
On the topology of matrix configuration spaces
Daniel C. Cohen
Department of MathematicsLouisiana State University
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 1

Configuration spaces
M topological space (e.g., a manifold, a graph. . . ) Mn = M × · · · ×M
F (M,n) = {(x1, . . . , xn) ∈ Mn : xi 6= xj if i 6= j}the configuration space of n distinct ordered points in M
symmetric group Σn acts freely on F (M,n)
F (M,n)/Σn the configuration space of unordered points in M
ExampleM = C
F (C,n)/Σn is a K (G,1)-space for G = Bn the Artin full braid group
F (C,n) is a K (G,1)-space for G = Pn the Artin pure braid group
1→ Pn → Bn → Σn → 1
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 2

Generalize. . .
X (n,1) = F (C,n) = {(x1, . . . , xn) ∈ Cn : xi 6= xj if i 6= j}space of n-tuples of points in C no two equal
X (n,2) space of n-tuples of points in C2 no three colinear
(xi , yi), (xj , yj), (xk , yk ) colinear ⇐⇒
∣∣∣∣∣∣1 1 1xi xj xkyi yj yk
∣∣∣∣∣∣ = 0
X (n,2) =
1 1 · · · 1
x1 x2 · · · xny1 y2 · · · yn
:xi , yj ∈ C
all 3× 3 minors nonzero
Note:
X (n,1) = F (C,n) =
{[1 1 · · · 1x1 x2 · · · xn
]:
xi ∈ Call 2× 2 minors nonzero
}Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 3

Matrix configuration space
X (n, k) =
1 . . . 1x1,1 · · · x1,n
......
xk ,1 · · · xk ,n
:xi,j ∈ C
all (k + 1)× (k + 1) minors nonzero
X (n, k) space of n-tuples of points in Ck
no k + 1 of which lie on an affine (k − 1)-plane
related space:
G(n, k) =
x1,1 · · · x1,n
......
xk ,1 · · · xk ,n
:xi,j ∈ C
all k × k minors nonzero
G(n, k)/Σn is the generic stratum in the matroid “stratification” of theGrassmannian due to Gelfand-Goresky-MacPherson-Serganova
topology of such spaces?Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 4
Some observations
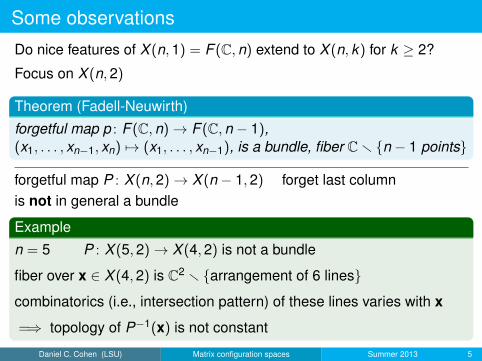
Do nice features of X (n,1) = F (C,n) extend to X (n, k) for k ≥ 2?
Focus on X (n,2)
Theorem (Fadell-Neuwirth)
forgetful map p : F (C,n)→ F (C,n − 1),(x1, . . . , xn−1, xn) 7→ (x1, . . . , xn−1), is a bundle, fiber Cr {n − 1 points}
forgetful map P : X (n,2)→ X (n − 1,2) forget last columnis not in general a bundle
Example
n = 5 P : X (5,2)→ X (4,2) is not a bundle
fiber over x ∈ X (4,2) is C2 r {arrangement of 6 lines}
combinatorics (i.e., intersection pattern) of these lines varies with x
=⇒ topology of P−1(x) is not constant
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 5

not bundle
fibers over x =
1 1 1 10 1 0 10 0 1 1
and y =
1 1 1 10 1 0 20 0 1 1
in X (4,2)
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 6

cohomology
cohomology with C coefficients throughout H∗(X ) = H∗(X ;C)
Theorem (Arnol’d, Cohen)
H∗(X (n,1)) = H∗(F (C,n)) is generated in degree one by
ωi,j =d(xi−xj )
xi−xj1 ≤ i < j ≤ n
relations: ωi,jωi,k − ωi,jωj,k + ωi,kωj,k = 0 1 ≤ i < j < k ≤ nand their consequences
H∗(X (n,2)) is not generated in degree one
the map X (n,2)→ GL2(C),
1 1 · · · 1x1 x2 · · · xny1 y2 · · · yn
7→ [x2 − x1 x3 − x1y2 − y1 y3 − y1
]induces a monomorphism H∗(GL2(C)) ↪→ H∗(X (n,2)) in cohomology
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 7

higher homotopy
Theorem (Fadell-Neuwirth)
X (n,1) = F (C,n) is a K (G,1)-spaceπk (F (C,n)) = 0 for k ≥ 2
X (n,2) is not a K (G,1)-space
X (n,2) ' GL2(C)× Y (n,2)
Y (n,2) =
1 1 1 1 · · · 1
0 1 0 x4 · · · xn0 0 1 y4 · · · yn
:xi , yj ∈ C
all 3× 3 minors nonzero
Y (n,2) is not a K (G,1)-space either
Example
n = 4 Y (4,2) = {(x , y) ∈ C2 : xy(1− x − y) 6= 0}
[Hattori] Y (4,2) ' S1×S1×S1 r {point} =⇒ π2(Y (4,2)) nontrivial
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 8

“section”
Theorem (Fadell-Neuwirth)
bundle p : F (C,n)→ F (C,n − 1) admits a section∃ s : F (C,n − 1)→ F (C,n) with p ◦ s = id|F (C,n−1)
there is a map S : X (n − 1,2)→ X (n,2) with P ◦ S = id|X(n−1,2)
consequence: π2(Y (n,2)) is nontrivial for all n ≥ 4
idea: x ∈ X (n − 1,2)←→ collection of lines in C2
produce new line in C2 in general position with respect to these
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 9

TC(X (n,2))
X topological space PX space of all continuous paths γ : [0,1]→ X
π : PX → X × X , γ 7→ (γ(0), γ(1)), is a fibration
Farber (2003) – topological approach to the motion planning problemfrom robotics: The topological complexity of X is the Schwarz genus,or sectional category, of the fibration π : PX → X × X
TC(X ) = genus(π : PX → X × X )
TC(X ): smallest integer k for which X × X has an open cover with kelements, over each of which π : PX → X ×X has a continuous section
X × X = U1 ∪ · · · ∪ Uk si : Ui → PX continuous π ◦ si = id|Ui
Theorem
TC(X (n,2)) =
3 if n = 36 if n = 44n − 9 if n ≥ 5
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 10

The motion planning problem
A motion planning algorithm for a mechanical system is a rule whichassigns to a pair of states (A,B) of the system a continuous motion ofthe system starting at A and ending at B
X the configuration space of the system
PX the space of all continuous paths γ : [0,1]→ X as before
A motion planning algorithm is a section s : X × X → PX of the pathspace fibration π : PX → X × X
(not necessarily continuous)
Proposition∃ a globally continuous section s : X × X → PX of π : PX → X × X
⇐⇒ X is contractible
that is, TC(X ) = 1 ⇐⇒ X is contractible
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 11
Solving the motion planning problem
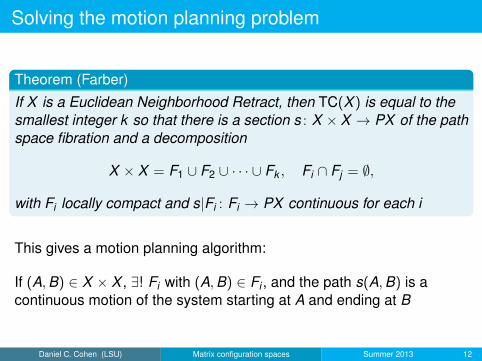
Theorem (Farber)
If X is a Euclidean Neighborhood Retract, then TC(X ) is equal to thesmallest integer k so that there is a section s : X × X → PX of the pathspace fibration and a decomposition
X × X = F1 ∪ F2 ∪ · · · ∪ Fk , Fi ∩ Fj = ∅,
with Fi locally compact and s|Fi : Fi → PX continuous for each i
This gives a motion planning algorithm:
If (A,B) ∈ X × X , ∃! Fi with (A,B) ∈ Fi , and the path s(A,B) is acontinuous motion of the system starting at A and ending at B
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 12

Spheres
Example (X = S1)
F1 = {(x ,−x) | x ∈ X} ⊂ X × X F2 = X × X r F1
s|F1 : F1 → PX counterclockwise path from x to −xs|F2 : F2 → PX shortest geodesic arc from x to y
TC(S1) = 2
Example (X = S2)fix e ∈ X , ν a nowhere zero tangent vector field on X r eF1 = {(e,−e)} F2 = {(x ,−x) | x 6= e} F3 = {(x , y) | x 6= −y}s|F1 : F1 → PX any fixed path from e to −es|F2 : F2 → PX path x to −x along semicircle tangent to ν(x)
s|F3 : F3 → PX shortest geodesic arc from x to yTC(S2) ≤ 3
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 13
TC properties (Farber)
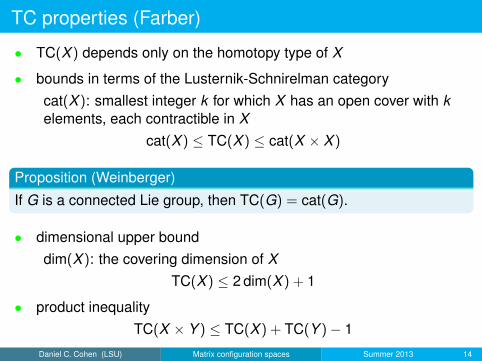
• TC(X ) depends only on the homotopy type of X
• bounds in terms of the Lusternik-Schnirelman categorycat(X ): smallest integer k for which X has an open cover with kelements, each contractible in X
cat(X ) ≤ TC(X ) ≤ cat(X × X )
Proposition (Weinberger)
If G is a connected Lie group, then TC(G) = cat(G).
• dimensional upper bounddim(X ): the covering dimension of X
TC(X ) ≤ 2 dim(X ) + 1
• product inequalityTC(X × Y ) ≤ TC(X ) + TC(Y )− 1
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 14
more TC properties
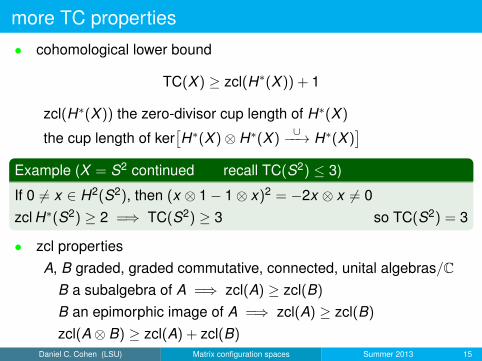
• cohomological lower bound
TC(X ) ≥ zcl(H∗(X )) + 1
zcl(H∗(X )) the zero-divisor cup length of H∗(X )
the cup length of ker[H∗(X )⊗ H∗(X )
∪−−→ H∗(X )]
Example (X = S2 continued recall TC(S2) ≤ 3)
If 0 6= x ∈ H2(S2), then (x ⊗ 1− 1⊗ x)2 = −2x ⊗ x 6= 0zcl H∗(S2) ≥ 2 =⇒ TC(S2) ≥ 3 so TC(S2) = 3
• zcl propertiesA, B graded, graded commutative, connected, unital algebras/C
B a subalgebra of A =⇒ zcl(A) ≥ zcl(B)
B an epimorphic image of A =⇒ zcl(A) ≥ zcl(B)
zcl(A⊗ B) ≥ zcl(A) + zcl(B)Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 15

Toric complexes
T = T n = S1 × · · · × S1 = {z = (z1, . . . , zn) ∈ Cn : |zi | = 1} n-torus
equipped with the standard minimal CW-decomposition
k -dim’l cell CK ←→ subset K of [n] = {1,2, . . . ,n} of cardinality k
for K ⊆ [n] CK = {z ∈ T : zi = 1 if i /∈ K , zi 6= 1 if i ∈ K}
let TK = {z ∈ T : zi = 1 if i /∈ K} TK∼= T |K | |K |-torus
X ⊂ T n a subcomplex
z(X ) = max{|J|+ |K | : J ∩ K = ∅ and TJ ∨ TK is a subcomplex of X}
Theorem (C-Pruidze)
TC(X ) = z(X ) + 1
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 16
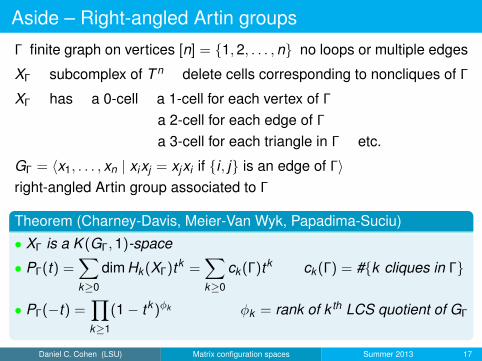
Aside – Right-angled Artin groups
Γ finite graph on vertices [n] = {1,2, . . . ,n} no loops or multiple edges
XΓ subcomplex of T n delete cells corresponding to noncliques of Γ
XΓ has a 0-cell a 1-cell for each vertex of Γ
a 2-cell for each edge of Γ
a 3-cell for each triangle in Γ etc.
GΓ = 〈x1, . . . , xn | xixj = xjxi if {i , j} is an edge of Γ〉right-angled Artin group associated to Γ
Theorem (Charney-Davis, Meier-Van Wyk, Papadima-Suciu)
• XΓ is a K (GΓ,1)-space
• PΓ(t) =∑k≥0
dim Hk (XΓ)tk =∑k≥0
ck (Γ)tk ck (Γ) = #{k cliques in Γ}
• PΓ(−t) =∏k≥1
(1− tk )φk φk = rank of k th LCS quotient of GΓ
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 17
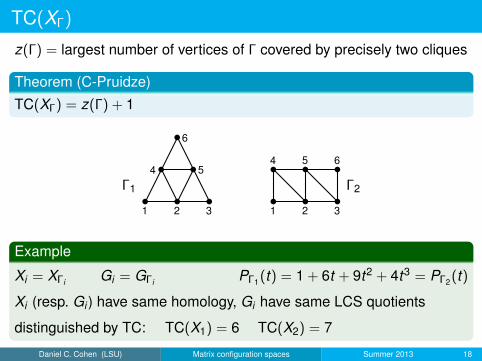
TC(XΓ)
z(Γ) = largest number of vertices of Γ covered by precisely two cliques
Theorem (C-Pruidze)
TC(XΓ) = z(Γ) + 1
• • •
•
• •
• • •
• • •Γ1 Γ2
1 2 3 1 2 3
4 5 64 5
6
Example
Xi = XΓi Gi = GΓi PΓ1(t) = 1 + 6t + 9t2 + 4t3 = PΓ2(t)
Xi (resp. Gi ) have same homology, Gi have same LCS quotients
distinguished by TC: TC(X1) = 6 TC(X2) = 7
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 18
TC of right-angled Artin groups
G a discrete groupcat(G) := cat(X ) TC(G) := TC(X ) where X is a K (G,1)-space
Theorem (Eilenberg-Ganea)
cat(G) = 1 + geometric dimension of G (for most G)
Example
G = GΓ a right-angled Artin group TC(GΓ) = TC(XΓ) = z(Γ) + 1for instance TC(Zn) = n + 1 TC(Fn) = 3 (for n ≥ 2)Γ = Γ1 q Γ2 (disjoint ∪) =⇒ TC(GΓ) = TC(GΓ1 ∗GΓ2) = TC(XΓ1 ∨ XΓ2)
Theorem (Rudyak)For each natural number k and each natural number ` with k ≤ ` ≤ 2k,there is a discrete group G with cat(G) = k + 1 and TC(G) = `+ 1
can take G = Zk ∗ Z`−k in the theoremDaniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 19
Hattori theorem
G = {H1,H2, . . . ,Hn} n hyperplanes in general position in C` (n ≥ `)
XG = C` r⋃n
i=1 Hi the complement
Example
` = 1 XG = Cr {n points} '∨
n S1
` = n XG = (C∗)n ' T n
` = 2 G = {{x = 0}, {y = 0}, {x + y = 1}} XG = Y (4,2)
Theorem (Hattori)
XG ' T n` the `-dimensional skeleton of T n
=⇒ π`(XG) nontrivial if n > `
Theorem (Yuzvinsky, C-Pruidze)
TC(XG) = min{n + 1,2`+ 1}
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 20

Hyperplane arrangements
A hyperplane arrangement is a finite collection of codimension 1 affinesubspaces in a complex vector space V
A = {H1, . . . ,Hn} Hi = {fi = 0} fi a linear polynomial
XA = V r⋃n
i=1 Hi the complement
ExampleG general position arrangement
A = {Hi,j 1 ≤ i < j ≤ n} in V = Cn Hi,j = {xi = xj} braid arrangement
XA = Cn r⋃
i<j Hi,j = {(x1, . . . , xn) ∈ Cn : xi 6= xj if i 6= j} = F (C,n)
Theorem (Brieskorn-Orlik-Solomon)
H∗(XA) ∼= E/I E exterior algebra generated by df1f1, . . . , dfn
fnI explicit two-sided ideal in E
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 21

TC of some arrangement complements
A is central if 0 ∈ Hi ∀ Hi ∈ A Hi = ker(fi) fi a linear form
{Hi1 , . . . ,Hik} ⊂ A independent ⇐⇒ {fi1 , . . . , fik} linearly independent
rank(A) = cardinality of a maximal independent set of hyperplanes in A
Theorem (Farber-Yuzvinsky)
A a central arrangement with rank(A) = r . If ∃ H1, . . . ,H2r−1 ∈ A with{H1, . . . ,Hr} independent and {Hj ,Hr+1, . . . ,H2r−1} independent foreach j, 1 ≤ j ≤ r , then zcl(H∗(XA)) = 2r − 1 and TC(XA) = 2r .
Theorem (Farber-Yuzvinsky)
TC(F (C,n)) = 2n − 2 TC(Pn) = 2n − 2 (Artin pure braid group)
Theorem (Farber-Grant-Yuzvinsky)
TC(F (Cr {m points},n)) =
{2n m = 12n + 1 m ≥ 2
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 22

back to TC(X (n,2))
Theorem
TC(X (n,2)) =
3 if n = 36 if n = 44n − 9 if n ≥ 5
X (n,2) ' GL2(C)× Y (n,2)
X (3,2) ' GL2(C)
X (4,2) ' GL2(C)× Y (4,2)
' GL2(C)× {(x , y) ∈ C2 : xy(1− x − y) 6= 0}' GL2(C)× T 3
2
' GL2(C)× (S1 × S1 × S1 r {point})
these cases covered by results discussed previouslyDaniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 23

TC(X (n,2))
X (n,2) ' GL2(C)× Y (n,2)
for n ≥ 5 enough to show that TC((Y (n,2)) = 4n − 11
Y (n,2) =
1 1 1 1 · · · 1
0 1 0 x4 · · · xn0 0 1 y4 · · · yn
:xi , yj ∈ C
all 3× 3 minors nonzero
' CW-complex of dimension 2(n − 3)
so need to see that TC(Y (n,2)) = 2 dim(Y (n,2)) + 1 = 4n − 11
TC(Y (n,2)) ≥ zcl(H∗(Y (n,2))) + 1
so if zcl(H∗(Y (n,2))) = 2 dim(Y (n,2)) = 4(n − 3)
then TC(Y (n,2)) = 2 dim(Y (n,2)) + 1 = 4n − 11
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 24
TC(X (n,2))
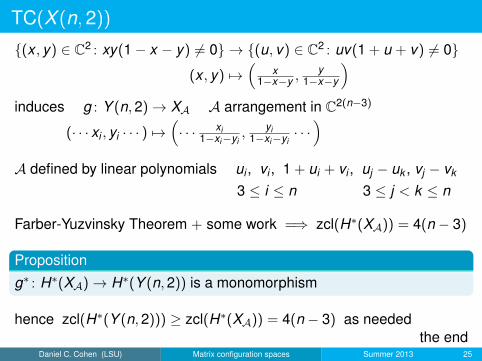
{(x , y) ∈ C2 : xy(1− x − y) 6= 0} → {(u, v) ∈ C2 : uv(1 + u + v) 6= 0}
(x , y) 7→(
x1−x−y ,
y1−x−y
)induces g : Y (n,2)→ XA A arrangement in C2(n−3)
(· · · xi , yi · · · ) 7→(· · · xi
1−xi−yi, yi
1−xi−yi· · ·)
A defined by linear polynomials ui , vi , 1 + ui + vi , uj − uk , vj − vk
3 ≤ i ≤ n 3 ≤ j < k ≤ n
Farber-Yuzvinsky Theorem + some work =⇒ zcl(H∗(XA)) = 4(n − 3)
Proposition
g∗ : H∗(XA)→ H∗(Y (n,2)) is a monomorphism
hence zcl(H∗(Y (n,2))) ≥ zcl(H∗(XA)) = 4(n − 3) as neededthe end
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 25

THANKS FOR LISTENING !
Daniel C. Cohen (LSU) Matrix configuration spaces Summer 2013 26







![WELCOME [] · Avishai Cohen - “An Evening with Avishai Cohen](https://cdn.vdocument.in/doc/165x107/5b3d956c7f8b9a560a8e0ae8/welcome-avishai-cohen-an-evening-with-avishai-cohen-.jpg)