
CHIRPLET SIGANL DECOMPOSITION OF ULTRASONIC SIGNAL:
ANALYSIS, ALGORITHMS AND APPLICATIONS
BY
YUFENG LU
Submitted in partial fulfillment of the requirements for the degree of
Doctor in Philosophy in Electrical Engineering in the Graduate College of the Illinois Institute of Technology
Approved _________________________ Adviser
Chicago, Illinois May 2007

iii
ACKNOWLEDGEMENT
I would like to express my sincere gratitude and appreciation to my advisor, Dr.
Jafar Saniie, for his encouragement, motivation, inspiration, guidance and friendship
throughout all phases of my Ph.D study at Illinois Institute of Technology. I am very
grateful to my defense committee members: Dr. Guillermo E. Atkin, Dr. Erdal Oruklu,
and Dr. Xiangyang Li, for their valuable comments and suggestion on this work. I am
also thankful to my colleagues and friends: Dr. Ramazan Demirli, Dr. Guillerme
Cardoso, Dr. Fernando Martinez Vallina, and Mr. Logan Sorenson, in particular, to
Ramazan and Guillerme for their valuable discussion to enhance the work, to Logan for
the collaboration in the hardware implementation chapter.
I would like to dedicate the work to my family: my wife, my parents, and my
sister. This work would not be possible without their years of constant support,
encouragement and love. The special thanks to my wife, Jie Jiao for the endless patience
and understanding. The work witnesses the days from China to United States, from
Syracuse to Chicago.

iv
TABLE OF CONTENTS
Page
ACKNOWLEDGEMENT ....................................................................................... iii
LIST OF TABLES ................................................................................................... vii
LIST OF FIGURES ................................................................................................. viii
ABSTRACT ............................................................................................................. xi
CHAPTER
1. INTRODUCTION ................................................................................ 1
1.1 Brief Introduction to Research .................................................... 1 1.2 Thesis Outline ............................................................................. 2
2. REVIEW OF TIME FREQUENCY REPRESENTATION .................... 5
2.1 Introduction ................................................................................. 5 2.2 Short time Fourier transform ...................................................... 6 2.3 Wigner-Ville distribution ............................................................ 9 2.4 Continuous wavelet transform ................................................... 11 2.5 Summary ..................................................................................... 13
3. CHIRPLET SIGNAL DECOMPOSITION ............................................. 15
3.1 Introduction ................................................................................. 15 3.2 Successive parameter estimation algorithm ................................ 17 3.3 Windowing algorithm ................................................................. 25 3.4 Comparison with Gabor Decomposition Algorithm .................. 30 3.5 Summary ..................................................................................... 31
4. SIGNAL DECOMPOSITION BASED ON MATCHING PURSUIT 36
4.1 Introduction .................................................................................. 36 4.2 MPSD-MLE Algorithm ............................................................... 37 4.3 MPSD-MAP Algorithm ............................................................... 46 4.4 Summary ...................................................................................... 53
v
5. COMPARITIVE STUDY OF CTSD AND MPSD ALGORITHMS ...... 54
5.1 Introduction ................................................................................. 54 5.2 Derivation of Cramer-Rao Lower Bounds .................................. 55 5.3 Monte Carlo Simulation .............................................................. 59 5.4 Observation and Analysis ........................................................... 60 5.5 Summary ..................................................................................... 61
6. TARGET DETECTION OF ULTRASONIC BACKSCATTERED
SIGNAL .................................................................................................. 64
6.1 Introduction ................................................................................. 64 6.2 Real Time Ultrasonic Measurement System .............................. 64 6.3 Target Detection in Ultrasonic Backscattered Signal ................. 67 6.4 Bat Chirp Signal Analysis ........................................................... 75 6.5 Summary ..................................................................................... 76
7. STATISTICAL EVALUATION USING ULTRASONIC GRAIN
SIGNAL ................................................................................................... 83
7.1 Introduction ................................................................................. 83 7.2 Ultrasonic Backscattered Model ................................................ 84 7.3 Grain Size Evaluation Using Ultrasonic Backscattered Echoes ........................................................................................ 87 7.4 Summary ..................................................................................... 93
8. ULTRASONIC REVERBERANT APPLICATION ............................... 94
8.1 Introduction ................................................................................. 94 8.2 Reverberant Signal Model for Multilayered Structures ............. 95 8.3 Experimental Reverberant Signal Analysis ................................ 101 8.4 Summary ..................................................................................... 108
9. EMBEDDED SIGNAL DECOMPOSITION SYSTEM
IMPLEMENTATION... ........................................................................... 109
9.1 Introduction ................................................................................. 109 9.2 Embedded DSP System Based on Xilinx Virtex II Pro FPGA. . 110 9.3 Summary ..................................................................................... 114

vi
10. CONCLUSION ....................................................................................... 116
BIBLIOGRAPHY .................................................................................................... 120
vii
LIST OF TABLES
Table Page
3.1 Parameters of Decomposed Echoes (CTSD Method) ..................................... 32 3.2 Parameters of Decomposed Echoes (Gabor Decomposition Method) ............ 33 4.1 Parameters of Decomposed Echoes for the Simulated Chirp Signal (MPSD-MLE Algorithm) ................................................................................ 45 4.2 Parameters of Decomposed Echoes for the Simulated Chirp Signal (MPSD-MAP Algorithm) ................................................................................ 51 5.1 Comparison of the CRLB’s with the Variances of CTSD and MPSD for Different SNR. ................................................................................................ 62 6.1 Parameter Estimation Results for Ultrasonic Signal (CTSD Algorithm). ...... 71 6.2 Parameter Estimation Results for Ultrasonic Backscattered Signal (MPSD Algorithm). ......................................................................................... 74 6.3 Parameter Estimation Results for Bat Chirp Signal (CTSD Algorithm). ....... 79 6.4 Parameter Estimation Results for Bat Chirp Signal (MPSD Algorithm). ....... 82 7.1 Scattering Coefficients as a Function of Mean Grain Diameter and Frequency. ....................................................................................................... 86 7.2 Upward Frequency Observed for Grain Signal from Steel Specimens. .......... 93 8.1 Parameter Estimation Results for Multilayered Echoes .................................. 104 8.2 Estimated Coefficients of Reverberant Echoes ............................................... 105 8.3 Thickness Estimation of Multilayered Structure ( 31 ≤≤ k ) ................... 107
viii
LIST OF FIGURES
Figure Page
2.1 Comparisons of Time Frequency Techniques. a) a Simulated Signal. b) WVD of the Signal. c) STFT of the Signal (Using Hamming Window). d) CWT of the Signal (Using Morlet Wavelet). ............................................ 14
3.1 The Flowchart of CTSD Algorithm ................................................................ 28 3.2 Basic Illustration of Dominant Echo Windowing Method. a) CT of Three Interfering Chirp Echoes. b) Projection in Frequency Domain and the Frequency Window Boundary Points (Dashed Lines). c) Projection in Time Domain and the Time Window Boundary Points (Dashed Lines) ................. 29 3.3 Simulated Ultrasonic Highly Overlapping Echoes(Solid Line), Superimposed
with the Reconstructed Signals by CTSD Algorithm and Gabor Decomposition Method. ........................................................................................................... 34
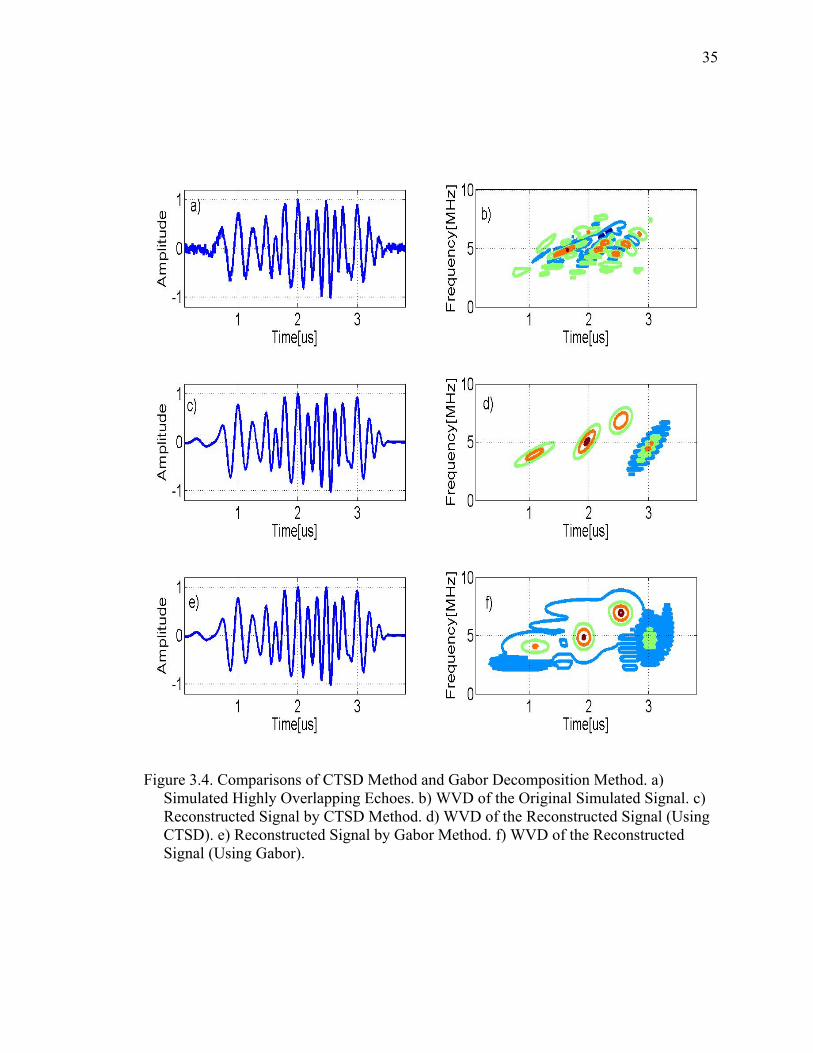
3.4 Comparisons of CTSD Method and Gabor Decomposition Method. a) Simulated
Highly Overlapping Echoes. b) WVD of the Original Simulated Signal. c) Reconstructed Signal by CTSD Method. d) WVD of the Reconstructed Signal (Using CTSD). e) Reconstructed Signal by Gabor Method. f) WVD of the Reconstructed Signal (Using Gabor)... ........................................................... 35
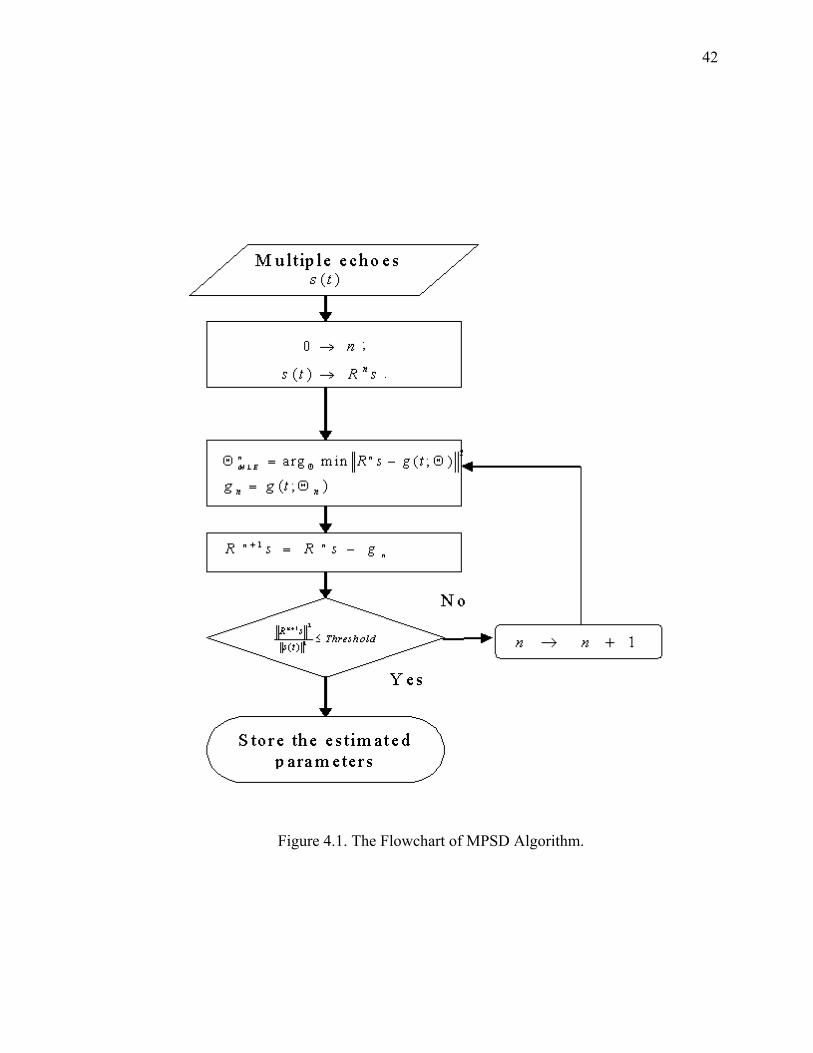
4.1 The Flowchart of MPSD Algorithm. .............................................................. 42 4.2 Overlapping Chirp Signal Superimposed with the Reconstructed Signal Using
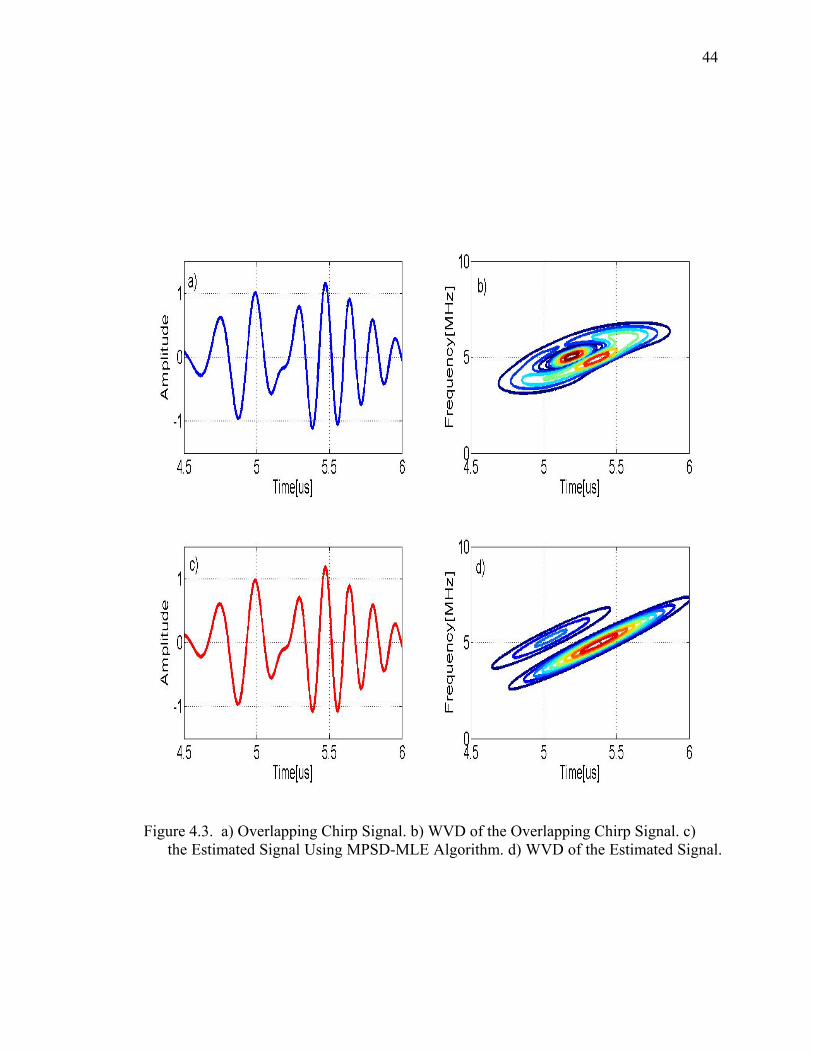
MPSD-MLE Algorithm. ................................................................................. 43 4.3 a) Overlapping Chirp Signal. b) WVD of the Overlapping Chirp Signal. c) the Estimated Signal Using MPSD-MLE Algorithm. d) WVD of the Estimated Signal. ............................................................................................................. 44 4.4 Overlapping Chirp Signal Superimposed with the Reconstructed Signal Using
MPSD-MAP Algorithm. ................................................................................. 49 4.5 a) Overlapping Chirp Signal. b) WVD of the Overlapping Chirp Signal. c) the Estimated Signal Using MPSD-MAP Algorithm. d) WVD of the Estimated Signal. ............................................................................................................. 50 5.1 a) Input SNR vs. Output SNR for a Single Noisy Chirp Echo Using CTSD Algorithm. b) Input SNR vs. Output SNR for a Single Noisy Chirp Echo Using MPSD Algorithm. ............................................................................................ 62 6.1 Real Time Ultrasonic Measurement System. .................................................. 66

ix
6.2 Ultrasonic Backscattering Signal Superimposed with the Reconstructed Signal (CTSD Algorithm) ............................................................................... 67 6.3 a) Ultrasonic Backscattering Signal. b) TF representation of the Ultrasonic Backscattering Signal. c) Estimated Signal Using CTSD Algorithm. d) TF Representation of the Estimated Signal. ......................................................... 70 6.4 Ultrasonic Backscattering Signal Superimposed with the Reconstructed Signal (MPSD Algorithm) .............................................................................. 72 6.5 a) Ultrasonic Backscattering Signal. b) WVD of Ultrasonic Backscattering Signal. c) the Reconstructed Signal. d) WVD of the Reconstructed Signal Using MPSD Algorithm. ................................................................................ 73 6.6 Experimental Bat Chirp Signal Superimposed with the Estimated Result (CTSD Algorithm). ......................................................................................... 77 6.7 a) Experimental Bat Chirp Signal. b) TF Representation of the Experimental Bat Chirp Signal. c) Estimated Signal. d) TF Representation of the Estimated Signal. .............................................................................................................. 78 6.8 Experimental Bat Chirp Signal Superimposed with the Estimated Result (MPSD Algorithm). ......................................................................................... 80 6.9 a) Experimental Bat Chirp Signal. b) WVD of Bat Chirp Signal. c) the
Reconstructed Signal. d) WVD of the Reconstructed Signal Using MPSD Algorithm. ...................................................................................................... . 81
7.1 Microscopes of Specimens. a) Steel-ref. b) Steel-1600. c) Steel-1900. .......... 89 7.2 Grain Signals of Steel Specimens. (I) Shows Grain Signal. (II) Shows Magnitude Spectrum. a) Steel-ref. b) Steel-1600. c) Stell-1900. .................... 91 8.1 Reverberation Path in Signal Thin Layer. ....................................................... 96 8.2 Multilayered Structures Consisting of Four Different Regions. ..................... 97 8.3 Variation of Wave Paths with Equivalent Traveling Time for Case Where k=2 and L=2. ................................................................................................... 98 8.4 The Reconstructed Reverberant Echoes Superimposed with the Experimental Reverberant Echoes of Multilayered Structure. .............................................. 103 8.5 Comparison of Envelope of Class “a” Echoes, “b” Echoes and “c” Echoes. . 106
x
9.1 Architecture Overview of Embedded FPGA-Based System........................... 113 9.2 Process Experimental Ultrasonic Echoes on FPGA-Based DSP System ....... 115

xi
ABSTRACT
A major and challenging problem in ultrasonic nondestructive evaluation (NDE)
is the ultrasonic backscattered signal analysis in presence of high scattering noise. The
pattern of Ultrasonic backscattered signal represents the shape, size and orientation of
ultrasonic reflectors and the physical property of propagation path. The signal loss by the
effect of scattering and absorption imposes a limit on the detection capability of
ultrasonic NDE systems. Therefore, signal modeling and parameter estimation of the
nonstationary ultrasonic signal is critical for precise evaluation of objects.
Joint time-frequency signal representation is an important method to evaluate the
nonstationary characteristic of ultrasonic backscattered signal. It can be shown that the
conventional time frequency transform such as Wigner Ville Distribution and Short time
Fourier transform introduce cross-terms , offer poor resolution, and are sensitive to noise
level. On the other hand, the continuous wavelet transform shows higher time resolution
in smaller scale and higher frequency resolution in high scale. This is a preferable
property for tracking the time-varying frequency of nonstationary signal, especially in
ultrasonic model based algorithm design.
In this study, we introduced chirplet transform (CT) as a means not only to obtain
time frequency representation of signal, but also to be utilized for chirplet signal
decomposition and successive parameter estimation. Based on the assumption that the
signal to be processed, no matter how complex, can be decomposed into superimposition
of multiple chirplet echoes, the chirplet signal decomposition based on chirplet transform
(CTSD) algorithm is developed. It utilizes the chirplet transform of signal to locate the
most dominant chirplet component and successively estimate its parameters, such as
xii
time-of-arrival, center frequency, chirp rate, phase and intensity. Compared with signal
decomposition based on Gabor function, the chirplet signal decomposition algorithm is
very effective in representing dispersive ultrasonic echoes due to the parameter diversity
of chirplets. Analysis and simulation results show that the performance of chirplet signal
decomposition overwhelms that of the Gabor decomposition with less number of
components to reconstruct the same high overlapping signal.
As an alternative, we developed matching pursuit signal decomposition(MPSD)
algorithm through incorporating statistical methods such as Maximum Likelihood
Estimation (MLE) and Maximum a Posteriori (MAP) into a general nonstationary signal
analysis frame work (i.e., matching pursuit algorithm). The MPSD algorithm iteratively
optimizes the parameters of a chirplet function to match the signal and achieve high
resolution decomposition. This approach avoids the exhaustive search of a large number
of dictionary functions and leads to a more efficient implementation.
Furthermore, we derived analytical Cramer Rao Lower Bound (CRLB) of chriplet
estimator. The performance of CTSD and MPSD algorithm are evaluated against the
CRLB bounds. Computer simulation indicates noise is better suppressed in CTSD
algorithm than it is in MPSD algorithm. Monte Carlo analysis shows that both algorithms
are minimum variance unbiased (MVU) estimators, hence they provide optimal
parameter estimation and robust chirplet signal decomposition.
We also explored different applications of the chirplet signal decomposition
approaches. The estimated parameters from the experimental signals have been
successfully used to locate the target echo in ultrasonic reverberant signal, evaluate grain
size of materials, and classify ultrasonic multilayered reverberant echoes. Moreover, an
xiii
embedded hardware system is implemented on Xilinx Virtex II Pro FPGA platform to
accelerate the chirplet signal decomposition algorithm. Through computer simulation and
analysis of experimental signals, this type of study addresses a broad range applications
including target detection, deconvolution, object classification, velocity measurement,
and ranging system.
1
CHAPTER 1
INTRODUCTION
1.1 Brief Introduction to Research
Ultrasonic waves have been applied in testing and imaging of material for a long
time. In the ultrasonic pulse-echo testing, ultrasonic signal travels through medium
without changing their physical states. The signal undergoes an energy loss due to
absorption and scattering of the internal microstructure on the propagation path. Hence,
the information of microstructure is inherent to the measured backscattered ultrasonic
signal. It can be utilized to characterize the propagation path which determines the
physical properties of reflectors, in terms of their location, geometric shape, size,
orientation and microstructure. Through the signal analysis, the useful feature of the
medium can be extracted. This is the property that supports the broad applications of
ultrasound in non-destructive evaluation (NDE) of material, and medical diagnosis.
The extraction of the desired information related to the properties of the medium
requires models to simulate the formation of echoes. From system point of view, the
measured backscattered signal can be simplified as the convolution result of input signal
(i.e., the transducer excitation pulse) and system response. The parameters of the
backscattered echoes such as time-of-arrival, center frequency, amplitude, bandwidth,
phase, and chirp rate are of important for their significance to dissolve the system
response. For example, the time-of-arrival and amplitude of the echo can be attributed to
the target response in term of target location, size and orientation. The variation of time-
of-arrival and amplitude can be attributed to the energy loss and the traversed time. The
center frequency, bandwidth and the phase of the echo can be attributed to the frequency
2
modification of the propagation path (i.e. characterization of media impedance). The
chirp rate can be attributed to the dispersion phenomenon in the traveling of ultrasonic
wave.
In this research, to form an efficient way to model the ultrasonic backscattered
echoes, we propose chirplet signal decomposition algorithm based on the chirplet
transform. The mathematical foundation of the algorithm is discussed. Another
decomposition implementation scheme which is based on the matching pursuit
framework is compared and discussed. The analytical Cramer-Rao bounds of the
algorithms are explored and compared with the simulated results. Furthermore, the
proposed algorithm is tested and verified in the different applications such as target
detection, bat chirp signal analysis, material grain size evaluation, and multilayered
structure inspection. Furthermore, an embedded FPGA-based DSP system for signal
decomposition is analyzed.
1.2 Thesis Outline
Chapter 2 presents a brief review concerning time frequency representation. Three
notably used time frequency representations such as short time Fourier transform,
Wigner-Ville distribution, and continuous wavelet transform are outlined. The time
resolution and frequency resolution of the three time frequency representations are
discussed.
Chapter 3 lays out the mathematical foundation of chirplet signal decomposition.
The basic idea behind the chirplet signal decomposition is to decompose any complex
signal into a linear combination of chirplet model and estimate all the parameters of the

3
model precisely. First, the chirp signal and its application background are presented.
Then, the successive parameter estimation algorithm based on chirplet transform is
elaborately derived with mathematical details. Furthermore, a windowing strategy is
applied in both time domain and frequency domain to generalize the successive
parameter estimation algorithm to decompose multiple high overlapping signals. In order
to demonstrate the robustness of chirplet model and the efficiency of chirplet signal
decomposition algorithm, we simulate a signal with multiple highly-overlapping echoes.
The simulated signal is examined by the chirplet signal decomposition algorithm and
another decomposition algorithm from the literature, which is based on Gabor function.
The performances of these two algorithms are compared with each other and discussed
with details.
Alternatively, Chapter 4 introduces signal decomposition based on matching
pursuit (MPSD) framework. The matching pursuit framework was proposed by Mallat et.
al for non-stationary signal analysis. In the original matching pursuit algorithm, it uses
correlation criteria to search the best matching function in dictionaries. It has been
reported that this criterion obtains decompositions adaptive to global signal
characteristics. Since in some applications, it is preferable to be best adapted to the local
structures of signal, we incorporate the statistical analysis tools such as Maximum
Likelihood Estimation and Maximum a Posteriori into the implementation of
decomposition. The implementation details of the algorithms and simulation results are
discussed in Chapter 4. To benchmark the proposed signal decomposition algorithms,
Chapter 5 explores the analytical lower bound, i.e., the Cramer-Rao lower bound (CRLB).
4
We evaluate the performance of the signal decomposition and parameter estimation
algorithms against the analytical CRLB bounds through Monte Carlo simulation.
Chapter 6 presents the applications of the chirplet signal decomposition algorithm
and the signal decomposition based on matching pursuit in ultrasonic target detection and
bat chirp signal analysis. Chapter 7 introduces the application of material grain size
evaluation. The chirplet signal decomposition algorithm is applied to estimate the grain
size of materials which are processed under different heat treatment condition. As another
important aspect of ultrasonic nondestructive evaluation, Chapter 8 lay out the discussion
of the multilayered reverberant structures. The proposed algorithm is evaluated by
ultrasonic multilayered reverberant echoes. To verify the feasibility of hardware
implementation and acceleration of the algorithm, In Chapter 9, an embedded hardware
design of signal decomposition algorithm is analyzed and implemented on Xilinx Virtex
II Pro Field Programmable Gate Array (FPGA) Platform. Finally, Chapter 10 summaries
the research of chirplet signal decomposition algorithm and its applications.

5
CHAPTER 2
REVIEW OF TIME-FREQUENCY REPRESENTATION
2.1 Introduction
In this chapter, the background of time-frequency representation is reviewed.
Then three commonly used methods of time-frequency signal representation such as short
time Fourier transform, Wigner Ville distribution and continuous wavelet transform are
introduced. The time resolution and frequency resolution are discussed and compared
among the three time frequency representations.
The need for time-frequency representation is from the nonstationary nature of
most signals in real world. Usually it is inadequate to fully describe the signal using
either time domain or frequency domain analysis. Time-frequency representation is a
useful tool for simultaneous characterization of a signal in time and frequency domain. It
provides information about how the spectrum of the signal changes with time, thus
leading to accurately describe, analyze and interpret the nonstationary signal. The time-
frequency process is performed by mapping the signal from time domain, where the
signal is one-dimensional, into a two dimensional expression (i.e., time frequency
domain). A variety of methods for obtaining time frequency representation have been
devised, most notably the short time Fourier transform (STFT), the Wigner-Ville
distribution (WVD) and the continuous wavelet transform.

6
2.2 Short Time Fourier Transform (STFT)
During the 1940s, the motivation to analyze the human speech, which is
nonstationary and rapidly varying spectral components, led to the invention of sound
spectrogram (i.e., STFT). In order to analyze such a non-stationary signal, it is
reasonable to apply a small window along time axis in order to examine the frequency
content of the signal in the given time window. The STFT aims to obtain the short time
Fourier transform of a signal by sliding a time window and then taking the Fourier
transform of the windowed signal. In doing so, it is assumed that the signal is stationary
during the duration of the time window. The STFT of a signal can be expressed as:
( ) ∫+∞
∞−
−−= dtettgtftSTFT tif
0)()(, 000ωω (2.1)
Here, )( tg is a normalized real and symmetric window
)()( tgtg −= , 1)( =tg (2.2)
Using different type windows result in different TF representations. Since there
already have extensive research efforts in the classic signal processing field, such as
efficient implementation of Fourier transform, correlation and filter design theory in past
years, they can be imported into the implementation of STFT.
The downfall of STFT is from the windowing process, which leads to inherent
trade off between time resolution and frequency resolution. The resolution problem of
STFT can be revealed by the following expression of time spread tσ and frequency
spread ωσ of the window function )( tg .
Let )(ˆ ωg denote ))(( tgFT , then from properties of Fourier transform,

7
( ) ))((ˆ 0)(
000 ttgFTeg it −=− −− ωωωω (2.3)
Hence, the time spread tσ and frequency spread ωσ are
( ) ( )
( )∫∫
∞+
∞−
+∞
∞−
−
=
−−=
dttgt
dtettgtt tit
22
2
02
02 0ωσ
(2.4)
( ) ( )
( )∫
∫∞+
∞−
+∞
∞−
=
−−=
ωωωπ
ωωωωωπ
σ ωω
dg
deg ti
22
2
02
02
ˆ21
ˆ21
0
(2.5)
From Equation 2.4 and Equation 2.5, it can be seen that the spreads are independent of
the time shift, 0t , and the frequency shift, 0ω . Therefore, STFT has the same time
resolution and the same frequency resolution across time frequency plane. Can the time
resolution and the frequency resolution of STFT both be arbitrarily small to reveal the
non-stationary property of signal? Unfortunately, Heisenberg uncertain principle limits
the scheme.
Heisenberg uncertainty principle [Mal99] expresses a fundamental relationship
between the time spread and the frequency spread of the windowed signal. It states the
mathematical fact that a narrow waveform yields a wide spectrum and a wide waveform
yields a narrow spectrum. Both the time waveform and the frequency spectrum can not
be made arbitrarily small simultaneously.
The Heisenberg uncertain principle can be derived as following. Given a
signal ( ) ( )RLtf 2∈ , the mean and variance of signal in time domain and frequency
domain can be expressed as following.
8
Mean in time domain ( )∫+∞
∞−= dttft
fu 2
2
1
Mean in frequency domain: ( )∫+∞
∞−= ωωω
πξ df
f
2
2ˆ
21
Variance in time domain: ( ) ( )∫+∞
∞−−= dttfut
ft
222
2 1σ
Variance in frequency domain: ( ) ( )∫+∞
∞−−= ωωξω
πσω df
f
222
2 ˆ2
1
Hence,
( ) ( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( )[ ]
( )( ) 2'2
4
2'**'
4
2'
4
2'2
4
22
422
41
21
*1
1
ˆ2
1
⎥⎦⎤
⎢⎣⎡≥
⎥⎦⎤
⎢⎣⎡ +≥
⎥⎦⎤
⎢⎣⎡≥
=
=
∫
∫
∫
∫∫
∫∫
∞+
∞−
∞+
∞−
∞+
∞−
∞+
∞−
∞+
∞−
+∞
∞−
+∞
∞−
dttftf
dttftftftftf
dttfttff
dttfdtttff
dfdtttff
t ωωωπ
σσ ω
(2.6)
Since ( ) 0lim =∞→ tftt
( )( )
( )
414
1
41
22
4
2'24
22
≥
⎥⎦⎤
⎢⎣⎡≥
⎥⎦⎤
⎢⎣⎡≥
∫
∫∞+
∞−
∞+
∞−
dttff
dttftf
t ωσσ
(2.7)

9
The principle shows that there is a lower bound of ωσσ t .
Through the above discussion of time resolution and frequency resolution, it can
be seen that in STFT, the resolutions solely depend on the resolution property of the short
time window. The inherent lower bound of Heisenberg principle determines the tradeoff
between time resolution and frequency resolution of STFT. For a non-stationary signal,
it is always problematic to find an appropriate type and size of the window to fit the
specific signal analysis in STFT of signal. To demonstrate the STFT of a signal, Figure
2.1a shows a simulated ultrasonic signal consisting of two chirp echoes. Figure 2.1c
shows the STFT of the signal in Figure 2.1a using Hamming window.
2.3 Wigner-Ville Distribution (WVD)
Another well-known time frequency representation, Wigner-Ville Distribution
(WVD), has been received research attention for many years. In 1932, Wigner presented
a joint probability function for the coordinates and moment in the study of statistical
quantum mechanics [Wig32]. Ville derived the Wigner distribution for analytic signals
in 1948, which is known as Wigner-Ville distribution (WVD) [Vil48]. In 1946, Gabor
presented the method to expand the given signal into a sum of elementary signals of
“minimum” spread in time and frequency [Gab46]. In 1966, Cohen generalized time-
frequency representation into different distribution functions [Coh89].
A great interest was shown in time-frequency analysis in the 1980’s when a large
number of researchers started exploring the field of time frequency representation in
signal processing area [Coh89]. In the implementation of discrete Wigner-Ville
distribution, Classsen discussed the sampling rate to avoid aliasing [Cla80]. Boualem

10
Boashash et. al made a significant contribution towards Wigner-Ville analysis of time
varying signals, non-stationary random signals, cross spectral analysis, estimation and
interpretation of instantaneous frequency[Boa03].
The WVD of signal can be expressed as
∫∞+
∞−
−⎟⎠⎞
⎜⎝⎛ −⎟
⎠⎞
⎜⎝⎛ += τττω τω detftftWVD i
f0
22),( 0
*000 (2.8)
From the analysis of STFT in Section 2.2, it can be seen that the time and
frequency resolution is limited by the resolution of correlated window ( )tg in STFT. But
in WVD representation of signal, it is calculated by correlating the signal with a time and
frequency translation of the signal. From Equation 2.8, it can be seen that the time
resolution and frequency resolution are solely determined by the signal ( )tf itself.
Hence the WVD representation does not have the resolution loss from windowing.
Although WVD has excellent time and frequency resolution, the quadratic
property of WVD is that the cross terms (i.e., artifacts) are introduced when dealing with
multi-component signals. The artifacts lead to an erroneous interpretation of the time
frequency representation of the signal. The cross terms indicate that the time-frequency
energy is distributed to the place where the signal doest not really exist on the joint time-
frequency domain. To demonstrate the cross terms problem of WVD representation in
the case of multi-component signal, an example is demonstrated in the Figure 2.1. Figure
2.1a is the simulated multi-component signal. Figure 2.1b clearly shows the cross term
between these two components of the signal.
Many researchers worked on the problem of cross-terms in WVD by smoothing,
windowing, interpolating, filtering in time domain, frequency domain, or joint time-

11
frequency domain so that to attenuate the cross terms [And87, Gre96, and Oeh97].
Usually, the suppression and elimination of the cross-terms is achieved at the cost of
marginal properties and computation.
2.4 Continuous Wavelet Transform (CWT)
In the STFT implementation, a window is designed to slide along the time axis.
Once the window is chosen, the time resolution and the frequency resolution are fixed. In
certain applications, it is more desirable to have better time resolution at higher
frequencies than that at lower frequency. As a result of this characteristic, wavelet
transform have become a useful tool for non-stationary signal analysis. Since wavelet
theory were developed independently in multiple fields such as mathematics, quantum
physics, and electrical engineering, it is difficult to track a unique origin of wavelet
theory.
In 1984, Grossman and Morlet broadly defined wavelets in the context of
quantum physics. They discussed decomposition of hardy functions into square
integrable wavelets of constant shape [Gro84]. In 1985, Stephane Mallet gave wavelets
an ice-break jump through his work in digital signal processing [Mal89, Mal99]. For the
first time, he discovered some relationship between quadrature mirror filters, pyramidal
algorithm, and orthonormal wavelet bases. After that, many researchers such as Meyer,
Ingrid Daubechies worked out many sets of wavelets [Dau92, Mey93].The continuous
wavelet transform, discrete wavelet transform, and the fast implementation of wavelet
transform have been extensively explored by researchers. The wavelets have been
applied to a broad range of applications such as denoising, compression, spectral

12
estimation, pattern recognition, human vision, radar and sonar etc [Dau90, Mal91, Ant92,
Rod98, Zen01, and Cha06]. Wavelet becomes a general mathematical tool in the similar
way as the Fourier transform does. Nevertheless, we are not going to discuss the discrete
wavelet transform and the details of different wavelet base functions. We focus on the
similar resolution argument in the introduction of continuous wavelet transform as the
discussion in the STFT and WVD section. Unlike STFT and WVD, continuous wavelet
transform (CWT), through the correlation of the signal with a scaling and translating
function of wavelet ( )tψ , has varying resolution at different scale. The role of scale acts
as the role of frequency in WVD and STFT.
The CWT of signal ( )tf can be expressed as
( )
( ) ( )∫
∫∞+
∞−
∞+
∞−
=
⎟⎠⎞
⎜⎝⎛ −
=
ωωψπ
ψ
ω desstf
dtstt
stfstCWT
ti 0*
0*0
ˆˆ21
1),(
(2.9)
Here ( )tψ satisfies ( )∫+∞
∞−=0dttψ and ( )ωψ̂ denotes ( )( )tFT ψ .
0t denotes the center time of ( )tψ
0ω denotes the center frequency of ( )ωψ̂
tσ denotes the time spread of ( )tψ
ωσ denotes the frequency spread of ( )ωψ̂
Then the time spread of ⎟⎠⎞
⎜⎝⎛ −
stt
s01 ψ is

13
( ) ( ) 222222
0*20
1tsdtttsdt
stt
stt σψψ ==⎟
⎠⎞
⎜⎝⎛ −
− ∫∫∞+
∞−
∞+
∞− (2.10)
and the frequency spread of ( ) 0*ˆ tiess ωωψ is
( )( ) ( )
2
2
20
220
0
2*2
0ˆ
21
ˆ21
ss
ddss
sωσ
ωωψωωπωωψωω
π=
−=⎟
⎠⎞
⎜⎝⎛ −
∫∫
+∞
∞+
(2.11)
Hence the wavelet window ⎟⎠⎞
⎜⎝⎛ −
stt
s01 ψ centered at ⎟
⎠⎞
⎜⎝⎛
st 0
0 , ω in time frequency domain
and the time spread is tsσ , frequency spread issωσ . And the product ωσσ t still keeps
unchanged, which is the inherent property of Heisenberg uncertain principle. It is worth
to point out that the time resolution and frequency resolution depend on the scale s . This
shows higher time resolution in smaller scale and higher frequency resolution in higher
scale. As a comparison, the CWT using morlet wavelet is shown in Figure 2.1d.
2.5 Summary
In this chapter, we reviewed the time frequency representation of signal and
introduced three conventional time frequency representations such as short time Fourier
transform, Wigner-Ville distribution, and continuous wavelet transform. From all the
preliminary analysis, it can be seen that the conventional time frequency representation
such as WVD and STFT introduce cross terms, have poor resolution and are sensitive to
noise level. On the other hand, CWT shows higher time resolution in smaller scale and
higher frequency resolution in higher scale. Hence, it is a preferable property for tracking

14
the time-varying frequency of non-stationary signals, especially in our ultrasonic model
base algorithm design.
Figure 2.1 Comparisons of Time Frequency Techniques. a) a Simulated Signal. b) WVD of the Signal. c) STFT of the Signal (using Hamming Window) d) CWT of the Signal (Using Morlet Wavelet).

15
CHAPTER 3
CHIRPLET SIGNAL DECOMPOSITION
3.1 Introduction
It has been reported [San89, Wan91, and San94] that the broadband ultrasonic
backscattered signal depicts a downward shift in frequency due to signal attenuation. It
means that the higher frequencies are experienced more attenuation than the lower
frequencies. On the other hand, in the Rayleigh region of scattering, an upward trend in
frequency due to scattering is experienced. This implies that the high frequency
components are backscattered with more intensity than the low frequency components.
The echo reflected from a discontinuity (flaw) has lower frequency due to attenuation
effect compared with that of the echoes backscattered from internal microstructure of
materials. Furthermore, dispersion is a phenomenon in which the velocity of sound
depends on its frequency and consequently different frequency components arrive at
different time. Hence, the shift in frequency with depth and the random arrival of
different frequency components with random amplitude in backscattered ultrasonic signal
make it a non-stationary signal. By Fourier analysis, we can decompose signal into
individual different frequency components. However, the spectrum of signal does not
shows how the frequencies evolve with time. Therefore, joint time-frequency (TF)
representation is required by the non-stationary property of ultrasonic backscattered
signal.
Chirp signal is a type of signal that is often encountered in seismic signal, radar,
sonar, speech and ultrasound [Ma98, Fan02, Wan02, Wan03, Zan03, Lu05, and Lu06a].
The chirplet transformation has been applied as a useful and practical method for time-
16
frequency analysis of radar signals [Man92, Man95, Nei99, Qia98, Xia00, and Yin02].
Further implementations and applications of the adaptive chirplet transform for sonar,
speech, CFAR detection, medical signal and seismic signal analysis have been presented
in [Wan00a, Wan00b, Lij03, Lop02, Lop03, and Cui06]. The chirp signal parameters are
very important in analysis the physical interpretation of the signal in these applications.
More recently, a modified continuous wavelet transform (MCWT), which is based on the
Gabor-Helstorm transformation, has been introduced as a means to estimate parameters
of ultrasonic echoes [Car05a, Car05b]. The MCWT decomposition has not been found
effective in representing ultrasonic echoes with chirp characteristics.
Compared with Gaussian Gabor function, chirplet has one more parameter
freedom and thereby can better match chirp signal. Moreover, Gaussian Gabor function is
the special chirplet with zero chirp rates. We introduce a chirplet signal decomposition
algorithm to represent chirp-type signals in terms of Gaussian chirplet, which is sparse
and energy preserving. The sparseness property aims for a compact representation of the
complex signal by decomposing it into a limited number of chirp components. The
energy preservation property, by coherently distributing the signal energy into composing
functions, enables the linear addition of the time-frequency distributions of composing
functions to represent the TF of the signal. Furthermore, once the signal is decomposed
by a family of chirplet echoes, these echoes, individually or collectively can be used to
describe the nonstationary behavior of the signal.
The chirplet signal decomposition method utilizes the chirplet transform and a
successive parameter estimation algorithm. Based on the chirplet transform of the signal,
the algorithm identifies the location and duration of the most dominant chirp component
17
in time frequency domain. Then, a successive parameter estimation algorithm is used to
estimate the parameters of this dominant chirp component. The algorithm can recover
the parameters of a noise-free chirp signal without requiring any initial guess for
parameters. It accounts for a variety of differently shaped echoes, including narrow-
band, broad-band, symmetric, skewed, dispersive or nondispersive.
In this chapter, we first introduce the successive parameter estimate algorithm
and address the details of its mathematical derivation. Moreover, an efficient windowing
method is designed to iteratively handle the echo estimation process of more complex
signals. To compare with the performance of MCWT algorithm, the proposed signal
decomposition based on chirplet transform (CTSD) algorithm is utilized to process the
same high overlapping signal as the MCWT algorithm does.
3.2 Successive Parameter Estimation Algorithm
Under the assumption that the signal to be processed, no matter how complex, it
can be decomposed into the superposition of multiple chirplet echoes. The objective of
the successive parameter estimation algorithm is to efficiently estimate the parameters of
the individual chirp echoes.
In most application case, a single chirp echo can be modeled as
( ) ( ) ( ) ( )( )22
21 2exp ταφτπταβ −++−+−−=Θ tiitfittf c (3.1)
Where ],,,,,[ 21 βφαατ cf=Θ denotes the parameter vector of the chirp echo
τ denotes the time-of-arrival
cf denotes the center frequency

18
1α denotes the bandwidth factor
2α denotes the chirp-rate
φ denotes the phase
β denotes the amplitude
These parameters can be estimated successively using the chirplet transform (CT).
The successive parameter estimation algorithm is a recursive method that starts with a
time-frequency (TF) representation of the superimposed chirp signal based on the CT.
The CT of ( )tf Θ with respect to a chirplet kernel ( )tΘ
Ψ ˆ is defined as
( ) ( ) dtttfCT ∫
+∞
∞− ΘΘ Ψ=Θ )(ˆ *ˆ
(3.2)
Where ⎥⎦⎤
⎢⎣⎡=Θ ηθγγ
πω ,,,,2
,ˆ21
0
ab denotes the parameter vector of chirplet kernel. The
chirplet kernel ( )tΘ
Ψ ˆ is
( ) ( ) ( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛−++⎟
⎠⎞
⎜⎝⎛ −
+−−=ΨΘ
220
21ˆ exp btii
abtibtt γθωγη
(3.3)
Where ( )tΘΨ ˆ* denotes the conjugate of ( )tΘ
Ψ ˆ . In order to normalize the energy of the
chirplet kernel, the term 41
12⎟⎠⎞
⎜⎝⎛=πγη . Hence, the CT of a signal chirp echo ( )tfΘ given by
Equation 3.2 can be expressed as

19
( ) ( )
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
⎥⎥⎥⎥
⎦
⎤
+−+
−⎟⎠⎞
⎜⎝⎛ ++−
+
+−+−+−
−
−+
⎢⎢⎢⎢⎢
⎣
⎡
+−+
⎟⎠⎞
⎜⎝⎛ −
−
+−+=Θ
2211
21210
2211
22121
2211
20
2211
41
1
4exp
12ˆ
γαγα
τγγωααω
γαγατγγαα
θφγαγα
ωω
γαγαπγβ
ii
biiia
i
iibii
iii
a
iiCT
c
c
(3.4)
Where cc fπω 2= . The maximum similarity between the input signal, ( )tfΘ , and the
chirplet kernel, ( )tΘΨ , leads to correct estimation of echo parameters, Θ̂ . It can be
shown that the peaks of TF representation )ˆ(ΘCT of the superimposed signal ( )tfΘ can
be used to estimate the center frequency, cf , and time-of-arrival, τ . To accomplish
this goal, the magnitude of )ˆ(ΘCT is used for estimation of the signal parameters, which
is given by

20
( ) ( ) ( ) ( )[ ]
( )
( ) ( )( )
( )( )
( ) ( )( )( )
( ) ( ) ⎥⎥⎦
⎤
−++
−+++−
−++
−+⎟⎠
⎞⎜⎝
⎛ −−
⎢⎢⎢⎢⎢
⎣
⎡
−++
+⎟⎠
⎞⎜⎝
⎛ −−
−++=Θ−
222
211
21
221
211
221
21
222
211
12210
222
211
211
20
412
222
114
11
4exp
2ˆ
γαγαταγαγγαγα
γαγα
τγαγαω
ω
γαγα
γαω
ω
γαγαπγβ
b
ba
a
CT
c
c
(3.5)
The maximum of the above equation can be obtained by taking partial derivatives
of )ˆ(ΘCT in respect to a (which corresponds to the center frequency, cf ) and b
(which corresponds to the time-of-arrival, τ ).
( ) ( ) ( )( )( ) ( )( )
( )
( ) ( )( ) 02
2ˆ
ˆ
222
211
110
20
222
211
12212
0
=
⎪⎪⎭
⎪⎪⎬
⎫
−++
+⎟⎠
⎞⎜⎝
⎛ −+
⎪⎩
⎪⎨⎧
−++
−+−Θ=
∂
Θ∂ −
γαγα
γαωωω
γαγατγαγαω
caa
baCT
a
CT
(3.6)

21
( ) ( ) ( )( )( ) ( )( )
( )
( ) ( )( ) 04
2ˆ
ˆ
222
211
12210
222
211
221
2111
221
21
=
⎪⎪⎭
⎪⎪⎬
⎫
−++
+⎟⎠
⎞⎜⎝
⎛−
+
⎪⎩
⎪⎨⎧
−++
−+++−Θ=
∂
Θ∂
γαγα
γαγαωω
γαγατγαγαγαγα
ca
bCT
b
CT
(3.7)
The solutions of Equation 3.6 and Equation 3.7 are
τ=b caωω
=0 (3.8)
It is important to point out that under the condition of Equation 3.8, the estimation
of the peak position of )ˆ(ΘCT in TF domain is not a function of the bandwidth factor,
1γ ,chirp-rate, 2γ , and phase, θ of the echo. Furthermore, the peak value of )ˆ(ΘCT is
proportional to the amplitude of the actual echo and leads to the estimation of β .
Based on the above estimations of a and b , the estimation of the chirp-rate, 2γ ,
becomes a one-dimensional estimation problem. This can be achieved by taking the
derivative of )ˆ(ΘCT in respect to 2γ and setting it to 0,
22
( ) ( )( ) ( )( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )( )( ) ( )( )
( ) ( )( )( ) ( ) ( )
( ) ( )( ) ⎥⎥⎦
⎤
−++
−+++−−
−++
−+⎟⎠
⎞⎜⎝
⎛−−
−
−++
+⎟⎠
⎞⎜⎝
⎛−−
−
−++
−+−⎟⎠
⎞⎜⎝
⎛−
−
⎢⎢⎣
⎡
−++
−Θ=
∂
Θ∂
2222
211
21
221
211
221
2122
2222
211
12210
22
2222
211
211
20
22
222
211
212
01
222
211
22
2
2
2
2
2
2ˆ
ˆ
γαγα
ταγαγγαγαγα
γαγα
τγαγαω
ωγα
γαγα
γαω
ωγα
γαγα
ταγτω
ωα
γαγαγα
γ
b
ba
a
bba
CTCT
c
c
c
(3.9)
Hence, the maximum of )ˆ(ΘCT yields the optimal solution of 2γ
( ) ( )( ) ( )
( ) 0ˆ2ˆ
0
0
,222
211
22
,2
=Θ−++
−=
∂
Θ∂
==
==c
ca
b
ab
CTCT
ωω
τ
ωω
τγαγα
γαγ
(3.10)
The solution to Equation 3.10 is
22 αγ = (3.11)

23
Similarly, the estimation of the bandwidth factor, 1γ , is carried out by taking the
partial derivative of )ˆ(ΘCT in respect to the bandwidth factor, 1γ , and setting it to 0.
( ) ( ) ( ) ( )( ) ( )( )
( )
( ) ( )( )( ) ( )( )
( ) ( )
( )
( ) ( )( )( ) ( )( )
( ) ( )( )( )( )( )
( ) ( )( ) ⎥⎥⎦
⎤
−++
−++++−
−++
−+⎟⎠⎞
⎜⎝⎛ −+
−
−++
+⎟⎠⎞
⎜⎝⎛ −
−
−++
−++−⎟⎠⎞
⎜⎝⎛ −
−
−++
+⎟⎠⎞
⎜⎝⎛ −
−
⎢⎣
⎡
−++−+−
Θ=∂
Θ∂
2222
211
21
221
211
221
2111
2222
211
12210
11
2222
211
311
20
222
211
222
21
02
2222
211
11
20
222
2111
222
21
21
1
2
2
2
2
4ˆ
ˆ
γαγα
ταγαγγαγαγα
γαγα
τγαγαωωγα
γαγα
γαωω
γαγα
ταατωωα
γαγα
γαωω
γαγαγγαγα
γ
b
ba
a
bba
a
CTCT
c
c
c
c
(3.12)
Hence,
( )( )
( ) 0ˆ4
ˆ
22
0
22
0
,
,2
111
21
21
,
,1
=Θ⎟⎟⎠
⎞⎜⎜⎝
⎛
+−
=∂
Θ∂
=
=
=
=
=
=
αγω
ωτ
αγω
ωτ γαγ
γαγ c
ca
b
a
bCT
CT
(3.13)
The solution to Equation 3.13 yields

24
11 αγ = (3.14)
Since there is no information about signal phase in the magnitude representation
of the CT, the real part of the CT is used to estimate the phase of the echo, θ .
( )( ) ( ) ( )
( )
( ) ( )( )( ) ( )( ) ( )
( )
( ) ( )( ) ( )
( )
( )
( ) ( )( )
⎥⎥⎥⎥
⎦
⎤
−−++
−⎟⎠
⎞⎜⎝
⎛ ++
−−++
+−++
−−++
+−++
−++
−⎟⎠
⎞⎜⎝
⎛ −−
−+⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+−
Θ=Θ −
τγαγα
γαγαω
ω
τγαγα
ωααγγω
τγαγα
γααγγα
γαγα
γαω
ω
θϕγαγα
ba
ba
b
a
CTCT
c
c
c
222
211
22110
222
211
022
21
22
21
22
222
11
222
21
22
212
222
211
22
20
11
221
4
tan21cosˆˆRe
(3.15)
Based on the above estimation of a , b and 2γ , the estimation of phase, θ ,
becomes a one-dimensional estimation problem. The maximum of ( )( )Θ̂Re CT yields the
optimal solution for θ . This can be obtained by taking the partial derivative of
( )( )Θ̂Re CT with respect to θ and setting it to 0,
( )( ) ( ) ( )( ) 0ˆResinˆRe
22
0
22
0,,
,,=Θ−=
∂Θ∂
=
==
=
== αγω
ωτ
αγω
ωτ
φθθ c
ca
b
ab
CTCT
(3.16)
The solution of Equation 3.16 yields

25
πφθ k2±= , ,...3,2,1=k (3.17)
In summary, the mathematical steps present above show that the chirplet
transform leads to an exact estimation of the time-of-arrival, center frequency, phase,
bandwidth factor, and chirp-rate of the chirp echo signal. The parameter estimation based
on these equations can be implemented successively using signal correlation (see
Equation 3.2). A grid search is performed of these parameters are refined with a fast
Gauss-Newton algorithm [Dem00, Dem01a, Dem01b]. The refinement improves the
parameter estimation beyond the resolution of the search grid. The successive parameter
estimation based on CTSD method can recover the exact value of the parameters of a
noise-free Gaussian chirp echo. It does not require any initial guess for the parameters
before estimation. Furthermore, it can also estimate the parameters of a noise corrupted
echo with high accuracy.
3.3 Windowing Algorithm
We utilize the successive parameter estimation technique to decompose a
complex signal into a small number of Gaussian chirplets. The complex signal is
presented by the linear addition of a number of chirplets:
( )∑
−
=Θ=
1
0)(
N
jtfts
j
(3.18)
where ( )tfjΘ is the chirplet model and jΘ is the parameter vector of ( )tf
jΘ , (refer to
Equation 3.1).
26
The goal of signal decomposition is to express the signal, )(ts , as a linear
combination of chirp components. The decomposition is performed as follows. First,
based on the CT of the signal (i.e.,TF representation), the most dominant chirp echo is
windowed and estimated using the successive parameter estimation algorithm presented
in Section 3.2. Then, the estimated echo is subtracted from the original signal. Next, the
second echo is estimated from the remaining signal. This process is repeated until the
reconstruction error, Er, is below an acceptable value Emin. The value of Emin is
determined based on the requirements of the reconstruction quality of the signal. This
iterative decomposition method ensures energy preservation by coherently distributing
the signal energy into composing function. Energy preservation allows us to add the TF
distribution of composing function ( )tfjΘ to estimate the TF distribution of the
signal )( ts . Meanwhile, the sparseness of decomposition is ensured by searching for
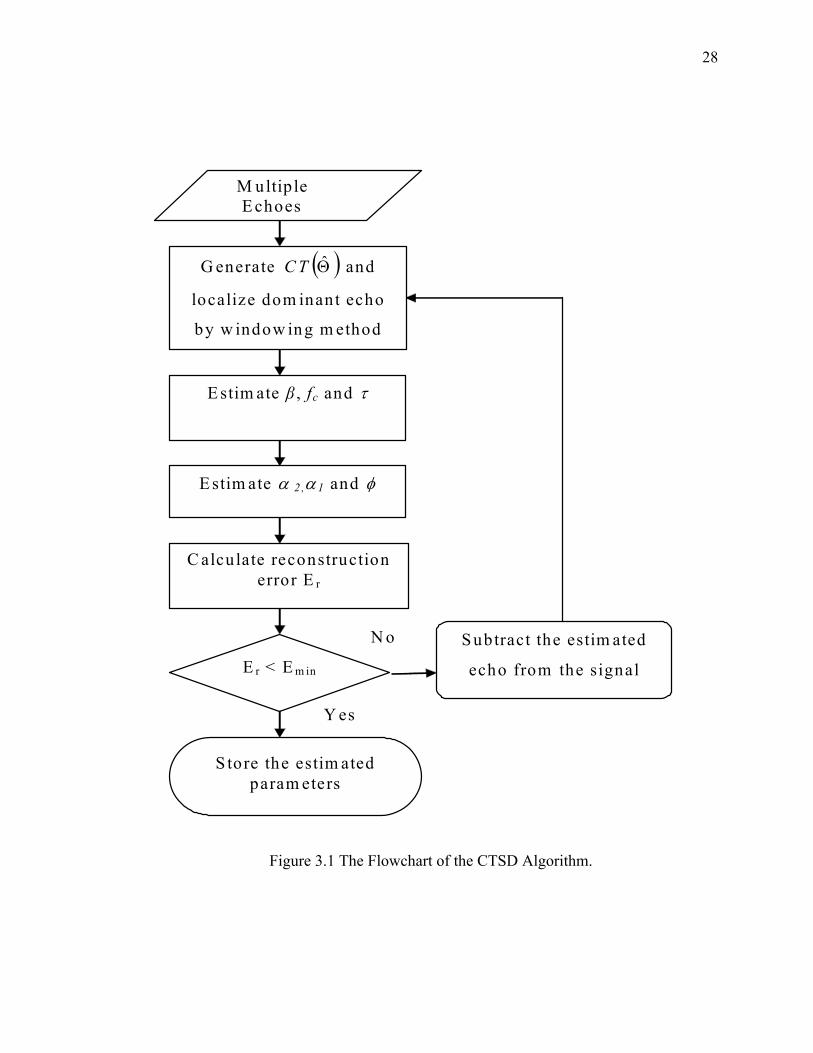
the most dominant chirp echo per iteration. A block diagram summarizing the chirplet
signal decomposition algorithm is shown in Figure 3.1.
The procedure used to design the window is based on the determination of the
peaks and valleys of the CT of the signal. Figure 3.2 illustrates the windowing method
with simulated data containing 3 interfering echoes. First, the maximum peak of the CT
of the signal (Figure. 3.2a) is identified. Next, the CT of the signal is projected onto the
time domain (Figure. 3.2c) and frequency domain (Figure. 3.2b). The windowing
algorithm uses these projections to isolate the dominant echo by tracing the nearest
valleys around the peak. The closest two valleys confining the time-projection peak are
defined as the boundaries of the time-window (i.e., Tbegin and Tend in Figure. 3.2c).
Similarly, the closest two valleys confining the frequency projection peak are defined as
27
the boundaries of the frequency-window (i.e., Fbegin and Fend in Figure 3.2b). The time-
of-arrival τ and center frequency cf parameters are in fact the peak locations of the
projections (see Equation 3.2). The dominant signal along with the time window and
frequency window is used to estimate the remaining chirplet parameters (i.e.,
amplitude β , bandwidth 1γ , chirp rate 2γ , and phaseθ ) using signal correlation (see
Equation 3.2).
When there are heavily overlapping echoes and high noise levels, the performance
of the automatic windowing method may be compromised as the peak separation process
becomes more difficult. The distance between peaks becomes shorter and artificial
valley points may be created due to the noise. In these cases, a time window and
frequency window with predetermined size can be used to separate out the time and
frequency projection peaks. The windows are centered at the peaks. The sizes of the
windows can be determined by inspecting the CT of the measured signal for given noise
levels. A good window size selection strategy is to keep as much of the signal energy as
possible while suppressing the contribution of noise energy in the window. For the
simulated and experimental signals presented in this study, the automatic windowing
method performed adequately in extracting the individual echoes. However, one can
apply the predetermined windowing method for signals with very poor SNRs (2 dB and
below).
28
E stim ate α 2 ,α 1 and φ
E r < E m in
Y es
N o Subtract the estim ated
echo from the signal
S tore the estim ated param eters
G enerate ( )Θ̂C T and
localize dom inant echo
by w indow ing m ethod
M ultip le E choes
C alculate reconstruction error E r
E stim ate β , fc and τ
Figure 3.1 The Flowchart of the CTSD Algorithm.

29
Figure 3.2 Basic illustration of dominant echo windowing method: a) CT of three interfering chirp echoes. The most dominant echo is emphasized after time and frequency windowing b) Projection in frequency domain and the frequency-window boundary points (dashed lines) c) Projection in time domain and the time-window boundary points (dashed lines)
30
3.4 Comparison with Gabor Decomposition Algorithm
The CTSD algorithm is very effective in representing dispersive ultrasonic
echoes. An alternative decomposition algorithm [Car05a] uses a Gabor kernel to analyze
ultrasonic echoes. However, if the ultrasonic signal has a dispersive or frequency shift
property, Gabor decomposition requires many components. The chirplet model is
expected to have better decomposition efficiency with extra parameter diversity. To
demonstrate chirplet decomposition efficiency, a noisy chirp signal containing highly
overlapping echoes is simulated, and then the algorithm presented in [Car05a] and the
CTSD algorithm are both applied to reconstruct the signal. Figure 3.3 shows the noisy
chirp signal and the two reconstruction results from these two different decomposition
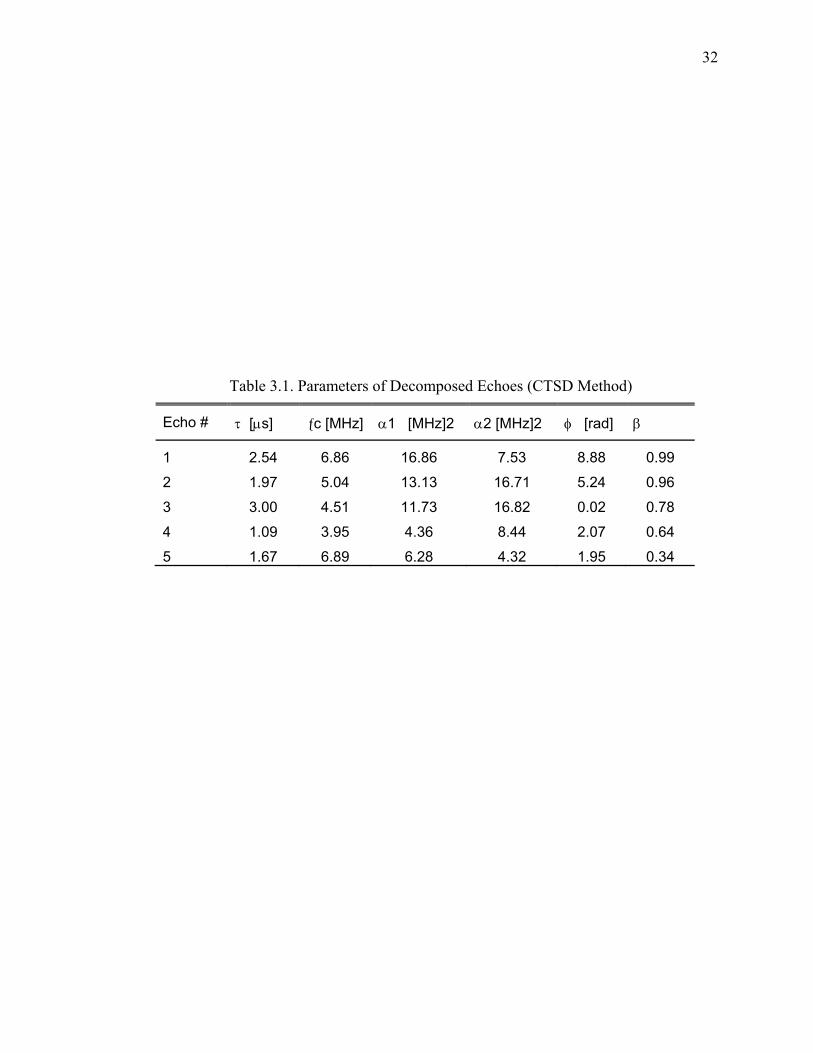
strategies, under the same output SNR criteria. More specifically, the parameters of the
decomposed echoes are listed in Table 3.1 and Table 3.2. Furthermore, Figure 3.4 shows
the time frequency difference of the reconstructed signal using CTSD method (see Figure
3.4c and Figure 3.4d) and using Gabor method (see Figure 3.4e and Figure 3.4f). It can
be seen that, under the same quality of reconstructed signal (i.e., the same output SNR
criteria), the chirplet decomposition algorithm requires significantly a less number of
components than Gabor decomposition [Lu06a].
The compact representation achieved by the chirplet decomposition is more
powerful in revealing the physical properties of chirp-type signals (e.g., the Doppler shift
in a radar system, the dispersive echoes in an ultrasonic nondestructive testing system).
31
3.5 Summary
In this chapter, we introduce a successive and efficient chirplet decomposition
algorithm that employs an adaptive chirplet kernel as the general model for the parameter
estimation of the superimposed chirp signal. This algorithm adaptively tracks and locates
the individual echoes for efficient and precise estimation of all echo parameters. Analysis
results showed that the performance of chirplet signal decomposition overwhelmed that
of the Gabor decomposition algorithm with less number of components to reconstruct the
same high overlapping signal. Hence, the chirplet signal decomposition and parameter
estimation algorithm allows for high fidelity signal reconstruction.
32
Table 3.1. Parameters of Decomposed Echoes (CTSD Method)
Echo # τ [μs] ƒc [MHz] α1 [MHz]2 α2 [MHz]2 φ [rad] β
1 2.54 6.86 16.86 7.53 8.88 0.99
2 1.97 5.04 13.13 16.71 5.24 0.96
3 3.00 4.51 11.73 16.82 0.02 0.78
4 1.09 3.95 4.36 8.44 2.07 0.64
5 1.67 6.89 6.28 4.32 1.95 0.34

33
Table3.2. Parameters of Decomposed Echoes (Gabor Decomposition Method)
Echo # τ [μs] ƒc [MHz] α1 [MHz]2 φ [rad] β
1 1.91 4.86 19.70 3.91 1.01
2 2.54 6.92 16.18 9.09 0.97
3 3.02 4.65 27.00 0.73 0.88
4 1.10 4.06 7.13 2.69 0.65
5 2.69 3.95 41.11 5.67 0.39
6 1.97 7.31 3.44 -2.57 0.34
7 3.31 5.73 65.66 4.47 0.27
8 1.58 3.66 36.10 -2.85 0.26
9 0.86 2.68 4.22 -3.10 0.23
10 1.82 5.87 1.84 6.63 0.18
11 2.72 8.82 10.08 -1.84 0.11

34
Figure 3.3 Simulated Ultrasonic Highly Overlapping Echoes (Solid Line), Superimposed with the Reconstructed Signals by CTSD Method and Gabor Decomposition Method.
35
Figure 3.4. Comparisons of CTSD Method and Gabor Decomposition Method. a) Simulated Highly Overlapping Echoes. b) WVD of the Original Simulated Signal. c) Reconstructed Signal by CTSD Method. d) WVD of the Reconstructed Signal (Using CTSD). e) Reconstructed Signal by Gabor Method. f) WVD of the Reconstructed Signal (Using Gabor).

36
CHAPTER 4
SIGNAL DECOMPOSITION BASED ON MATCHING PURSUIT
4.1 Introduction
The matching pursuit (MP) algorithm has been initially introduced by Mallat and
Zhang [Mal89, Mal93]. It aims to provide a signal analysis framework for non-stationary
signal under energy conservation signal decomposition condition. Hence, a high
resolution TF representation can be achieved by decomposing ultrasonic backscattering
signal into a limited number of elementary functions with known TF distribution such as
WVD.
The real challenge of matching pursuit algorithm is that different matching
criteria can get different decomposition results [Adl96, Che98, and Cot98]. The original
matching pursuit algorithm uses correlation criteria (the inner product between signal
residue and a pre-defined dictionary function) to determine the best matching function.
This matching criterion obtains decompositions adaptive to global signal characteristics,
but is not best adapted to its local structures.
Recently, an enhanced version of MP algorithm, called high resolution matching
pursuit (HRMP) algorithm, is proposed by Grilbonval et. al [Gri96]. The HRMP uses a
different correlation function, which allows the pursuit to emphasize local fit over global
fit at each step. The new correlation function avoids creating energy at time location
where there are none. Compared with MP algorithm, HRMP algorithm performs higher
time resolution decomposition but the frequency resolution is decreased [Gri96]. This
limits the use of HRMP algorithm in the case for ultrasonic signal where local signal
structure change in frequency.
37
In this chapter, we first introduce matching pursuing signal decomposition
algorithm based on Maximum Likelihood Estimation (MPSD-MLE). The principle of
MPSD-MLE algorithm is discussed. Moreover, another implementation scheme, which is
the matching pursuit signal decomposition based on Maximum a Posteriori (MPSD-
MAP), is presented. Furthermore, the performance of these two algorithms is
demonstrated by applying both algorithms to simulated overlapping signal.
4.2 MPSD-MLE Algorithm
In the implementation of the original MP algorithm, the best match criterion is
based on the projection coefficient obtained by projecting the signal residue of current
stage onto a dictionary function. The signal residue of next stage is the remaining signal
after the best matching function has been subtracted from the signal residue of current
stage. When the energy summation of signal residue at all stages is a fraction of the
energy of the original signal, the decomposition is said to be completed. The final
decomposition is a linear expansion of all chosen matching functions.
In our MP algorithm, by incorporating the statistical strategies such as Maximum
Likelihood Estimation (MLE) and Maximum a Posteriori (MAP) method, we adaptively
optimize the parameters of the chirplet function to achieve high resolution
decompositions. This approach avoids the exhaustive search of a larger number of
dictionary functions and leads to a more efficient implementation.
At any stage of the MP algorithm, the signal residue is represented by a chirplet
function and a remaining signal (i.e., next residue),

38
sRtgsR nn 1);( ++Θ= (4.1)
Here, sR n is the current residue of signal )(ts , sR n 1+ is the next signal residue and
);( Θtg is a chirplet echo defined by the model,
])()(2cos[);( 22
2)( 21 φτατπβ τα +−+−=Θ −− ttfetg c
t
(4.2)
Where ],,,,,[ 21 τφβαα cf=Θ denotes the parameter vector of );( Θtg .
If we assume sR n 1+ has white Gaussian noise characteristics, the maximum likelihood
estimation of the parameter vector Θ can be obtained by minimizing:
2);(minargˆ Θ−=Θ Θ tgsR n
MLE (4.3)
Therefore, the parameter vector of the best matching function at stage n is chosen
by minimizing the least-square error. By assuming the remaining signal residue sR n 1+
is white Gaussian, Maximum Likelihood Estimation is simplified to Least Square
estimation [Kay93, Dem01a]. Hence, the optimization problem in Equation 4.3 replaces
the search for the best matching function. The MLE parameter vector, MLEΘ̂ , maximizes
the inner product between signal residue and normalized chirplet function, );(, ΘtgsR n .
In summary, for the signal )(ts , the MPSD-MLE algorithm can be outlined in
the following computation steps:
1. Set iteration index 0=n and first signal residue )(0 tssR = .
2. Find the best parameter vector of the chirplet function such that
2
);(minargˆ Θ−=Θ Θ tgsRnn (4.4)

39
3. Computer the next residue )ˆ;(1n
nn tgsRsR Θ−=+.
4. Check convergence: If Thresholdts
sR n
≤+
2
21
)(, STOP;
OTHERWISE, set 1+→ nn , and go to Step 2.
Step 1 of the algorithm initializes current signal residue as the original signal.
Step 2 finds the best matching function for the current signal residue by optimizing the
parameters of the chirplet function. Step 3 computes the next signal residue by
subtracting the best matching chirplet function. Step 4 checks for convergence: if the
residue energy is some fraction of the original signal energy, the algorithm stops,
otherwise a new chirplet function is matched to current signal residue. The flow chart of
MPSD algorithm is shown in Figure 4.1.
In the decomposition algorithm, Step 2 is essentially the most important step. An
optimal solution is critical in achieving the best decomposition. Since the model );( Θtg
is a nonlinear function ofΘ , there is no closed form solution available for Equation 4.4.
An iterative estimator can be obtained by successive linearizing the objective function.
i.e., by taking Taylor series expansion of );( Θtg at ( )nΘ
))(();();( )()()( nnn Htgtg Θ−ΘΘ+Θ≈Θ (4.5)
Where )(
)()( )(
n
gH n
Θ=ΘΘ∂Θ∂
=Θ
Then Equation 4.5 can be expressed as
WHX n +ΘΘ= )(~ )( (4.6)
Where ( ) )()()( )(;~ nnnn HtgsRX ΘΘ+Θ−= , and sRW n 1+=
Lemma 1: Optimality of the MLE for the linear model [Kay98]
40
For linear model WHX +Θ= , where ),0(~ WCNW .Then the minimum variance
unbiased MVU estimator is XHHH TT 1][ˆ −=Θ . Therefore, assuming that sR n 1+ has
white Gaussian noise (WGN) characteristics in Equation 4.6, the MLE estimation of the
parameter vector Θ can be obtained by
)];()[()]()([ˆ )(1)()()( nnnTnnTnMLE tgsRHHH Θ−ΘΘΘ+Θ=Θ −
(4.7)
A fast Gauss-Newton algorithm is used to approach the MLE estimator MLEΘ̂ in
iterative manner. Consider the signal sR n and the chirp function );( Θtg [see Equation
4.2]
it can be outlined as the following steps.
1. Make an initial guess for the parameter vector )0(Θ and set iteration number
0=k .
2. Compute the gradients ( ) )( kH Θ of the chirplet function );( )( ktg Θ .
3. Update the parameter vector:
( ) ( )[ ] ( ) ( ) )];()[()()( 1)()1( knkTkkTkkMLE tgsRHHH Θ−ΘΘΘ+Θ=Θ
−+ (4.8)
4. Check convergence: If Thresholdkk ≤Θ−Θ + )()1( , then STOP;
OTHERWISE, set 1+→ kk , and go to Step 2.
The MPSD-MLE method described above yields a greedy approximation of the
signal. As long as a function matches the signal residue, it is included in the
decomposition. We demonstrate the performance of MPSD-MLE with a simulation
41
example. This example simulates two overlapping ultrasonic echoes sampled at 100 MHz
sampling frequency. The parameter vectors used to generate these functions are
[ ]0.10.0][0.4][0.80.40.5 221 radMHzMHzMHzsμ=Θ
[ ]0.10.1][0.3][0.60.65.5 222 radMHzMHzMHzsμ=Θ
These two echoes are very close in terms of center frequency and bandwidths.
Figure 4.2 shows the overlapping signal superimposed with the reconstructed result.
Figure 4.3a and Figure 4.3c display the original simulated signal and the reconstructed
signal using MPSD-MLE algorithm. It can be seen that the MPSD-MLE algorithm
successfully reconstructs the original signal. When the MPSD-MLE algorithm is applied
to this signal, the decomposition consists of 4 chirplets is obtained. The estimated
parameters are listed in the Table 4.1. Figure 4.2b shows the WVD representation of the
signal in Figure 4.3a. As a comparison, the WVD representation of estimated chirplets is
shown in Figure 4.3d.
From the estimation results of simulation example, it can be seen that in MPSD-
MLE algorithm, the decomposition is globally adaptive to signal structures. However, the
globally decomposition may smear out fine local structures in the signal.
42
Figure 4.1. The Flowchart of MPSD Algorithm.

43
Figure 4.2. Overlapping Chirp Signal Superposed with the Reconstructed Signal Using MPSD-MLE Algorithm.
44
Figure 4.3. a) Overlapping Chirp Signal. b) WVD of the Overlapping Chirp Signal. c) the Estimated Signal Using MPSD-MLE Algorithm. d) WVD of the Estimated Signal.

45
Table 4.1. Parameters of Decomposed Echoes for the Simulated Chirp Signal (MPSD- MLE algorithm)
Echo # τ [μs] ƒc [MHz] α2 [MHz]2 α2 [MHz]2 φ [rad] β
1 5.3813 4.9693 2.9764 11.6557 -2.8034 0.9233
2 5.0514 5.2377 3.5799 11.5799 -3.7480 0.6123
3 6.1383 7.8849 15.1833 -5.2435 -0.2044 0.1445
4 5.7791 5.4511 21.9219 4.1550 -0.3411 0.1097

46
4.3 MPSD-MAP Algorithm
One can improve the MPSD algorithm by concentrating on the local signal
structures and using better matching criteria. We propose a MPSD algorithm based on
the MAP estimation principle to achieve high-resolution decompositions. This algorithm
is an extension of the MPSD-MLE algorithm. Essentially, the MAP strategy replaces the
MLE strategy in Step 2: when choosing the chirplet function to match signal residues,
one can place constraints on the parameters of chirplet functions to achieve locally
adaptive functions. By enforcing a priori information on the parameters of chirplet
functions, MAP estimation provides a convenient and highly effective way to match local
signal characteristics. This estimation approach also uses the least square criterion but
only includes chirplet functions whose parameters are allowed to vary around a priori
values in the decomposition.
The MPSD-MAP algorithm can be formulated by changing Step 2 of the MPSD-
MLE algorithm as:
2);(minargˆ Θ−=Θ Θ tgsR n
n , where Θ=Θ μ)(E and Θ=ΘΘ CE T )( (4.9)
Based on the above optimization criterion, the MAP estimator can be derived as
following.
Lemma 2: Posterior probability density function (PDF) for the Bayesian General
Linear Model [Kay98 ]
For Bayesian general linear model WHX +Θ= , where ),0(~ WCNW and
),(~ ΘΘΘ CN μ .Then the posterior PDF )|( Xp Θ is Gaussian with mean
)()(]|[ 1Θ
−ΘΘΘ −++=Θ μμ HXCHHCHCXE W
TT and covariance

47
Θ−
ΘΘΘΘ +−= HCCHHCHCCC WTT
X1
| )( . Therefore, in Equation 4.6, assuming that
),0(~1W
n CNsR + and ),(~ ΘΘΘ CN μ
The MAP estimation of the parameter vector Θ can be obtained by
)])(();()[()]()([ˆ )()()()(1)()(1Θ
−−ΘΘ −ΘΘ+Θ−ΘΘΘ++=Θ CHtgsRHHHCC nnnnnTnnT
WMAP μ
(4.10)
It can be verified that if there is no prior knowledge of Θ (i.e.,
0=Θμ and ∞=ΘC ), the MAP estimator (see Equation 4.10) is same as the MLE
estimator (see Equation 4.7). Similarly, a fast Gauss-Newton algorithm is used to
approach the MAP estimator MAPΘ̂ in iterative manner. In the Step 3 of fast Gauss-
Newton algorithm, Equation 4.8 is substituted by Equation 4.11.
)])(();()[()]()([ )()()()(1)()(11Θ
−−ΘΘ
+ −ΘΘ+Θ−ΘΘΘ++=Θ CHtgsRHHHCC kkknkTkkTW
kMAP μ
(4.11)
To demonstrate the difference of MPSD-MLE and MPSD-MAP, we apply
MPSD-MAP algorithm to the same overlapping simulated chirp signal in the
demonstrated example of MPSD-MLE discussion. For MPSD-MAP decomposition, the
following prior statistics are used for the parameter vector
[ ]0.10.0][15][250.50.1][ 22 radMHzMHzMHzsE μ=Θ
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=Θ
0.10000000.1000000][15000000][2500000020000000.1
2
2
radMHz
MHzMHz
s
C
μ
(4.12)

48
These prior statistics favor chirplet functions with center frequencies around 5
MHz, bandwidth factor around 25 [MHz] 2, chirp rate around 15 [MHz] 2. The variations
in these values are determined by the variances, i.e., the diagonal elements in the
covariance matrix ΘC .
As a comparison of MPSD-MLE algorithm, the same ultrasonic signal is used to
demonstrate the MPSD-MAP algorithm. Figure 4.4 shows the overlapping signal
superimposed with the reconstructed result. Figure 4.5a and Figure 4.5c display the
original simulated signal and the reconstructed signal using MPSD-MAP algorithm. It
can be seen that the MPSD-MAP algorithm successfully reconstructs the original signal.
When the MPSD-MAP algorithm is applied to this signal, the decomposition consists of
3 chirplets is obtained. The estimated parameters are listed in the Table 4.2. Figure 4.5b
shows the WVD representation of the signal in Figure 4.5a. As a comparison, the WVD
representation of estimated chirplets is shown in Figure 4.5d.
From the above results, it can be seen that , unlike the MPSD-MLE
decomposition[see Figure 4.3 and Table 4.1], the MPSD-MAP composition clearly fit
two distinct signal components with slightly different frequency content and produce a
physically meaningful result[see Figure 4.5 and Table 4.2 ].

49
Figure 4.4. Overlapping Chirp Signal Superposed with the Reconstructed Signal Using MPSD-MAP Algorithm.

50
Figure 4.5. a) Overlapping Chirp Signal. b) WVD of the Overlapping Chirp Signal. c) the Estimated Signal of MPSD-MAP. d) WVD of the Estimated Signal.

51
Table 4.2. Parameters of Decomposed Echoes for the Simulated Chirp Signal (MPSD- MAP algorithm)
Echo # τ [μs] ƒc [MHz] α1 [MHz]2 α2 [MHz]2 φ [rad] β
1 5.6575 5.9460 11.3153 9.0070 6.6903 0.8450
2 4.9685 3.8394 6.6208 0.3370 -0.6864 0.8548
3 5.3656 6.3116 5.0307 5.4906 -4.0350 0.467

52
To make the MPSD-MAP algorithm adaptive to the local characteristic of the
signal to be decomposed, we use a coarse initialization strategy to get prior knowledge of
the chirplet parameters. Consider the signal model );( Θtg (see Equation 4.2). The
following steps are used to estimate the initial values of these parameters:
1. Estimate iniτ and iniβ
maxtini =τ , here maxt is the location of );(max Θtg and iniβ is the
maximum value of );( Θtg .
2. Estimate ini1α
Using the normalized analytical signal ])()(2[)( 22
221);(ˆ φτατπτα +−+−−−=Θ ttft ceetg , Set test
points n , offsetsf
1=Δ , and nni ,...1,1,...,−−= , hence, the following
relationship holds
))(ˆlog()( max12 Δ±=Δ itgi α (4.13)
3. Estimate ini2α , inicf , and iniφ .
The phase of );(ˆ Θtg is φτατπ +−+− 22
2 )()(2 ttfc . Set test points n ,
offsetsf
1=Δ , and nni ,...1,1,...,−−= , hence, the following relationship holds
[ ] ))(ˆ(21)( max
22 Δ±=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ΔΔ itgphasefii c
φπα
(4.14)

53
In Equation 4.13 and Equation 4.14, the initial parameters ini1α , ini2α , inicf ,
and iniφ can be estimated through the n2 test equations, using the least square solution. In
a matrix form, the least square solution of equation BAX = is BAAAX '1' )( −= . It
is also noticed that the initial guess in severe noise levels affects the iteration efficiency
of MPSD algorithm.
4.4 Summary
In this chapter, the matching pursuit signal decomposition algorithm was
presented. By incorporating the MLE and MAP estimation strategies into the original
matching pursuit framework, the experimental and analytical results have shown that
both algorithms can be successfully used to decompose the signal into a linear
combination of chirplets and estimate the parameters of each chirplet. The different
decomposition results verified the difference of the algorithms in the nature of
implementation.
54
CHAPTER 5
COMPARITIVE STUDY OF CTSD AND MPSD ALGORITHMS
5.1 Introduction
CTSD and MPSD algorithms both are used to decompose ultrasonic backscattered
signal into a linear expansion of chirplet echoes and estimate the chirplet parameters. In
order to evaluate their performance of estimation in the presence of noise, we consider a
single chirp echo in white Gaussian noise with varying noise levels and observe the bias
and variation in the parameter estimation. Specifically, we use the following observed
chirp model
)();();( tntstr +Θ=Θ (5.1)
Where );( Θts represents the chirp echo and )( tn represents the zero-mean white
Gaussian noise with variance 2σ . The CRLB for the parameter vector Θ can be
analytically computing using
( ) ( )[ ]Θ≥Θ − 1ˆ IVar (5.2)
Where )(ΘI is the Fisher Information Matrix (FIM). For the above observed signal
model );( Θtr is normally distributed as )),;(( 2ItsN σΘ , hence the FIM can be written
as Kay98]
( ) ( ) ( )2σ
ΘΘ=Θ
HHIT
where )(ΘH represents the gradients of the chirp echo model. The analytical derivation
of the gradients, FIM and the CRLB are given as following.

55
5.2 Derivation of Cramer-Rao Lower Bounds
The Gaussian chirplet echo is defined by the following model
( ) ( ) ( ) ⎥⎦⎤
⎢⎣⎡ +−+−
−−=Θ
⎟⎠⎞⎜
⎝⎛
φτπτατα
β tcftt
ets 222cos
21; (5.3)
Where [ ]βφαατ 21cf=Θ denotes the parameter vector. To simplify analytical
derivations, the following kernel functions are used.
( ) ( ) ( )[ ]φτπτατα +−+−=Θ −− tfteth ct 2cos);( 2
2
21
( ) ( ) ( )[ ]φτπτατα +−+−=Θ −− tftetm ct 2sin);( 2
2
21 (5.4)
The partial derivatives of the chirplet with respect to each parameter in Θ can be
written in terms of the kernel functions:
( ) ( ) ( ) ( ) ( )[ ]ταπβτβατ
−+Θ+Θ−=∂Θ∂ tftmthtts
c 21 22;;2;
( ) ( ) ( )Θ−−=∂
Θ∂ ;2; tmtfts
c
τπβ
( ) ( ) ( )Θ−−=∂
Θ∂ ;; 2
1
thtts τβα
( ) ( ) ( )Θ−−=∂
Θ∂ ;; 2
2
tmtts τβα
( ) ( )Θ−=∂
Θ∂ ;; tmts βφ
( ) ( )Θ=∂
Θ∂ ;; thtsβ
(5.5)
So,
⎥⎦
⎤⎢⎣
⎡∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=Θβφτααssssss)(
21 cfH

56
[ ] ( ) ( )∫∞
∞− Θ∂Θ∂
⋅Θ∂Θ∂
≅⎥⎥⎦
⎤
⎢⎢⎣
⎡
Θ∂∂
⎥⎦
⎤⎢⎣
⎡Θ∂∂
=ΘΘ dttstsfHHji
sj
T
iij
T ;;ss)()(
Here, s denotes sampled value of );s( Θt under sampling frequency sf .
Let ( ) ( )∫∞
∞− Θ∂Θ∂
⋅Θ∂Θ∂
= dttstsAji
ij;; , ( ) dttmthtF kji
ijk ∫∞
∞−
ΘΘ−= );();(τ and
21
123
21
2 α
π=E , the computation of ( ) ( )ΘΘ HH T can be reduced to the computation of the
following expressions.
4202
11 FA β=
4112
12 FA β=
3112
22112
3202
113 222 FFfFA c βαβπβα −−−=
3112
14 2 FA πβ=
2112
15 FA β=
22016 FA β−=
4022
22 FA β=
3022
22022
3112
123 222 FFfFA c βαβπβα −−−=
3022
24 2 FA πβ=
2022
25 FA β=
21126 FA β−=

57
2112
211112
12022
2
1022
202022
2202
133
88)2(
4)2()2(
FFfF
FfFfFA
c
cc
βααβαπβα
βαπβπβα
+++
++=
2022
210222
2112
134 444 FFfFA c βπαβπβπα −−−=
1022
20022
1112
135 222 FFfFA c βαβπβα −−−=
1112011120136 222 FFfFA c βαβπβα ++=
( ) 2022
44 2 FA πβ=
1022
45 2 FA πβ=
11146 2 FA πβ−=
0022
55 FA β=
01156 FA β−=
02066 FA = (5.6)
All ijkF ( 40 ≤≤ i , 20 ≤≤ j , 20 ≤≤ k ) can be computed in Fourier domain. Hence, the
following results for ijkF can be obtained:
0302320102120 ==== FFFF
0411311211111 ==== FFFF
EFF == 002020
EFF111
202220 41
281
ααπ
α===
EFF 211
21
402420 163
2323
ααπ
α===
Using all of the above expressions, the FIM can be computed as
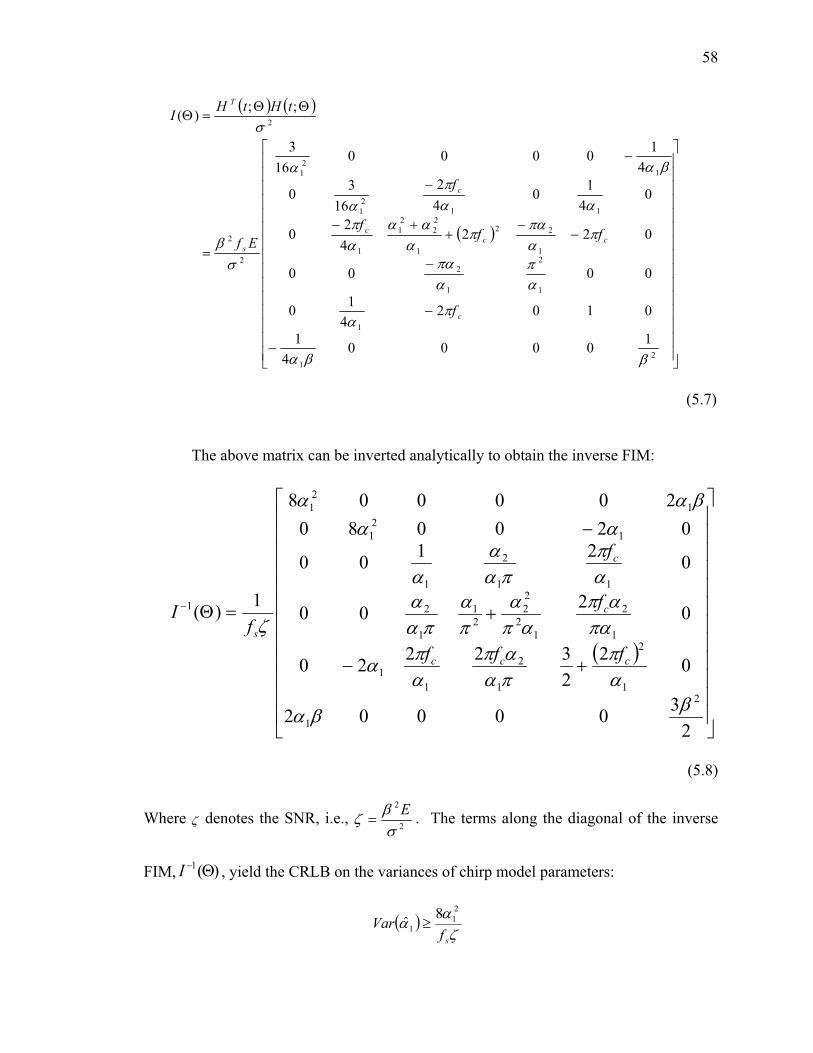
58
( ) ( )
( )
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
−−
++−
−
−
=
ΘΘ=Θ
21
1
1
2
1
2
1
22
1
22
21
1
112
1
12
1
2
2
2
100004
1
01024
10
0000
02242
0
04
1042
1630
410000
163
;;)(
ββα
πα
απ
απα
παπα
πααα
απ
ααπ
α
βαα
σβ
σ
c
ccc
c
s
T
f
fff
f
Ef
tHtHI
(5.7)
The above matrix can be inverted analytically to obtain the inverse FIM:
( )
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+−
+
−
=Θ−
2300002
02232220
0200
02100
020080200008
1)(
2
1
1
2
1
2
11
1
2
12
22
21
1
2
11
2
1
12
1
12
1
1
ββα
απ
πααπ
απα
πααπ
απα
πα
παα
απ
παα
α
ααβαα
ζ
ccc
c
c
s
fff
f
f
fI
(5.8)
Where ζ denotes the SNR, i.e., 2
2
σβζ E
= . The terms along the diagonal of the inverse
FIM, )(1 Θ−I , yield the CRLB on the variances of chirp model parameters:
( )ζα
αsf
Var21
18ˆ ≥
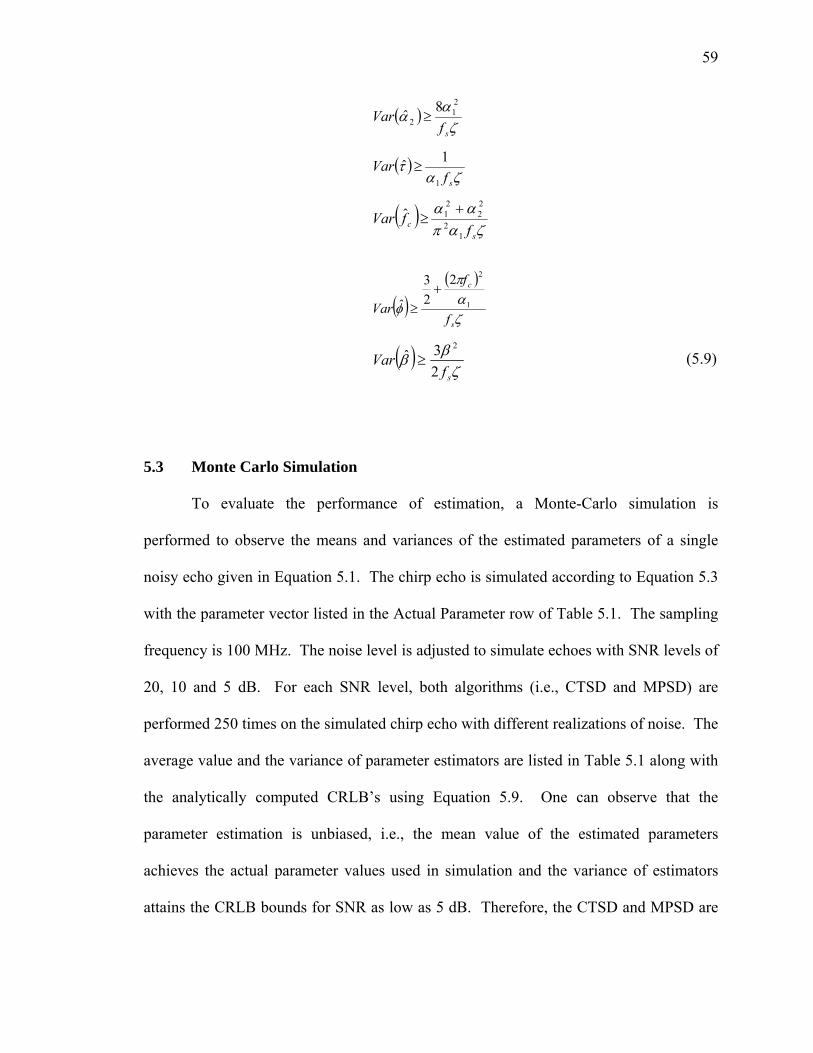
59
( )ζα
αsf
Var21
28ˆ ≥
( )ζα
τsf
Var1
1ˆ ≥
( )ζαπ
αα
sc f
fVar1
2
22
21ˆ +
≥
( )( )
ζαπ
φs
c
f
f
Var 1
2223
ˆ+
≥
( )ζ
ββsf
Var23ˆ
2
≥ (5.9)
5.3 Monte Carlo Simulation
To evaluate the performance of estimation, a Monte-Carlo simulation is
performed to observe the means and variances of the estimated parameters of a single
noisy echo given in Equation 5.1. The chirp echo is simulated according to Equation 5.3
with the parameter vector listed in the Actual Parameter row of Table 5.1. The sampling
frequency is 100 MHz. The noise level is adjusted to simulate echoes with SNR levels of
20, 10 and 5 dB. For each SNR level, both algorithms (i.e., CTSD and MPSD) are
performed 250 times on the simulated chirp echo with different realizations of noise. The
average value and the variance of parameter estimators are listed in Table 5.1 along with
the analytically computed CRLB’s using Equation 5.9. One can observe that the
parameter estimation is unbiased, i.e., the mean value of the estimated parameters
achieves the actual parameter values used in simulation and the variance of estimators
attains the CRLB bounds for SNR as low as 5 dB. Therefore, the CTSD and MPSD are

60
minimum variance unbiased (MVU) estimator for a single chirp echo, hence they provide
optimal parameter estimation results.
The signal decomposition and parameter estimation algorithms significantly
improve the SNR of chirp signals. To quantify the SNR improvement, a chirp echo with
varying noise level is simulated. After estimation is performed, the output SNR (i.e., an
estimated SNR) is computed as the energy ratio of the original signal and residual error,
i.e., the difference between the original and the estimated signal. Figure 5.1 shows the
output SNR as a function of the input SNR. Each point in this plot represents a
realization of the signal with a different noise level. The parameters of the single echo
have not been changed. The input SNR has been varied from 5 dB (severely poor SNR)
to 25 dB (high SNR). It has been observed that the average SNR enhancement for the
single echo in WGN is well above 20 dB. It is important to point out that one should
expect a smaller SNR enhancement when the signal contains overlapping chirp echoes
and is corrupted correlated noise.
5.4 Observation and Analysis
In Figure 5.1a and Figure 5.1b, it can be seen that in moderate noise levels (i.e.,
input SNR varying from 10 dB to 25 dB), the estimation efficiency of MPSD algorithm is
similar, even better than that of CTSD algorithm. However, in the severe noise levels
(i.e., input SNR is below 5 dB), the MPSD algorithm is not as efficient as the CTSD
algorithm. This can be explained by the different implementation strategies of CTSD
algorithm and MPSD algorithm. First, the CTSD algorithm performs parameter
estimation in time-frequency domain whereas the MPSD algorithm performs only in time

61
domain. Hence, the noise is better suppressed in CTSD algorithm than it is in MPSD
algorithm. Secondly, the MPSD algorithm is based on iterative optimization and may
become more dependent on the initial guess in severe noise levels.
5.5 Summary
In this comparative study of chirplet model-based echo estimation techniques, two
different signal decomposition and parameter estimation algorithms (i.e., CTSD and
MPSD) are analyzed. Numerical and analytical results have shown that both algorithms
attain CRLB bounds, therefore they are robust and efficient in signal analysis.
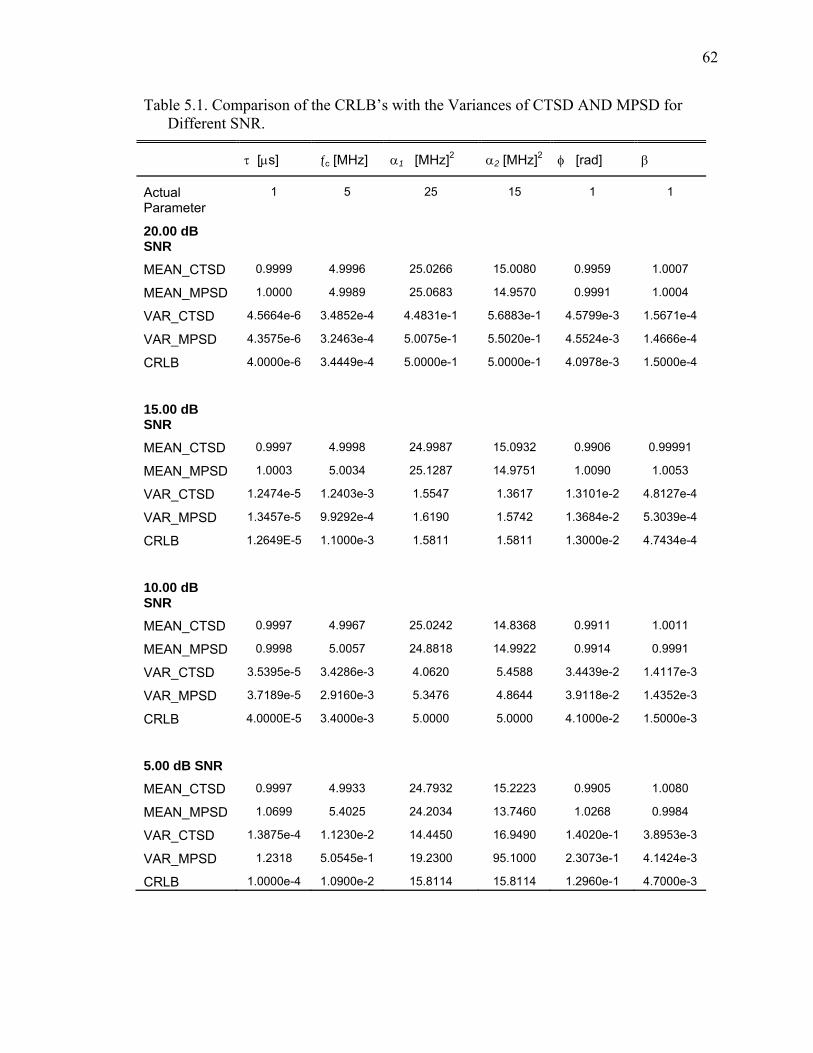
62
Table 5.1. Comparison of the CRLB’s with the Variances of CTSD AND MPSD for Different SNR.
τ [μs] ƒc [MHz] α1 [MHz]2 α2 [MHz]2 φ [rad] β
Actual Parameter
1 5 25 15 1 1
20.00 dB SNR
MEAN_CTSD 0.9999 4.9996 25.0266 15.0080 0.9959 1.0007
MEAN_MPSD 1.0000 4.9989 25.0683 14.9570 0.9991 1.0004
VAR_CTSD 4.5664e-6 3.4852e-4 4.4831e-1 5.6883e-1 4.5799e-3 1.5671e-4
VAR_MPSD 4.3575e-6 3.2463e-4 5.0075e-1 5.5020e-1 4.5524e-3 1.4666e-4
CRLB 4.0000e-6 3.4449e-4 5.0000e-1 5.0000e-1 4.0978e-3 1.5000e-4
15.00 dB SNR
MEAN_CTSD 0.9997 4.9998 24.9987 15.0932 0.9906 0.99991
MEAN_MPSD 1.0003 5.0034 25.1287 14.9751 1.0090 1.0053
VAR_CTSD 1.2474e-5 1.2403e-3 1.5547 1.3617 1.3101e-2 4.8127e-4
VAR_MPSD 1.3457e-5 9.9292e-4 1.6190 1.5742 1.3684e-2 5.3039e-4
CRLB 1.2649E-5 1.1000e-3 1.5811 1.5811 1.3000e-2 4.7434e-4
10.00 dB SNR
MEAN_CTSD 0.9997 4.9967 25.0242 14.8368 0.9911 1.0011
MEAN_MPSD 0.9998 5.0057 24.8818 14.9922 0.9914 0.9991
VAR_CTSD 3.5395e-5 3.4286e-3 4.0620 5.4588 3.4439e-2 1.4117e-3
VAR_MPSD 3.7189e-5 2.9160e-3 5.3476 4.8644 3.9118e-2 1.4352e-3
CRLB 4.0000E-5 3.4000e-3 5.0000 5.0000 4.1000e-2 1.5000e-3
5.00 dB SNR
MEAN_CTSD 0.9997 4.9933 24.7932 15.2223 0.9905 1.0080
MEAN_MPSD 1.0699 5.4025 24.2034 13.7460 1.0268 0.9984
VAR_CTSD 1.3875e-4 1.1230e-2 14.4450 16.9490 1.4020e-1 3.8953e-3
VAR_MPSD 1.2318 5.0545e-1 19.2300 95.1000 2.3073e-1 4.1424e-3
CRLB 1.0000e-4 1.0900e-2 15.8114 15.8114 1.2960e-1 4.7000e-3

63
Figure 5.1. a) Input SNR vs. Output SNR for a Single Noisy Chirp Echo Using CTSD Algorithm. b) Input SNR vs. Output SNR for a Single Noisy Chirp Echo Using MPSD Algorithm.

64
CHAPTER 6
TARGET DETECTION OF ULTRASONIC BACKSCATTERED SIGNAL
6.1 Introduction
In this chapter, the CTSD and MPSD algorithms are applied to estimate a target
embedded in a ultrasonic experimental backscattered signal which is acquired from a
ultrasonic nondestructive testing system. First, a real time ultrasonic pulse-echo
measurement system, which is used to acquire the ultrasonic backscattered data for signal
analysis, is reviewed. Then the CTSD and MPSD algorithms are used to process the
ultrasonic experimental data. Moreover, we evaluate the proposed algorithms by using an
experimental bat chirp signal, which is a benchmark signal from literatures for time
frequency signal analysis.
6.2 Read Time Ultrasonic Measurement System
The ultrasonic pulse echo method has been one of efficient non destructive
evaluation methods in the past decades. In general, a ultrasonic pulse echo system
requires one ultrasonic transducer (a device, usually refers to piezoelectric transducer,
that can convert electrical energy to acoustic pressure and generate electrical voltage
when a proper amount of acoustic pressure is forced on it) as the measuring probe, an
electrical pulse generation unit (transmitter) for transducer excitation and a display unit
for inspection of the received echoes. The principle of ultrasonic pulse echo method is to
launch acoustic waves into a medium and inspect the returning echoes. The incident
acoustic waves propagate through the medium and partially reflect from the impedance-

65
mismatched boundaries. The reflected acoustic waves excite the piezoelectric transducer
and form the returning ultrasonic signal.
The objective of ultrasonic pulse echo test is to evaluate the functionality and
characterization of specimen, which could be material, vegetation, or tissue texture.
Although there are a lot of information embedded in the return ultrasonic echoes, one of
the most common applications is ultrasonic target detection, which usually only addresses
the detection and positioning of defects in materials. The proposed signal decomposition
algorithms are used not only to detect and locate the targets but also enable us to
determine the characteristics of sound propagation and reflection as well as quantitatively
evaluate physical properties of targets.
The ultrasonic pulse-echo system used in this study for data acquisition is a real
time ultrasonic measurement system, which is depicted in Figure 6.1. It can be seen that
the basic elements of the system are transducer, stepper motor and controller, pulse
transmitter/receiver unit, oscilloscope with digitizer unit. The pulse transmitter/receiver
unit launches an impulse train to excite the transducer and generates a triggering signal to
control the timing of events in the system. A computer with virtual instrument
programming (i.e., LabVIEW programming) is used to control two stepper motors to
moving in both X and Y directions, and configure the sampling and digitizing parameters
for data acquisition. Due to the difficulties to reproduce the same conditions of coupling
between transducer and the specimen in transducer-contact method, we use water as
couplant in this experiment and immerse the specimen and transducer in a water tank.
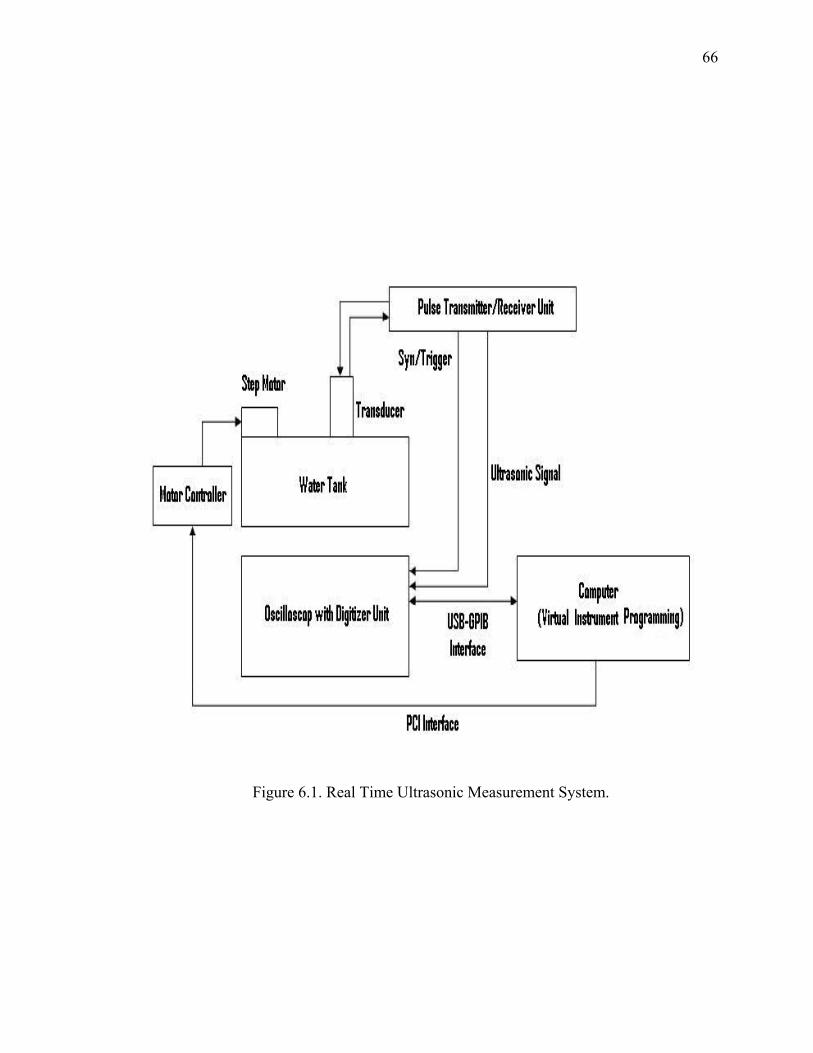
66
Figure 6.1. Real Time Ultrasonic Measurement System.
67
According to the transducer scan mode, there exist different testing procedures
(i.e., A-scan, B-scan and C-scan). When the transmitted signal scans the specimen along
the transducer axis through one fixed point, the acquired data is called A-scan (Amplitude
scan). When the transducer is moved along X or Y direction, it yields 2-D image, which
is called B-scan (Brightness scan). When the transducer is moved both in X and Y
directions, it would yields 3-D image. The image slice perpendicular to the transducer
axis is called C-scan (Constant depth scan). It can be seen that the A-scan is the base of
B-scan and C-scan. The quality of B-scan and C-scan in turn depend on the quality of A-
scan data in certain extent. The accurate analysis and enhancement of A-scan can
improve B-scan and C-scan for ultrasonic imaging and further process. The signal
decomposition algorithms aim to efficiently analysis an A-scan data.
6.3 Target Detection in Ultrasonic Backscattered Signal
The CTSD algorithm is utilized to evaluate an ultrasonic experimental
backscattered signal consisting of many interfering echoes and detect a embedded target.
The experimental signal is acquired from a steel block with a flat-bottom hole (i.e., target)
using a nominal center frequency 5MHz transducer and sampling rate of 100 MHz.
Figure 6.2 shows the reconstructed signal using CTSD algorithm (dash line)
superimposed the experimental ultrasonic backscattered echoes (solid line). The
experimental signal has poor SNR and the target echo shows interference from
microstructure scattering and measurement noise. The reconstructed signal and its
chirplet transform representation are shown in Figure 6.3c and Figure 6.3d. The
parameters of each decomposed chirplet using CTSD algorithm are listed in the Table 6.1.

68
Furthermore, the comparison between the experimental signal and the reconstructed
signal using CTSD algorithm (see Figure 6.2 and Figure 6.3) clearly demonstrates that
the chirplet signal decomposition has been successful in estimating echoes and filtering
out the noise.
Similarly, the MPSD algorithm is evaluated using the same ultrasonic
experimental backscattered signal consisting of many interfering echoes to detect the
embedded target. Figure 6.4 shows the reconstructed signal (dash line) using MPSD
algorithm superimposed the experimental ultrasonic backscattered echoes (solid line).
The experimental signal has poor SNR and the target echo shows interference from
microstructure scattering and measurement noise. The WVD representation of the
experimental signal (see Figure 6.5b) clearly shows that the experimental signal has poor
SNR and the target echo is completely embedded in the interference from microstructure
scattering, measurement noise. The cross-term effect of WVD also smears the target
information in the time frequency representation. After the process of decomposition, the
reconstructed signal and its WVD representation are shown in Figure 6.5c and Figure
6.5d. The parameters of each decomposed chirplet using MPSD algorithm are listed in
the Table 6.2. The comparison between the experimental signal and the reconstructed
signal using MPSD algorithm (see Figure 6.4 and Figure 6.5) also clearly demonstrates
that the decomposition has been successful in detecting the target echo and filtering out
the noise.
From the discussion of ultrasonic target detection, it can be seen that the CTSD
and MPSD algorithm can decompose and reconstruct the heavily overlapped ultrasonic
backscattered signal with high accuracy. The time frequency representations show that
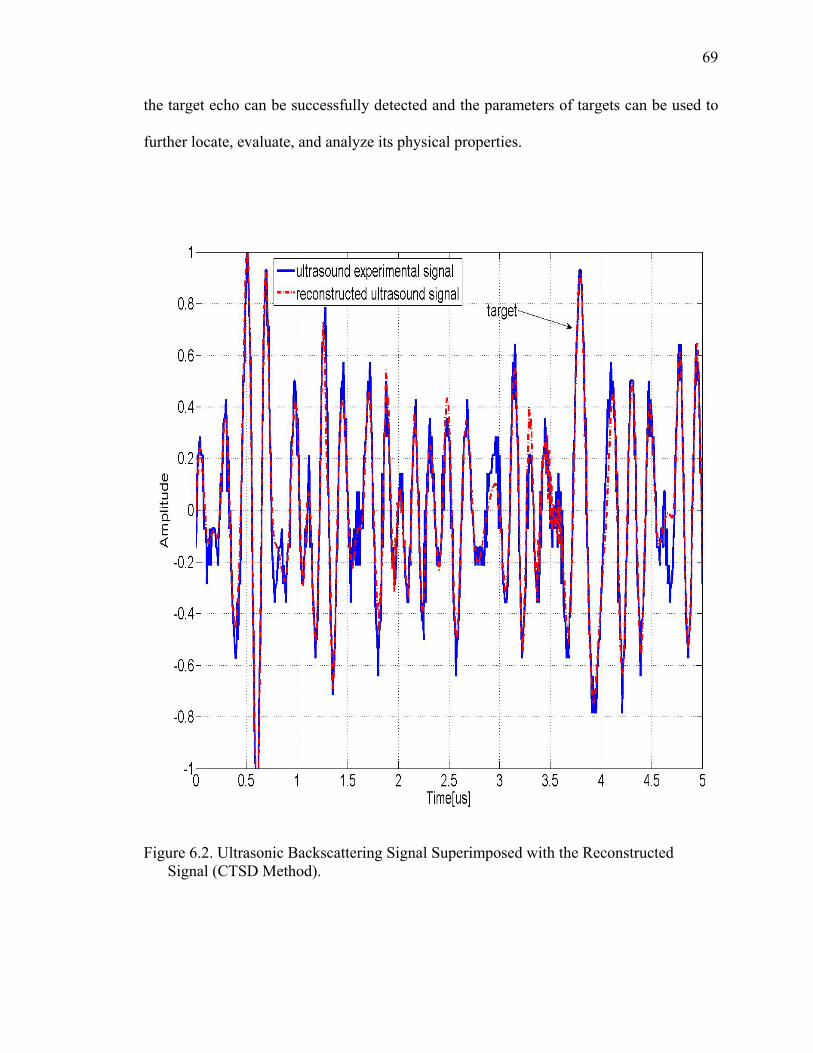
69
the target echo can be successfully detected and the parameters of targets can be used to
further locate, evaluate, and analyze its physical properties.
Figure 6.2. Ultrasonic Backscattering Signal Superimposed with the Reconstructed Signal (CTSD Method).
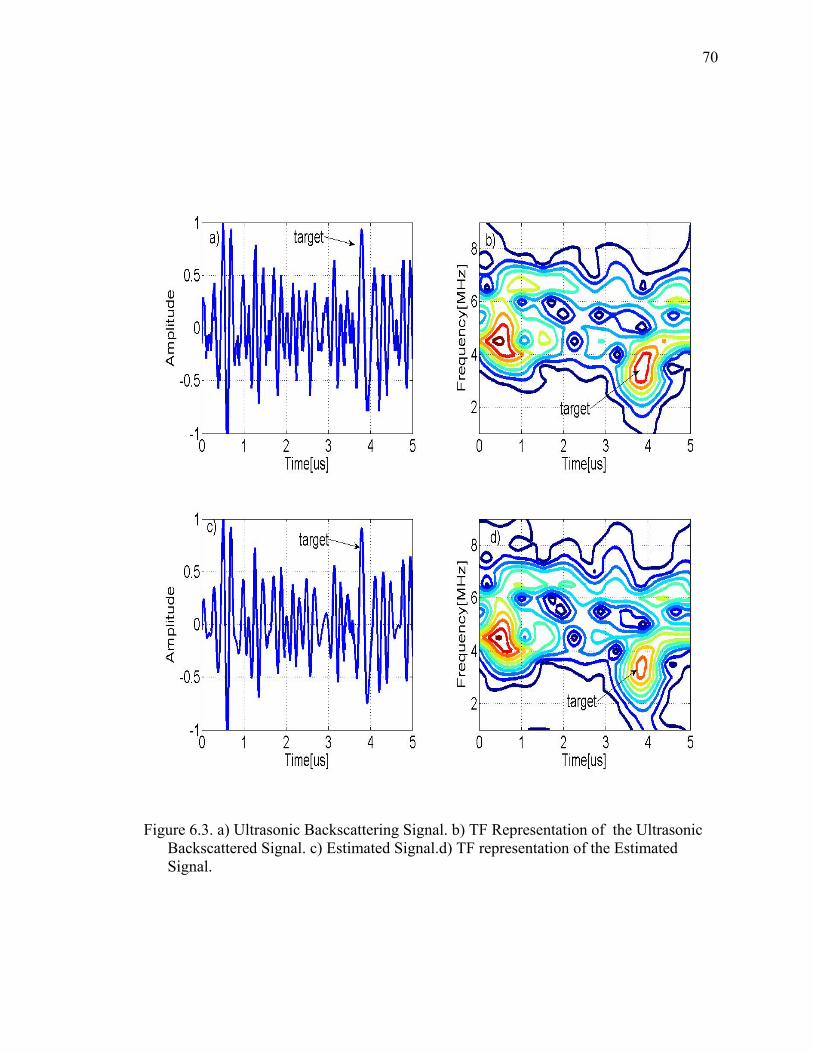
70
Figure 6.3. a) Ultrasonic Backscattering Signal. b) TF Representation of the Ultrasonic Backscattered Signal. c) Estimated Signal.d) TF representation of the Estimated Signal.

71
Table 6.1 Parameter Estimation Results for Ultrasonic signal (CTSD)
Echo # τ [μs] ƒc [MHz] α1 [MHz]2 α2 [MHz]2 φ [rad] β
1 0.5308 4.7014 43.0777 3.4705 0.8524 0.9276
2 1.2283 4.8446 308.7686 427.96 4.7114 0.8536
3 3.8402 3.3447 31.253 -22.8812 1.1696 0.8437
4 0.6605 3.7696 222.0866 90.9201 5.0828 0.6972
5 4.9418 5.6884 62.9997 8.5722 6.0407 0.5471
6 4.7969 4.0229 324.299 -85.4654 0.9936 0.5387
7 4.179 4.5125 93.1408 -15.737 2.1609 0.5046
8 4.3933 5.2119 48.4645 -3.5827 3.1171 0.4987
9 3.1771 5.8968 38.5415 27.8241 1.1234 0.487
10 1.3715 4.8725 155.1614 -172.874 4.0749 0.4794
11 1.8503 5.7028 70.8195 49.3017 4.8279 0.4581
12 2.527 5.2801 43.2308 -22.0839 1.6656 0.3998
13 -0.3449 10.6442 3.6708 -39.8702 5.033 0.3621
14 2.1343 6.5791 137.6486 114.295 4.883 0.3415
15 0.9926 5.9012 24.035 69.3318 0.4228 0.3295
16 1.5421 4.403 16.1625 -34.1705 2.7274 0.2961
17 3.4903 3.7745 33.1804 -51.7901 0.9032 0.1901
18 2.7452 3.9808 34.1805 -43.3182 2.0305 0.1656
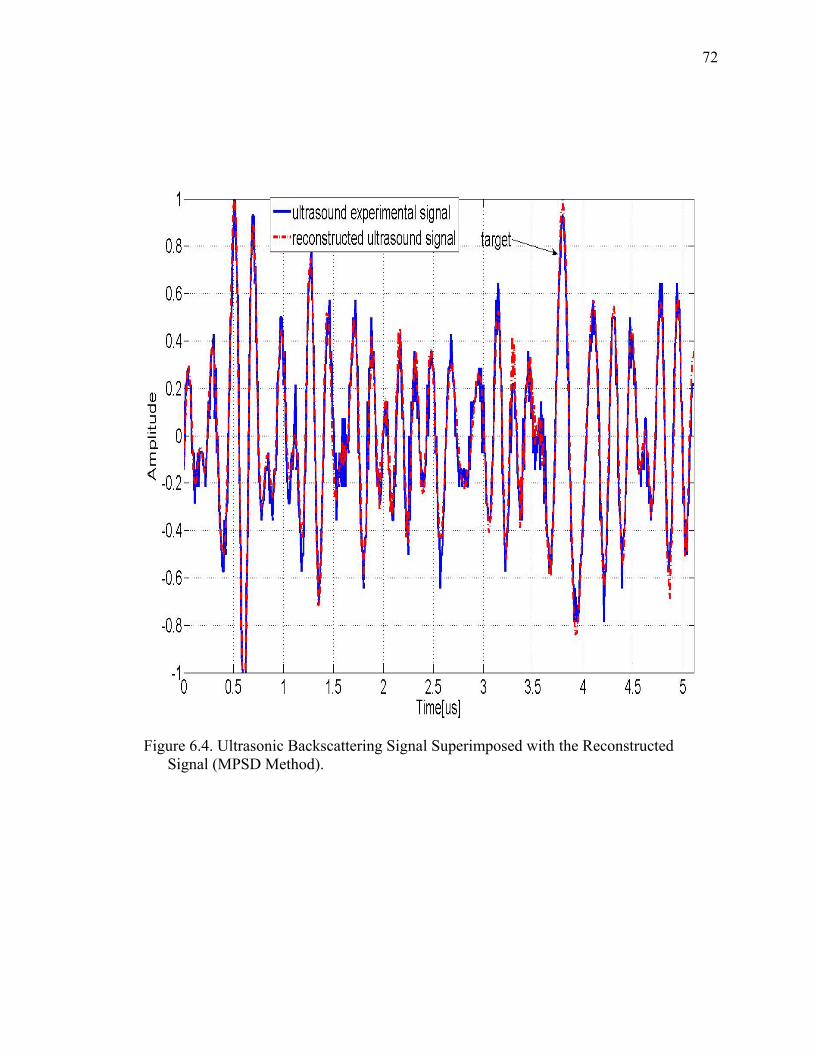
72
Figure 6.4. Ultrasonic Backscattering Signal Superimposed with the Reconstructed Signal (MPSD Method).
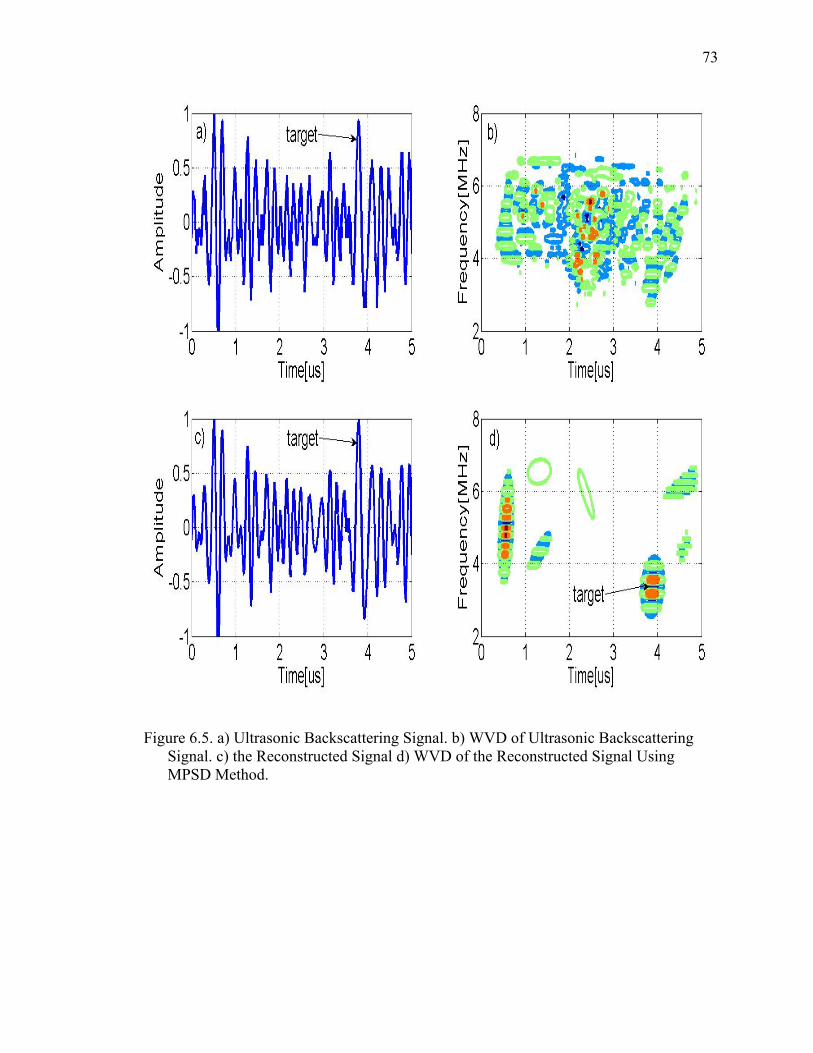
73
Figure 6.5. a) Ultrasonic Backscattering Signal. b) WVD of Ultrasonic Backscattering Signal. c) the Reconstructed Signal d) WVD of the Reconstructed Signal Using MPSD Method.
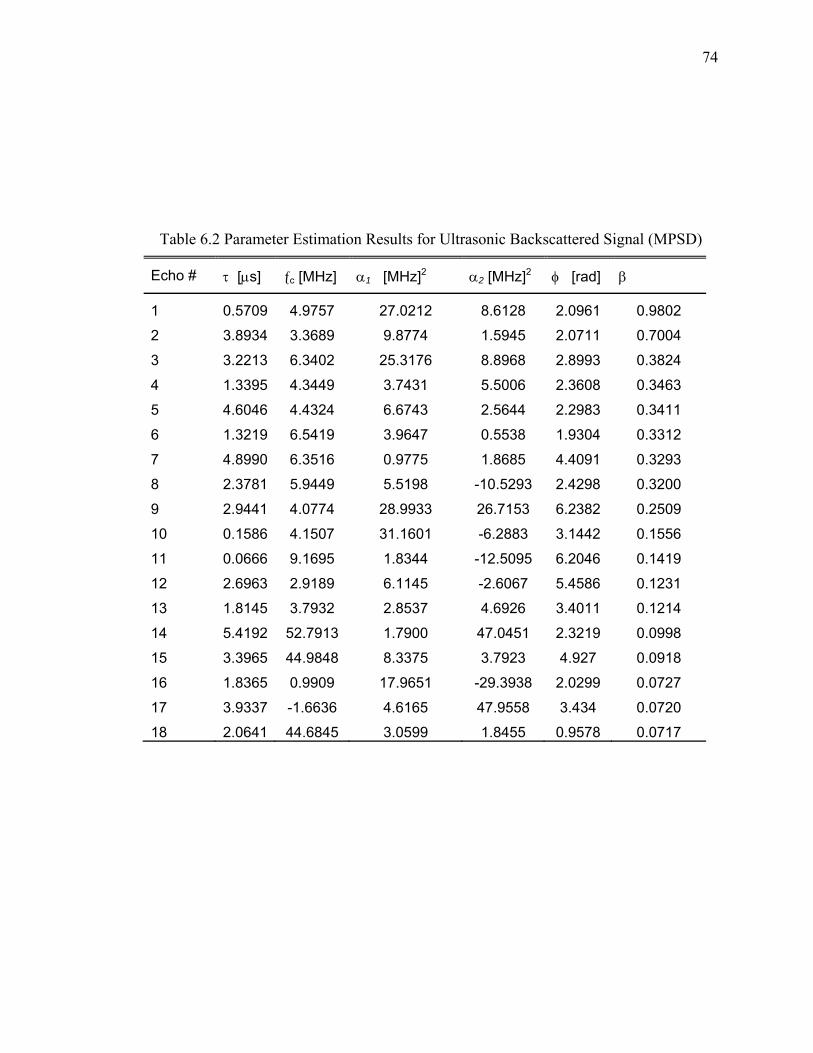
74
Table 6.2 Parameter Estimation Results for Ultrasonic Backscattered Signal (MPSD)
Echo # τ [μs] ƒc [MHz] α1 [MHz]2 α2 [MHz]2 φ [rad] β
1 0.5709 4.9757 27.0212 8.6128 2.0961 0.9802
2 3.8934 3.3689 9.8774 1.5945 2.0711 0.7004
3 3.2213 6.3402 25.3176 8.8968 2.8993 0.3824
4 1.3395 4.3449 3.7431 5.5006 2.3608 0.3463
5 4.6046 4.4324 6.6743 2.5644 2.2983 0.3411
6 1.3219 6.5419 3.9647 0.5538 1.9304 0.3312
7 4.8990 6.3516 0.9775 1.8685 4.4091 0.3293
8 2.3781 5.9449 5.5198 -10.5293 2.4298 0.3200
9 2.9441 4.0774 28.9933 26.7153 6.2382 0.2509
10 0.1586 4.1507 31.1601 -6.2883 3.1442 0.1556
11 0.0666 9.1695 1.8344 -12.5095 6.2046 0.1419
12 2.6963 2.9189 6.1145 -2.6067 5.4586 0.1231
13 1.8145 3.7932 2.8537 4.6926 3.4011 0.1214
14 5.4192 52.7913 1.7900 47.0451 2.3219 0.0998
15 3.3965 44.9848 8.3375 3.7923 4.927 0.0918
16 1.8365 0.9909 17.9651 -29.3938 2.0299 0.0727
17 3.9337 -1.6636 4.6165 47.9558 3.434 0.0720
18 2.0641 44.6845 3.0599 1.8455 0.9578 0.0717

75
6.4 Bat Chirp Signal Analysis
Bat is one of species that use ultrasound for echolocation. The research of its
sound is important in scientific research, which providing insights into the biology of
hibernation and sonar mechanisms. There is an experimental chirp data which is emitted
by a large brown bat in the signal analysis literatures [Qia98, Fen01, Wan01, Cap03,
Rub05, and Don06]. It has been used as a benchmark signal for time frequency signal
analysis. Thanks to Beckman Institute, University of Illinois for offering the data, we can
evaluate the proposed signal decomposition algorithms using the bat chirp signal.
The CTSD algorithm is applied to process the bat chirp signal emitted by the large
brown bat, which is digitized within 2.2 ms duration with sampling period of 7 us. Figure
6.6 shows the reconstructed signal using CTSD algorithm (dash line) superimposed the
experimental bat chirp signal (solid line). The parameters of each decomposed chirplet
using CTSD algorithm are listed in the Table 6.3. The bat chirp signal has poor SNR and
contains heavily overlapping chirp components. From the reconstructed signal and its
chirplet transform representation (shown in Figure 6.7c and Figure 6.7d), it can be seen
that the bat chirp signal includes three main stripes. These stripes are highly overlapped
with each other in both time domain and frequency domain, which add the difficulties for
signal analysis. The process results (shown in Figure 6.6, Figure 6.7 and Table 6.3)
clearly demonstrate that the chirplet signal decomposition not only successful analyzes
the contents of bat echoes as the other literatures did, but offer the details of parameters
for better scientific analysis of the species.
Similarly, the MPSD algorithm is evaluated using the same experimental bat chirp
echoes. Figure 6.8 shows the reconstructed signal (dash line) using MPSD algorithm

76
superimposed the experimental bat chirp echoes (solid line). . The parameters of each
decomposed chirplet using MPSD algorithm are listed in the Table 6.4. The WVD
representation of the experimental bat chirp echoes (see Figure 6.9b) shows that the cross
term effect of WVD conceals the characteristics of bat signal. After the process of
MPSD algorithm, the WVD representation of the reconstructed signal (see Figure 6.9d)
suppresses the cross terms and reveals the similar three main stripes in time frequency
domain. The process results (shown in Figure 6.8, Figure 6.9 and Table 6.4) show the
decomposition with high efficiency in the bat chirp signal analysis.
6.5 Summary
In this chapter, the CTSD and MPSD algorithm has been evaluated in the
ultrasonic target detection and bat chirp signal analysis. Experimental results and
performance analysis indicate the robustness of the proposed algorithms in these
applications.

77
Figure 6.6. Experimental Bat Chirp Signal Superposed with Estimated Result (CTSD).
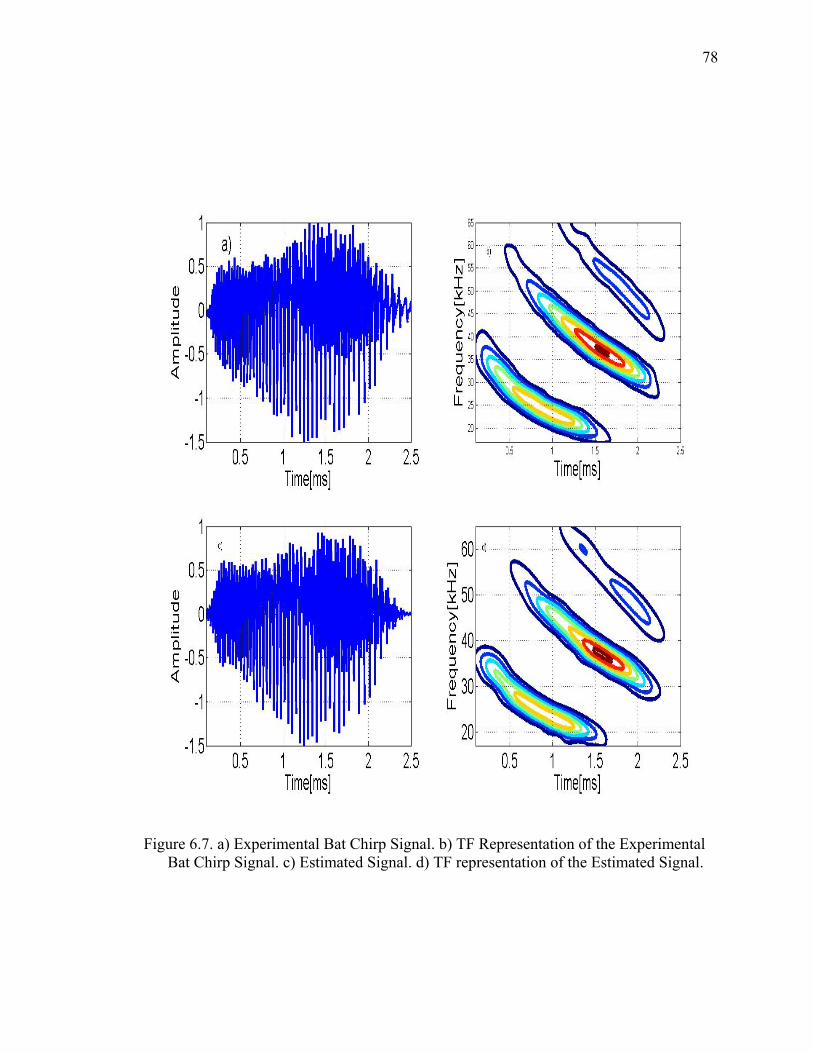
78
Figure 6.7. a) Experimental Bat Chirp Signal. b) TF Representation of the Experimental Bat Chirp Signal. c) Estimated Signal. d) TF representation of the Estimated Signal.

79
Table 6.3. Parameter Estimation Results for Bat Chirp (CTSD)
Echo # τ [μs] ƒc [KHz] α1 [KHz]2 α2 [KHz]2 φ [rad] β
1 1.60 36.9 5.8 -39.7 -2.07 0.995
2 1.20 20.3 16.4 -15.5 2.29 0.830
3 .819 25.0 6.0 -45.4 -1.53 0.761
4 1.10 44.4 37.1 -55.8 -1.1 0.724
5 .854 24.4 12.1 -51.1 0.81 0.723
6 .910 24.0 4.10 -39.2 -0.14 0.646
7 .287 33.9 76.4 -58.9 1.1 0.633
8 1.00 21.2 60.7 -15.6 0.46 0.425
9 .777 50.6 14.4 -87.5 -0.87 0.330
10 2.00 32.0 29.2 -55.9 -1.79 0.313
11 1.80 51.2 6.2 -64.8 -0.83 0.297
12 1.30 60.8 15.1 -62.4 -2.36 0.254
13 2.10 44.3 16.8 -81.9 -1.88 0.168
14 2.00 62.9 68.5 -34.5 1.49 0.155
15 1.30 41.3 194.7 -26.0 -2.53 0.134
16 .917 71.4 51.6 63.7 2.87 0.120
17 1.60 36.0 33.5 -19.3 -2.04 0.120
18 1.70 71.4 27.6 70.2 2.68 0.096
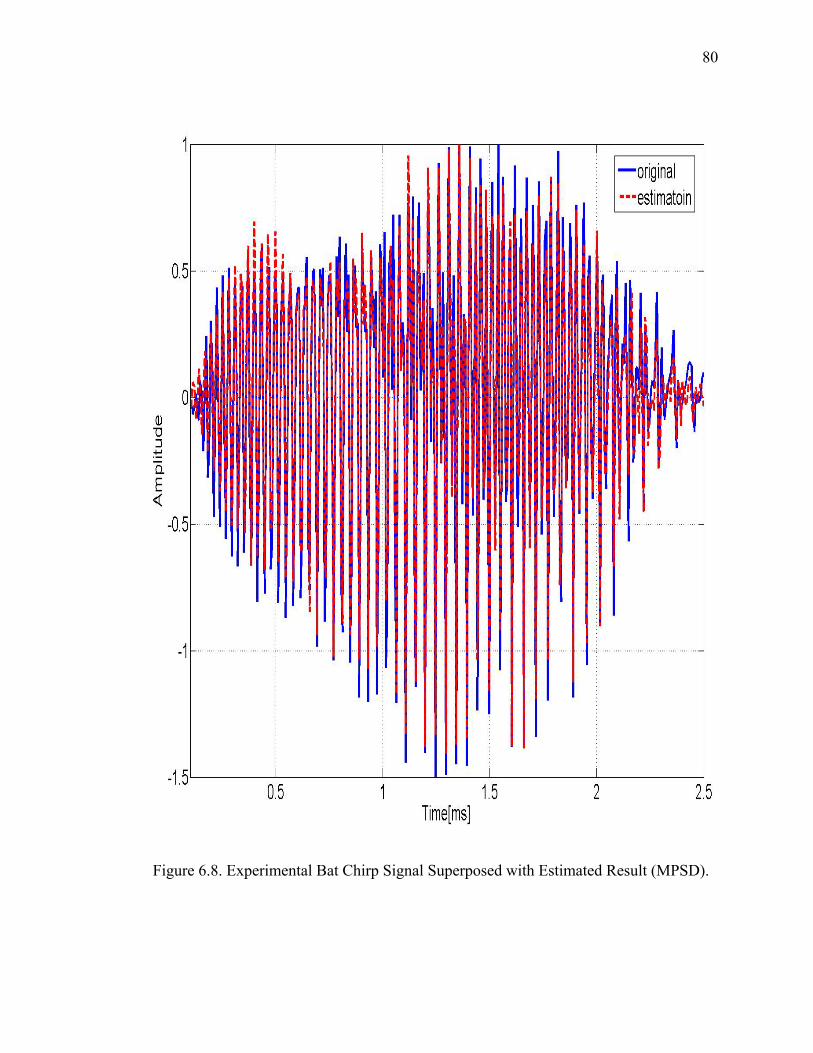
80
Figure 6.8. Experimental Bat Chirp Signal Superposed with Estimated Result (MPSD).

81
Figure 6.9 a) Bat Chirp Signal. b) WVD of Bat Chirp Signal. c) the Reconstructed Signal d) WVD of the Reconstructed Signal Using MPSD Method.

82
Table 6.4 Parameter Estimation Results for Bat Chirp Signal (MPSD)
Echo # τ [μs] ƒc [KHz] α1 [KHz]2 α2 [KHz]2 φ [rad] β
1 1.5221 38.0442 3.40 -44.5 2.8264 0.9643
2 0.9197 24.2786 4.40 -32.8 1.3079 0.8163
3 1.6299 71.7351 47.3 140.8 0.849 0.7093
4 0.3573 32.9623 34.7 -61.6 3.6695 0.691
5 0.7813 50.5118 21.9 -75.7 0.2116 0.4437
6 1.3949 47.2648 464 -248 4.7882 0.411
7 1.7494 63.4931 161.8 -69.6 0.6401 0.345
8 2.1776 38.6767 22.39 720.9 4.5312 0.3418
9 2.0223 33.0028 85.5 34.9 5.6599 0.2551
10 1.6246 37.2038 66.4 -68.9 6.1901 0.2478
11 1.7290 52.4530 24 -66.5 1.8509 0.2176
12 1.8768 48.1554 13.6 335.7 4.2686 0.1948
13 1.2600 56.9456 32.8 105.7 2.6441 0.1914
14 1.1426 52.6449 36.2 595.6 1.2888 0.186
15 1.9481 86.3461 7.8 378.5 1.4591 0.1747
16 1.1534 23.0621 1.8 -34.0 2.5685 0.1501
17 2.1812 32.9059 31.2 297.7 2.5611 0.1056
18 1.8810 36.4662 6.3 162.4 0.5146 0.0733
83
CHAPTER 7
STATISTICAL EVALUATION USING ULTRASONIC GRAIN SIGNAL
7.1 Introduction
In polycrystalline materials, almost all the important mechanical properties of
materials, such as strength, hardness, elasticity and magnetic characteristics, depend on
their grain size. Hence the grain size estimation is critical for material evaluation.
Intercept method is a simple method of grain size measurement. The method counts the
number of grain boundaries intersected by a test line and provides an average intercept
length to match ASTM (American Society for Testing and Materials) grain size number.
The most advantages of this method are its simple interpretation and high computational
efficiency. However, the process to take microscopic examination of the material is slow,
which is not amenable to on-line application and the count of grain number is subjective.
A considerable effort has been directed to estimate grain size by using ultrasonic
backscattered grain signals. More recently, the homomorphic processing, low-order
autoregressive models, and neural network have been applied to ultrasonic backscattered
signals for grain sizing [San89, Wan91].
This chapter presents the application of CTSD algorithm in grain size estimation.
First, a frequency-dependent statistical model of ultrasound backscattered grain echoes is
addressed [San81, Wan91]. Through the analysis of this model, the connection between
frequency shift trends of grain echoes with the average grain size of materials is revealed.
Furthermore, as an alternative technique of material evaluation, the proposed CTSD
algorithm is used to decompose the ultrasonic experimental backscattered echoes, which
are measured from different samples with different average grain size, into chirplets.

84
Then, the estimated parameters of chirplets are used to evaluate the average grain size of
specimens.
7.2 Ultrasonic Backscattered Model
Based on the fact that the ultrasonic wave traveling through materials undergoes
energy loss due to absorption and scattering, The amplitude of the backscattered
signal, bA , can be modeled as [San89]
∫=
∫=
−
+−
z
zas
dzfz
s
dzfzfz
sb
efzA
efzAA
0
0
),(2
0
)),(),((2
0
),(
),(α
αα
α
α (7.1)
Where 0A denotes the initial amplitude, ),( fzsα denotes the scattering coefficient,
which is depend on position, z , and frequency , f . Similarly, ),( fzaα denotes the
absorption coefficient, and ),( fzα denotes the overall attenuation coefficient, which is
the combination coefficient of absorption and scattering. If the materials exhibit
homogeneous properties as a function of position z , then the Equation 7.1 can be
simplified to
zfsb efAA )(2
0 )( αα −= (7.2)
In general, grain scattering losses are larger compared to absorption losses. The
scattering formulas have been intensively studied and classified into distinct scattering
regions based on the ratio of sound wavelength, λ , to the mean grain diameter,
D [San89]. The scattering regions are tabulated in Table 7.1. In Rayleigh scattering
region, where the ultrasound wavelength is much greater than the mean grain diameter,
85
the scattering coefficient varies with the average volume of the grain ( 3D ) and the
fourth power of ultrasonic wave frequency, while absorption increases linearly with
frequency. Since Rayleigh scattering )( fsα shows high sensitivity to the variation in
grain size and frequency, the Rayleigh scattering region will be of our primary concern.
The attenuation coefficient can be represented in terms of the grain size and frequency
4321)( fDff ααα += (7.3)
Where 1α denotes the absorption constant, 2α is the scattering constant, and f denotes
the wave frequency. In the Rayleigh scattering region, the scattering coefficient )( fsα
is a function of frequency ( λDf ∝ ) [San81]. High frequency components exhibit
larger intensity in backscattered echoes compared with the low frequency components.
Consequently, this situation results in an upward shift in the expected frequency of the
power spectrum corresponding to the broadband echoes. Since the spectral shift is grain
size dependent, the estimate of the upward shift can be used for grain size
characterization. Furthermore, from the Equation 7.2 it can be seen that the term
zfe )(2α− influences the frequency shift in a downward direction. The downward shift is
dependent on the position of the scatters relative to the transmitting/receiving transducer.
The two opposing phenomena (i.e., upward shift due to scattering and downward shift
caused by attenuation) can potentially be used grain size evaluation. Estimating the
frequency shift can be achieved from random patterns of grain echoes, which is a
challenging task.

86
Table 7.1 Scattering Coefficients as a Function of Mean Grain Diameter and Frequency.
Scattering region Scattering function Relationships
Rayleigh 431 fDC D>>λ
Stochastic 22 fDC D≈λ
Diffusive
DC3 D<<λ
87
7.3 Grain Size Evaluation Using Ultrasonic Backscattered Echoes
The techniques based on attenuation measurements and scattering measurements
as a mean of estimating grain size have long been recognized. In the techniques based on
attenuation measurement, the reflected echo from front surface and back surface of the
specimens are compared. It has several practical limitations, i.e., a flat and parallel
surface is essential for efficient measurement, a good coupling condition between
transducer and the specimens is required for minimum energy losses. Moreover, the
attenuation coefficient only represents an average value over the propagation path,
whereas the attenuation variation due to the local grain structure can not be evaluated.
Despite these factors, attenuation measurement techniques are still wide used in practical
applications for the integrated estimation in a relatively simple fashion.
In the techniques based on scattering measurement, some researchers demonstrate
that the attenuation of ultrasonic backscattered echoes with depth is related to the average
grain size of the specimen. And the utilization of the ultrasonic backscattered signal has
been proven to be an efficient way to evaluate grain size [San89, Wan91]. Various signal
processing techniques, such as homomorphic processing, time averaging, autocorrelation,
and moment analysis, have been applied to evaluate the ultrasonic backscattered signal
for grain size estimation. The nature of these techniques limits the efficiency of grain size
estimation. For example, autocorrelation prefers the periodicity of data; moment analysis
does not show significant sensitivity to grain size variation, homomorphic processing is
to smooth the power spectrum of the backscattered signal for correlation process.
As an alternative technique of grain size evaluation, the CTSD algorithm is
applied to evaluate the grain size of specimens. The experiments are conducted using a

88
Panametrics transducer A3062 with nominal center frequency 5 MHz with sampling rate
100 MHz. Steel blocks with different grain sizes were examined. The different structures
and correspondingly different grains in specimens are often obtained by using different
heat treatments. In our experiment, the grain size of reference sample (without heat
treatment) is 14 μm. Two of steel blocks were annealed at 1600oF and 1900oF for 4 hours
heat, then air cooled to room temperature, that increased the average grain size to 24 μm
and 50 μm, respectively. The micrographs with 400 magnifications of all three specimens
are shown in Figure 7.1.
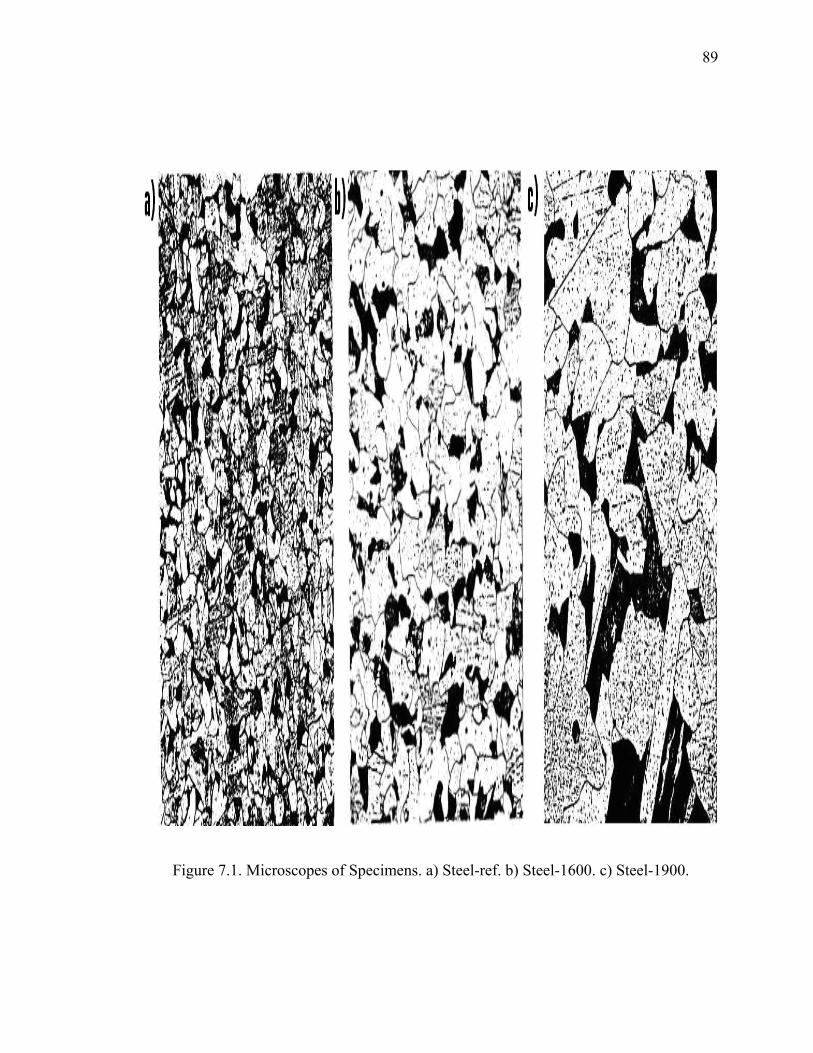
89
Figure 7.1. Microscopes of Specimens. a) Steel-ref. b) Steel-1600. c) Steel-1900.
90
The ultrasonic measurements were performed using immersion testing technique.
The transducer impulse response, measured using the flat front surface echo from sample
#5, was used as the reference frequency in the comparison of frequency shift. It is also
noted that there is a small offset between the nominate center frequency of transducer
with the estimated one of the front surface echo [refer to Table 7.2 and Table 7.3]. The
measured grain signals from all the blocks and their magnitude spectrums are shown in
Figure 7.2. All the grain signals have a 20.48 μs duration corresponding to grain
scattering inside the steel specimens.
To estimate the average frequency of the grain echoes efficiently, the following
strategies are used. We use a single A-scan data set to complete the estimation process.
The measured grain echoes are divided into 8 data sections and the duration of each
section is 2.56 μs. The CTSD algorithm is utilized to estimate the first 10 dominant
chirplets per section. To emphasize the effect of grain which has greater size than its
neighbor (i.e., the echoes with highest energy), a normalized weight factor of amplitudes
is introduced into the estimation of average frequency. The average frequency of the
grain echoes is evaluated as following.
∑∑
∑=
=
==M
iN
jj
N
jjcjf
Mf
1
1
2
1
2
)ˆ
ˆˆ
(1
β
β
(7.4)
Where cf̂ is the estimated center frequency of chirplet, β̂ is the estimated amplitude of
chirplet, i is the data section number, j is the chirplet number for each section, 8=M ,
and 10=N .
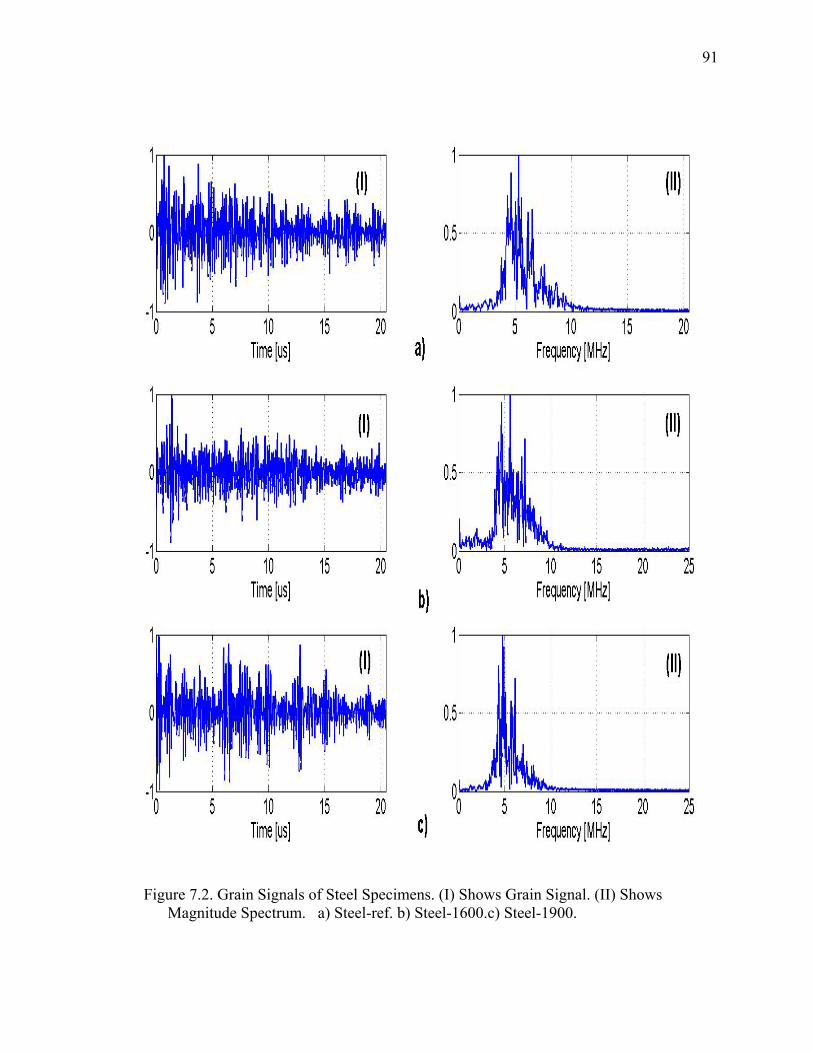
91
Figure 7.2. Grain Signals of Steel Specimens. (I) Shows Grain Signal. (II) Shows Magnitude Spectrum. a) Steel-ref. b) Steel-1600.c) Steel-1900.

92
As discussed in Section 7.2, there is an inherent upward shift in the frequency of
the grain echoes due to scattering, and a downward shift caused by the attenuation effect.
In all the measured grain signals, it was observed that the upward shift in the frequency is
far more dominating than the downward shift. The quantitative center frequencies of
grains are presented in the Table 7.2. As shown in the table, all specimens exhibit an
upward shift in the frequency due to the scattering effect compared to reference echo.
However, since attenuation begins to dominate as the grain size increases, the degree of
upward shift is reduced with respect to the reference signal for larger grained samples.
Fox example, steel-1900(the specimen with the largest grains) shows a lower upward
frequency shift than the other two samples. Note that steel-1600 shows a slightly higher
upward frequency shift in the estimated frequency than the steel-ref specimen, which is in
consistent with the model prediction. This discrepancy may be caused by the estimation
error and/or possible inherent variations in the scattering properties of the grains. It is
important to point out that the quantitative relationship between the average grain size
and the expected frequency shift is dependent on the type of material, the quality of grain
boundaries, as well as the characteristics of the measuring instruments. Therefore, proper
interpretation of the presence or absence of frequency shift in the measured data needs to
be carefully examined prior to its application to grain size characterization.

93
Table 7.2. Upward Frequency Observed for Grain Signal from Steel Specimens.
Sample Grain Size [μm] Estimated frequency [MHz]
Front Surface N/A 4.6635
Steel_ref 14 μm 5.5703
Steel_1600 24 μm 5.5934
Steel_1900 50 μm 5.0190
7.4 Summary
In this chapter, a model for the grain signal has been presented, which includes
the effect of frequency dependent scattering and attenuation. This model predicts that the
expected frequency increases with scattering and decreases with attenuation. The
proposed chirplet signal decomposition algorithm was used for estimating the expected
frequency. The experimental and analytical results not only verify that the spectral shift is
correlated with the grain size of the materials but also provide quantitive evaluation of the
frequency shift. Overall, the CTSD algorithm exhibits a new angle to extract the useful
information of average grain size information from ultrasonic backscattering echoes.

94
CHAPTER 8
ULTRASONIC REVERBERANT APPLICATION
8.1 Introduction
In ultrasonic imaging applications, the problem of reverberating patterns arises
frequently. The reverberant echoes which comprise the entire signal complicate the
characterization of objects. For example, in medical imaging system, the multiple
reflection produced by reverberations in the bone become the dominant feature and
obscure signals from surrounding tissue. In ultrasonic non-destructive material evaluation
applications, the reverberant patterns usually occur in the measurement of thin planar
defects in metal, lamination of composite bonds, gap thickness measurements of metal
adhesively bonded system, and fatigue crack analysis, etc. A theoretical model was
successfully developed to characterize the multilayered reverberant environment that
exists in the detection of corrosion or volatile changes in the steam generator tubing
system [San89].
In this chapter, The CTSD algorithm application in ultrasonic multilayered
reverberant structure is presented. First, a theoretical reverberation model is reviewed.
The model describes the reverberation phenomenon for multilayered structures and
provides critical insight in the characterization of boundaries of multilayered structures.
Then, the proposed CTSD algorithm is utilized to analyze an experimental reverberant
signal from multilayered structures. The physical properties of the multilayered
structures are appropriately interpreted by the estimated parameters of chirplets.

95
8.2 Reverberant Signal Model for Multilayered Structures
For the sake of developing a theoretical base of analyzing the backscattered
echoes from a highly reverberant discrete structure, the case of a single thin layer is
examined first. Figure 8.1 illustrates an outline of the reverberation process which shows
the normal incident beam and the corresponding transmitted and reflected beams as a
function of time, where region I , region II, and region III are defined by their density ,
and the velocity of sound in that media. The incident ultrasonic beam impinging the thin
layer is partially reflected and transmitted at each boundary as shown in Figure 8.1. Using
the characteristic impedances, the reflection and transmission coefficients of each
boundary can be calculated using
ji
jiij ZZ
ZZ+−
=α and ji
iij ZZ
Z+
=2β (8.1)
Where ijα and ijβ are the reflection and transmission coefficients of adjacent regions i
and j , respectively.

96
Figure 8.1. Reverberation Path in Single Thin Layer.
The multiple received echoes from a single layer can be modeled as
∑∞
=
−+=1
212 )2()()(k
k kTtuatutr α (8.2)
Where 121232112
−= kkka ααββ , )( tr is received signals, iT is the time it takes the
echo to travel the ith region, and )( tu is the impulse response of the measuring system.
From Equation 8.2, it can be seen that the received signal can be thought of as a set of
multiple echoes spaced evenly apart in time, separated by a time 22T .The thickness of
the layers can be determined by the differential time-of-arrival of these echoes. The time
between echoes is 22 T , and this can be used calculate the thickness of region i , id ,
Since
iii Td υ= (8.3)

97
Where iυ is the velocity of sound in the ith region.
With multilayered structures, the recognition of reverberant patterns is more
complex due to multiple interfering echoes produced at each interface [San89]. The
multilayered structure consisting of four different regions is shown in Figure 8.2.
Figure 8.2. Multilayered Structures Consisting of Four Different Regions.
Similarly, the received signal is comprised of multiple echoes detected after
traveling k times in region II and l times in region III.
∑∑∞
=
∞
=
−−=0 0
32 )22()(k l
kl lTkTtutr γ (8.4)
Where the term klγ is the received echo amplitude related to the reflection coefficient,
ijα , or the transmission coefficient, ijβ . It is important to point out that the term klγ
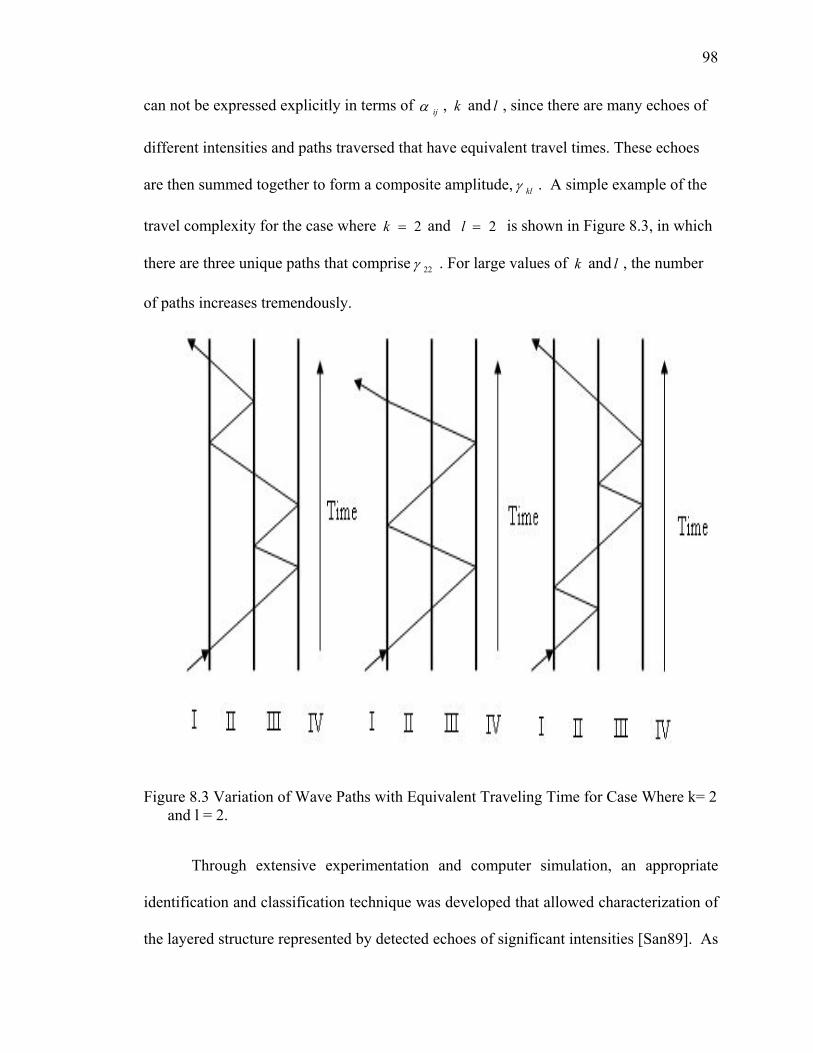
98
can not be expressed explicitly in terms of ijα , k and l , since there are many echoes of
different intensities and paths traversed that have equivalent travel times. These echoes
are then summed together to form a composite amplitude, klγ . A simple example of the
travel complexity for the case where 2=k and 2=l is shown in Figure 8.3, in which
there are three unique paths that comprise 22γ . For large values of k and l , the number
of paths increases tremendously.
Figure 8.3 Variation of Wave Paths with Equivalent Traveling Time for Case Where k= 2 and l = 2.
Through extensive experimentation and computer simulation, an appropriate
identification and classification technique was developed that allowed characterization of
the layered structure represented by detected echoes of significant intensities [San89]. As

99
a result of classification the generalized model for the received echoes given in Equation
8.4 can be re-organized differently:
⋅⋅⋅+−−+
−−+
−+=
∑
∑
∑
∞
=
∞
=
∞
=
023
123
1212
)24(
)22(
)2()()(
kk
kk
kk
kTTtuc
kTTtub
kTtuatutr α
(8.5)
Where ka is the amplitude of the class “a” echoes, which reverberate in region II only;
kb is the amplitude of the class “b” echoes, which reverberate continually in region II
and once in region III; kc is the amplitude of the class “c” echoes, which reverberate
continually in region II and twice in region III; etc.
The amplitude of these classes of echoes has explicitly close-forms:
kk Aa 0
21
2112 )(αββ
= ; for 1≥k
101
21
2112 )( −= kk AAkb
αββ
for 1≥k
221
21121 Ac
αββ
=
⎥⎦⎤
⎢⎣⎡ −
+= −− 20
21
102
21
2112
21)( kk
k AAkAAkcαββ
for 1>k
where 211
32343223 αααββ −= nnnA . (8.6)
The amplitude of echo pulse 1+ka is less than that of ka due to energy loss at
the boundary of region II. Each time the incident sound reaches the back surface of

100
region II, a small fraction of it passes into the water gap (region III) and reverberates
between adjacent region II and region IV. Each time a sound packet returns to region II, a
small fraction of its energy is transmitted through it toward the transducer. Each time the
“a” type wave packet reaches the back surface of region II it generates a water gap wave
packet which, upon returning to the region, adds energy to the “b” series of signals. Thus
the class “a” pulses decrease with time whereas the “b” series should actually increase
with time, at least until it in turn loses energy to a “c” type wave train. Class “c” echoes
consist of region II reverberations which have traversed region II twice. However,
because such a ray passes from region II and III four times, it lost most of its energy.
Therefore, the class “c” echoes reaching the transducer is negligible compared to the “a”
and “b” class echoes, at least for the first few reverberations.
The maximum of “b” echoes in terms of the reverberation number k can be found
by setting
0=dkdb k (8.7)
,which leads to the solution of k as following.
2321log
1αα
−=k (8.8)
In the specific case for which regions I and III are water, the maximum value of kb
varies according to the characteristic impedance of region II relative to regions I and III.
One of major advantages of wave classification is that class “b” echoes increase
while class “a” echoes decrease. This increase is true for several reverberations and
depends solely on the characteristics of region III (or the first thin layer). The effect of
region IV changes the class “b” linearly, as can be seen in Equation 8.6. As the
101
impendence of region IV increase, kb increase, this is a highly desirable situation for
detection.
8.3 Experimental Reverberant Signal Analysis
An immersion ultrasonic testing experiment is conducted to verify the reverberant
model discussed in section 8.2. The multilayered structure is constructed as Figure 8.2.
The region I and region III are both water. Region II is a thin aluminum layer and region
IV is steel. The nominal center frequency of the transducer used in the experiment is 10
MHz. The sampling frequency is 100 MHz. The CTSD algorithm is applied to the
experimental reverberant data. The reconstructed signal compared with original acquired
signal is shown in Figure 8.4, where CTSD algorithm has successfully reconstructed the
multilayered reverberant echoes. It gives clear indication of the equally-spaced for each
type of echoes. The thickness of thin layer (region II) and gap size(region III) can be
determined from this figure, where the thickness of the thin layer corresponds to the
delay between the peaks of the echoes within each class, and the gap distance is given by
the time delay between the “a” and “b” echoes. Similar discussions should be hold for
class “c”, but their amplitudes are much smaller than class “a” and “b” echoes.
The interesting observation of the experimental signal would be that we can see
exactly the same trend of echoes as we discussed in the theoretical model part. The class
“a” pulses decreases with time. Whereas the class “b” pulses increase for the first two
echoes, then decrease with time.
102
The estimated coefficients of reverberant echoes are listed in the Table 8.1. To
clearly demonstrate this point, Figure 8.5 shows the amplitude trend of each type of
echoes as a function of reverberation number.
From the amplitudes of “a” echoes, it can be seen that the “a” echoes decrease
with the time. The trend of “b” echoes can be clearly shown in the amplitudes of “b”
echoes and the 2b is the maximum position of “b” echoes. The class “c” echoes shows
similar analytical predictable pattern.
Furthermore, from the time-of-arrival (TOA) of each echo, we can get more
accurate information of the physical properties in the multilayered structure. For example,
it is difficult to estimate the thickness of thin layers (region II) and the water gap (region
III) directly from the acquired experimental reverberant echoes. But from the analysis of
theoretical model (Equation 8.5), the thickness of thin layer (region II) and the water gap
(region III) can be estimated by using the difference of TOA. Table 8.2 shows the mean
and variance of differential TOA.
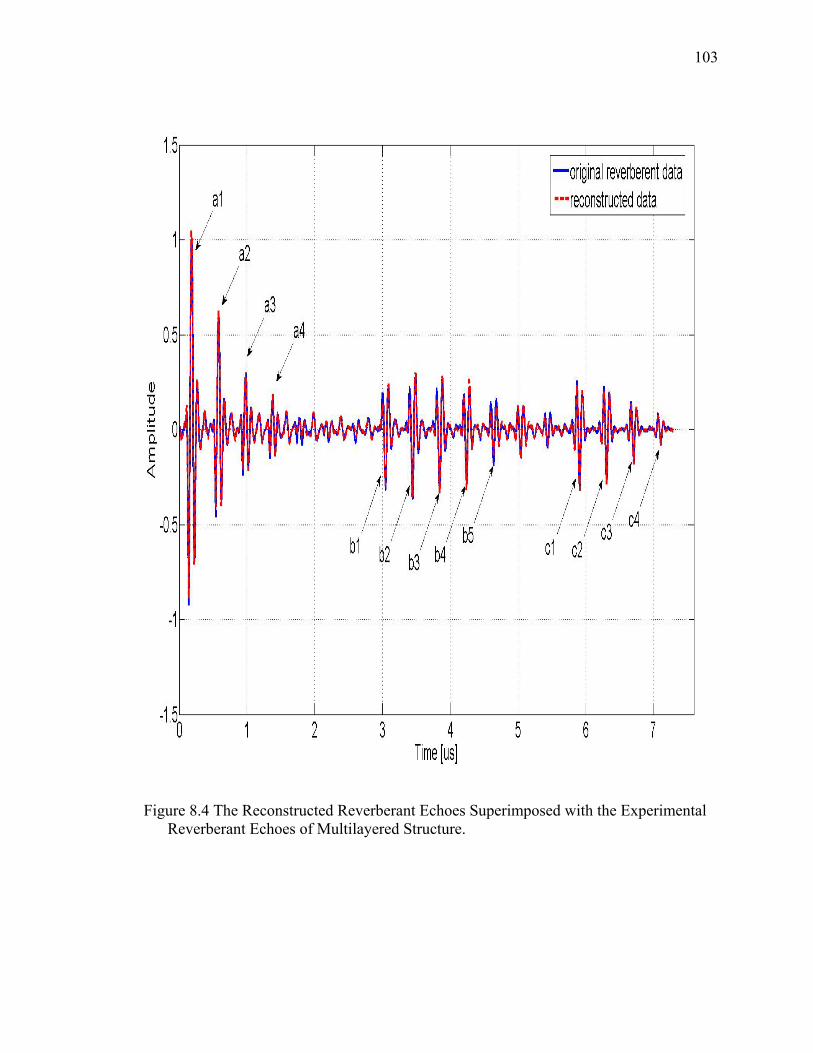
103
Figure 8.4 The Reconstructed Reverberant Echoes Superimposed with the Experimental Reverberant Echoes of Multilayered Structure.

104
Table 8.1 Parameter Estimation Results for Multilayered Echoes
Echo # τ [μs] ƒc [MHz] α1 [MHz]2 α2 [MHz]2 φ [rad] β
1 0.1831 11.1404 229.7586 3.5904 0.0779 1.1382
2 0.5852 11.2404 244.5782 0.9211 0.3462 0.6309
3 3.4572 11.1145 244.542 -14.6025 4.1175 0.3928
4 3.8557 11.5223 240.7805 -40.5047 4.1102 0.3537
5 3.0557 10.9688 236.1624 3.5828 3.889 0.3284
6 5.9069 11.7796 219.31 -83.2543 2.9164 0.3186
7 0.9873 12.1638 183.3116 -44.3458 0.5794 0.2951
8 6.3088 11.883 222.0873 -79.0206 3.1164 0.2896
9 4.2519 11.786 233.4656 -50.6818 3.9311 0.2863
10 6.7044 12.16 222.8523 -73.6151 2.7945 0.1826
11 1.3858 12.379 162.7031 -31.1011 0.6197 0.1701
12 0.1432 24.475 299.6772 392.5027 3.4329 0.1215
13 7.0937 12.3787 240.933 -14.9299 1.8785 0.0866
14 0.5353 25.7388 213.7115 224.1187 2.8381 0.0717
15 4.6347 12.64 288.4906 -418.518 2.9257 0.0713
16 4.9225 10.0279 2.4084 0.3902 2.0884 0.061
17 4.971 3.8477 1.8516 19.5616 3.3601 0.0587
18 1.9213 8.9813 23.1733 -44.9612 3.334 0.0557
19 -0.835 42.2438 0.3819 -70.0109 6.0739 0.0555
20 4.9312 12.4694 2.9666 2.2405 0.7224 0.0497
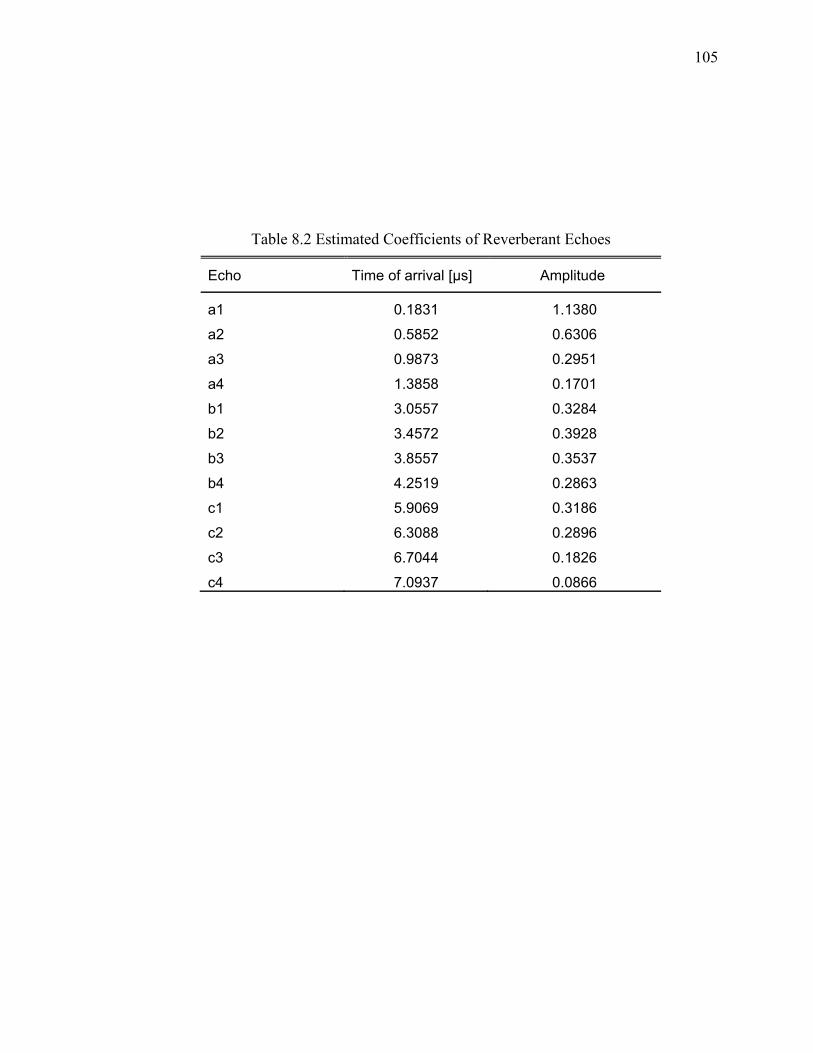
105
Table 8.2 Estimated Coefficients of Reverberant Echoes
Echo Time of arrival [μs] Amplitude
a1 0.1831 1.1380
a2 0.5852 0.6306
a3 0.9873 0.2951
a4 1.3858 0.1701
b1 3.0557 0.3284
b2 3.4572 0.3928
b3 3.8557 0.3537
b4 4.2519 0.2863
c1 5.9069 0.3186
c2 6.3088 0.2896
c3 6.7044 0.1826
c4 7.0937 0.0866

106
1 2 3 40
0.2
0.4
0.6
0.8
1
1.2
Reverberation number
Am
plitu
de
a echob echoc echo
Figure 8.5. Comparison of Envelope of Class “a” Echoes, “b” Echoes and “c” Echoes.
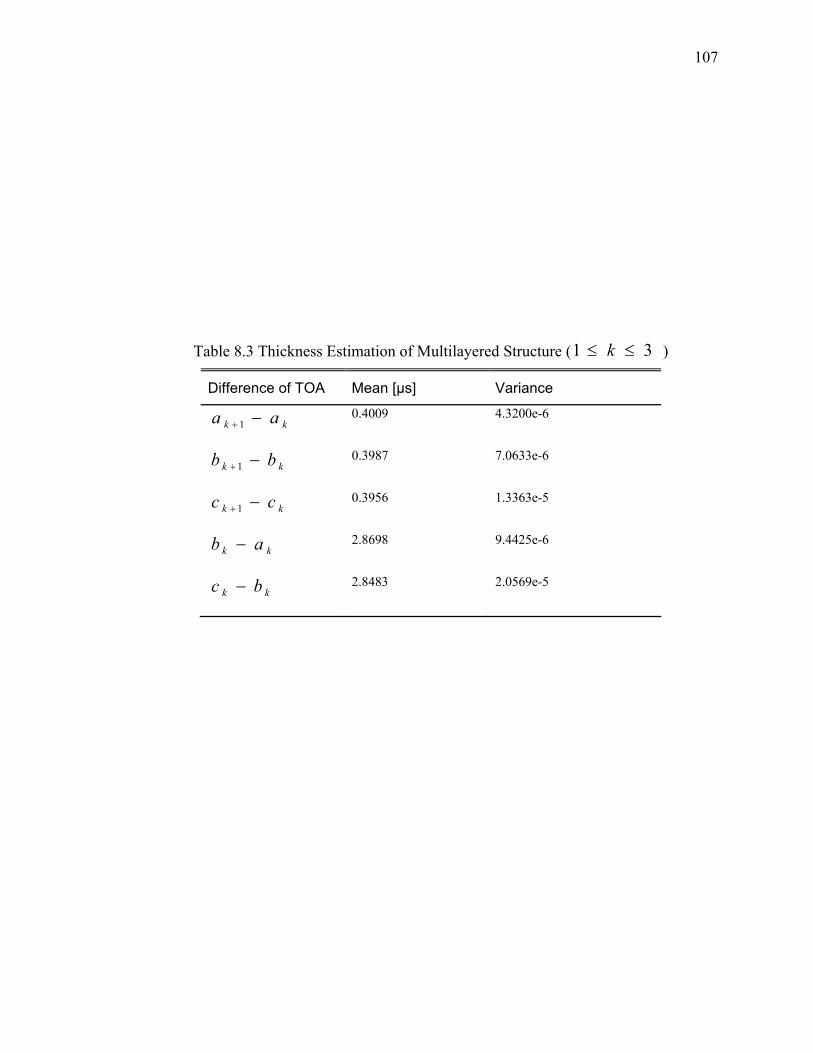
107
Table 8.3 Thickness Estimation of Multilayered Structure ( 31 ≤≤ k )
Difference of TOA Mean [μs] Variance
kk aa −+1 0.4009 4.3200e-6
kk bb −+1 0.3987 7.0633e-6
kk cc −+1 0.3956 1.3363e-5
kk ab −
2.8698 9.4425e-6
kk bc −
2.8483 2.0569e-5

108
8.4 Summary
In this chapter, we have analyzed theoretical model of multilayer structure. An
echo classification model of multilayered structure has been developed to reveal the
physical nature of reverberant path and re-grouped the general expression of reverberant
signal into different type of sequential echoes based on the traveling distance in the media.
The chirplet signal decomposition algorithm has been utilized to reconstruct the
experimental ultrasonic multilayered reverberant echoes with high accuracy. The
expected echo patterns, based on the theoretical model, not only have been shown in the
acquired experimental ultrasonic data, but also shown by the parameter estimation results
of chirplet signal decomposition algorithm. Through extensive experimental studies we
have shown that the reverberation model of thin layers coupled with chirplet signal
decomposition allows for a very accurate estimation of transmission/reflection properties
of each layer and also leads to an accurate estimation of the thicknesses of the layers by
an order of magnitude beyond the resolution of the ultrasonic measuring system.
109
CHAPTER 9
EMBEDDED FPGA-BASED DSP SYSTEM FOR SIGNAL DECOMPOSITION
9.1 Introduction
Field programmable gate arrays (FPGAs) are digital integrated circuits that
contain configurable logic blocks (CLBs) along with programmable interconnects
between these blocks. The Virtex series FPGAs are intended as system integration
platform which offer a combinations of performance, capability, and low system cost.
The Virtex integrates high level of system functions such as processors, delay lock loops,
clock managers, memory, and serial transceivers on a single FPGA chip [Xil06a].
Due to the flexibility of the FPGA to add custom hardware to accelerate software
bottlenecks and its quick development time, speeding the prototype process by allowing
in-platform testing and debugging of the system, we choose the Xilinx University
Program Virtex II Pro (XUPV2P) development board to verify the CTSD algorithm. The
XUPV2P board provides an advance hardware platform that has a 100 MHz system clock
and consists of a high performance Virtex-II Pro platform FPGA (i.e., XC2VP30)
surrounded by a comprehensive collection of peripheral components such as RS-232, on-
board 10/100 Ethernet device, up to 2GB of Double Data Rate(DDR) SDRAM, AC-97
audio CODEC, and on-board video port[Xil05].
Moreover, Xilinx provides its own implementation of a 32 bit RISC processor
soft core (i.e., MicroBlaze), which is tailored and optimized for implementation in Xilinx
FPGAs with minimum configurable logic resource. It features a 5-stage pipeline, with
most instructions completing in a single cycle. Both instruction and data words are 32
bits. Many aspects of the MicroBlaze can be configured at compile time due to the

110
configurable nature of FPGAs[Xil06a]. The XC2VP30 FPGA can be configured to
contain multiple MicroBlaze cores for multiprocessor system design. One of the most
useful features of the MicroBlaze is the fast simplex link (FSL) bus, which provides a
simple and high-throughput point-to-point communications between MicroBlaze and
custom hardware cores. The MicroBlaze has special assembly instructions to place and
retrieve data on and from the FSL bus.
In this chapter, the CTSD algorithm is implemented as a System-on-Chip (SoC)
based on Xilinx Virtex-II Pro FPGA to rapid prototype and further probes its suitability
for embedded hardware [Sor06]. The CTSD algorithm is implemented in software and
profiled with standard software tools to identify the parts of the algorithm which consume
the most execution time. The dedicated hardware accelerator is designed to increase the
performance of the embedded system. Simulated and experimental ultrasonic signals are
used to verify the functionality of the system design.
9.2 Embedded DSP System Based on Xilinx Virtex II Pro FPGA
From a computational complexity standpoint, the complexity of the chirplet
transform, a correlation operation between the signals and the scaled chirplet kernels (see
Equation 3.2), is )( mnO , where m is the number of scaled chirplets, and n is the
number of samples in the signal. The windowing process of chirplet transform is a linear
search with computational complexity )( nO . In other words, the time-frequency
representation of the signal depends on the sampling frequency and the scale size of the
chirplet kernel. Meanwhile, in the successive parameter estimation stage, each parameter
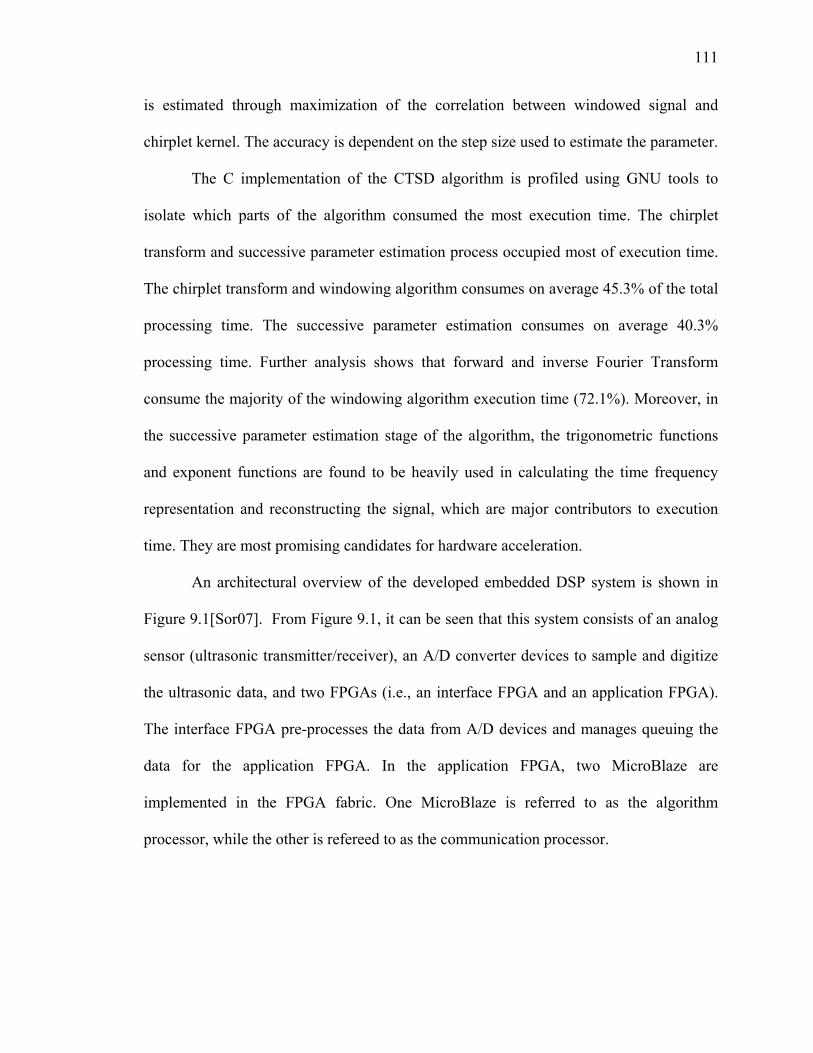
111
is estimated through maximization of the correlation between windowed signal and
chirplet kernel. The accuracy is dependent on the step size used to estimate the parameter.
The C implementation of the CTSD algorithm is profiled using GNU tools to
isolate which parts of the algorithm consumed the most execution time. The chirplet
transform and successive parameter estimation process occupied most of execution time.
The chirplet transform and windowing algorithm consumes on average 45.3% of the total
processing time. The successive parameter estimation consumes on average 40.3%
processing time. Further analysis shows that forward and inverse Fourier Transform
consume the majority of the windowing algorithm execution time (72.1%). Moreover, in
the successive parameter estimation stage of the algorithm, the trigonometric functions
and exponent functions are found to be heavily used in calculating the time frequency
representation and reconstructing the signal, which are major contributors to execution
time. They are most promising candidates for hardware acceleration.
An architectural overview of the developed embedded DSP system is shown in
Figure 9.1[Sor07]. From Figure 9.1, it can be seen that this system consists of an analog
sensor (ultrasonic transmitter/receiver), an A/D converter devices to sample and digitize
the ultrasonic data, and two FPGAs (i.e., an interface FPGA and an application FPGA).
The interface FPGA pre-processes the data from A/D devices and manages queuing the
data for the application FPGA. In the application FPGA, two MicroBlaze are
implemented in the FPGA fabric. One MicroBlaze is referred to as the algorithm
processor, while the other is refereed to as the communication processor.
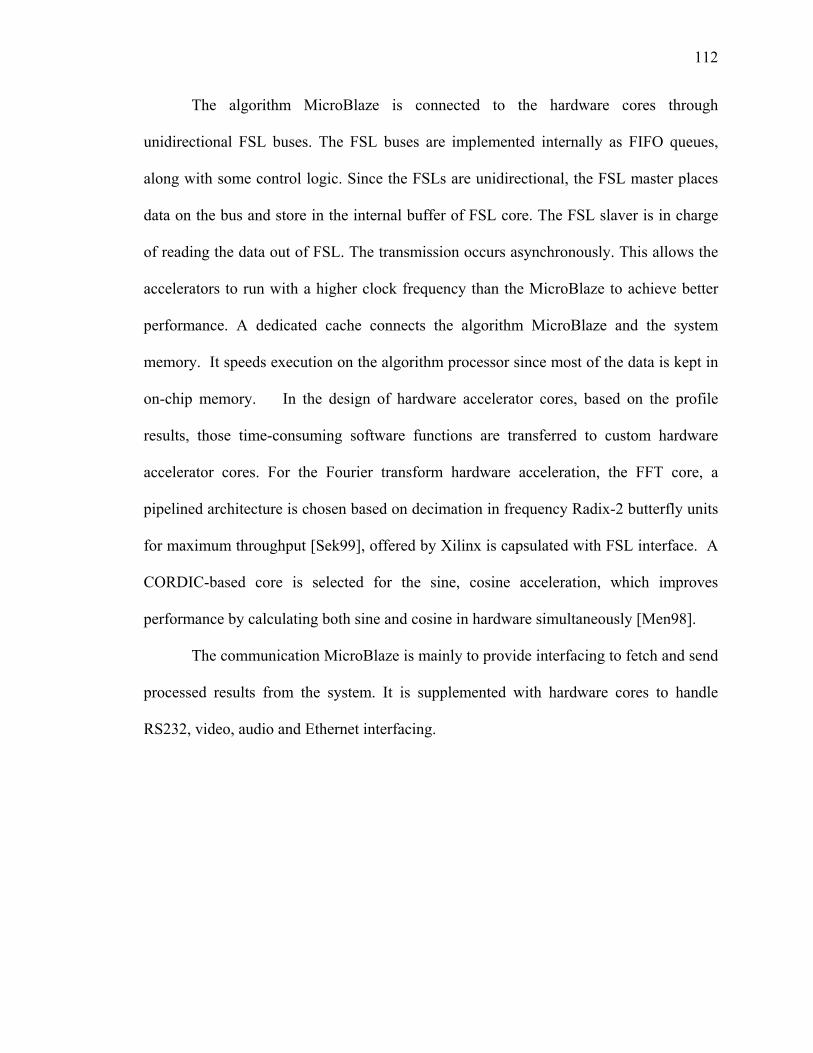
112
The algorithm MicroBlaze is connected to the hardware cores through
unidirectional FSL buses. The FSL buses are implemented internally as FIFO queues,
along with some control logic. Since the FSLs are unidirectional, the FSL master places
data on the bus and store in the internal buffer of FSL core. The FSL slaver is in charge
of reading the data out of FSL. The transmission occurs asynchronously. This allows the
accelerators to run with a higher clock frequency than the MicroBlaze to achieve better
performance. A dedicated cache connects the algorithm MicroBlaze and the system
memory. It speeds execution on the algorithm processor since most of the data is kept in
on-chip memory. In the design of hardware accelerator cores, based on the profile
results, those time-consuming software functions are transferred to custom hardware
accelerator cores. For the Fourier transform hardware acceleration, the FFT core, a
pipelined architecture is chosen based on decimation in frequency Radix-2 butterfly units
for maximum throughput [Sek99], offered by Xilinx is capsulated with FSL interface. A
CORDIC-based core is selected for the sine, cosine acceleration, which improves
performance by calculating both sine and cosine in hardware simultaneously [Men98].
The communication MicroBlaze is mainly to provide interfacing to fetch and send
processed results from the system. It is supplemented with hardware cores to handle
RS232, video, audio and Ethernet interfacing.
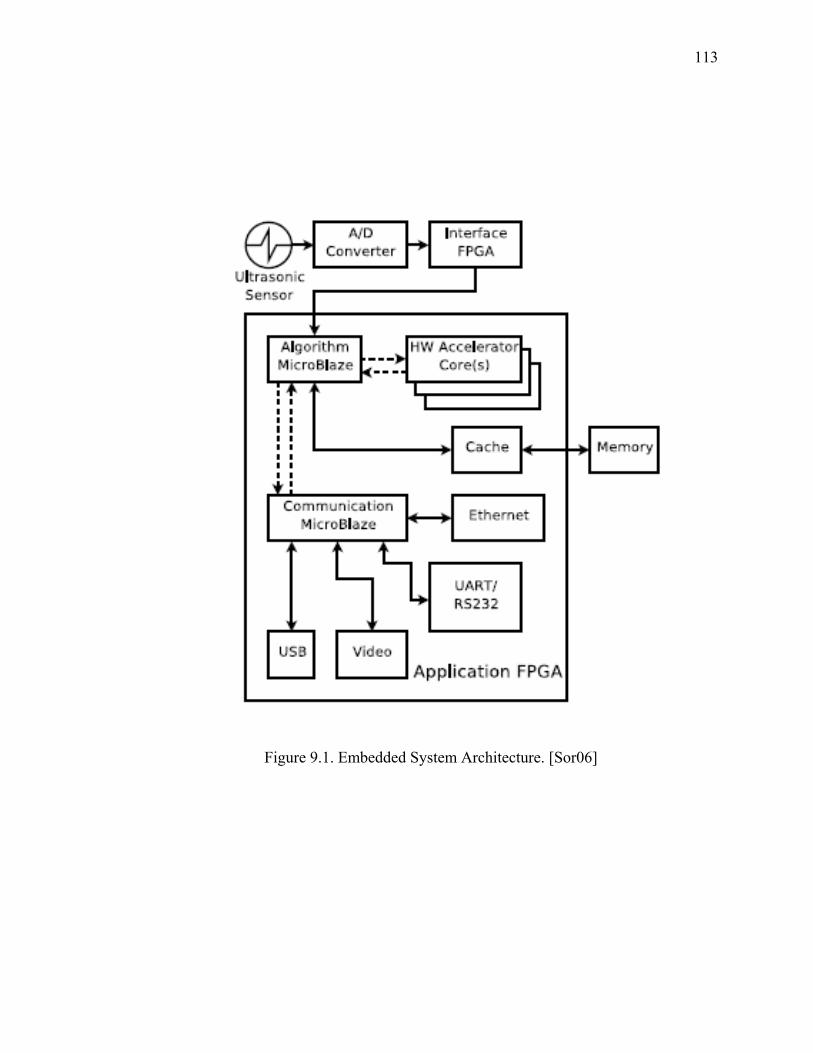
113
Figure 9.1. Embedded System Architecture. [Sor06]

114
Figure 9.2 shows the process results of processing actual experimental ultrasonic
measurements through the system. These results show that the reconstructed signal
demonstrates high fidelity to the original signal. Also, the result of estimated parameters
for each echoes from FPGA system matched the results obtained from software
implementation of the CTSD algorithm, proving the feasibility of constructing an
embedded implementation of the CTSD algorithm.
9.3 Summary
In this Chapter, A Xilinx Virtex II Pro FPGA-Based DSP system is designed to
verify the feasibility of hardware implementation of CTSD algorithm. Embedded
MicroBlaze processors and FSL buses are utilized to manage the hardware system. Based
on the profile results of CTSD algorithm, hardware acceleration cores such as FFT cores
and CORDIC-based core are used to accelerate the computation of the algorithm. The
simulation and experimental results functionally verified the system design. This work
demonstrates an embedded FPGA-based DSP system for ultrasonic detection and
estimation using the CTSD algorithm. Further algorithm analysis and hardware
acceleration strategies are expected to be done for the future real time ultrasonic signal
processing.
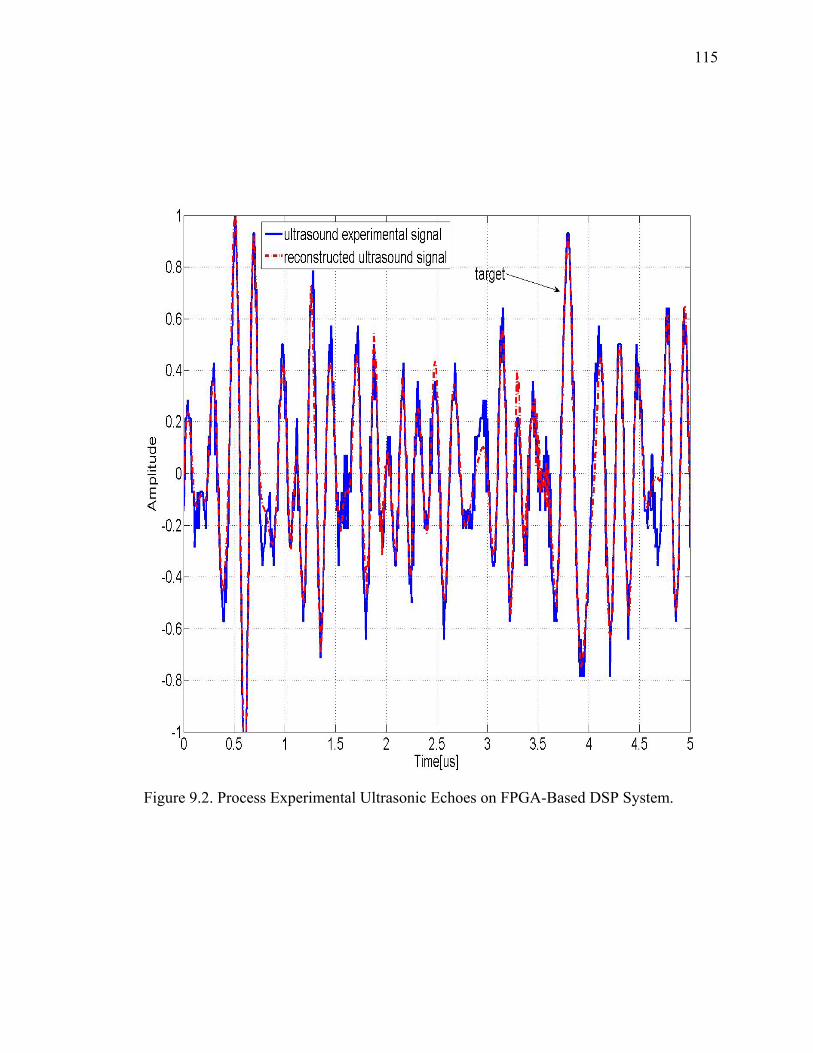
115
Figure 9.2. Process Experimental Ultrasonic Echoes on FPGA-Based DSP System.
116
CHAPTER 10
CONCLUSION AND FUTURE WORK
In ultrasonic applications, the patterns of detected echoes correspond to the shape,
size and orientation of the reflectors and the physical properties of the propagation path.
However, these echoes are often overlapped due to closely spaced reflectors and/or
microstructure scattering. Therefore, signal model and parameter estimation is critical for
these applications. In this research, we have developed chirplet signal decomposition
algorithms for signal analysis. Two different implementation strategies of decomposition
have been discussed. One is based on chirplet transform. Another one is based on the
matching pursuit framework. We developed the decomposition algorithms and
demonstrated them in different ultrasonic applications such as ultrasonic target detection,
bat chirp signal evaluation, grain size estimation, and backscattered reverberant analysis.
The chirplet signal decomposition algorithm aims to decompose the signal to be
processed into a linear combination of chirplets. In the signal decomposition algorithm
based on chirplet transform (CTSD) algorithm, from the point view of time frequency
resolution, the chirplet transform has similar resolution advantage as wavelet transform
does. The chirplet transform is used not only used as a mean for time frequency
representation, but also to estimate the echo parameters including the amplitude, time of
arrival, center frequency, bandwidth factor, phase, and chirp rate. Once these parameters
are estimated, one can achieve a quantitative representation leading to the identification
of echoes and physical property analysis of specimen. The successive parameter
estimation algorithm coupled with windowing strategy in time frequency representation
domain showed robustness in chirp signal decomposition, compared with the Gabor
117
decomposition algorithm [Car05b]. This comparison revealed one important fact about
the CTSD algorithm, that is, it uses fewer components to reconstruct the chirp type signal
and the parameters reveal the chirp nature of original signals.
Another algorithm is matching pursuit signal decomposition (MPSD) algorithm.
We incorporated statistical signal processing methods such as Maximum Likelihood
Estimation (MLE) and Maximum a Posteriori (MAP) into matching pursuit framework.
The signal analysis results show that, if proper prior information is offered, MPSD-MAP
can be more matched to the local physical properties of signals than MPSD-MLE. In both
implementations of the MPSD algorithm, the parameters of chirplet are adaptively
optimized to best match the signal residues. It avoids the exhaustive search of a large
number of dictionary function and leads to a more efficient implementation.
Furthermore, in order to determine the effect of noise level in parameter
estimation, we derived the analytical Cramer Rao Lower Bounds (CRLB) for chirplet
signal decomposition. The CRLB provides the bounds on the variance of parameter
estimators. Through Monte Carlo simulation, we demonstrated that the chirplet parameter
estimation of both algorithms is unbiased with minimum variance, i.e., it attains
analytical derived CRLB bounds. When applied to simulated ultrasonic signals, both
algorithms perform robustly, yield accurate echo estimations and result in considerable
SNR enhancements. Moreover, the MPSD algorithm outperforms the CTSD in moderate
noise levels whereas the CTSD performs better than MPSD in severe noise levels. This
can be explained by the different nature of algorithms. First, the processing domain is
different. The CTSD algorithm is to process signal and estimate the parameters in time
frequency domain whereas the MPSD algorithm performs only in time domain. Hence,

118
the noise is better suppressed in CTSD algorithm than it is in MPSD algorithm. Secondly,
the iterative optimization of MPSD algorithm may become more dependent on the initial
guess in severe noise levels.
One immediate application of the chirplet signal decomposition algorithm is
ultrasonic target detection. The CTSD algorithm has been evaluated using an ultrasonic
experimental backscattered signal consisting of many interfering echoes to detect a target
embedded in it. The reconstructed signal and time frequency representation showed that
the target echo was successfully detected and the parameters can be used to further
evaluate and analyze the physical properties.
We studied the performance of our algorithm in an experimental bat chirp echoes,
which is emitted by a large brown bat and used as the benchmark signal in literatures for
time frequency analysis. The time frequency representation shows that the bat chirp
signal is highly overlapped in both time and frequency domain, which add the difficulties
in the signal analysis. The bat chirp signal has poor SNR and contains heavily
overlapping chirp components. The chirplet signal decomposition not only successful
analyzes the contents of bat echoes as the other literatures did, but offer the details of
parameters for better scientific analysis of the species.
Another application of our algorithms is grain size estimation, which is critical to
determine the mechanical properties of materials. We reviewed a model for the ultrasonic
grain backscattered signal and discussed the effect of frequency dependent scattering and
attenuation. By estimating the expected frequency, our algorithm verified the spectral
shift trend in different specimens which were processed under different heat treatment

119
and have different grain size. Our algorithm exhibits a new angle to extract the mean
grain size information from ultrasonic backscattering echoes.
One can also use the chirp signal decomposition algorithms in the classification of
ultrasonic multilayered reverberant echoes. An echo classification model of multilayered
structure has been developed to reveal the physical nature of reverberant. Our algorithm
has been utilized to successfully classify different type of echoes in ultrasonic
experimental reverberant signal and estimate the physical parameters of multilayered
structure.
Furthermore, an embedded FPGA-based DSP system is successfully designed to
verify the feasibility of hardware implementation and acceleration for the CTSD
algorithm.
Overall, it has been shown through computer simulation and analysis of
experimental data that the chirplet decomposition algorithms can efficiently decompose
the nonstationary signal and estimate the parameters of the chirplets. The estimated
parameters have been successfully used to locate the target echo in ultrasonic
backscattered signal, evaluate grain size of material, and classify ultrasonic multilayered
reverberant echoes. This type of study addresses a broad range of applications such as
target detection, data compression, deconvlution, object classification, velocity
measurement, and material characterization.

120
BIBLIOGRAPHY
[Adl96] Adler, J., B. Rao, and K. Delgado. “Comparison of Basis Selection Methods.” Proceeding of IEEE Asilomar Conference on Signals, Systems, and Computer Frequency and Time Scale Analysis. Pacific Grove, CA (November 1996):252-257. [And87] Adnrieux, J., M. Feix, G. Mourgues, P. Bertrand, B. Izrar, and V. Nguyen.
“Optimum Smoothing of the Wigner Ville Distribution.” IEEE Transactions on Acoustics, Speech, and Signal Processing. 35.6(June 1987):764-769.
[Ant92] Antonini, M., M. Barlaud, P. Mathieu, and I. Daubechies. “Image Coding Using Wavelet Transform.” IEEE Transaction on Image Processing.1.2 (April 1992): 205-220. [Boa03] Boashash, B., Time Frequency Analysis. Massachusetts: Elsevier Science, 2003. [Bul98] Bultan, A., and O. Arikan. “ A Parallelized Matching Pursuit Algorithm for the Four Parameter Chirplet Decomposition.” IEEE International Symposium on Time Frequency and Time Scale Analysis. 1.1(October 1998):421-424. [Cap03] Capus, C., and K. Brown. “Short Time Fractional Fourier Methods for the Time Frequency Representation of Chirp Signals.” Journal of the Acoustical Society of America.113.6 (June 2003): 3253-3263. [Car05a] Cardoso, G., and J. Saniie. “Ultrasonic Data Compression via Parameter Estimation.” IEEE Transaction on Ultrasonics, Ferroelectrics and Frequency Control.52.2 (February 2005): 313-325. [Car05b] Cardoso, G., Compression, Estimation, and Analysis of Ultrasonic Signals.
Chicago: Illinois Institute of Technology May 2005.
[Cha06] Chaux, C., L. Duval, and J. Pesquet. “ Image Analysis Using a Dual Tree M Band Wavelet Tranform.” IEEE Transaction on Image Processing.15.8 (August 2006): 2397-2412.
[Che98] Chen, S., D. Donoho, and M. Saunders. “Atomic Decomposition by Basis Pursuit.” SIAM Journal on Scientific Computing.20.1 (August 1998):33-61. [Cla80] Classen, T., and W. Mechlenbrauker. “The Wigner Distribution – a Toll for Time Frequency Signal Analysis.” Philips J. Res.35 (1980): 217-250.

121
[Coh89] Cohen, L. “Time Frequency Distributions – a Review.” Proceeding of IEEE.77.7 (July 1989): 941-981. [Cot98] Cotter, S., M. Murthi, and B. Rao. “Fast Basic Selection Methods.” Proceeding of IEEE Asilomar Conference on Signals, Systems, and Computer Frequency and Time Scale Analysis. Pacific Grove, CA (November 1997):1474-1478. [Cui06] Cui, J., and W. Wong. “The Adaptive Chirplet Transform and Visual Evoked Potentials.” IEEE Transaction on Biomedical Engineering.53.7 (July 2006): 1378-1384. [Dau90] Daubechies, I. “The Wavelet Transform, Time Frequency Localization and
Signal Analysis.” IEEE Transaction on Information Theory.36.5 (September 1990):961-1005.
[Dau03] Daubechies, I., Ten Lectures on Wavelets. Philadelphia: Society for Industrial
and Applied Mathematics, June 1992. [Dem00] Demirli, R., and J. Saniie. “Model Based Time Frequency Estimation of Ultrasonic Echoes for NDE Applications.” IEEE Ultrasonics, Ferroelectrics and Frequency Control Symposium.1.1 (October 2000): 785-788. [Dem01a] Demirli, R., and J. Saniie. “Model Based Estimation of Ultrasonic Echoes. Part I: Analysis and Algorithms.” IEEE Transaction on Ultrasonics, Ferroelectrics and FrequencyControl.48.3 (May 2001): 787-802. [Dem01b] Demirli, R., and J. Saniie. “Model Based Estimation of Ultrasonic Echoes. Part II: Nondestructive Evaluation Applications.” IEEE Transaction on Ultrasonics, Ferroelectrics and FrequencyControl.48.3 (May 2001):
803-811.
[Dju90] Djuric, P., and S. Kay. “Parameter Estimation of Chirp Signals.” IEEE Transaction on Acoustics, Speech and Signal Processing.38.12 (December 1990): 2118-2126. [Don06] Donnelly, D.“The Fast Fourier Transform for Experimentalists. Part VI. Chirp of a Bat.” Computing in Science and Enigeering.8.2 (March 2006): 72-78. [Fan02] Fan, W., H. Zou, Y. Sun, Z. Li, and R. Shi. “Decomposition of Seismic Signal via Chirplet Transform.” Proceeding of IEEE 6th International Conference on Signal Processing, Beijing, China (August 2002): 1778-1782. [Fen01] Feng, A., X. Wu, and Q. Yin. “Fast Algorithm of Adaptive Chirplet Based Real Signal Decomposition.” IEEE International Symposium on Circuits and Systems.2.1 (March 2001): 6-9.
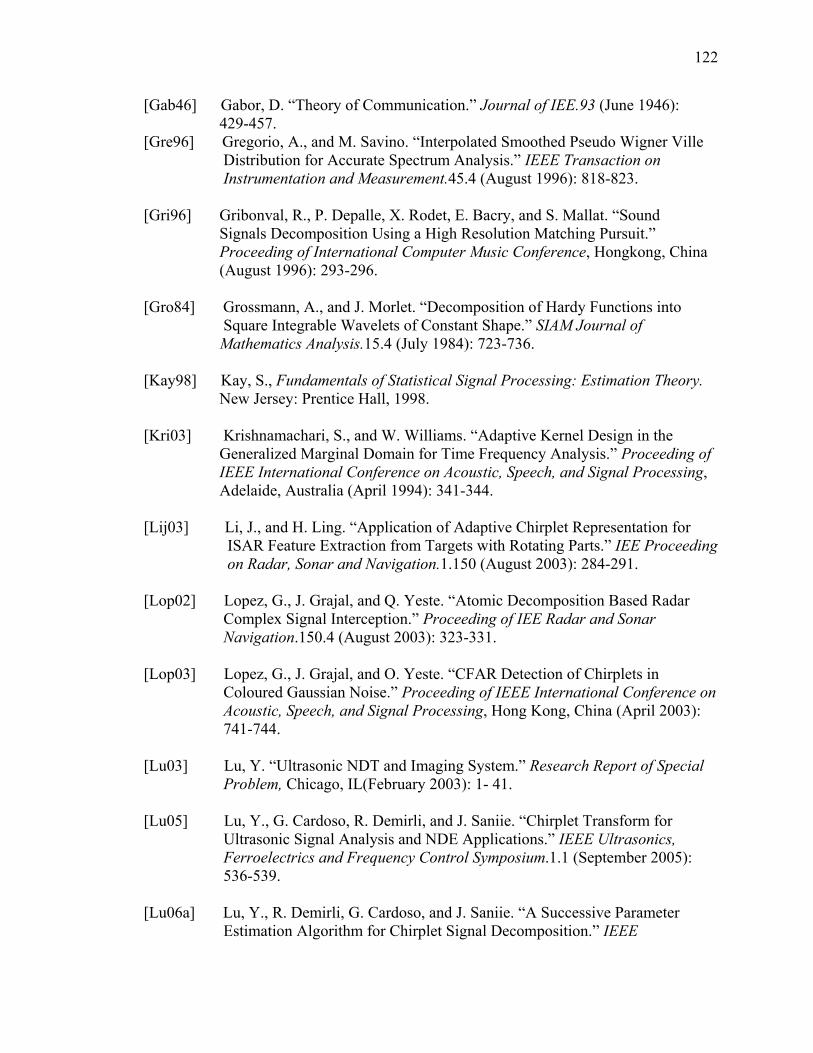
122
[Gab46] Gabor, D. “Theory of Communication.” Journal of IEE.93 (June 1946): 429-457. [Gre96] Gregorio, A., and M. Savino. “Interpolated Smoothed Pseudo Wigner Ville Distribution for Accurate Spectrum Analysis.” IEEE Transaction on Instrumentation and Measurement.45.4 (August 1996): 818-823. [Gri96] Gribonval, R., P. Depalle, X. Rodet, E. Bacry, and S. Mallat. “Sound Signals Decomposition Using a High Resolution Matching Pursuit.” Proceeding of International Computer Music Conference, Hongkong, China (August 1996): 293-296. [Gro84] Grossmann, A., and J. Morlet. “Decomposition of Hardy Functions into Square Integrable Wavelets of Constant Shape.” SIAM Journal of Mathematics Analysis.15.4 (July 1984): 723-736. [Kay98] Kay, S., Fundamentals of Statistical Signal Processing: Estimation Theory.
New Jersey: Prentice Hall, 1998. [Kri03] Krishnamachari, S., and W. Williams. “Adaptive Kernel Design in the Generalized Marginal Domain for Time Frequency Analysis.” Proceeding of IEEE International Conference on Acoustic, Speech, and Signal Processing, Adelaide, Australia (April 1994): 341-344. [Lij03] Li, J., and H. Ling. “Application of Adaptive Chirplet Representation for ISAR Feature Extraction from Targets with Rotating Parts.” IEE Proceeding on Radar, Sonar and Navigation.1.150 (August 2003): 284-291. [Lop02] Lopez, G., J. Grajal, and Q. Yeste. “Atomic Decomposition Based Radar Complex Signal Interception.” Proceeding of IEE Radar and Sonar Navigation.150.4 (August 2003): 323-331. [Lop03] Lopez, G., J. Grajal, and O. Yeste. “CFAR Detection of Chirplets in Coloured Gaussian Noise.” Proceeding of IEEE International Conference on Acoustic, Speech, and Signal Processing, Hong Kong, China (April 2003): 741-744. [Lu03] Lu, Y. “Ultrasonic NDT and Imaging System.” Research Report of Special Problem, Chicago, IL(February 2003): 1- 41. [Lu05] Lu, Y., G. Cardoso, R. Demirli, and J. Saniie. “Chirplet Transform for Ultrasonic Signal Analysis and NDE Applications.” IEEE Ultrasonics, Ferroelectrics and Frequency Control Symposium.1.1 (September 2005):
536-539. [Lu06a] Lu, Y., R. Demirli, G. Cardoso, and J. Saniie. “A Successive Parameter Estimation Algorithm for Chirplet Signal Decomposition.” IEEE

123
Transaction on Ultrasonics, Ferroelectrics and Frequency Control.53.11 (November 2006): 2121-2131. [Lu06b] Lu, Y., R. Demirli, and J. Saniie. “A Comparative Study of Echo Estimation Techniques for Ultrasonic NDE Applications.” IEEE Ultrasonics, Ferroelectrics and Frequency Control Symposium.1.1 (October 2006). [Lu07] Lu, Y., R. Demirli, E. Oruklu, and J. Saniie. “Estimation and Classification of Ultrasonic Echoes Backscattered from Reverberant Multilayered Materials.” International Congress on Ultrasound. (April 2007). [Mal89] Mallat, S. “A Theory for Multiresolution Signal Decomposition: the Wavelet Representation.” IEEE Transactions on Pattern Analysis and Machine Intelligence.11.7(July 1989): 674-693. [Mal91] Mallat, S. “Zero-Crossings of a Wavelet Transform.” IEEE Transaction on Information Theory.37.4 (July 1991):1019-1033. [Mal93] Mallat, S., and Z. Zhang. “Matching Pursuits with Time Frequency Dictionaries.” IEEE Transactions on Signal Processing. 41.12(December 1993):3397-3415. [Mal99] Mallat, S, A Wavelet Tour of Signal Processing. California: Academic Press, 1999. [Ma98] Ma, N., and D. Vray. “Bottom Backscattering Coefficient Estimation from Wideband Chirp Sonar Echoes by Chirp Adapted Time Frequency Representation.” Proceeding of IEEE International Conference on Acoustic, Speech, and Signal Processing, Seattle, WA (May 1998): 12-15. [Man92] Mann, S., and S. Haykin. “Time Frequency Perspectives: the Chirplet Transform.” Proceeding of IEEE International Conference on Acoustic, Speech, and Signal Processing, San Francisco, CA (March 1992): 417-420. [Man95] Mann, S., and S. Haykin. “The Chirplet Transform: Physical Considerations.” IEEE Transaction on Signal Processing.43.11 (November 1995): 2745-2761. [Men98] Mencer, O., M. Morf, and J. Delosme. “Application of Reconfigurable CORDIC Architectures.” Proceeding of IEEE Asilomar Conference on Signals, Systems, and Computer, Monterey , CA (June 1998):182-186. [Mey93] Meyer, Y., and R. Ryan. Waveletes: Algorithms and Applications. Massachusetts: Society for Industrial and Applied Mathematic, May 1993. [Nei99] Neill, J., and J. Williams. “A Function of Time, Frequency, Lag and Doppler.” IEEE Transaction on Signal Processing.47.3 (March 1999):

124
789-799. [Oeh97] Oehlmann, H., and D. Bric. “The Reduced Interference Local Wigner Ville
Distribution.” Proceeding of IEEE International Conference on Acoustics, Speech and Signal Processing, Munich, Germany (April 1997): 3645-3648.
[Qia92] Qian, S., D. Chen, and K. Chen. “Signal Approximation Via Data Adaptive
Normalized Gaussian Functions and Its Applications for Speech Processing.” IEEE International Conference on Acoustics, Speech, and Signal Processing, San Francisco, CA (Augest1992):141-144.
[Qia94] Qian, S., and D. Chen. “Signal Representation Using Adaptive Normalized Gaussian Functions.” IEE Transaction on Signal Processing.36.1 (March 1994):1-11. [Qia98] Qian, S., D. Chen, and Q. Yin. “Adaptive Chirplet Based Signal Approximation.” Proceeding of IEEE International Conference on Acoustic, Speech, and Signal Processing, Seattle, WA (May 1998): 1781-1784. [Rab93] Rabiner, L., Fundamentals of Speech Recognition. New Jersey: Prentice Hall, April 1993. [Rod98] Rodenas, J., and R. Garello. “Internal Wave Detection and Location in SAR
Images Using Wavelet Transform.” IEEE Transaction on Geosciences and Remote Sensing.36.5 (September 1998): 1494-1507.
[San81] Saniie, J. Ultrasonic Signal Processing: System Identification and Parameter Estimation of Reverberant and Inhomogeneous Targets. West Lafayette: Purdue University August 1981. [San82] Saniie, J., E. Furgason, and V. Newhouse. “Ultrasonic Imaging Through Highly Reverberant Thin Layers - Theoretical Considerations.” Material Evaluation.40 (January 1982):115-121.
[San89] Saniie, J. and D. Nagle. “Pattern Recognition in the Ultrasonic Imaging of Reverberant Multilayered Structures.” IEEE Transaction on Ultrasonics, Ferroelectrics, and Frequency Control.36.1 (January 1989): 80-92. [San94] Saniie, J. and M. Mohamed. “Ultrasonic Flaw Detection Based on Mathematical Morphology.” IEEE Transaction on Ultrasonics, Ferroelectrics, and Frequency Control.41.1 (January 1994): 150-160. [Sek99] Sekhar, B., and K. Prabhu. “Radix-2 Decimation In Frequency Algorithm for the Computation of the Real Valued FFT.” IEEE Transaction on Signal Processing.47.1 (April 1999): 1181-1184.
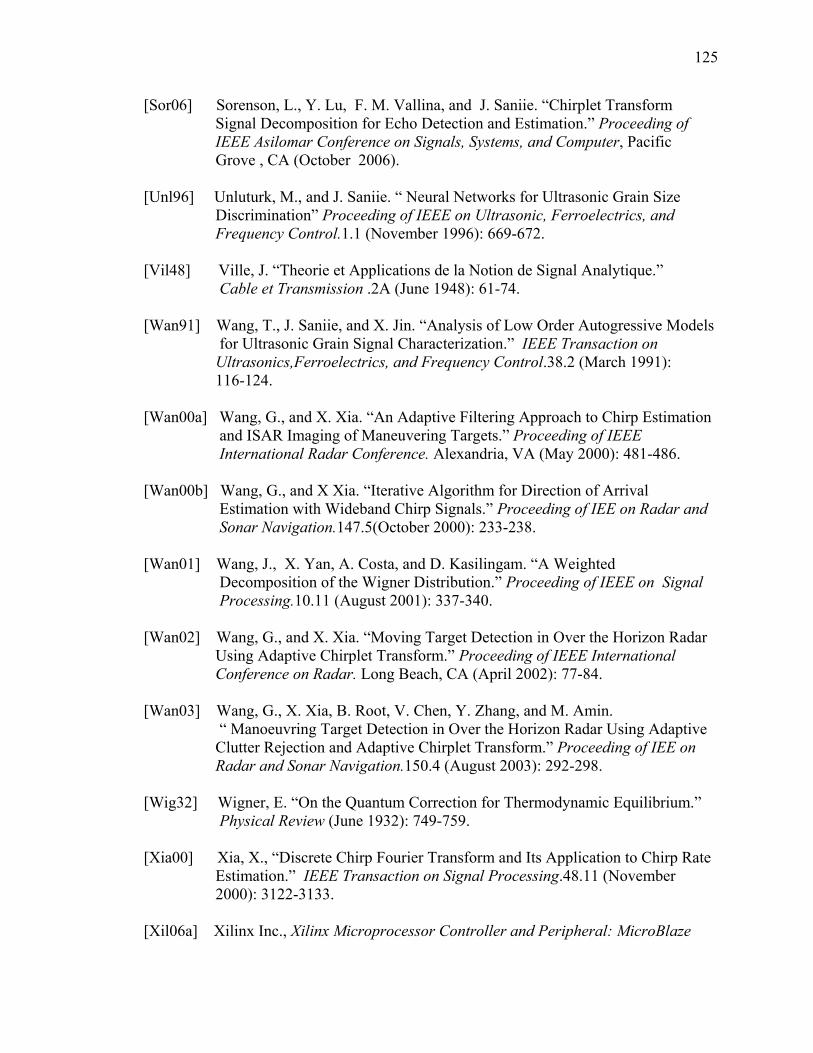
125
[Sor06] Sorenson, L., Y. Lu, F. M. Vallina, and J. Saniie. “Chirplet Transform Signal Decomposition for Echo Detection and Estimation.” Proceeding of IEEE Asilomar Conference on Signals, Systems, and Computer, Pacific Grove , CA (October 2006). [Unl96] Unluturk, M., and J. Saniie. “ Neural Networks for Ultrasonic Grain Size Discrimination” Proceeding of IEEE on Ultrasonic, Ferroelectrics, and Frequency Control.1.1 (November 1996): 669-672. [Vil48] Ville, J. “Theorie et Applications de la Notion de Signal Analytique.”
Cable et Transmission .2A (June 1948): 61-74.
[Wan91] Wang, T., J. Saniie, and X. Jin. “Analysis of Low Order Autogressive Models for Ultrasonic Grain Signal Characterization.” IEEE Transaction on Ultrasonics,Ferroelectrics, and Frequency Control.38.2 (March 1991): 116-124.
[Wan00a] Wang, G., and X. Xia. “An Adaptive Filtering Approach to Chirp Estimation and ISAR Imaging of Maneuvering Targets.” Proceeding of IEEE International Radar Conference. Alexandria, VA (May 2000): 481-486. [Wan00b] Wang, G., and X Xia. “Iterative Algorithm for Direction of Arrival Estimation with Wideband Chirp Signals.” Proceeding of IEE on Radar and Sonar Navigation.147.5(October 2000): 233-238. [Wan01] Wang, J., X. Yan, A. Costa, and D. Kasilingam. “A Weighted Decomposition of the Wigner Distribution.” Proceeding of IEEE on Signal Processing.10.11 (August 2001): 337-340. [Wan02] Wang, G., and X. Xia. “Moving Target Detection in Over the Horizon Radar Using Adaptive Chirplet Transform.” Proceeding of IEEE International Conference on Radar. Long Beach, CA (April 2002): 77-84. [Wan03] Wang, G., X. Xia, B. Root, V. Chen, Y. Zhang, and M. Amin.
“ Manoeuvring Target Detection in Over the Horizon Radar Using Adaptive Clutter Rejection and Adaptive Chirplet Transform.” Proceeding of IEE on Radar and Sonar Navigation.150.4 (August 2003): 292-298.
[Wig32] Wigner, E. “On the Quantum Correction for Thermodynamic Equilibrium.”
Physical Review (June 1932): 749-759. [Xia00] Xia, X., “Discrete Chirp Fourier Transform and Its Application to Chirp Rate Estimation.” IEEE Transaction on Signal Processing.48.11 (November 2000): 3122-3133. [Xil06a] Xilinx Inc., Xilinx Microprocessor Controller and Peripheral: MicroBlaze

126
Soft Processor Core. Xilinx, 2006 [Xil06b] Xilinx Inc., Fast Simplex Link (FSL) Bus (v2.00a). Xilinx, 2006
[Yin02] Yin, Q., S. Qian, and A. Feng. “A Fast Refinement for Adaptive Gaussian Chirplet Decomposition.” IEEE Transaction on Signal Processing.50.6 (June 2002):1298-1306.
[Zan03] Zhang, L., Y. Peng, and J. Xu. “A Chirp Signal Parameter Estimation Algorithm and its Application to SAR.” Proceeding of IEEE Conference on Radar.Huntsville, Alabama (May 2003): 228-231. [Zen01] Zeng, Z., and I. Cumming. “SAR Image Data Compression Using a Tree
Structured Wavelet Transform.” IEEE Transaction on Geosciences and Remote Sensing.39.3 (March 2001): 546-552.







