
ANALYSIS AND SYNTHESIS OF OVERCONSTRAINED MECHANISMS
Dr. Constantinos Mavroidis Professor Bernard RothDepartment of Mechanical EngineeringDepartment of Mechanical Engineering
Massachusetts Institute of Technology Stanford University Cambridge, 02139 MA, USA Stanford, 94305 CA, USA
ABSTRACT
This paper describes how, based on a method originated by Raghavan and Roth and
elaborated by Mavroidis and Roth, a systematic approach is defined in order to obtain and solve
the input-output equations of any overconstrained mechanism. We show that the key to study
overconstrained mechanisms lies in analyzing a certain matrix. We are using this matrix to
prove overconstraint of special structures, obtain the input-output equations of the mechanisms
in analytical form, and solve them algebraically. Applying this unified method of studying
overconstrained mechanisms, we verified overconstraint of all known mobile linkages,
corrected or generalized already established overconstrained conditions and found new
overconstrained mechanisms.
I. INTRODUCTION
Linkages that without satisfying the Kutzbach criterion have full cycle mobility, are
called overconstrained mechanisms. Until now, there is no complete knowledge of all
overconstrained mechanisms and the problem of determining the conditions on the linkage
structural parameters in order to become mobile, keeps fascinating kinematicians as it did during
all this century.
The first overconstrained mechanism was proposed by Sarrus (Sarrus 1853). Since
then a finite number of overconstrained mechanisms have been proposed by various
researchers. In Baker 1984, Waldron 1973, and Phillips 1991, references can be found for
almost all known overconstrained mechanisms. Bennett 1914, Delassus 1922, Bricard 1927,
Myard 1931a,b; Goldberg 1943, Waldron 1968, 1969, Wohlhart 1987, 1991, are the
contributors of the most famous overconstrained mechanisms. A lot of work has been done in
analyzing and studying overconstrained mechanisms and the most important is Baker's
described in many papers (among others his papers of 1980, 1984, 1993.)
In general, overconstrained mechanisms are multi-loop and multi-degree-of-freedom
linkages. The mechanisms proposed in literature are single loop linkages with unity mobility.
It seems that in order to solve the problem of determining all overconstrained mechanisms, first
this problem must be solved for the single loop ones of unity mobility.
Single loop overconstrained mechanisms of unity mobility have either 3, 4, 5 or 6 links
(due to Kutzbach criterion single loop linkages with more than 6 links are mobile). Links are

connected with lower pair joints (i.e. revolute, prismatic, helical, cylindrical, spherical, planar
noted with the letters R, P, H, C, S, E respectively). Waldron 1979, stated that all 4 link
overconstrained mechanisms with lower pairs are determined. The 3 link overconstrained
mechanisms are also determined since they can be considered as a special case of the 4 link
ones. Very few 5 link overconstrained mechanisms are known (Pamidi, Soni and Dukkipati
1973) and only one of them has revolute joints (Myard 1931a,b, and its more general case the
Goldberg mechanisms, Goldberg 1943). The number of known 6-link linkages is also small
containing loops with revolute joints mainly.
Once an overconstrained mechanism is proposed, the problems that the researcher must
face are difficult, independent one another, each one asking for different method of solution.
These problems are:
a) proof of overconstraint. Usually geometric reasoning is used to solve this problem, adapted
to the special geometry of the proposed linkage. The construction of a real model is also
necessary to prove the mobility of the linkage in full cycle. The real model although very
convincing has the disadvantages of restricting the generality of the results since it represents
only a small number of the mechanisms satisfying the overconstrained conditions.
b) calculation and solution of the input-output equations. For many overconstrained
mechanisms this problem was considered independently then problem a). Many times
overconstrained mechanisms were determined without being able to obtain or solve their input-
output equations, which were found later on by another researcher. The input-output equations
of a mechanism are usually obtained by algebraic methods which are different one another and
specialized to the geometry of a particular mechanism. Input-output equations are often very
complicated, presenting difficulties to solve and have more than one solutions. Again, the
existing methods to solve these equations depend on the mechanism studied and usually don't
give all the solutions.
c) existence of other overconstrained mechanisms. Most of the known overconstrained
mechanisms were found by the researcher's geometric intuition and not due to analytical
mathematic methods. In some cases analytic methods were used to reveal overconstrained
mechanisms but they were restricted from the beginning to specialized groups (ex. Waldron
1979, restricted his method to 4 link mechanisms, Lee and Yan 1993, restricted their method to
6R mechanisms with one set of three parallel revolute joints and Pamidi, Soni and Dukkipati
1973 studied 5 link mechanisms only). So every time that a new mechanism was found,
researchers were unable to answer the question of the existence or not of other mechanisms..
The contributions on the study and understanding of overconstrained mechanisms that
this paper is making are:

• In section III, a general method is presented that solves problems a) and b), for any
overconstraint mechanism in a unified way.
• Using this method, overconstraint of all known mechanisms is verified. In the Bricard plane
symmetric linkage and the Waldron hybrid planar or spherical and bennett based mechanisms,
corrections on the already known conditions are done in order to obtain overconstraint. We
found also that for these mechanisms and the line symmetric Bricard mechanisms it is possible
to generalize their overconstrained conditions. These results of ours are presented in section IV.
For every new result, the input-output curves of the corresponding mechanism are shown in
appendix 2.
• In section V we distinguish four classes of overconstrained mechanisms: (i) Symmetric
mechanisms, (ii) Bennett based mechanisms, (iii) Combined special geometry mechanisms
and (iv) Mechanisms derived from "overconstrained manipulators" (Note: we call
overconstrained manipulators 6 joint manipulators which have less then 6-degree-of freedom for
their end-effector motion.) For each class we present its general characteristic and some new
mechanisms that we found using synthetic methods. The input-output equations of the new
mechanisms are shown in appendix 3.
II. PRELIMINARIES
In this paper we are studying 3, 4, 5 and 6 link single loop linkages with all types of
lower pair joints except screw joints whose structural parameters satisfy special conditions
under which these linkages become mobile of unity mobility.
It turns out that 3, 4 and 5 link overconstrained mechanisms of any lower pair joint type
are special cases of 6 link linkages of revolute and prismatic joints. The general rule is the
following: If a 3, 4 or 5 link linkage contains a composite joint (i.e. joint composed of a certain
number of revolute and prismatic joints such as S, E and C joints) then this linkage is a special
case of the more general linkage obtained if we substitute the composite joint with its
components revolute and prismatic ones. If the 3, 4 or 5 link linkage contains only revolute
joints, then it is a special case of the 3C, 2R2C or 4RC linkage respectively where the prismatic
portion of the C joint is considered locked. If the C joint is substituted with its revolute and
prismatic joints then it is clear that the previous 3, 4, or 5 link linkage is a special case of a 6
link linkage. In a similar way we can show that all 3, 4, 5 link linkages with revolute and
prismatic joints are special cases of the 6 link ones. Hence, all single loop overconstrained
mechanisms are special cases of 6 link 6R, 5R1P, 4R2P or 3R3P linkages. (Note: 6 link
linkages with composite joints are always mobile due to Kutzbach criterion.
6 link linkages with more than 3 prismatic joints are always mobile.)

A general 6 link linkage is shown in figure 1: six axes corresponding to revolute or
prismatic joints, having an arbitrary position in the three dimensional space are interconnected
with 6 links forming a closed loop. The joints are numbered arbitrarily since the loop is closed.
With no loss of generality, we use the numbering shown on this figure: where joint 1 is one of
the 6 axes chosen arbitrarily, and joints 2, 3, ..., 6 are the joints following joint 1 in a clockwise
direction. Link i is the link between joints i and i+1. Link 6 is the link between joints 6 and 1.
joint 1
joint 4joint 5
joint 6
joint 3
joint 2
link6
link 4link 5
link 3
link 2
link 1
Fig. 1: General 6 Link Linkage
In this paper, we describe the relative position of links and joints, using the variant ofthe Denavit and Hartenberg notation in which the parameters ai, αi, d i, θ i are defined as: ai is the
length of link i, αi is the twist angle between the axes of joints i and i+1, di is the offset along
joint i, and θ i is the rotation angle about joint axis i. For a 6 link linkage, there are 24 Denavit
and Hartenberg parameters that define its assembly configuration.
A general 6 link linkage, due to the Kutzbach criterion, is immobile. The term "general"
describes arbitrary values of its Denavit and Hartenberg parameters. It turns out that when
some of the Denavit and Hartenberg parameters obtain special values or satisfy some algebraic
conditions, the linkage becomes mobile. These special values of the Denavit and Hartenberg
parameters, that are called "overconstraint conditions", are the interpretation of a special
geometric configuration of the linkage joint axes.
A general 6 link linkage has its 24 Denavit and Hartenberg parameters constants while 6
link overconstrained mechanisms, due to their mobility, have only 18 constant parameters and 6kinematic unknowns: for a revolute (prismatic) joint, θ i (di) is the kinematic variable, while ai,
αi, di (ai, αi, θ i) are the constant parameters. As we are studying only overconstrained
mechanisms of unity mobility, one of the kinematic variables is the input and the other 5 are
found from algebraic equations, called input-output equations, as a function of the input
variable.
From a theoretical kinematics point of view, a 6 link linkage becomes mobile when any
6th joint axis of the linkage belongs to the linear complex formed by the other 5 (further
information can be found in Hunt, 1978 and in Phillips, 1991). Hence, when some special

values or algebraic conditions on the Denavit and Hartenberg parameters of a general 6 link
linkage, correspond to a set of 6 joint axes belonging to a linear complex, the linkage is mobile.
This mobility is either configuration dependent (i.e. instantaneous; singular configuration) or
configuration independent (full cycle mobility). From the definition of overconstrained
mechanisms, it is clear that overconstraint conditions must be configuration independent. This
is equivalent of saying that overconstraint conditions are relationships among the 18 constant
Denavit and Hartenberg parameters only.
III. METHOD OF STUDYING OVERCONSTRAINED MECHANISMS
A 6 link linkage is kinematically equivalent to a 6 link 6 joint open loop serial
manipulator whose end effector coordinate system is coincident to its base coordinate system
(see figure 2 .)
1
4
5
6
3
2
7
1 and 7
4
5
6
3
2
Fig2.a Fig2.b
Fig.2: A general 6 joint manipulator at an arbitrary end effector pose and at the pose where end effector and base reference systems are coicident.
The manipulator inverse kinematics problem, i.e. the problem of finding out the values
of the manipulator kinematic variables that correspond to that end effector position and
orientation, is the same as that of finding out the assembly configurations for its corresponding
6-link linkage.
Recently Raghavan and Roth (1990a,b, 1993) proposed a method that solves the inverse
kinematics problem of any general non-degenerate 6 joint open loop serial manipulator.
Mavroidis and Roth (1992a,b) and Mavroidis (1993) using the Raghavan and Roth method
identified the algebraic conditions on the Denavit and Hartenberg parameters that lower the
degree of the manipulator characteristic polynomial (i.e. a polynomial in one of the kinematic
variables or a linear combination of the kinematic variables that give all the solutions to the
inverse kinematic problem for this variable). They showed that these lower degree characteristic
polynomial manipulators, called special manipulators, form 6 general classes.

In this section we extend the Raghavan and Roth method of solving the inverse
kinematics problem of general manipulators and using the criteria and techniques of obtaining
special manipulators established by Mavroidis and Roth, we describe a general approach to
study overconstrained mechanisms based on the kinematic equivalence of 6 joint open loop
serial manipulators and 6 link single loop linkages.
a) proof of the overconstraint
In appendix 1, the Raghavan and Roth method is briefly described. This method
consists of calculating a 12 by 12 matrix called Σ (see equation A1.5) whose entries are
quadratics in xi=tg(θi/2) if joint i is revolute or di if joint i is prismatic. The value of i depends
on the subscript of the first matrix of equation A1.1 while θi or di is called the "hidden
variable." The determinant of Σ equated to 0, gives the 16th degree characteristic polynomial ofthe manipulator in xi or di. The roots of this polynomial are the solutions to the manipulator
inverse kinematics problem for the hidden variable. The other kinematic variables are calculated
solving a linear system which is formed from the columns of Σ. The coefficients of the
manipulator characteristic polynomial are functions of the manipulator constant Denavit and
Hartenberg parameters and the elements of the 4x4 homogeneous transformation matrix Ah that
describes the manipulator end-effector desired position and orientation in the fixed base
coordinate system. Obviously for each Ah a different characteristic polynomial exists that gives
the various configurations to reach this end-effector position and orientation.
When Ah=I, where I is the 4x4 identity matrix, the manipulator end-effector coincides
with the base fixed coordinate system. As it was mentioned before in this end-effector position
and orientation the manipulator can also be seen as a closed loop 6 link linkage. The
manipulator and the linkage structural parameters are exactly the same since manipulator and
linkage are the same kinematic structure. One important note is that in contrast with what is
happening when the manipulator end-effector is at an arbitrary position and orientation, in the
case of Ah=I, the Denavit and Hartenberg constant parameters α6, a6, d6 or θ6 play an
important role in determining the linkage kinematic properties such as mobility or number of
assembly configurations, since now they describe the relative position of two active joints of the
kinematic chain.
When Ah=I there are three possibilities:
• The manipulator characteristic polynomial has no real roots. This means that this end-effector
position and orientation is out of the manipulator workspace or the equivalent that no closed
loop linkage exists that satisfies the given structural parameters.

• The manipulator characteristic polynomial has real roots. These roots give the manipulator
configurations to reach this end-effector position and orientation or the closed loop linkage
assembly configurations.
• Σ has linear dependent lines. In Mavroidis and Roth 1992a, it is stated that such a situation
occurs when the manipulator end-effector motion has less than 6 degrees of freedom either
instantly (singular configuration) if this is happening for a specific Ah matrix or permanently if
this happens for any Ah matrix. In both cases there are more unknowns than equations and
obviously it is impossible to solve the inverse kinematics problem. If Ah=I and Σ has linear
dependent lines (no matter what is the reason for this degeneracy of Σ matrix: i.e singular
manipulator configuration or degenerate manipulator) then the manipulator end-effector motion
at Ah=I has less than 6 degrees of freedom and the equivalent, the closed loop 6 link linkage is
mobile.
Therefore, the necessary and sufficient condition of overconstraint is:
"If, for a given 6 joint open loop serial manipulator, the lines of Σ at Ah=I are linear dependent
then the closed loop linkage formed by the manipulator structural parameters is an
overconstrained mechanism.”"
There are 2 exceptions in this general rule:
(i) There are some special values of the Denavit and Hartenberg parameters for which Σ has
linear dependent lines due to numerical reasons and not due to the overconstraint. These values
of the Denavit and Hartenberg parameters are well specified in Mavroidis (1993) and depend on
the form of equation A1.1. When we want to test for overconstraint a structure that satisfies
these special values we have only to change the numbering of joints so that it is no longer
leading to a numerical degeneracy of Σ. For example, from Mavroidis 1993 we know that if we
are using equation A1.1 to solve inverse kinematics of a 6R, the condition α1=0°, will lead to a
numerical degeneracy of Σ. If joint 1 is called joint 2 and joint 2 is called joint 3, etc. then the
previous condition becomes α2=0° and will no longer be a problem for testing for
overconstraint.
(ii) In some cases, upon back substitution of the hidden variable to find out the rest of the
variables (see step 8 in Appendix 1) we obtain a degeneracy of the linear system we are solving.
This is a very special case of the solution procedure and is due to extraneous roots of the
characteristic polynomial. If such a situation occurs, then this is a strong indication that the
proposed structure is an overconstraint mechanism. In order to prove overconstraint for this
linkage, we only have to change the form of equation A1.1. This time a new Σ will occur that
will show the linear dependance of its lines.
b) calculation and solution of the input-output equations

Once the overconstraint is proved then the input-output equations are obtained from the
equations of the homogeneous system calculated in step 4 of the Raghavan and Roth method as
it is described in appendix 1. This system which results in after eliminating three of the six
kinematic variables in steps 1 to 3 of Appendix 1, has the general form:Σ1X 1=0 (1)
where Σ1 is a 6 by 9 matrix whose entries are functions of the hidden in Σ1 kinematic variable
(i.e. functions of sin(θi) and cos(θi) if joint i is revolute and functions of di and di2 if joint i is
prismatic). X1 is called the vector of power products. It represents the unknowns of the
homogeneous system and it is composed of products of functions of two of the kinematicvariables. The elements of Σ1 and X1 depend on the way the loop closure equation is written
and on the linkage joint type (i.e. 6R, 5R1P, 4R2P or 3R3P). For example for a 6R linkageand if the loop closure equation is written as equation A1.1 then the hidden variable is θ3 and
X1=[s4s5, s4c5, c4s5, c4c5, s4, c4, s5, c5, 1] t. The rules for determining the power products
vector in algorithmic form can be found in Mavroidis, 1993. With no loss of generality we aregoing to use this example of Σ1 and X1 to describe the method of obtaining and solving the
input-output equations of overconstrained mechanisms. For other joint type linkages (i.e.
5R1P, 4R2P or 3R3P) or for other ways to write the loop closure equation, the method is
exactly the same.
One of the six overconstrained mechanism kinematic variables is known and consists the
mechanism input while the other kinematic variables are the mechanism outputs. Due to the
linkage symmetry, any kinematic variable can be chosen to be the input. With no loss ofgenerality, the hidden variable is the mechanism input. Then, the elements of the Σ1 matrix are
known and one kinematic variable among the two of the vector X1 can be suppressed into the
elements of Σ1 to obtain a new homogeneous system of the form:
Σ1' X 1'=0 (2)
where Σ1' is a 6 by 3 matrix. If, for example, the new hidden variable is θ4 then the entries of
Σ1' are functions of sin(θ4) and cos(θ4) and the vector X1' is: X1'=[s5, c5, 1] t . For one
degree of freedom overconstrained mechanisms, at least 3 of the 6 Σ1' lines are linearly
independent. We call any 3 by 3 submatrix of Σ1' formed by three linearly independent Σ1'
lines as Σ1". Setting the determinant of Σ1" equal to zero, we obtain the linkage input-output
equation for the hidden in Σ1" kinematic variable (i.e. for our example it is θ4.) The other
linkage kinematic variables are calculated with a linear procedure which is exactly the same as
the one described in step 8 of the Raghavan and Roth method in Appendix 1.
The input-output equation obtained from the determinant of Σ1" is a function of sin(θ4)
and cos(θ4) and using classical trigonometric transformations it becomes a 6th degree
polynomial in x4=tg(θ4/2). The special properties of the manipulator characteristic polynomial
determined by Mavroidis and Roth (1992a) can occur for the overconstrained mechanism input-
output equation also. More specifically the input-output equation can have:
• an (x42+1) factor. Most of the times there is an (x42+1) factor and the input-output equation
degree drops by 2.
• zero coefficients: Sometimes the sixth degree input-output equation has its first or lastcoefficient equal to 0, accepting thus a 180 or 0 degrees solution respectively for θ4. This
constant value for θ4 can either be an extraneous root and hence we have a reduction to the
polynomial degree or it can be a correct solution to the mechanism displacement analysis. This
last case occurs whenever joint 4 is locked to one constant position or the equivalent the
overconstrained mechanism is a 5 link one.
• linear dependent columns: Σ1" can have linear dependent columns and this problem can be
overpassed by redefining the power products. In this case the number of power products dropsby 1 and we only have to use 2 of the 3 Σ1" lines. Again this case occurs if the power product
vector kinematic variable (i.e. for the example it is θ5) is locked to one constant position.
• extraneous roots: Sometimes the input-output equation has real extraneous roots and a
continuous checking of the solutions for verifying the loop closure equation is necessary. Thisproblem can also be overpassed by examining the Σ1" lines and finding a more simple way to
obtain the input-output equation.
Although we have presented our method by using a 6R overconstrained mechanism witha power product vector X1 containing θ4 and θ5 as variables, exactly the same method can be
used to obtain the input-output equations of any 5R1P, 4R2P and 3R3P linkages and for power
product vectors contain any kinematic variables.
This method of obtaining the input-output equations of an overconstrained mechanism
assumes that the mechanism is a 6 link one. As we explained in the beginning of this section,
3, 4 or 5 link overconstrained mechanisms can be considered as 6 link mechanisms which have
some of their joints locked. For the reduced link overconstrained mechanism, with this method
we can calculate the constant value of the locked joint kinematic variables for any value of the
input kinematic variable.
IV. VERIFICATION ON KNOWN OVERCONSTRAINED MECHANISMS
Using the method described in section III, we verified overconstraint and obtained the
input-output equations for all known overconstrained mechanisms. In this section we present
known overconstrained mechanisms whose conditions can be generalized or corrected. These
mechanisms are the Bricard line symmetric, the Bricard planar symmetric and the Waldron's
hybrid planar or spherical and Bennett based mechanisms. All new results are tested for
overconstraint and their input-output curves are obtained using the method presented in section
III.
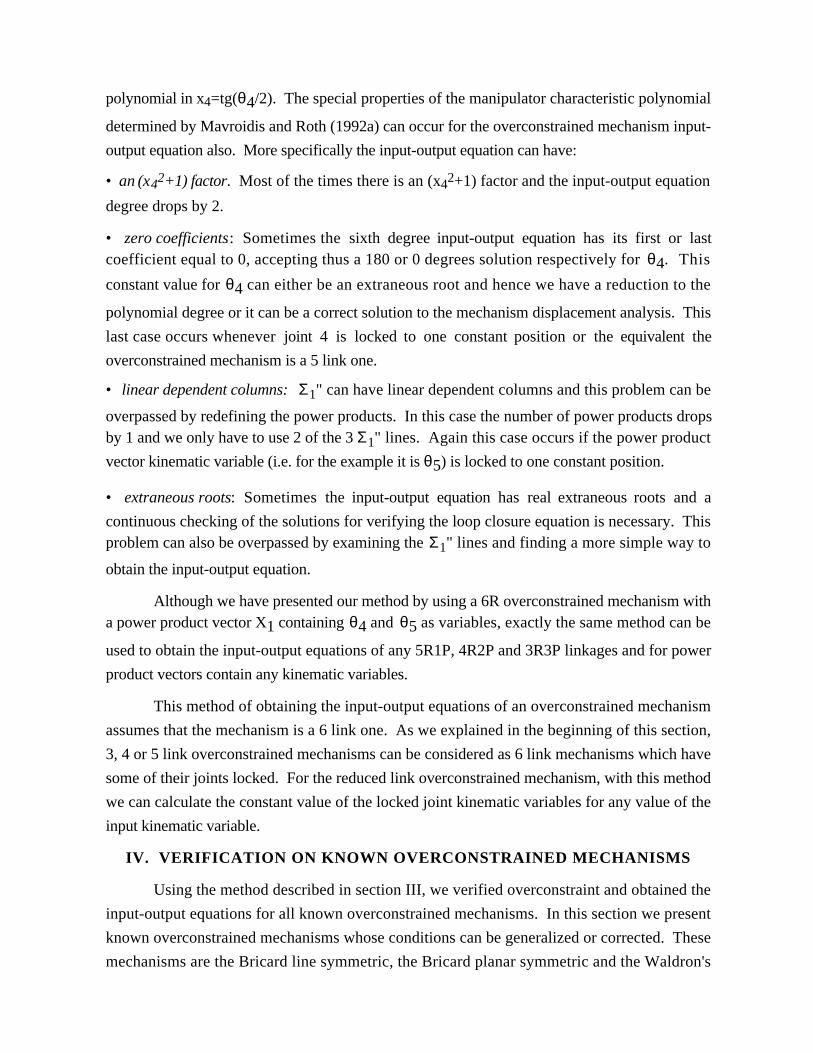
a) Bricard line symmetric mechanism:
The structural parameters of this mechanism are shown in table 1:
α a d1 α1 a1 d12 α2 a2 d23 α3 a3 d34 α4=α1 a4=a1 d4=±d15 α5=α2 a5=a2 d5=±d26 α6=α3 a6=a3 d6=±d3
Table 1: Bricard line symmetric mechanism.
In literature (Baker 1980), it is known that the opposite side offsets of this mechanism
(i.e. d1 and d4, d2 and d5, d3 and d6) must be equal. We found that these offsets can also be
equal of opposite sign. In appendix 2.a the input-output curves of one linkage satisfying these
conditions and the values of its kinematic variables for some representative input values are
presented. It is interesting to remark that for equal opposite side offsets, opposite side
kinematic variables are equal while for opposite signed offsets the opposite sided variables are
opposite signed.
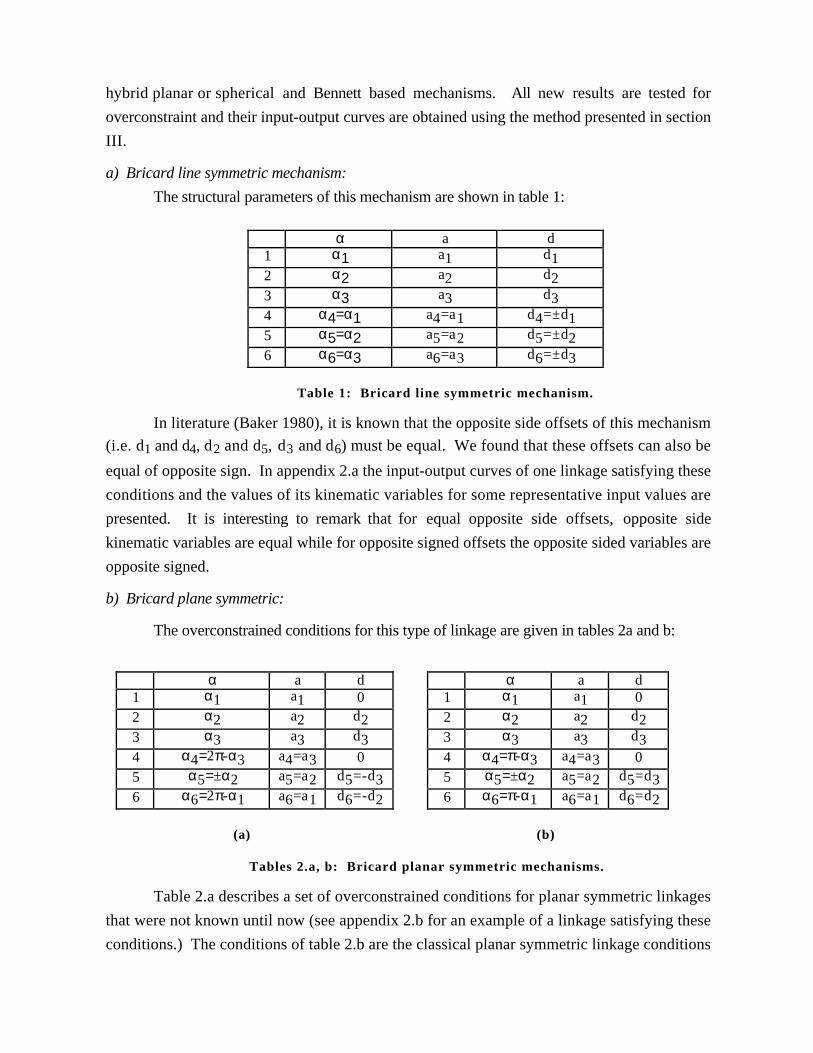
b) Bricard plane symmetric:
The overconstrained conditions for this type of linkage are given in tables 2a and b:
α a d1 α1 a1 02 α2 a2 d23 α3 a3 d34 α4=2π-α3 a4=a3 05 α5=±α2 a5=a2 d5=-d36 α6=2π-α1 a6=a1 d6=-d2
(a)
α a d1 α1 a1 02 α2 a2 d23 α3 a3 d34 α4=π-α3 a4=a3 05 α5=±α2 a5=a2 d5=d36 α6=π-α1 a6=a1 d6=d2
(b)
Tables 2.a, b: Bricard planar symmetric mechanisms.
Table 2.a describes a set of overconstrained conditions for planar symmetric linkages
that were not known until now (see appendix 2.b for an example of a linkage satisfying these
conditions.) The conditions of table 2.b are the classical planar symmetric linkage conditions

(Baker 1980) including one important correction: the condition between the twist angles α2 and
α5 must be α5±α2=0 and not α5+α2=π. We show in appendix 2.b that with the incorrect
condition we obtain an immobile closed loop linkage for which we calculate its assembly
configurations.
c) Waldron's hybrid planar (E) or spherical (S) and Bennett 4 link mechanism:
Waldron in 1968 proposed a new mechanism based on a combination of a Bennett loop
and of a planar or spherical 4R one. The overconstrained conditions of these mechanisms are
presented in tables 3.a,b,c,d:α a d
1 α1 a1 02 α2 a2 d23 0 a3 d34 0 a4 d45 α5=π-α1 a5 d5=-d3-d46 α6=π-α1 a6=a1 d6=d2
(a)
α a d1 α1 a1 02 α2 a2 d23 0 a3 d34 0 a4 d45 α5=±α2 a5 d5=-d3-d46 α6=-α1 a6=a1 d6=-d2
(b)
Tables 3a, b: Waldron's planar and bennett based mechanism.
α a d1 α1 a1 02 α2 a2 d23 α3 0 04 α4 0 05 α5=π-α1 a5=a2 06 α6=π-α1 a6=a1 d6=d2
(c)
α a d1 α1 a1 02 α2 a2 d23 α3 0 04 α4 0 05 α5=±α2 a5=a2 06 α6=-α1 a6=a1 d6=-d2
(d)
Tables 3c, d: Waldron's spherical and bennett based mechanism.
In tables 3.a and b, the parallel joint axes are 3, 4 and 5. In tables 3.c and d, axes 3, 4
and 5 form a spherical joint. Joint axes 6,1 and 2 form a set of Bennett joints (see section V for
definition of the term "Bennett joint".) The conditions presented here are slightly different than
those proposed by Waldron (see Waldron 1979, table 1 cases 53 and 54)
- In tables 3.a and b we introduced a condition between the offsets of the 3 parallel axes (i.e.d3+d4+d5=0) that was not mentioned by Waldron. This condition which has no influence in the
overconstraint, is necessary for closing the loop. If this condition it is not satisfied then no real
loop can exist that satisfies the overconstraint conditions.

- In table 3.b we corrected Waldron's condition by adding the (-) sign in the α6 condition.
Waldron's linkage (i.e. the one without the (-) sign) can not be realized physically.
- In table 3.c the offsets of all axes participating in the spherical joint must be 0. Again here the
reason for this condition is to be able to close the loop.
- For some reason Waldron is not mentioning the conditions of table 3.d despite of the fact that
they are similar to the table 3.b ones. For this mechanism, the input-output curves are shown in
appendix 2.c.
A special case of these mechanisms were also found by Yan, Hwang and Sheu 1987
(the spherical and the bennett loop) and Lee and Yan 1993 (the planar and the bennett loop)
using analytic methods.
For all other known overconstrained mechanisms we verified the overconstraint and
obtain their input-output equations. These mechanisms are:
- the Bricard trihedral (Wohlhart 1993) and octahedral mechanisms (Baker 1980.)
- Wohlhart symmetric mechanism (Wohlhart 1987.)
- Waldron (Waldron 1968), Baker (Baker 1993), Goldberg 5 and 6 link (Goldberg 1943),
Wohlhart, (Wohlhart 1991) Bennett based mechanisms.
- Waldron's 4 link mechanisms (1979.)
V. SYNTHESIS OF NEW OVERCONSTRAINED MECHANISMS
All known overconstrained mechanisms can be distinguished in four different classes:
(i) Symmetric mechanisms, (ii) Bennett based mechanisms, (iii) Combined special geometry
mechanisms and (iv) Mechanisms derived from overconstrained manipulators. We made this
distinction based on a general common characteristic of all mechanisms belonging to the same
class. Using synthetic reasoning, the common characteristic of each class led us to new
mechanisms. For the new mechanisms we proved overconstraint and solved the input-output
equations using the method of section III.
Before presenting the four classes of overconstrained mechanisms, an important remark
must be made on the nature of overconstrained conditions.
In order to achieve overconstraint of closed loop linkages the linkage structural
parameters must comply with two different geometric conditions:
(a) the 6 joint axes must lie on the same linear complex
(b) the structural parameters must form a 6 link closed-loop linkage

The conditions on the linkage structural parameters that fulfill (a), will be called linear
complex conditions and those that satisfy (b) will be called loop closure conditions. It turns out
that the linear complex conditions which are the more important for achieving overconstraint,
are not enough to guarantee that the linkage will be a 6 link closed loop and additional
conditions, the loop closure conditions must be used to make sure that the loop will be closed.
Usually different linear complex conditions ask for different loop closure conditions. It is also
possible that the same linear complex condition can have two or more loop closure conditions.
Obviously the linkages that have same linear complex conditions and different loop closure
conditions are of the same type overconstrained mechanisms.
Linear complex conditions can be distinguished in those for which the 6 joint axes
belong to a linear complex independently of the fact that the chain composed of the 6 axes is
open or closed and those for which the 6 axes lie in the linear complex only if the loop is closed.
This difference between linear complex conditions becomes more clear when dealing with 6
joint manipulators. There are structural parameter conditions for which the manipulator endeffector motion has less than 6 degrees of freedom for any Ah matrix and there are structural
parameters for which this constrained end effector motion occurs only when Ah=I. For closed
loop linkages both type linear complex conditions are equivalent and lead to overconstrained
mechanisms.
In this section, for each class of overconstrained mechanisms, we present its general
characteristic and the new mechanisms that we found.
(i) Symmetric mechanisms
Symmetry is an important property of overconstrained mechanisms. In literature
symmetric linkages are those for which a plane or line of symmetry exists in every assembly
configuration. In this paper we use a different definition of symmetric linkages. Consider the
topological chart of a 6 joint closed linkage shown in figure 3.
1
4
2
53
4
Fig. 3: Topological chart of a line symmetric linkage.
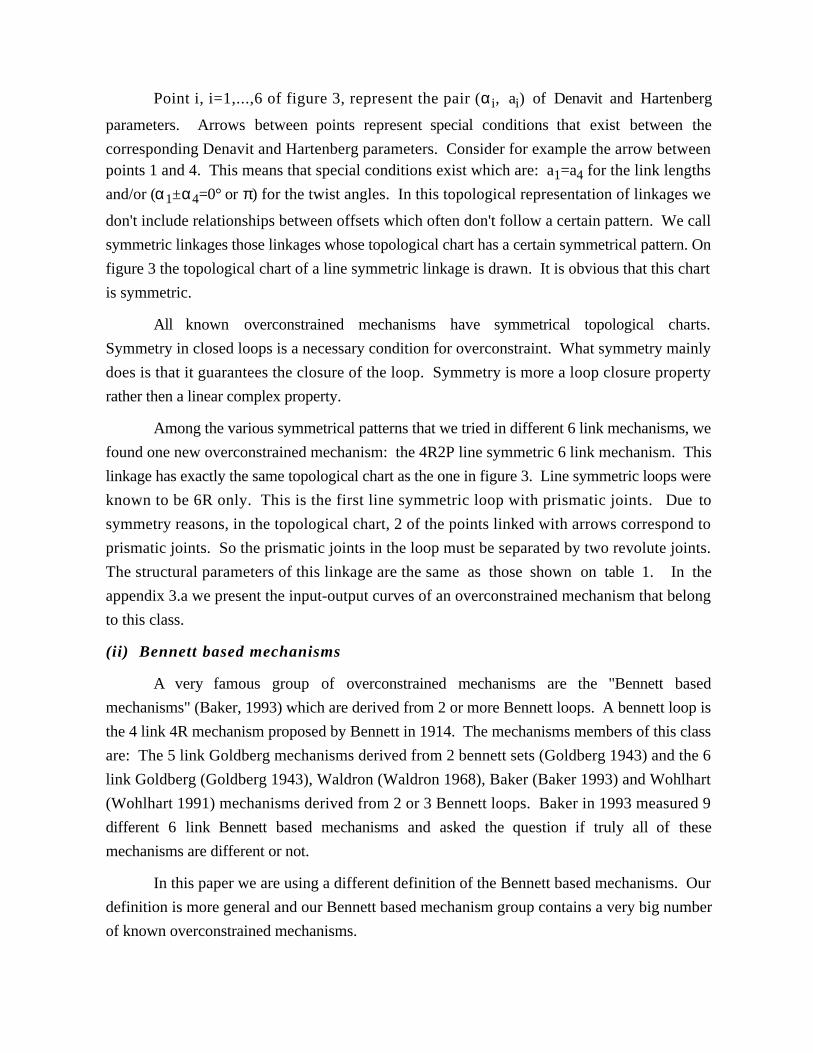
Point i, i=1,...,6 of figure 3, represent the pair (αi, ai) of Denavit and Hartenberg
parameters. Arrows between points represent special conditions that exist between the
corresponding Denavit and Hartenberg parameters. Consider for example the arrow betweenpoints 1 and 4. This means that special conditions exist which are: a1=a4 for the link lengths
and/or (α1±α4=0° or π) for the twist angles. In this topological representation of linkages we
don't include relationships between offsets which often don't follow a certain pattern. We call
symmetric linkages those linkages whose topological chart has a certain symmetrical pattern. On
figure 3 the topological chart of a line symmetric linkage is drawn. It is obvious that this chart
is symmetric.
All known overconstrained mechanisms have symmetrical topological charts.
Symmetry in closed loops is a necessary condition for overconstraint. What symmetry mainly
does is that it guarantees the closure of the loop. Symmetry is more a loop closure property
rather then a linear complex property.
Among the various symmetrical patterns that we tried in different 6 link mechanisms, we
found one new overconstrained mechanism: the 4R2P line symmetric 6 link mechanism. This
linkage has exactly the same topological chart as the one in figure 3. Line symmetric loops were
known to be 6R only. This is the first line symmetric loop with prismatic joints. Due to
symmetry reasons, in the topological chart, 2 of the points linked with arrows correspond to
prismatic joints. So the prismatic joints in the loop must be separated by two revolute joints.
The structural parameters of this linkage are the same as those shown on table 1. In the
appendix 3.a we present the input-output curves of an overconstrained mechanism that belong
to this class.
(ii) Bennett based mechanisms
A very famous group of overconstrained mechanisms are the "Bennett based
mechanisms" (Baker, 1993) which are derived from 2 or more Bennett loops. A bennett loop is
the 4 link 4R mechanism proposed by Bennett in 1914. The mechanisms members of this class
are: The 5 link Goldberg mechanisms derived from 2 bennett sets (Goldberg 1943) and the 6
link Goldberg (Goldberg 1943), Waldron (Waldron 1968), Baker (Baker 1993) and Wohlhart
(Wohlhart 1991) mechanisms derived from 2 or 3 Bennett loops. Baker in 1993 measured 9
different 6 link Bennett based mechanisms and asked the question if truly all of these
mechanisms are different or not.
In this paper we are using a different definition of the Bennett based mechanisms. Our
definition is more general and our Bennett based mechanism group contains a very big number
of known overconstrained mechanisms.

We call "set of Bennett joints" (see Mavroidis and Roth 1992a), 3 adjacent revolute
joints whose Denavit and Hartenberg parameters satisfy the following special formula
introduced by Bennett for his 4-link overconstrained mechanism:
k=sin(αi)/ai=±sin(αi+1)/ai+1 and di+1=0 (3)
(Note here the 3 revolute joints are joints i, i+1 and i+2.)
The constant k is a parameter of the Bennett set and is called the Bennett ratio.
Special cases of the Bennett joints are the spherical joint (S) and the planar joint (E).
The Bennett based mechanisms are mobile linkages which contain at least one set of
Bennett joints. All overconstrained mechanisms known until now with Bennett joints have a
common characteristic which can be considered as a first necessary condition of achieving
overconstraint with Bennett sets:
"every joint of the linkage belong to a Bennett set." c.1
If we consider the 6 link linkage of figure 1 and if all joints are revolute then there are
only 2 independent possibilities of having all joints belong to a bennett set:
(i) the linkage has 2 sets of Bennett joints which are joints (1,2,3) and (4,5,6). The 2 Bennett
sets have no joint in common. All bennett based mechanisms mentioned in the beginning of this
paragraph, along with the Waldron hybrid planar or spherical and bennett loops presented in
section 3.c (if the spherical and planar joints are considered as special cases of a set of bennett
joints) and the planar symmetric mechanisms of section 3.b, have 2 sets of Bennett joints that
have no common joint. For all of these mechanisms (except the mechanisms containing a
spherical or a planar joint) there is a second important necessary condition in order to obtain
overconstraint:
"The 2 Bennett sets have the same Bennett constant" c.2
(ii) the linkage has 3 sets of Bennett joints which are joints (1,2,3), (3,4,5) and (5,6,1). Any
two of the Bennett sets have one joint in common. In this case belong only one mechanism: the
Wohlhart symmetric mechanism (Wohlhart, 1987).
All other possibilities of obtaining a linkage whose joints belong to a bennett set, can be
considered as a combination of cases (i) and (ii).
The bennett condition (equation 3) is not verified if between the revolute joints there is a
prismatic joint. In the case of 6 link manipulators with prismatic joints the necessary condition
c.1 can be satisfied only if the prismatic joints are coincident with a revolute joint to form
cylindric joints. Of course in this case the 6 link linkage becomes a 5 link one.

In the case of 5 link linkages with all revolute joints, condition c.1 is satisfied in one
independent way only. There are two Bennett sets formed by joints (1,2,3) and (3,4,5) which
have one common joint. The only known overconstrained mechanism which is the Goldberg 5-
link, belong to this case. His 2 Bennett sets satisfy condition c.2 also.
In the case of 4 link 4 R loops conditions c.1 and c.2 are both satisfied in the only
known mechanism of this class which is the very famous Bennett mechanism.
In this paragraph we grouped in one class all known overconstrained mechanisms which
have sets of Bennett joints and showed that all of them satisfy condition c.1 and most of them
condition c.2. These 2 conditions are necessary conditions for overconstraint. Once c.1, and
maybe c.2 are satisfied then symmetry (ex. planar symmetric mechanism) or additional Bennett
sets (ex, Goldberg mechanism) or other geometric conditions (ex. Wohlhart mechanism) can be
used to obtain the overconstaint condition.
We didn't find any new mechanism that belong in this class.
(iii) Combined special geometry mechanisms
In Mavroidis and Roth 1992a, 6 classes of special manipulators (i.e. manipulators with
a lower degree characteristic polynomial than their general manipulator) have been identified.
Manipulators of each class had structural parameters that correspond to a special geometric
condition between their joints. These special geometric properties have been found to be:
spherical joints, planar joints, sets of Bennett axes, pairs of perpendicular joints, and pairs of
parallel joints . In Mavroidis and Roth 1992b the special geometric properties were combined
and new manipulators with a characteristic polynomial of degree 2 were determined. WhenAh=I we have the opportunity to add more special geometric conditions in the kinematic chain
by arranging the relative position of joints 1 and 6 which is not possible in an arbitrary position
of the manipulator end-effector. Manipulators of degree 2 are the first candidates to show adegeneracy at Ah=I which is equivalent to a mobility of the equivalent 6 link linkage. In this
paragraph we studied the combined manipulators presented in Mavroidis and Roth 1992b attheir Ah=I position. Two of them revealed new mechanisms which are:
a) a 6 link 5R1P overconstrained mechanism with one planar joint and one Bennett set of
joints.
This is equivalent of Waldron's hybrid mechanisms presented in section IV.c. Here the
difference is that the planar joint is composed of one prismatic and two revolute instead of three
revolute. Also here the loop closure conditions are different. The structural parameters of the
new mechanisms are shown on tables 4a,b:

α a d1 0 a1 d12 90 a2 θ2=03 0 a3 d34 90 a4 d4=-d35 α5 a5 d5=d16 α6=π-α5 a6=a5 d6=0
(a)
α a d1 0 a1 d12 90 a2 θ2=03 0 a3 d34 90 a4 d4=-d35 α5 a5 d5=d16 α6=-α5 a6=a1 d6=0
(b)
Tables 4a, b: New planar and bennett based mechanism.
In Tables 4.a and 4.b the prismatic joint is assumed to be the 2nd joint. Joints 2,3 and 4
form one planar joint and joints (5,6,1) are the set of Bennett joints. In appendix 3.b the input-
output curves of one mechanism of this group are presented.
b) spherical joint and equal length links.
The structural parameters of this mechanism are shown in table 5:
α a d1 α1 a1 02 α2 a2=a1 03 α3 a3=0 04 α4 a4=0 05 α5 a5 06 α6 a6=a5 0
Table 5: Spherical joint with equal link lengths.
Joints 3,4, and 5 form a spherical joints. All offsets are 0 and links 1 and 2 have equal
lengths. The same is happening for links 5 and 6. All twist angles are arbitrary. In appendix
3.c we show the input-output curves for this mechanism. It turns out that joints 2 and 6 are
always locked at a joint angle equal to 180. This mechanism is therefore a 4 link one. It is the
equivalent of a trihedral 6 link mechanism for the 4 links.
(iv) Mechanisms derived from overconstrained manipulators
Linear complex conditions that are true for any Ah matrix make a 6 joint manipulator to
be an overconstrained one. In this case the manipulator end effector motion has less than 6
degrees of freedom. That is to say, there are end-effector poses for which the joint variables
can be changed while the end-effector maintains its pose. When the end effector of anoverconstrained manipulator is placed in the pose defined by Ah=I then due to the loop internal
movement, an overconstrained mechanism is formed. Obviously the pose defined by the Ah=I
end-effector position maybe outside the manipulator workspace and no closed loop linkage

exists to satisfy the manipulator linear complex conditions. So not only the linear complex
conditions must be determined of overconstrained manipulators but also their loop closure
conditions.
In Mavroidis and Roth 1992a a set of new overconstrained manipulators all with parallel
revolute joints has been found. We show here that these overconstrained manipulators lead to
some interesting new overconstrained mechanisms.
a) 4R2P 6 link linkage with 2 pairs of parallel revolute joints
The structural parameters of this mechanism are given in Table 6. Here joints 2 and 5
are prismatic.α a d,θ
1 α1 a1 d12 α2=-α1 a2 θ2=0
3 α3 a3 d34 α4 a4 d45 α5=-α4 a5 θ5=0
6 α6=±α3 a6 d6
Table 6: 4R2P 6 link linkage with 2 pairs of parallel revolute joints
All link lengths and offsets have arbitrary values. Twist angles α1 and α2 have opposite
signed values and θ2=0 in order to have revolute joints 1 and 3 parallel. Similar conditions for
α4, α5 and θ5 make revolute joints 4 and 6 to be parallel. The special condition between twist
angles α3 and α6 is the loop closure condition. This overconstrained mechanism has not been
reported yet. In appendix 3.d the input output equations for this mechanism are given.
b) 4R2P 6 link linkage with 1 planar joint.
The linkage described in table 7 has joints 2 and 5 prismatic and revolute joints 3, 4 and6 parallel. The loop closure conditions define the values of α1, α2 and α6. All link lengths,
offsets and the value of θ2 are arbitrary. In appendix 3.e a numerical example is treated. We
can see that θ1 has always opposite signed values than those of the constant parameter θ2.
Therefore joint 1 is always locked and this linkage is a 5 link one.
α a d,θ1 0 a1 d12 α2 a2 θ23 0 a3 d34 α4 a4 d45 α5=-α4 a5 θ5=0
6 α6=±α2 a6 d6

Table 7: 4R2P 6 link linkage with 1 set of 3 parallel revolute joints
c) 5R1P 6 link linkage with 1 planar joint and 1 pair of parallel revolute joints.
The following linkage (see table 8) has 1 prismatic joint (joint 2), 3 parallel revolute
joints (joints 4, 5 and 6) and 1 pair of parallel revolute joints (joints 1 and 3). Only one loopclosure is needed, between the twist angles α3 and α6 (see also appendix 3.f input-output
curves.)α a d,θ
1 α1 a1 d12 α2=-α1 a2 θ2=0
3 α3 a3 d34 0 a4 d45 0 a5 d56 α6=±α3 a6 d6
Table 8: 5R1P 6 link linkage with 1 set and 1 pair of parallel revolute joints
For all the new overconstrained mechanisms presented in this paragraph, a big number
of other linkages whose structural parameters satisfy the same linear complex conditions exist.
These other linkages may have different loop closure conditions, different prismatic joint
position or different position of the parallel revolute joints in the loop then the one we have
chosen to present here. We consider that all these linkages are the same.
VI. CONCLUSIONS
In this article we presented a general method to prove overconstraint, obtain and solve
the input-output equations of any overconstrained mechanism. Using this method we verified
overconstraint of all known mechanisms. Is two cases we found that the known conditions
needed corrections in order to achieve overconstraint. We also found out that the
overconstrained conditions of 3 mechanisms can be generalized. We classified known
overconstrained mechanisms in 4 classes according to a general common characteristic of all
mechanisms belonging in this class. We then used synthetic methods, based on the general
characteristic of each class, and proposed 6 new mechanisms. We used our method to prove
overconstraint and obtain the input-output equations of our new mechanisms.
The same method can be used to determine overconstrained manipulators and solve their
inverse kinematics problem.
The determination of all overconstrained mechanisms consists one of the biggest and
more interesting problems in theoretical kinematics. The difficulty of the problem and the
almost zero practical applications of overconstrained mechanisms discouraged researchers to
continue research in this field with the same enthusiasm as in the 60's. We believe that the

method of studying overconstrained mechanisms described in this paper will be of great help to
those researchers that will try to revive the interest in overconstrained mechanisms.VII. REFERENCES
Baker J. E., 1980 , "An Analysis of the Bricard Linkages," Mechanisms and Machine Theory, Vol. 15, pp.267-286.Baker J. E., 1984, "On 5-Revolute Linkages with Parallel Adjacent Joint Access," Mechanisms and MachineTheory, Vol. 19, No 6, pp. 467-475.Baker J. E . , 1993 , "A Comparative Survey of the Bennett-Based 6-R Revolute Kinematic Loops,"Mechanisms and Machine Theory, Vol. 28, No.1, pp. 83-96Bennett G. T. , 1914 , "The Skew Isogram Mechanism," Proceedings of the London Mathematical Society,13, 2nd series, pp. 151-173.Bricard R., 1927, Leçons de Cinématique, Vol.2, Gauthier-Villards, Paris.Delassus, Et . , 1922, "Les chaînes articulées fermées et déformables à quatre membres," Bulletin des sciencesmathématiques, 2nd series, Vol. 46, pp. 283-304.Goldberg, M, 1943 "New five-bar and six-bar linkages in three dimensions," Transactions ASME, Vol. 65,pp. 649-661.Hunt K. H. , 1978, Kinematic geometry of mechanisms, Clarendon, Oxford, UK.L e e C . C . , Y a n H . S . , 1 9 9 3 , "Movable Spatial 6R Mechanisms With Three Adjacent Parallel Axes,"Journal of Mechanical Design, Transactions of the ASME, Vol. 115, pp. 522-529.Mavroidis C . , Roth B. 1992a, "Structural Parameters which Reduce the Number of ManipulatorConfigurations," Robotics, Spatial Mechanisms, and Mechanical Systems, ASME DE-Vol. 45, pp. 359-366.and to appear in the Journal of Mechanical Design, 1994.Mavroidis C. Roth B. , 1992b , "New manipulators with Simple Inverse Kinematics," Proceedings of the9th Cism-IFToMM Symposium on Robots and Manipulators, (Romansy 92), Udine, Italy. Mavroidis C., 1993, Résolution du problème géométrique inverse pour les manipulateurs série à 6 degrés deliberté, Thèse de Doctorat, Univérsité Pierre et Marie Curie, Paris.Myard F . E . , 1931a, "Contribution à la Géométrie des Systèmes Articulés," Bulletin de la SociétéMathématique de France, Vol. 59, pp. 183-210.Myard F. E., 1931b, "Sur les Chaines Fermées à Quatre Couples Rotoïdes non-concourants, Deformables auPremier Degré de Liberté. Isogramme Torique," Compte-rendus de l'Acadèmie de Science, Paris, Vol. 192, pp.1194-1196.Pamid i P . R . , Son i A . H . , Dukkipat i R . V . , 1973 , "Necessary and sufficient existence criteria ofoverconstrained five-link spatial mechanisms with helical, cylinder, revolute and prism pairs," Transactions of theASME, Journal of Engineering for Industry, V95, pp. 737-743.Phi l l ips J . , 1990 , Freedom in Machinery, Volume 2: Screw theory exemplified Cambridge UniversityPress, UK.Raghavan M. , Roth B . 1990a , "Kinematic Analysis of the 6R Manipulator of General Geometry,"Proceedings of the 5th International Symposium on Robotics Research, edited by H. Miura et S. Arimoto, MITpress, Cambridge, pp.263-270.Raghavan M., Roth B. 1990b, "A General Solution for the Inverse Kinematics of all Series Chains,"Proceedings of the 8th CISM-IFToMM Symposium on Robots and Manipulators, (Romansy 90), Cracow,Poland , pp. 24-31.Raghavan M. et Roth B . , 1993, "Inverse Kinematics of the General 6R Manipulator and RelatedLinkages," Journal of Mechanical Design, Transactions of the ASME.Sarrus , P . T . , 1853 , "Note sur la transformation des mouvements rectilignes alternatifs, en mouvementscirculaires; et reciproquement," Academie des sciences, comtes rendus hebdomataires des seances, Vol. 36, pp.1036-1038, Paris.Waldron K. J., 1968, "Hybrid Overconstrained Linkages," Journal of Mechanisms, Vol. 3, pp. 73-78.Waldron K. J . , 1969 , " Symmetric Overconstrained Linkages," Transactions of the ASME, Journal ofEngineering for Industry, V91, pp. 158-162.Waldron K. J. , 1973, "A Study of Overconstrained Linkage Geometry by Solution of Closure Equations-Part II. Four-Bar Linkages with Lower Pair Joints other than Screw Joints," Mechanism and Machine Theory,Vol. 8, pp. 233-247.Waldron K. J., 1979 , "Overconstrained Linkages," Environment and Planning B, Vol. 6, pp. 393-402.Wohlhart K., 1987, "A New 6R Space Mechanism," Proceedings of the 7th World Congress of the Theoryof Machines and Mechanisms, Sevilla, Spain, September 1987, Vol. 1, pp. 193-198.

Wohlhart K, 1991, "Merging two General Goldberg 5R Linkages to Obtain a New 6R Space Mechanism",Mechanism and Machine Theory, Vol. 26, 659-668.Wohlhart K., 1993, "The Two Types of the Orthogonal Bricard Linkage," Mechanism and Machine Theory,Vol. 28, No. 6, pp. 809-817.Yan H. S . , Hwang W. M. , Sheu J . B . , 1987 , "Movable 6R Mechanisms," Proceedings of the 7thWorld Congress of the Theory of Machines and Mechanisms, Sevilla, Spain, September 1987, Vol. 1, pp. 237-242.







