Digital Control Systems
STATE FEEDBACK CONTROLLER DESIGN

Design via Pole Placement

Design via Pole Placement
Open loop control system

Design via Pole Placement
Closed loop system

Design via Pole Placement
Determination of feedback gain by using controllable canonical form

Design via Pole Placement
Determination of feedback gain by using controllable canonical form
1 1n n
Design via Pole Placement
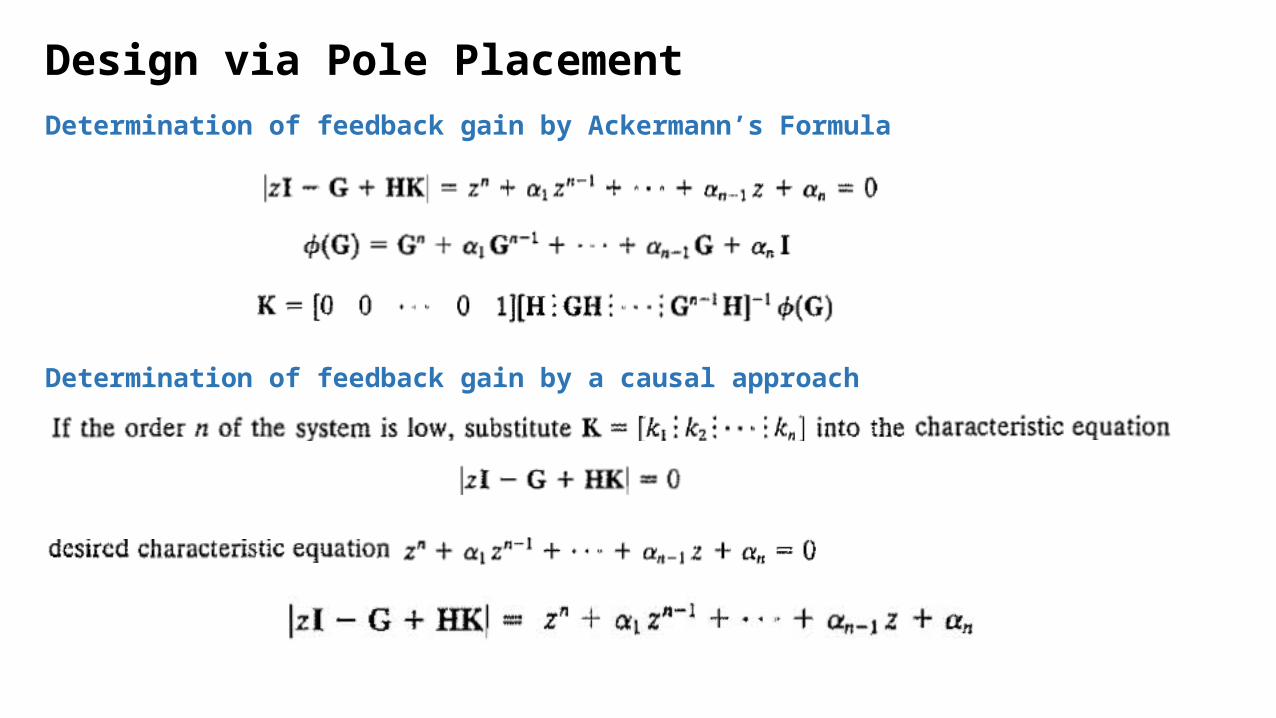
Determination of feedback gain by Ackermann’s Formula
Determination of feedback gain by a causal approach

Design via Pole Placement
Example:
Determination of feedback gain by using controllable canonical form:
Determination of feedback gain by using Ackermann’s Formula:
Determination of feedback gain bycausal method:...........

Design via Pole Placement
Uncontrollable system:
Kalman Controllable Form

Design via Pole Placement
Uncontrollable system:
Kalman Controllable Form
State Feedback
1 2(k 1) (k)
(k 1) (k)0
A B K A B Kx xc c cc cccx xAc cc
1 2(k) Kx(k) (k)u K K x 1K KV The modes of can
be arbitrarily assigned.
The modes of is not influenced by state feedback control
𝐴𝑐

Design via Pole Placement
Example:
Kalman Controllable Form
State Feedback
1 2(k 1) (k)
(k 1) (k)0
A B K A B Kx xc c cc cccx xAc cc
1 2(k) Kx(k) (k)u K K x 1K KV The modes of can
be arbitrarily assigned.
The modes of is not influenced by state feedback control
𝐴𝑐

Design via Pole Placement
Example:
Kalman Controllability Decomposition
Desired closed loop poles: -1, -2.5, -2.5
6.5 0.5 6.5 6.5 0 1 0
0.5 5.5 5.5 5.5 2 1 2(k 1) (k) (k)
0.5 0.5 0.5 6.5 3 4 3
0.5 0.5 5.5 0.5 3 2 3
x x u
6 1 0 0 1 1 1
0 6 0 0 1 1 1(k 1) (k) (k)
0 0 6 0 0 1 0
0 0 0 6 0 0 0
x x u
6 1 0 1 1 1
0 6 0 1 1 1
0 0 6 0 1 0c cA B
17.5 26 8.5
0 0 8.5
0 0 0
K
1 1
17.5 26 8.5 0
[ 0] 0 0 8.5 0
0 0 0 0
K K V V
Not: We do not feedback the uncontrollable mode

Design via Pole Placement
Example:
Kalman Controllability Decomposition
Desired closed loop poles: -1, -2.5, -2.5
6.5 0.5 6.5 6.5 0 1 0
0.5 5.5 5.5 5.5 2 1 2(k 1) (k) (k)
0.5 0.5 0.5 6.5 3 4 3
0.5 0.5 5.5 0.5 3 2 3
x x u
6 1 0 0 1 1 1
0 6 0 0 1 1 1(k 1) (k) (k)
0 0 6 0 0 1 0
0 0 0 6 0 0 0
x x u
6 1 0 1 1 1
0 6 0 1 1 1
0 0 6 0 1 0c cA B
17.5 26 8.5
0 0 8.5
0 0 0
K
1 1
17.5 26 8.5 0
[ 0] 0 0 8.5 0
0 0 0 0
K K V V
Not: We do not feedback the uncontrollable mode







