third parties from supplying services to consumers. The AAA recommended that the Australian Government investigate current legislative ability to address the restriction of vehicle data. If necessary, the review
CLA
RIFY
TH
EN
REFIN
E

112Regulatory options for automated vehicles
should recommend an amendment to consumer laws to ensure that consumers have access to and control of their vehicle data.
IAG submitted that the review should address vehicle and consumer data management, ownership and privacy in a global context. This issue will not only affect consumers’ privacy, but also the business models of manufacturers, repairers, mechanics and insurers as they utilise vehicle and driver data to provide services to consumers such as in-vehicle telematics, usage-based insurance, vehicle servicing and repair, roadside assistance, and other services that may emerge over time.
• ATA recommended that the NTC review the Australian Law Reform Commission’s Final Report on Traditional Rights and Freedoms – Encroachments by Commonwealth Laws and ensure that no future laws, amendments or regulation for more automated vehicles would encroach upon the legal rights and individual freedoms, privacy and privileges of the citizen.
• ARRB noted a number of privacy, legal and ethical issues related to the collecting data that identifies drivers and passengers, that records incriminating evidence and that can be accessed by police.
• Truck Industry Council stated that government access to automated vehicle data may warrant additional legislative privacy protections. Regulations should clearly define what data can be collected by government, vehicle manufactures and others. Examples of permitted data access may include governments having access to vehicle location for the purpose of road user charges, and at other times enforcement agencies would not have rights to access this data. Unique regulations in Australia should not slow or stall the introduction of the technology.
• Dr Hussein Dia recommended (1) that legislation should ensure informed consent on access to a car’s data; (2) that drivers should have the right to choose their preferred service provider and match the right products and level of service to their needs; and 3) a variety of service providers should have the right to develop products and functionalities for car data, ensuring fair competition in an open market place.
• ADVI submitted that the capture, storage and use of otherwise private data associated with the operation of automated vehicles will pose privacy concerns. These will include the extent to which governments wish to access, store and utilise data captured by vehicles, whether governments wish to outsource such a function, and third parties’ rights to access data.
OptionsThe NTC is seeking feedback on how governments should support privacy protections for automated vehicle users, and regulate access to vehicle data for commercial purposes.
• Option 1: continue current approach – regulate privacy protection through Australian Privacy Principles and state-based Information Privacy Principles, or
• Option 2: Option 1, plus governments and industry develop best-practice guidance for automated vehicles, or
• Option 3: governments legislate access to automated vehicle data, including identifiable location information.
We also welcome feedback on alternative options or an approach that incorporates elements of the options discussed here.
Option 1: continue current approach – regulate privacy protection through Australian Privacy Principles and state-based Information Privacy Principles
Adopting this option, industry and governments would use existing privacy principles and surveillance laws to manage privacy risks. Existing privacy principles are well established
CLA
RIFY
TH
EN
REFIN
E

113Discussion paper
and have already been applied to a wide range of technologies and sectors. These principles could readily be applied to automated vehicles, with industry and governments managing their respective risks.
Within the current regulatory framework, privacy impact assessments (PIA) can be used by industry and governments as a tool to help manage privacy impacts and can assist organisations to design systems to minimise the transaction of personal information as much as possible. While not required under the Privacy Act 1988, a PIA enables organisations to map the flow of personal information and to assess the extent to which a proposed system is compliant with the privacy principles. Where there are potential privacy impacts, a PIA can recommend potential solutions.
Benefits of the current approach:
• flexible, principles-based approach that can manage privacy proportionate to the consequence, likelihood and impact of the privacy risk.
Disadvantages of the current approach:
• could result in inconsistent treatment of personal information across different organisations
• not every jurisdiction in Australia has legislated protections. Western Australia and South Australia do not have legislated privacy regimes and Queensland does not have surveillance device legislation
• would not cover exemptions (such as small businesses) and enforcement activities
• may be inadequate to address industry issues relating to commercial access to vehicle data.
Option 2: governments and industry develop best-practice guidance for automated vehicles
Adopting this option, governments and industry would collaborate to develop best-practice guidance to manage personal information generated by automated vehicles. Guidance material could be developed with advice from privacy commissioners and take into consideration the management of CAM and DENM data messages in addition to personal information transactions within the broader operating system. Guidance material could also address access to vehicle data by private organisations for commercial purposes, such as repair and modification.
Best-practice guidance is a flexible approach that could be tailored to specific sectors or functions, such as manufacturers, service providers and enforcement agencies, and could include guidance on appropriate handling, informing consumers and systems design. Best-practice guidance could also factor in C-ITS and other forms of communication that could be used by automated vehicles.
Like Option 1, best-practice guidance could encourage organisations developing automated vehicle technology or operating systems to undertake a PIA to assess the privacy risks of technology and systems options.
Guidance could take the form of a privacy code, registered by an industry group with a privacy commissioner. A privacy code can exempt parties from a particular element of the privacy principles, or ensure that parties otherwise exempt from the Australian Privacy Principles, such as small businesses and state agencies, could voluntarily agree to a common approach. A privacy code could also provide a framework to enable industry to agree to common protections and processes.
CLA
RIFY
TH
EN
REFIN
E

114Regulatory options for automated vehicles
Benefits of best-practice guidance:
• reduces likelihood of inconsistent treatment of personal information across different organisations
• can reflect international best-practice (where consistent with the Australian Privacy Principles)
• can address both government and commercial access to data.
Disadvantages of best-practice guidance:
• organisations (including government agencies) would not be bound by guidance material
• guidance material does not provide an implementation path or structure to oversee progress.
Option 3: governments legislate access to automated vehicle data, including identifiable location information
Adopting this option, nationally-consistent legislation would regulate the access and use of personal information generated by automated vehicles. There are a number of precedents for this approach: tolling legislation in Victoria (CityLink) and the Intelligent Access Program (IAP) for heavy vehicles are examples where governments have set in legislation privacy protections for technology-based schemes that collect the location data of a large number of vehicles in real time. The approach adopted by the then Standing Council on Transport and Infrastructure, described above (in the section titled “Government access to personal information”), provides another example. The additional privacy protections largely relate to the circumstances in which third-party entities, such as enforcement agencies, can access the personal information.
A similar approach has been adopted in the HVNL which provides that enforcement agencies can only access personal information contained in an electronic work diary (EWD) if it is for a defined purpose – that is, compliance with heavy vehicle driver fatigue provisions. Otherwise, all enforcement agencies must attain a judicial warrant to access that information. This approach recognises the sensitive nature of highly accurate location information that can be directly attributed to an identifiable driver.
A legislative approach could include both commercial organisations and government agencies. In addition to regulating access to personal information, a legislative regime could also have regard to technical standards (to guarantee systems do not generate personal information in the first instance) or to governance arrangements (to guarantee that data cannot be matched by ensuring that different entities hold key data sets in a mutually exclusive manner, such as the separation of location records from vehicle registration records).
From a government perspective, a legislative approach would not have to be restricted to regulating enforcement. Legislation could have regard to regulating government access for a wide range of purposes, including access to data for crash analysis purposes, to improve infrastructure or to measure network performance.
Benefits of legislating access to automated vehicle personal information:
• highest level of certainty for consumers, industry and government agencies
• highest level of protection as it can apply to all government agencies, including police.
Disadvantages of legislating access to automated vehicle personal information:
• less flexible approach that takes longer to agree and make further amendments
• legislation may be required to have regard to specific technologies (such as C-ITS). This has two challenges:
CLA
RIFY
TH
EN
REFIN
E

115Discussion paper
– governments and industry may not seek to regulate the use of these technologies outside of automated vehicles
– different technologies could be used that fall outside the technologies defined in the legislation.
Conclusion Privacy principles may be sufficiently robust to regulate private sector access to personal information generated within automated vehicles, but government access to automated vehicle data, for enforcement, infrastructure or other purposes, may warrant additional legislative privacy protections.
The privacy risks of automated vehicles will primarily depend on the technologies adopted and the extent to which automated vehicles generate personal information. Therefore, while legislative controls on the use and access to automated vehicle personal information by governments may be warranted in the longer term, until the privacy risks are better known the current application of privacy and surveillance laws should sufficiently protect consumers’ privacy.
For these reasons, the NTC supports option 1.
Question 9: Do you agree that personal information generated by automated vehicles should continue to be regulated by privacy principles and with no additional legislative controls at this time? If not, why?
CLA
RIFY
TH
EN
REFIN
E

116Regulatory options for automated vehicles
Timing of reforms
Depending on the decisions of ministers, the NTC will work with jurisdictions and industry to ensure that Australia adopts adaptive regulations that are designed to evolve with the technology. To ensure that regulations are not based on outdated technology or introduced before the safety performance and risks of different automated vehicle applications are known, a staged approach to reform is recommended.
The timing and sequencing of each reform is a key issue. The timing of reforms proposed in this paper is based on stakeholder feedback to the issues paper and an analysis of market trends.
As we outlined in Chapter 1, we do not yet know the order in which different applications of automated driving will be commercialised. Market deployment of automated vehicles will be subject to the development of technology and adoption by the market. It is also noted that the SAE International Standard J3016 on levels of automated driving is not indicative of commercial deployment and some highly automated vehicles – such as the Navya passenger shuttle to be trialled in Perth – are designed to operate in a driving environment that has relatively low complexity and could be deployed relatively soon.
In broad terms, many of the regulatory barriers – such as the definition of driver in the road rules – can be managed through existing exemption processes until there is large-scale commercial deployment. The issues that should be prioritised in the near-term relate to supporting on-road trials and clarifying the meaning of control and proper control, because the market is preparing to undertake trials from 2016 and to deploy vehicles with conditional automation by 2020.
It should be noted that national reforms can take a number of years to develop, agree and implement. For this reason, there is a time interval in the proposed timeframes, so that if we wish to see a national reform implemented by 2020, we recommend commencing the process of reform by 2017. The timing will depend on the complexity of the reforms and whether they are changes to legislation, guidelines or other polices.
Governments should also be sufficiently agile to prepare to accelerate reform timeframes should disruptive technologies become commercially deployed faster than what industry has told us to date. The proposed reforms do not lock Australia into any technology path and should provide sufficient flexibility for a variety of applications.
13 Key points
• The timing and sequencing of each reform is a key issue.
• Many of the regulatory barriers can be managed through existing exemption processes until there is large-scale commercial deployment of highly automated vehicles. The issues that should be prioritised in the near-term relate to supporting on-road trials and clarifying the meaning of control and proper control, because the market is preparing to undertake trials from 2016 and to deploy vehicles with conditional automation by 2020.

117Discussion paper
Near-term reforms The NTC proposes that the following reforms should be addressed in the near-term and work should commence as soon as possible:
1. Develop national guidelines to support a consistent approach to on-road trials
Rationale for timing:
• industry stakeholders have told us that on-road trials are integral to further commercial deployment of more highly automated vehicles
• on-road trials of automated vehicles are already being planned in different jurisdictions, and road agencies are already considering how they will support trials and what trial conditions they will seek from applicants.
2. Governments develop national enforcement guidelines that clarify the meaning of control and proper control
Rationale for timing:
• the greatest uncertainty around control will relate to vehicles that have conditional automation. This is because a vehicle that has conditional automation still requires a human to monitor the driving system and to be the fallback for the dynamic driving task. Industry has told us that use cases with conditional automation, such as automated highway driving and automated valet parking, could be deployed within the next three to five years
• resolving the meaning of control and proper control is a baseline requirement. This reform should clarify legal responsibility for the vehicle, and therefore help address enforcement and liability issues. It is unlikely that enforcement and liability complexities can be adequately resolved before the meaning of control and proper control is addressed.
Medium-term reform The NTC proposes that the following reforms should be addressed in the medium-term and work should commence within two years:
3. Governments implement a safety assurance framework to oversee the deployment of automated vehicles that do not require a human driver, in conjunction with removing legal barriers
Rationale for timing:
• a safety assurance framework – such as a licence to operate as an automated driving system entity – may be required for automated vehicles that operate without a human driver in control some of the time or all of the time
• development of a safety assurance framework is a baseline requirement, because the safety assurance framework would need to be established before any of the legal barriers identified in this paper can be removed
• establishing a safety assurance framework in the medium-term will prepare Australia for highly and fully automated vehicles in the longer term. It will also support vehicles that have conditional automation, if it is agreed that such vehicles share control between a human driver and an automated driving system entity.

118Regulatory options for automated vehicles
4. Governments expand the meaning of driver in relevant legislation
Rationale for timing:
• amending legislation to redefine the meaning of driver would be a significant national reform process that could potentially extend to a range of legislative regimes, including the road rules, road safety and traffic laws, dangerous goods laws, the HVNL, tolling, compulsory third-party compensation insurance and criminal law
• it is important that sufficient time is provided to undertake these reforms to accommodate automated vehicles that do not have a human driver, or vehicles that share control and responsibility between a human driver and an automated driving system. On the other hand, it is important that reforms are not undertaken too soon, before the development of a safety assurance framework and before the maturity of the technology.
5. Governments further investigate options to interact with automated vehicles as the technology and market develops
Rationale for timing:
• the automated vehicle market and technology has not yet sufficiently matured to determine the best approach for government agency interaction with automated vehicles. If technology interfaces were developed before the development and commercial deployment of the vehicles, there is a high risk that the interface will become redundant or outdated. On the other hand, governments need to be agile to ensure that interfaces are developed in a timely manner once highly automated vehicles are, or soon-to-be, commercially deployed.
Longer-term reform The NTC proposes that the following reform should be addressed in the longer-term and work should commence within three to five years:
6. Adopt new ADRs for automated vehicles in step with the development of international standards
Rationale for timing:
• it will be many years before the introduction of highly or fully automated vehicles that have no human driver and are not required to meet current vehicle standards, such as a steering column and brake pedals
• low-speed passenger shuttle vehicles with no human drivers are soon to be trialled in Australia and could be deployed sooner than other highly automated vehicles, but they are likely to have limited and defined operation on the network and could operate under the current exemption framework for some time to come
• the timing of this reform is indicative and will depend on the development of international standards. However, the likelihood of large-scale commercial deployment of highly and fully automated vehicles that do not require a human driver is not anticipated for a number of years. If this assumption is correct, it is most likely that the continued use of the current exemption process is the most suitable approach at this time.

119Discussion paper
Clarify then refine The NTC proposes that reforms relating to vehicle modification, liability and privacy can commence now, but should be monitored and refined over time. The extent to which vehicle modification, liability and privacy issues are potential risks will depend on the development of the technology. For example, vehicle modification will be less of an issue if vehicles have built-in redundancy, and privacy will not be an issue if automated vehicles do not generate personal information. It is therefore appropriate that these issues should be clarified now, but refined once the risks can be better evaluated.
Question 12: Do you agree with the staged approach to reform and the suggested timeframes to address the identified issues? If not, why?

120Regulatory options for automated vehicles
Glossary TERM OR TITLE ACRONYM DESCRIPTION
Australian Competition and Consumer Commission
ACCC Competition regulator and national consumer law champion for Australia. Promotes competition, fair trading and regulation of national infrastructure.
Australian Design Rules
ADRs National standards for safety, anti-theft and emissions in vehicle design.
Australian Privacy Principles
APPs Standards for how Commonwealth agencies, private sector and not-for-profit organisations must handle, use and manage personal information.
Australian Road Rules
- Model road rules developed by the NTC and applied in state and territory legislation.
Austroads - The association of Australasian road transport and traffic agencies.
automated driving system
- In-vehicle operating system that controls the automated vehicle functions.
automated driving system entity
- The legal entity responsible for the automated driving system.
automated highway driving
- A system that takes control of driving and monitoring road environment on specific roads, but the driver monitors the automated driving system.
auto parking assist
- The vehicle self-parks, but the driver must monitor the environment during the automation mode and be ready to intervene if required.
conditionally automated
- An automated vehicle where the system drives the vehicle for sustained periods of time, but the human driver must continue to monitor the automated driving system and be to be the fallback for the dynamic driving task.
Cooperative Intelligent Transport Systems
C-ITS The use of wireless communications to exchange data between vehicles, and with roadside infrastructure, including data on vehicle movements, traffic signs and road conditions.
Declaration of Amsterdam
- An agreement signed in 2016 by transport ministers of the 28 European Union member states on cooperation in the field of connected and automated driving.

121Discussion paper
electronic work diary
EWD An electronic device or system to monitor and record the work and rest times of a commercial driver.
fully automated - An automated vehicle where all aspects of the driving task and monitoring of the driving environment and the dynamic driving task are undertaken by the vehicle system. The vehicle can operate on all roads at all times.
Global Navigation Satellite System
GNSS System that provides geospatial positioning based on longitudinal, latitudinal and altitudinal data.
highly automated - An automated vehicle where the system drives the vehicle for sustained periods of time in some situations, or all of the time in defined places, and no human driver is required to monitor the driving environment and the driving task, or intervene, when the system is driving the vehicle.
highway driving assist
- Technology that allows a vehicle to maintain an appropriate speed, safe distance to other vehicles and lane position
human-machine interface
HMI Interface between a human operator and a machine. Includes functional and ergonomic design of the interface (human factors).
Information Privacy Principles
IPPs State privacy principles regulating public sector accesses to and handling of personal information.
International Organization of Motor Vehicle Manufacturers
OICA International membership body for automotive manufacturers.
National Highway Traffic Safety Administration
NHTSA United States agency that directs motor vehicle and highway safety and consumer programs.
National Transport Commission
NTC Independent statutory body that contributes to the achievement of national transport policy objectives by developing regulatory and operational reform of road, rail and intermodal transport.
Office of the National Rail Safety Regulator
ONRSR National rail safety regulator.
partially automated
- An automated vehicle where the automated driving system may take control of steering, acceleration and braking in defined circumstances, but the human driver must continue to monitor the driving environment and the driving task, and intervene if required.

122Regulatory options for automated vehicles
platooning - Platooning allows vehicles to travel close together by accelerating or braking simultaneously and enables a closer headway between vehicles by reducing human driver reaction times.
Society of Automotive Engineers
SAE International association for automotive engineers.
The United Nations Economic Commission for Europe
UNECE Organisation promoting pan-European economic integration. Brings together 56 countries from Europe, Central Asia and North America to work together on economic and sectoral issues.
Transport and Infrastructure Council
- Group comprising of Commonwealth, State, Territory and New Zealand Ministers with responsibility for transport and infrastructure issues, as well as the Australian Local Government Association.
use case - Method to classify different automated vehicles based on specific applications or functions, such as auto parking assist, automated highway driving or truck platooning.
Vienna Convention on Road Traffic
- International treaty on road traffic signed in 1968 designed to facilitate cross-national road traffic standards.
World Forum for Harmonization of Vehicle Regulations
WP.29 International regulatory forum within the institutional framework of the UNECE Inland Transport Committee.

123Discussion paper
Submissions to the NTC issues paper (2016)
NAME OF ORGANISATION DESCRIPTION
Anonymous (3) -
Australasian New Car Assessment Program (ANCAP)
Independent vehicle safety advocate
Australian Driverless Vehicle Initiative (ADVI)
Initiative led by ARRB to support deployment of automated vehicles in Australia. Members include vehicle insurers
Australian Road Research Board (ARRB)
Road transport research organisation
Australian Trucking Association National peak body for the Australian trucking industry
Australian Automobile Association (AAA)
National peak body for Australia’s motoring clubs
ConnectEast Private tollway company
Department of Planning, Planning and Infrastructure (DPTI)
Department of the Government of South Australia
Department of State Growth Department of the Tasmanian Government
Department of Transport Northern Territory
Department of the Government of the Northern Territory
Federal Chamber of Automotive Industries (FCAI)
National peak body for manufacturers and importers of light vehicles sand motorcycles
Gas Energy Australia National peak body representing the downstream gas industry
George Institute Medical research institute for global health
Griffith Law School Law School of Griffith University, Queensland, Australia
IAG Limited Insurer
Insurance Council of Australia National peak body for the general insurance industry
Law Society of NSW Professional association for NSW solicitors and lawyers
Law Society of South Australia Professional association for SA solicitors and lawyers

124Regulatory options for automated vehicles
Law Institute of Victoria Professional association for Victorian solicitors and lawyers
Main Roads Western Australia Department of the Government of Western Australia
Motorcycle Council of New South Wales
Council for NSW motorcycle clubs, associations and ride groups
New South Wales Police Police agency of New South Wales
New Zealand Ministry of Transport
Department of the New Zealand Government
Queensland TMR Department of Transport and Main Roads in Queensland
Mr Richard Tooth Personal submission
South Australia Police Police agency of South Australia
Dr Hussein Dia Swinburne University, Centre for Sustainable Infrastructure
Toll Group Freight and logistics operator
Transport for New South Wales Department of the New South Wales Government
Truck Industry Council Peak body for heavy vehicle manufacturers and distributors
Victoria Police Police agency of Victoria
Warren Centre University of Sydney research institute

125Discussion paper
References Anderson, James M., Nidhi Kalra, Karlyn D. Stanley, Paul Sorensen, Constantine Samaras and Oluwatobi A. Oluwatola, 2016, Autonomous Vehicle Technology: A Guide for Policymakers, Santa Monica.
Australian Government, 2010, Best Practices Regulation Handbook, Canberra.
Brown, I., 1986. Functional requirements for driving. Paper presented to the Berzelius Symposium on Cars and Casulaties, Stolkholm.
California Department of Motor Vehicles, 2015, Summary of Draft Autonomous Vehicles Deployment Regulations, Sacramento.
Department for Transport, 2015, The pathway to driverless cars: a detailed review of regulations for automated vehicle technologies, London.
Department for Transport, 2015, The pathway to driverless cars: Code of practice for testing of automated vehicle technologies, London.
Department of Prime Minister and Cabinet, 2014, The Australian Government Guide to Regulation, Canberra.
European Commission, 2016, C-ITS Platform Final Report, Brussels.
European Council, 2016, Declaration of Amersterdam: Cooperation in the field of connected and automated driving, Amsterdam.
Federal Chamber of Automotive Industries, 2015, Voluntary Code of Practice for Access to Service and Repair Information for Motor Vehicles, Canberra.
Glancy, D.J., R.W. Peterson, and K.F. Graham. 2015. A Look at the Legal Environment for Driverless Vehicles, pre-publication draft of NCHRP Legal Research Digest 69, Transportation Research Board, Washington D.C.
Kalra, Nidhi and Susan M. Paddock, 2016, Driving to safety: How many miles would it take to demonstarte autonomous vehicle reliability?, Santa Monica.
KPMG, 2015, Automobile insurance in the era of autonomous vehicles, Radnor.
Main Roads Western Australia, 2014, Automated Vehicles: Are we ready?, Perth.
National Highway Traffic Safety Administration (NHTSA), 2013, Preliminary Statement of Policy Concerning Automated Vehicles, Washington.
National Highway Traffic Safety Administration (NHTSA), 2016, Google – complied response to 12 Nov 15 intrepreation request, Washington.
National Transport Commission, 2016, Regulatory barriers to more automated road and rail vehicles: issues paper, Melbourne.

126Regulatory options for automated vehicles
National Transport Commission, 2013, Cooperative Intelligent Transport Systems: Final policy paper, Melbourne.
National Transport Commission, 2012, Cooperative ITS Regulatory Policy Issues: Discussion paper, Melbourne.
Office of the Australian Information Commissioner, 2014, Australian Privacy Principles, Sydney.
Urmson, Chris, 2016, Testimony before the Senate Committee on Commerce, Science and Technology Hearing: Hands Off: The Future of Self-Driving Cars, Washington.
Victorian Law Reform Commission, 2010, Surveillance in Public Places, Final Report 18, Melbourne.
Wagner, J., Baker, T., Goodin, G., & Maddox, J., 2014, Automated Vehicles: Policy Implications Scoping Study, A&M Transportation Institute, Texas.

127Regulatory options for automated vehicles