Download - Chapter6 Vibration Ahmedawad

VI. VIBRATION OF UNDAMPED
MULTIDEGREE OF FREEDOM
SYSTEMS
Mohamed T. Hedaya
6.1. Free VjE!'ation,
Example
mr Xr - - kr Xr - kz (x,, - xr)
nlz *z = - kz (xz - xr) - ks (xz - xs)
meXg=-ka(xs-xz)
IIlr Xr
rns Xs
tml tx)+[k]{x}={0}[mJ = mass matrix,
{x} = displacernent vector,
MECHANICAL VIBRATIONS First Edition, p.6.1
I,
+ (k.+kz) xr+(-kz) x2
mz xz + (-kz) x1+(k2+ft 3)x2+{-fu)xs = 0
+(-k s) x2+(k3) Xs = 0
-0
(differential equation of motion) (D.E.O.M.),
Ik]=stiffnessmatrix,
{0} = zero vector'
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.6.2
tml {x} + [k] {x} = {0} (D.E.O.M.)
Assume{x}={A}cos(urt.F),{A}=amplitudevector>
- urz [mJ {A} cos (ut - F) * t k] tA} cos (urt - F) = {0}, -}
[ -,,r' [m] + t k I l{A} = {0},
For nontrivial solution,
det[- rll2 [m] + [k]]= O (characteristicequation) (C.E.)
. C.E" is a third degree polynornial equation in u:2.
Rule
For n D.O.F. systems, C.E. is an nth degree polynomial equation in urz
MECHANICAL VIBRATIONS First Edition, p. 6.3
Free Vibration of Unrestrained Three Rotor System
Assume that, (qr I lr) * (qz / ls)
l, 6r = - Q (0r - 02)
bAz= - q (02 - 0r) - g (02 - 0s)
lr6s=-q(0s-0r)
tll{0} + [q ]{e} = {0} (differential equation of motion) (D.E,O.M.),
I lJ= inertia matrix, IqJ= torsional stiffness matrix,
t0) = angular displacement vector, {0} = zero vector.
Assume {x} = {A} cos (t..tt - F),
- {r2 [ | ] {A} cos (tot - F) * tq I {A} cos (urt- F) = {0}->[-ur'p]+tq1HA]={0}
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 6.4

T_lirs/ ,lr,.n[,* , ,.L
I
tr- ttt.
-i
^\ -f-(l\ *L_
f ,r.J)
-L3
-**,Vcr&(s-
J! l_, t t,t^tQ{,f"4h du( a
*c-.yt*",i:,t'
{"1 ,,.i.*J'
, N*I si.;t{ 1, L ,{It,rf').\, h*li r/i(14...,. q, ;4-i- .,)
-llt.l*L
il tl'.,t
*-. .2[;tttn'.*t (t0].J;q ;,r1)':r1,"l-i\,',n
--p erc,.n/14 ('*l) s*\.v-*- -tt f'o".-..
flr< B)1oyq
i.a,\u"e \t"
"f L"*-.
n-o-c\'.
()4(q
t-or*
f ..r c:-<
.r*rd
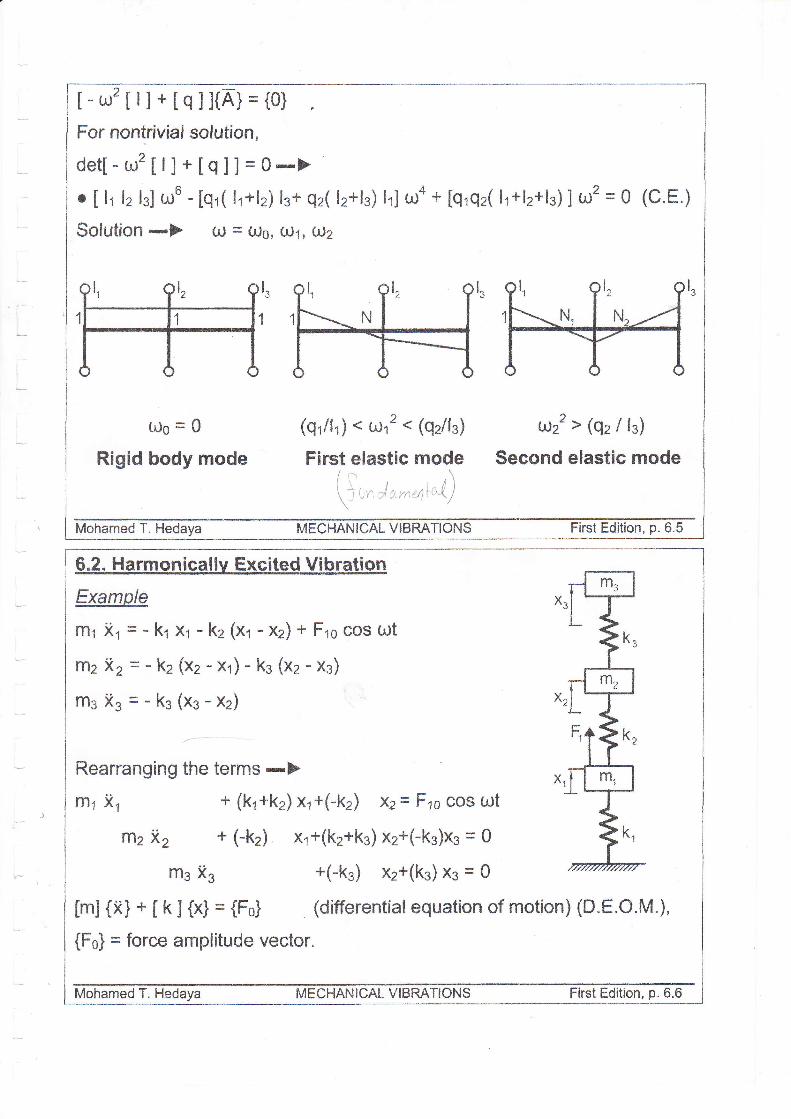
[-ur'1]*tqll{A}={0} t
For nontrivial solution,
. |r iz lsl tr6 - [q,1( 11+12) lr+ Qz( 12+13) 1",] oo + [qrqz( 11+lr+;r; ] trt2 = 0 (C.8.)
t^
Rigid body mode
(q,/1,) . t^t,' . (qzllr)
First elastic modet\\-,, ,!',n' ,tl''l)
t$22 ) (qz / le)
Second elastic mode
Mohamed T. Hedaya MECHANICAL VIBMTIONS First Edition, p. 6.5
6.2. Hjr.rmon icallv Excited Vibration
Exarnple
rflr Xr - - kr Xr - kz (xr - xz) + Fro cos tot
mz xz= - kz (xz - xr) - ks (x2 - &)
msXg--ks(xa-xz)
rTlr Xr + (kr +kz) xt+(-kz) xz= F rc cos trtt
rfiz xz + (-kz) x1+(kr+k3) x2+(-k3)xs = 0
rns Xs +(-ks) x2+(k3) Xe = 0
lml {x} + [ k ] {x} = {Fo} (differential equation of motion) (D"E.O.M.),
{Foi = force amplitude vector.
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.6.6
lml {x} * [kI {x} = {Fo} (D"E.O.M.)
Assume the steady state solution
{x} = {X} cos rrrt,
tz(t t)l {X} = {Fo} (1), tz(t t)] = im'edance matrix
. Equation (1) represents 3 simultaneous linear equations in Xr, Xz, Xa.
Solution gives the values of X1, Xz, Xe.The steady state response is
{x} = {X} cos urt
Rule
For n D.O.F. systems, substitution by {x} = {X}cos rrrt gives n simultaneous
llnear equations in the amplitudes Xr, X2, ... Xn.
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 6.7
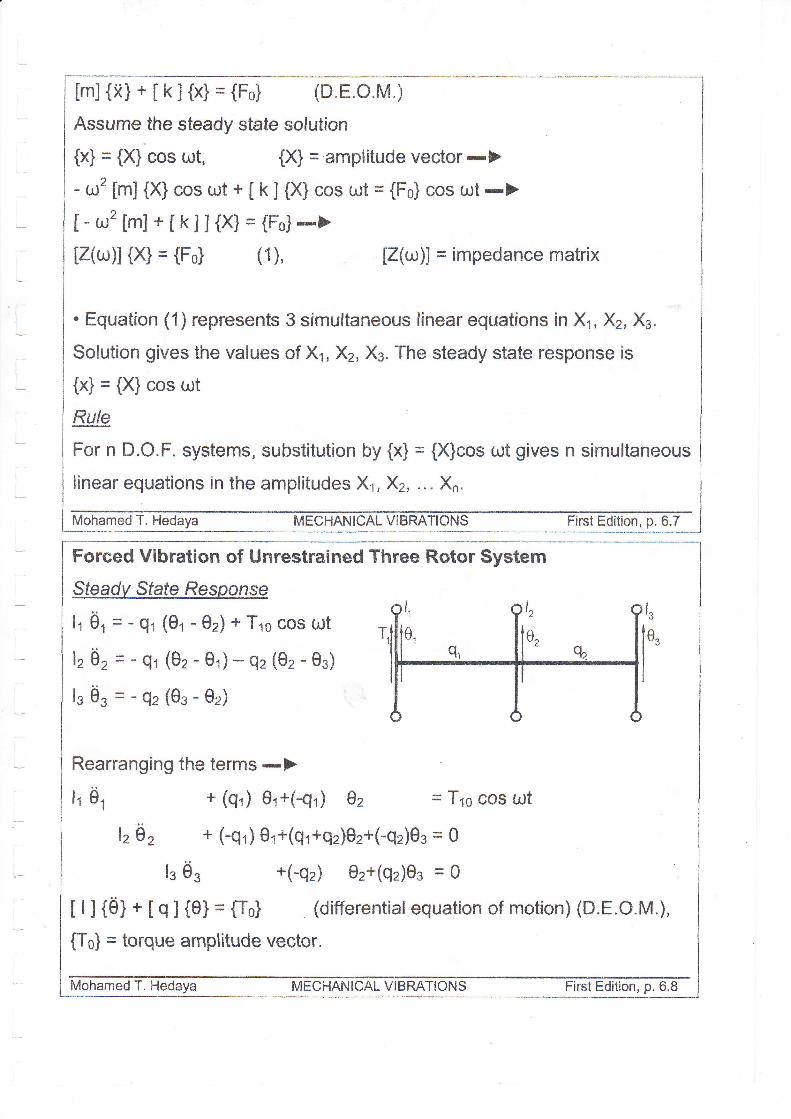
Forced Vibration of Unrestrained Three Rotor System
Sfeady Sfafe Response
1., 6r = - Qr (0r - 0z) + Tro cos t'ot
l, 0, = - q, (02 - 0r) - q, (02 - 0s)
lsBs=-Qz(0s-0:)
+ (q,) 0r+(-qr) 0, = Tro cos trtt
lr dz + (-q,) 0r+(qr+qz)02+(-qz)0s = 0
lr or
+(-qz) 02+(Q2)0s = Q
t ll{6} + [ q ]t0] = {To} (differential equation of motion) (D.E.O.M.),
tTo) = torque amplitude vector.
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 6.8
ls 0r
I:-
ir l',tt (t,. inlntur--* -..-.--*i r---- --] I O[r \ t'L'
6 ,b\/.a klr It()r u?l
fo ll
l-.-I- I
-q{l
sha? t^*)I \--l l:L
,0l orAx< \ {cs'"4'
I
=Lr9, =
{o rgu'x tr *"'"
o (O'L=--rr^'
"*.*L t fo
A\}Vrl'-t-ln L
\
i ,r1
l.t\zlD
A
I
T
^lL)ta .+ 5s
,-t^tu a
:l,?
rD r- iu,^,
\,," 4;.", ,4
,rln,n., q 'T['
I61t.." [,.^
Jr, ,ri ^
' 5-sn ''itr
i -.{..,\'-,.
t I I {6} * [q] te] = fi-o] (D.E.o.M.),
Assume the steady state solution
{0} = {00} cos rrlt,
[ - ur' I I J + t q ] I {00} = {To}-}
tz(t^:)l {00} = fl-o} [Z(to)] = im'edance matrix
. Equation (2) represents 3 simultaneous linear equations in 0ro, 0zo, Oso,
Solution gives the values of 01s, 0zo, Oeo. The steady slate response is
{0} = {00} cos r,,rt
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p. 6.9
Dynamfc looues on Shafts
Dynamic torque exerted by l, on shaft (1) (Tor) = q, (0, - 0r)
I Tor = Toro CO$ ut, r Toro = Qr (0ro - 0zo)
Dynamic torque exerted by lz on shaft (2) (Toz) = Qe (02 - 0g)
o Toz = Tozo COS tJt, r Tczo = 9e (0zo - Oso)
Ad d it i o n al a Stati cJo rq u e
Total torque on each shaft is obtained from the relation,
total torque = static torque + dynamic torque
Iorsrbnal Sfresses in Shafrs
Each torque produces torsional stress in the shaft given by , = J 6I .
lr d"
Mohamed T. Hedaya MECHANICAL VIBRATIONS First Edition, p.6.10
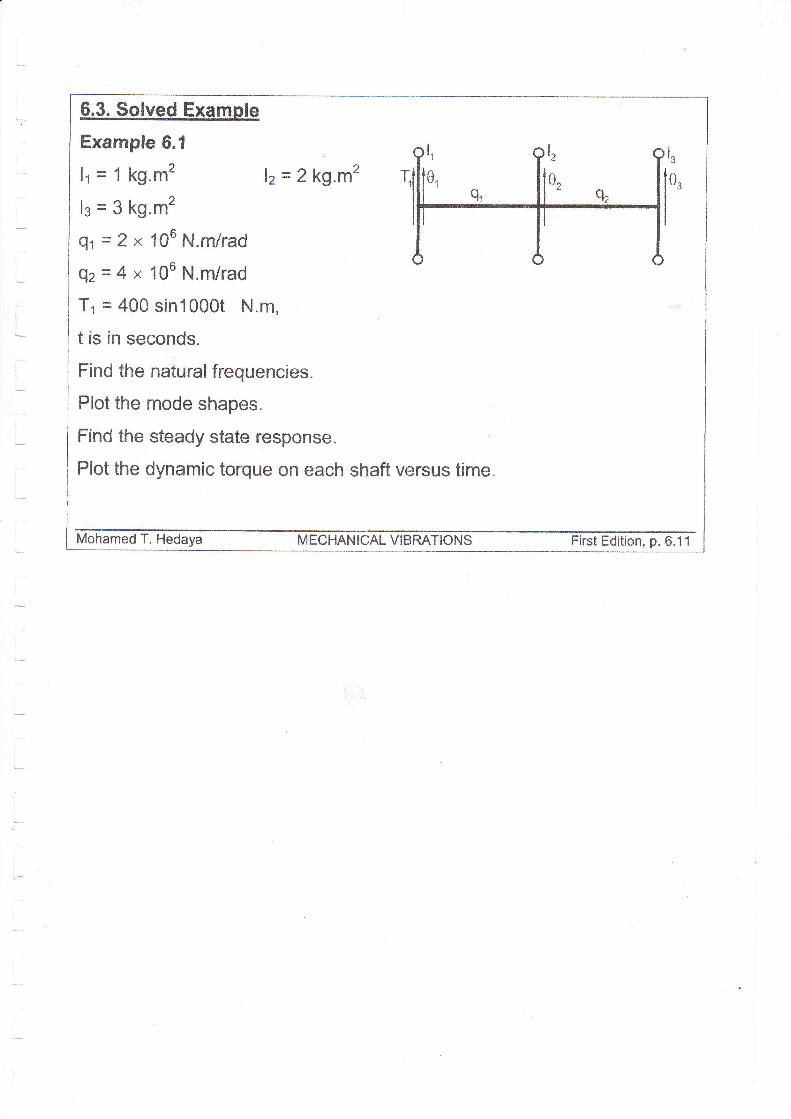
6.3. Solved Example
Example 6.1
lr = 1 kg.m' lz=Zkg.m'
ls = 3 kg.m'
et=2x 106N.m/rad
Qz=4x106N.miradTr = 400 sin1000t N.m,
t is in seconds.
Find the natural frequencies.
Plot the mode shapes.
Find the steady state response.
Plot the dynamic torque on each shaft versus tirne.
t^
le,
I
Mohamed T. Hedaya MECHANICAL VIBRAT|ONS First Edition, p. 6.11







