distributed embedded systems - kth · distributed embedded systems - characteristics, ... auxiliary...
TRANSCRIPT
1
1 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Distributed embedded systems - characteristics, examples,
trends and challenges
Martin Törngren
Embedded Control Systems group
Mechatronics KTH
2 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Outline
• Recap – why, what and how of distributed systems Characteristics, Advantages, Problems
• Design issues for distributed embedded
systems • Systems and application examples • Trends and research
2
3 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Trailer
7-pole15-pole
AUS
Audio system
ACC
Automatic climate control
WTA
Auxiliary heater system water-to-air
CTS Clock and timer system
CSS
Crash safety system
ACS 2
Articulation control system
BMS
Brake management system
GMS Gearbox management system
EMS1 Engine management system
COO1 Coordinator system
BWS
Body work system
APS
Air prosessing system
VIS 1
Visibility system
TCO
Tachograph system
ICL1
Instrument cluster system
AWD
All wheel drive system
BCS2
Body chassis system
LAS
Locking and alarm system
SMS
Suspension management
t
SMSSuspensionmanagement system
RTG Road transport informatics gateway
RTI Road transport informatics system
EEC Exhaust Emission Control
SMD
Suspension management dolly
t
SMSSuspensionmanagement system
ATA
Auxiliary heater system air-to-air
Green bus
Red bus
Yellow bus
ISO11992/3
ISO11992/2
Diagnostic bus
Body Builder Bus
Body Builder Truck
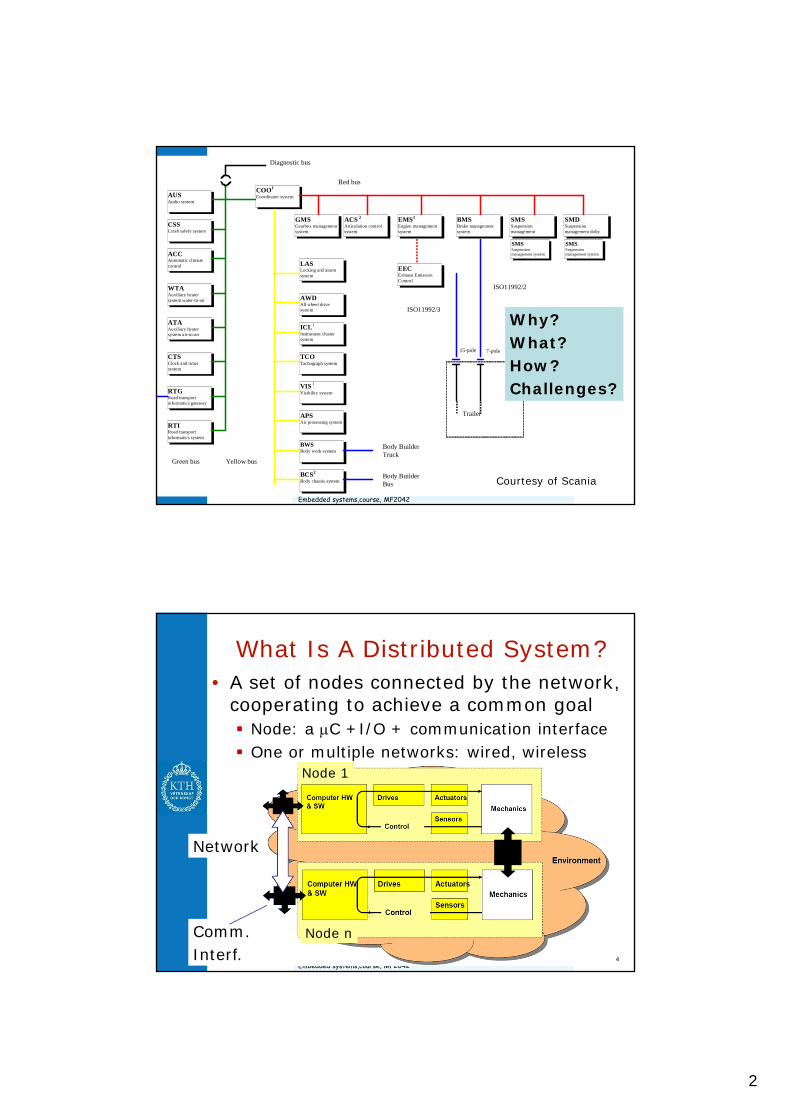
Courtesy of Scania
Why? What? How? Challenges?
4 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
What Is A Distributed System? • A set of nodes connected by the network,
cooperating to achieve a common goal Node: a C +I/O + communication interface One or multiple networks: wired, wireless
Comm. Interf.
Node 1
Node n
Network

3
5 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Analogy
• Setup phase: Communication model/pattern Physical level; logical level; reliability Broadcast vs. Point-to-point mode
• Design and implementation Functions ~ the phrases
oAllocated to hardware elements – ”nodes” Timing and global clock Access to the same com. network/scheduling Application control logic - centralized
6 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Communication models
OSI model oriented RT model General purpose Dedicated Little apriori knowledge Often static Point to point Multicast
logical connection Sender & receiver Source
addressing addressing Positive ack Datagram
retransmission E.g. TCP/IP! E.g. CAN!

4
7 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
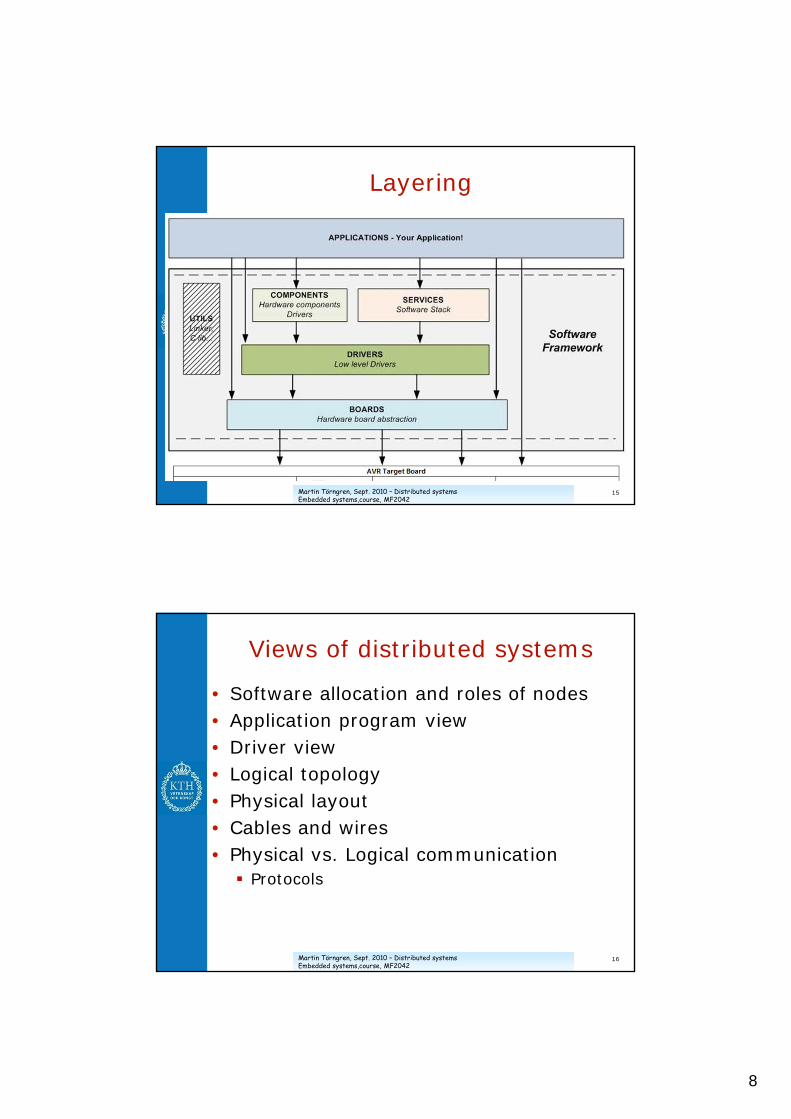
Views of distributed systems
• Software allocation and roles of nodes • Application program view • Driver view • Logical topology • Physical layout • Cables and wires • Physical vs. Logical communication Protocols
8 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
The mapping problem Vehicle stability DiagnosticsSuspension Driver in the loop
Sensor Actuator Sensor Sensor Actuator
Local control function
Local control function
Sensor(s)
Actuator(s)
Signal cond.
Drive unitComputerhardware&software
Sensor(s)
Actuator(s)
Signal cond.
Drive unitComputerhardware&software
Sensor(s)
Actuator(s)
Signal cond.
Drive unitcircuitryComputer
hardwareandsoftware
GatewayVehicleMechanics

5
9 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Application programmer view
msg[0]=0; ... msg[6]=0; msg[7]=50; CANSendMsg( 0, 0x0cfe6cee, msg, 8, 0 ); delay_ms(1000); dip204_clear_display(); …
10 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Driver view illustrated through Coldfire CAN
Courtesy of Freescale
6
11 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
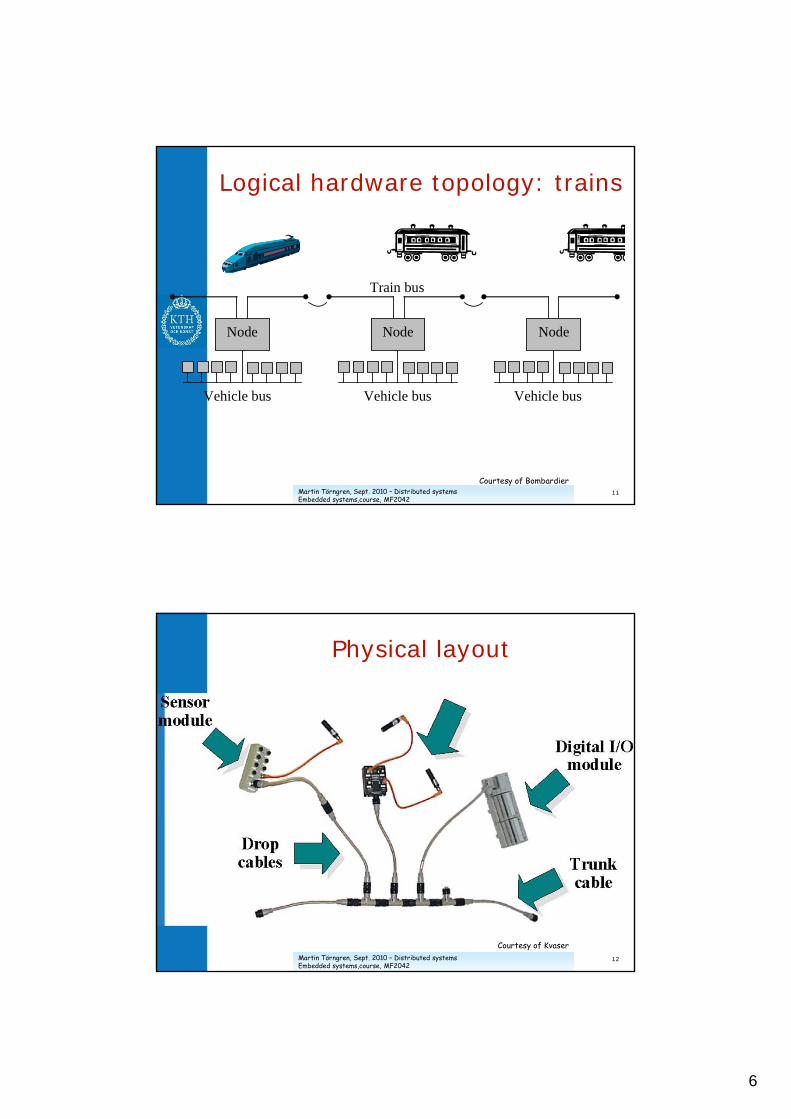
Logical hardware topology: trains
Node Node Node
Vehicle bus Vehicle bus Vehicle bus
Train bus
Courtesy of Bombardier
12 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Physical layout
Courtesy of Kvaser
7
13 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
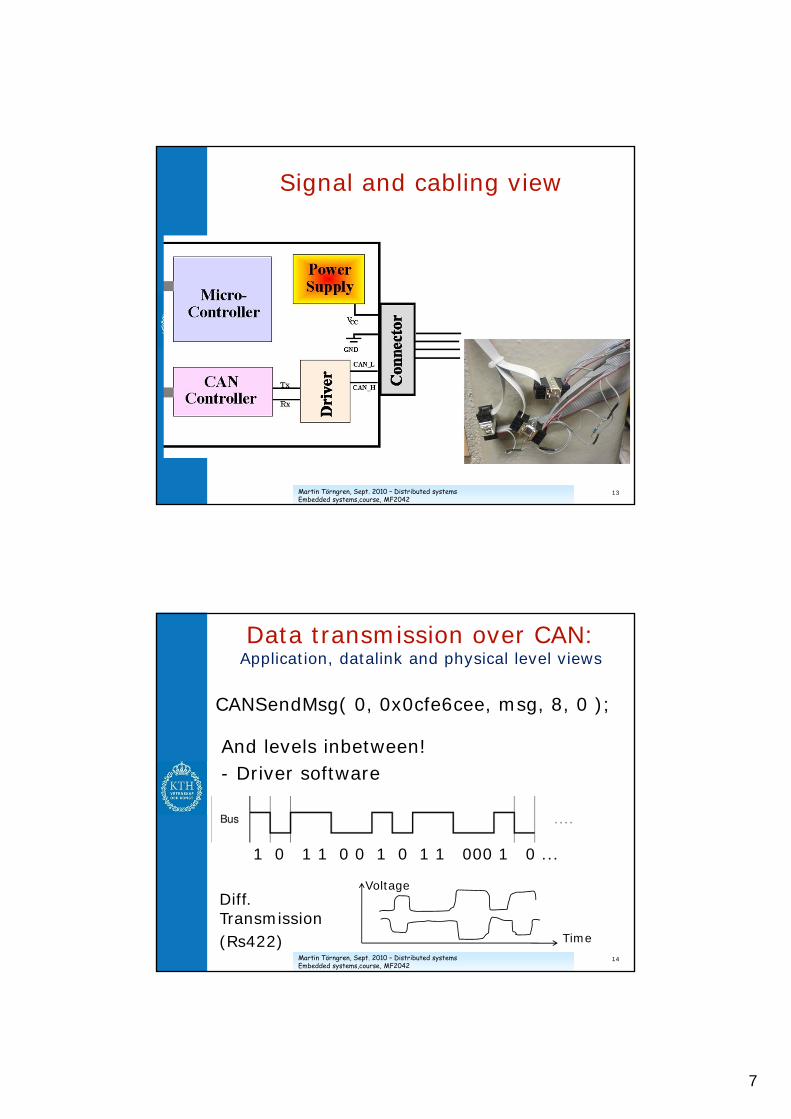
Signal and cabling view
14 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Data transmission over CAN: Application, datalink and physical level views
And levels inbetween! - Driver software
1 0 1 1 0 0 1 0 1 1 000 1 0 ...
Diff. Transmission (Rs422)
Voltage
Time
CANSendMsg( 0, 0x0cfe6cee, msg, 8, 0 );
8
15 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Layering
16 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Views of distributed systems
• Software allocation and roles of nodes • Application program view • Driver view • Logical topology • Physical layout • Cables and wires • Physical vs. Logical communication Protocols

9
17 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Why distributed systems?
18 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Why not Analog Cabling? • Traditional method: a C is connected to
distributed sensors and actuators by dedicated analog cables
• An example: 1900 wires, 2.2km long

10
19 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Reducing Cables with Network • Digital signals – robustness against noise
• Increase data integrity • Reduce the cost of cables, connectors • Increase system reliability (fewer
connectors) • Shared resources and information:
• Sensors, actuators, computations, … • Modularity • Performance • Local intelligence
20 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
A Mechatronic Module • Scania diesel engine and controller
Interfaces: - Mechanical Connections - CAN

11
21 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Many advantages!!! What are the problems???
• (partial) failures • Delays • Consistency • Organizational challenges • How to deal with distributed functions? • How to verify?
22 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Distributed systems – failure modes
Nodes • Omission
Fail-silent Signalled failure
• Value Wrong data sent
• Timing E.g. too early, too late
• Interference ”Babbling idiot”
• Commission Unintended message
Network • Omission
Transient or permanent Permanent failure –
special case: Network becomes partitioned!
• Value Alteration of value
• Timing • Network failure causes
delay/different delays
• Interference • Commission
Attributes: Duration, Detectability, Symmetry

12
23 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Distributed state variables, {M1, M2, M3} => the system state; is it consistent?
Sensor(s)
Actuator(s)
Computerhardwareandsoftware
Signalconditioning
DrivecircuitryMessage M’
Com.controller
Sensor(s)
Actuator(s)
Computerhardwareandsoftware
Signalconditioning
Drivecircuitry
Com.controller
Sensor(s)
Actuator(s)Computerhardwareandsoftware
Signalconditioning
Drivecircuitry
Com.controller
M1
M2
M3
When is the state required to be consistent? Consistency in the precense of faults? Trade-offs --> compare voice vs. file transfer!
24 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Time delays in distributed systems
Application
Access Control
Comm. Interf.
Application
Access Control
Comm. Interf.
prep., send
wait
decode, retrieve
transmission
Sending Node Receiving Node

13
25 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Delays and event ordering • Incorrect event order possible
meas.& calculate
1ms cooling
fan
0.9ms Network
HMI Valve A Valve B
Open both
Close both
0,5 ms
26 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Clock synchronization Perfect clock
Reference time
Clock value
Clock x
Accuracy
Clock synchronization -Establishing an approximate global time within a system -Internal clock synchronization -> precision of the global clock Master/slave vs. distributed clock synchronization - Synchronization to an external time reference
Local unsynchronized clocks: - Granularity - Drift rate, e.g. 10-7s/s - Clock drift rate ~ temp. & voltage applied to the crystal resonator Free running clocks will drift apart
14
27 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
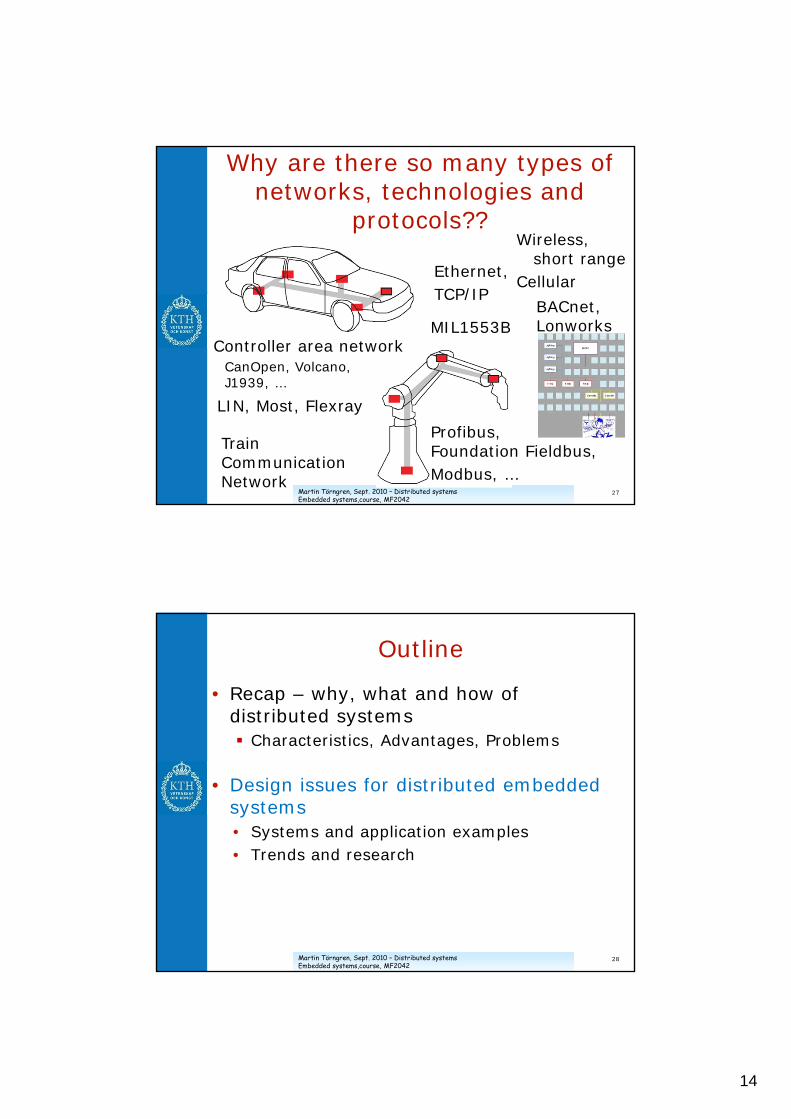
Why are there so many types of networks, technologies and
protocols??
Controller area network
Ethernet, TCP/IP
Profibus, Foundation Fieldbus, Modbus, …
CanOpen, Volcano, J1939, …
MIL1553B
LIN, Most, Flexray
BACnet, Lonworks
Train Communication Network
Wireless, short range Cellular
28 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Outline
• Recap – why, what and how of distributed systems Characteristics, Advantages, Problems
• Design issues for distributed embedded
systems • Systems and application examples • Trends and research

15
29 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Design issues
• Centralized or distributed system? • Which type of distributed system? Logical topology and physical layout Decentralization of data, programs & control Which communication protocol
• How to design and dimension them? The importance of the system architecture! Cost vs. Reliability vs. Performance vs. ...
Delays, synchronization and failures Verification? Who does what?
30 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Distributed I/O
Output Input
Set Point Generation
Feedback Ctrl Feedback Ctrl Feedback Ctrl Level 1
Level 2
Network
• Common in process control • Additional time-delay in control loop • Care has to be taken to synchronize
sensor inputs and multiple outputs
16
31 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
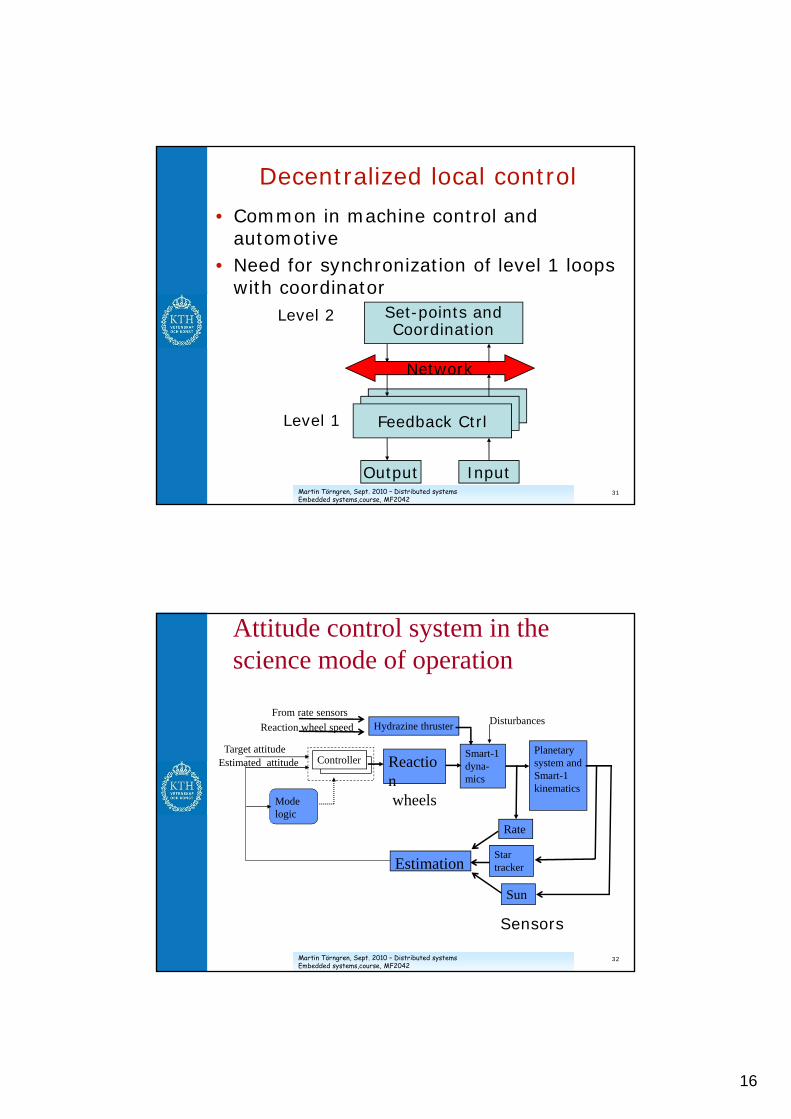
Decentralized local control
Output Input
Feedback Ctrl
Set-points and Coordination
Feedback Ctrl Feedback Ctrl Level 1
Level 2
Network
• Common in machine control and automotive
• Need for synchronization of level 1 loops with coordinator
32 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
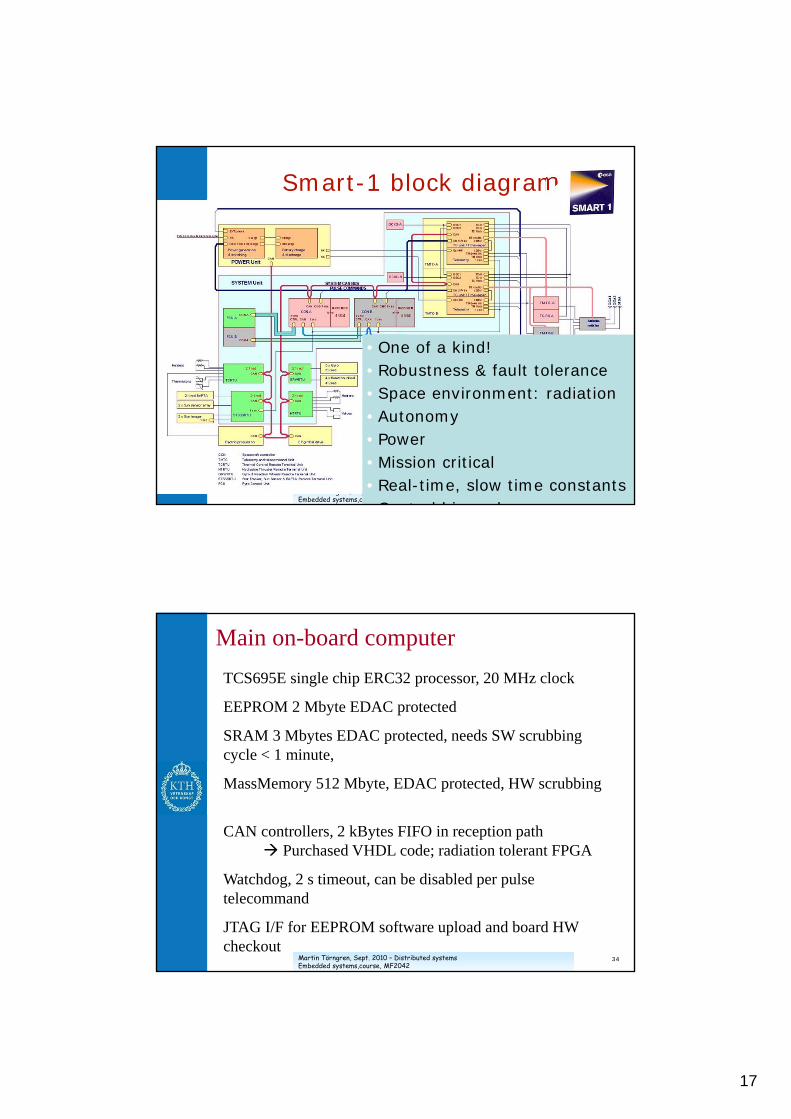
Controller Controller
Mode logic
Target attitude Estimated attitude Reactio
n wheels
Smart-1 dyna- mics
Planetary system and Smart-1 kinematics
Rate
Sun
Disturbances Hydrazine thruster From rate sensors
Reaction wheel speed
Attitude control system in the science mode of operation
Estimation
Sensors
Star tracker
17
33 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Smart-1 block diagram
Courtesy of Swedish Space Corporation
• One of a kind! • Robustness & fault tolerance • Space environment: radiation • Autonomy • Power • Mission critical • Real-time, slow time constants Control hierarchy
34 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
TCS695E single chip ERC32 processor, 20 MHz clock
EEPROM 2 Mbyte EDAC protected
SRAM 3 Mbytes EDAC protected, needs SW scrubbing cycle < 1 minute,
MassMemory 512 Mbyte, EDAC protected, HW scrubbing
CAN controllers, 2 kBytes FIFO in reception path Purchased VHDL code; radiation tolerant FPGA
Watchdog, 2 s timeout, can be disabled per pulse telecommand
JTAG I/F for EEPROM software upload and board HW checkout
Main on-board computer
18
35 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
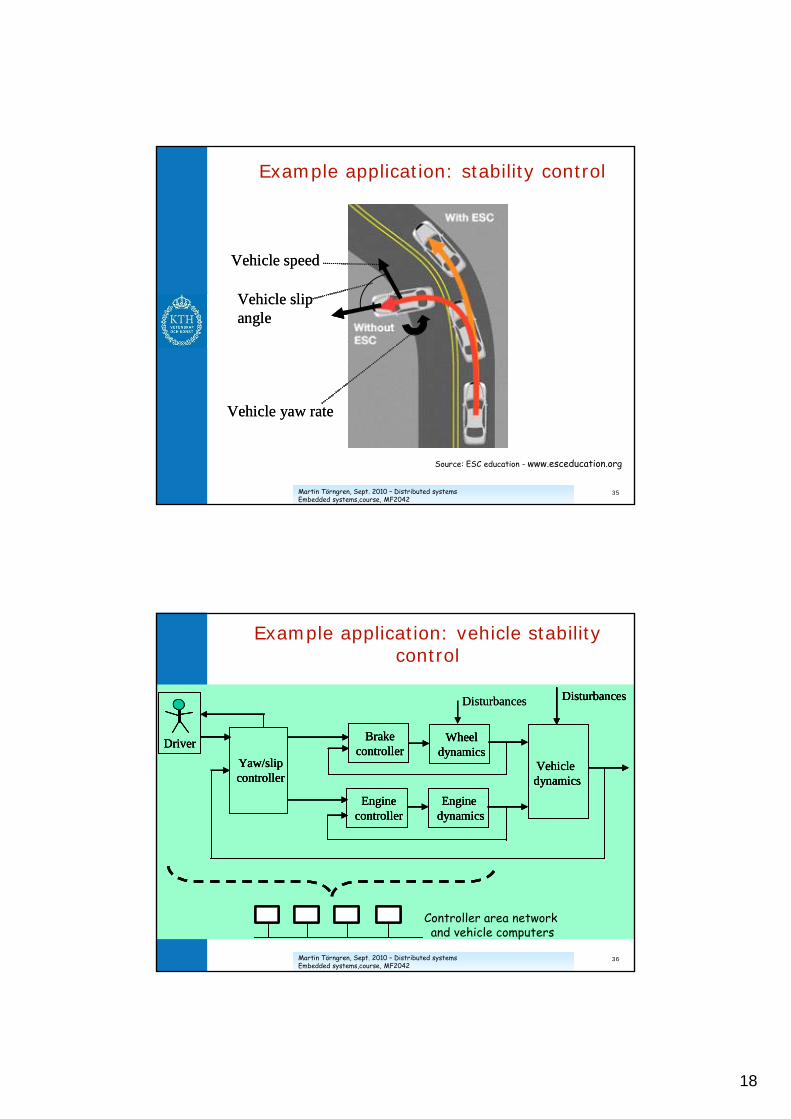
Vehicle yaw rate
Vehicle speed
Vehicle slipangle
Vehicle yaw rate
Vehicle speed
Vehicle slipangle
Example application: stability control
Source: ESC education - www.esceducation.org
36 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Disturbances
Engine dynamics
Vehicledynamics
Wheeldynamics
Enginecontroller
Brakecontroller
Yaw/slipcontroller
Driver
Disturbances Disturbances
Engine dynamics
Vehicledynamics
Wheeldynamics
Enginecontroller
Brakecontroller
Yaw/slipcontroller
Driver
Disturbances
Engine dynamics
Vehicledynamics
Wheeldynamics
Enginecontroller
Brakecontroller
Yaw/slipcontroller
Driver
Disturbances
Controller area network and vehicle computers
Example application: vehicle stability control

19
37 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
A view of a modern car
Courtesy of Volvo Car Which nodes are involved in vehicle stability control?
38 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Distributed systems perspective
• 70’s – Distributed control in process automation
• 80’s – Avionics • 90’s – Automotive • External connectivity and wireless
Telecom; cellular telephony Computer communication; Internet;
TCP/IP, wireless Short range wireless communication;
Bluetooth, Zigbee, ...

20
39 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Trends
• Connectivity • New (distributed) functions • Convergence • Standardized platforms Middleware – for example Autosar Protocols
• Product lines and model-based development Reuse of SW and HW components
• Evolving electronics; multicore
40 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Courtesy of Volvo car

21
41 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Autosar – Automotive SW architecture
Autosar also defines information exchange
42 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Benefits of wireless networking in industrial control
• Cost (wiring and installation)
• Flexibility Less physical design limitations More mobile equipment Faster commissioning and reconfiguration
• Reliability No cable wear and tear No connector failure
Courtesy of Karl-Henrik Johansson
22
43 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
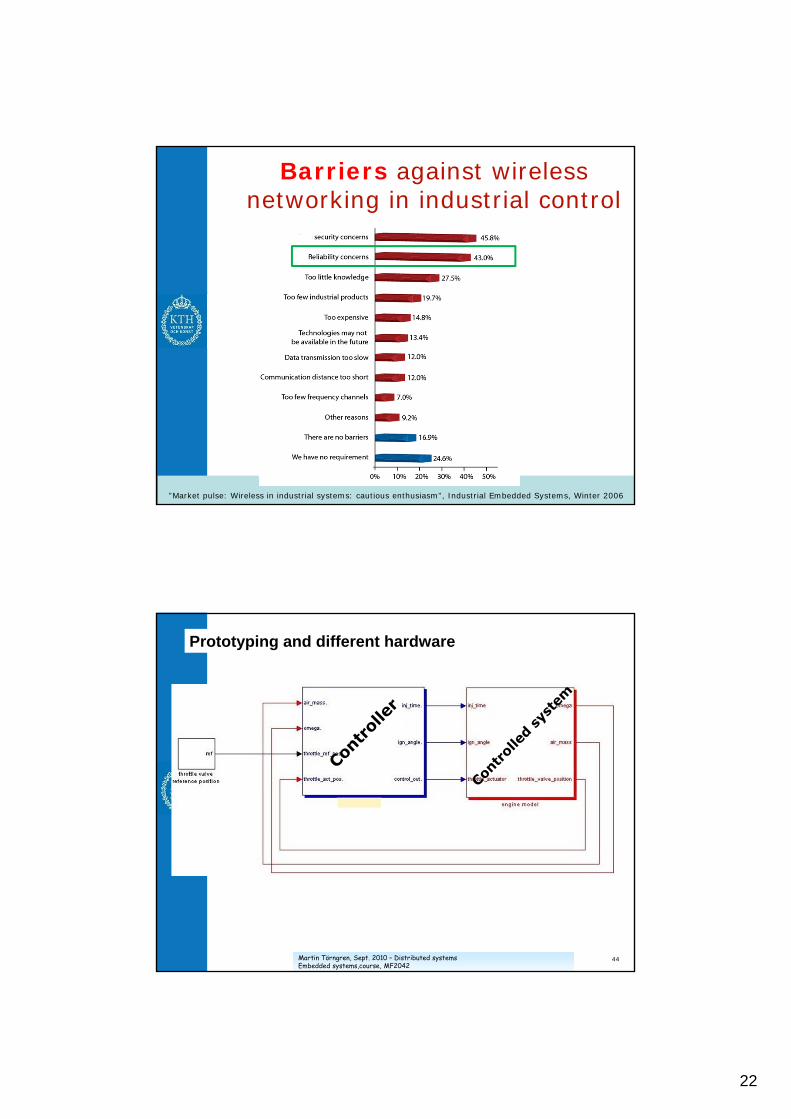
Barriers against wireless networking in industrial control
”Market pulse: Wireless in industrial systems: cautious enthusiasm”, Industrial Embedded Systems, Winter 2006
44 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Prototyping and different hardware

23
45 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Hardware in the loop simulation
ECU
46 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Concept – for a network test Central
unit
I/O-Unit engine
I/O-Unit ESP / xxx
I/O-Unit transmission
Overall model
I/O - program
Driving cockpit
Control computer
customer
24
47 Martin Törngren, Sept. 2010 – Distributed systems Embedded systems,course, MF2042
Summary
• Why, what & how of distributed systems Remember the exercise!
• Design issues for distributed embedded
systems • Architecture and verification
• Dealing with complexity • Trends:
• Increasing connectivity and convergence • Standardization