Distributed Consensus in Multivehicle Cooperative Control:
Theory and Applicationsy pp
Wei Ren and Randal W. BeardSpringer
ISBN: 978-1-84800-014-8
Tutorial Slides Prepared by Wei RenTutorial Slides Prepared by Wei Ren
Department of Electrical and Computer EngineeringUtah State UniversityUtah State [email protected]://www.neng.usu.edu/ece/faculty/wren/

Potential Applications for Autonomous Vehicles
Civil and Commercial:• Automated Mining• Monitoring environment• Monitoring environment • Monitoring disaster areas• Communications relays • Law enforcementLaw enforcement• Precision agricultureMilitary:• Special Operations: Situational
Intel
Special Operations: Situational Awareness
• Intelligence, surveillance, and reconnaissance
• Communication node• Battle damage assessmentHomeland Security:
2
y• Border patrol• Surveillance• Rural/Urban search and rescue
Epson

Cooperative/Coordinated Control• Motivation:
While single vehicles performing solo missions will yield some benefits greater benefits will come from theyield some benefits, greater benefits will come from the cooperation of teams of vehicles.
• Common Theme:courtesy: SRI, http://www.ai.sri.com
Coordinate the movement of multiple vehicles in acertain way to accomplish an objective.- e.g. many small, inexpensive vehicles acting together canachieve more than one monolithic vehicleachieve more than one monolithic vehicle.
e.g., networked computersShifts cost and complexity from hardware platform to software and algorithms.
courtesy: Airforce Technology, http://www.airforce-technology.com
• Multi-vehicle Applications:Space-based interferometers, future combat systems, surveillance and reconnaissance hazardous material
3
surveillance and reconnaissance, hazardous material handling, distributed reconfigurable sensor networks …
courtesy: NASA, http://planetquest.jpl.nasa.gov

Cooperative Control Categorization• Formation Control
Approaches: leader follower behavioral virtual- Approaches: leader-follower, behavioral, virtual structure/leader, artificial potential function, graph-rigidity- Applications: mobile robots, unmanned air vehicles,
d hi l lli fautonomous underwater vehicles, satellites, spacecraft, automated highways
• Task Assignment, cooperative transport, cooperative role assignment, air traffic control, cooperative timing
Cooperative search reconnaissance surveillance (military- Cooperative search, reconnaissance, surveillance (military, homeland security, border patrol, etc.)- Cooperative monitoring of forest fires, oil spills, wildlife, etc.
4
- Rural search and rescue.

Cooperative Control: Inherent Challenges
• Complexity: p y• Systems of systems.
• Communication: • Limited bandwidth and connectivity.• What? When? To whom?
• Arbitration:• Team vs. Individual goals.C i l• Computational resources:• Will always be limited
5

Cooperative Control: Centralized vs Distributed Schemes
• Centralized SchemesAssumptions: availability of global team knowledge, centralized planning and coordination, fully connected networkPractical Issues: sparse & intermittent interactionPractical Issues: sparse & intermittent interaction topologies (limited communication/sensing range, environmental factors)
• Distributed SchemesFeatures: Local neighbor-to-neighbor interaction, evolve in a parallel mannerin a parallel mannerStrengths: reduced communication/sensing requirement; improved scalability, flexibility, reliability, and
b
6
robustness

Distributed Consensus Algorithms• Basic Idea
Each vehicle updates its information state based pon the information states of its local (possibly time-varying) neighbors in such a way that the final information state of each vehicle
R
final information state of each vehicle converges to a common value.
• ExtensionsR l ti t t d i ti i ti f thRelative state deviations, incorporation of other group behaviors (e.g., collision avoidance)
• FeatureVicsek’s Model
Only local neighbor-to-neighbor interaction required
7
Boids: http://www.red3d.com/cwr/boids/
Consensus Algorithms – Literature Review
• Historical Perspectivebiology, physics, computer science, economics, loadbiology, physics, computer science, economics, load balancing in industry, complex networks
• Theoretic Aspectsalgebraic graph theory, nonlinear tools, random network, optimality and synthesis, communication delay, asynchronous communication, …asynchronous communication, …
• Applicationsrendezvous, formation control, flocking, attitude synchronization, sensor fusion, …
W i R R d l W B d Di t ib t d C i M lti hi l C p ti C t l
8
Wei Ren, Randal W. Beard, Distributed Consensus in Multi-vehicle Cooperative Control, Communications and Control Engineering Series, Springer-Verlag, London, 2008 (ISBN: 978-1-84800-014-8)

Modeling of Vehicle Interactions
A undirected graph that is connectedA directed spanning tree
(i) Separated groups
9
A graph that has a spanning tree but not strongly connected
A directed graph that is strongly connected
(ii) Multiple leaders
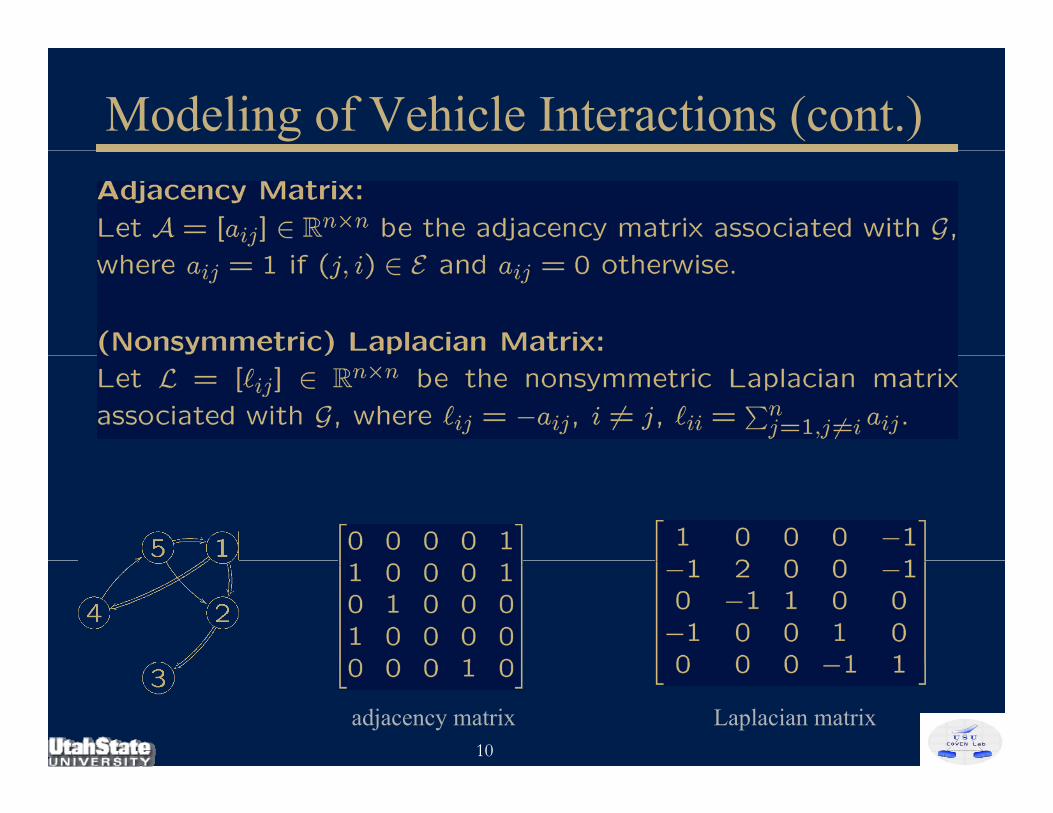
Modeling of Vehicle Interactions (cont.)
10
adjacency matrix Laplacian matrix
Outline•• Part 1: Consensus for SinglePart 1: Consensus for Single--integrator Kinematics integrator Kinematics ––
Theory and ApplicationsTheory and ApplicationsTheory and ApplicationsTheory and Applications
• Part 2: Consensus for Double integrator Dynamics• Part 2: Consensus for Double-integrator Dynamics –Theory and Applications
• Part 3: Consensus for Rigid Body Attitude Dynamics• Part 3: Consensus for Rigid Body Attitude Dynamics – Theory and Applications
• Part 4: Synchronization of Networked Euler-Part 4: Synchronization of Networked EulerLagrange Systems – Theory and Applications
11

Consensus Algorithm for 1st-order Kinematics
12
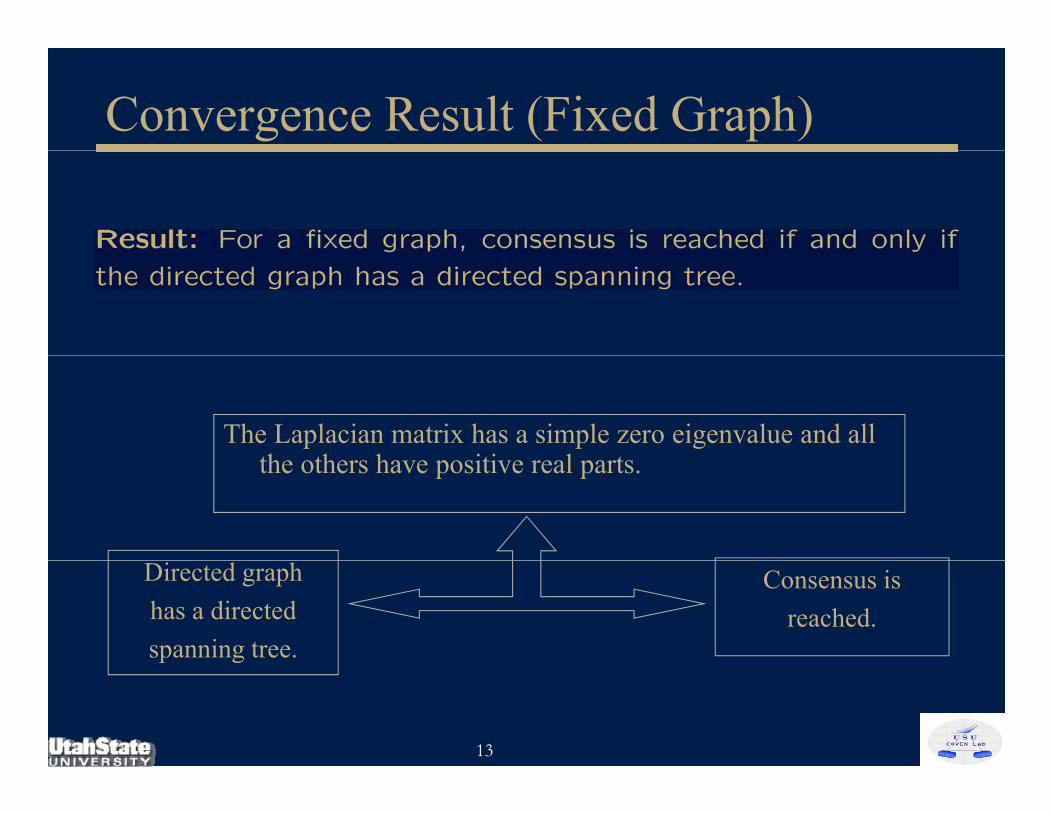
Convergence Result (Fixed Graph)
The Laplacian matrix has a simple zero eigenvalue and all th th h iti l tthe others have positive real parts.
Directed graph has a directed spanning tree.
Consensus isreached.
13

Sketch of the ProofAn inductive approach
• Step 1: find a spanning tree that is a subset of the graph
(1)
• Step 2: show that consensus can be achieved with the spanning tree (renumber each
)agent)
• Step 3: show that if consensus can be achieved forconsensus can be achieved for a graph, then adding more links will still guarantee consensus
14
(2) (3)consensus
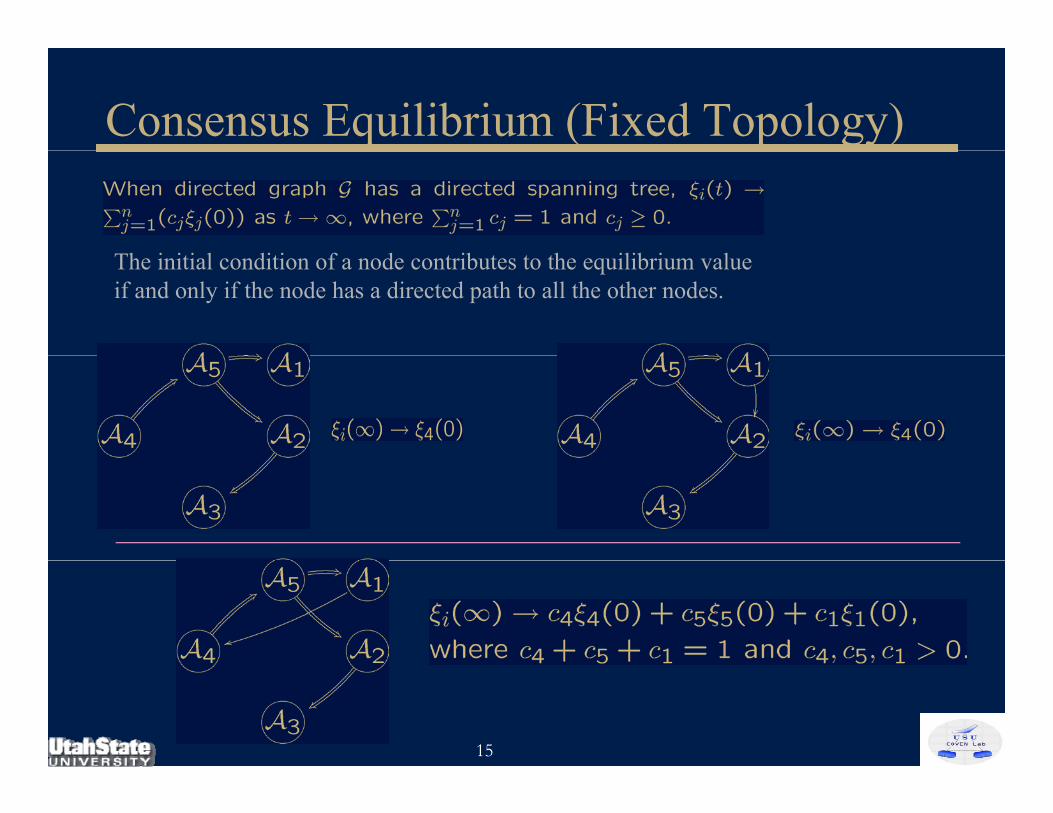
Consensus Equilibrium (Fixed Topology)
h i i i l di i f d ib h ilib i lThe initial condition of a node contributes to the equilibrium value if and only if the node has a directed path to all the other nodes.
15

Convergence Result (Switching Graphs)
16

Sketch of the Proof
17
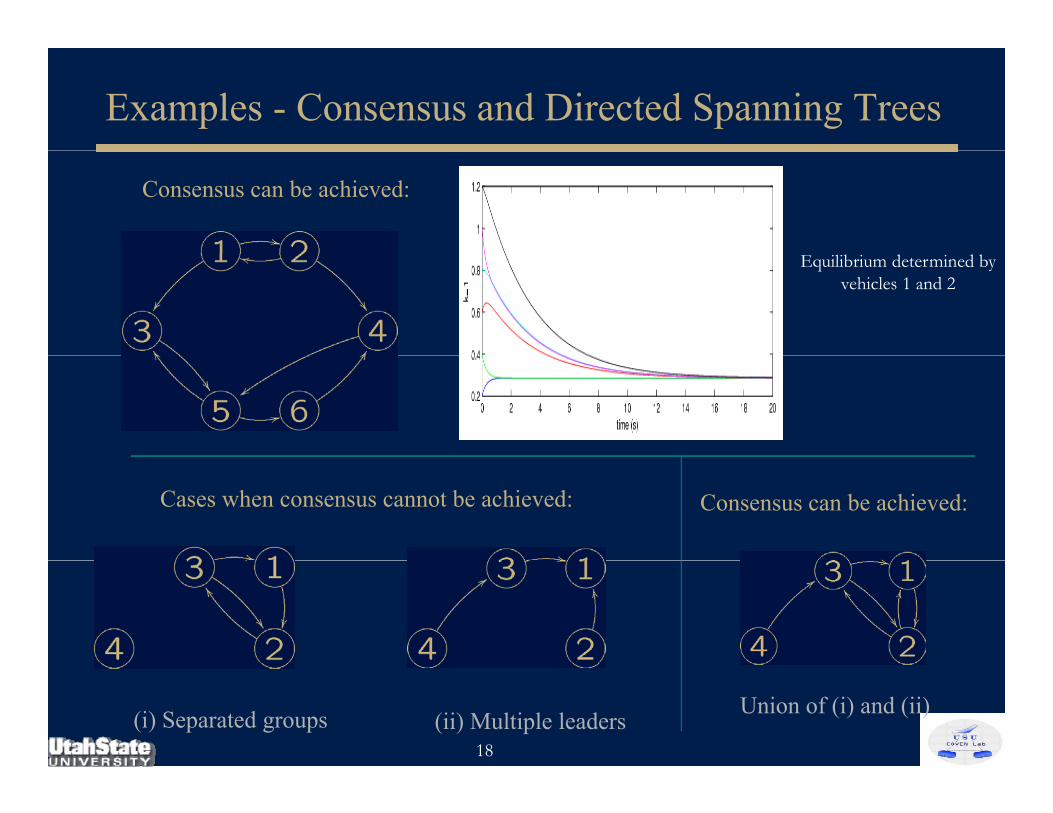
Examples - Consensus and Directed Spanning Trees
Consensus can be achieved:
Equilibrium determined byvehicles 1 and 2
Cases when consensus cannot be achieved: Consensus can be achieved:
18(i) Separated groups (ii) Multiple leaders
Union of (i) and (ii)

Rendezvous ‐ Experiments
Experiment was performed in CSOIS (joint work with Chao, Bougeous, Sorensen, and Chen)
Switching Topologies
19
Union Topology

Rendezvous Demos ‐ Switching Topologies
Union TopologySwitching Topologies
20

Axial Alignment
21
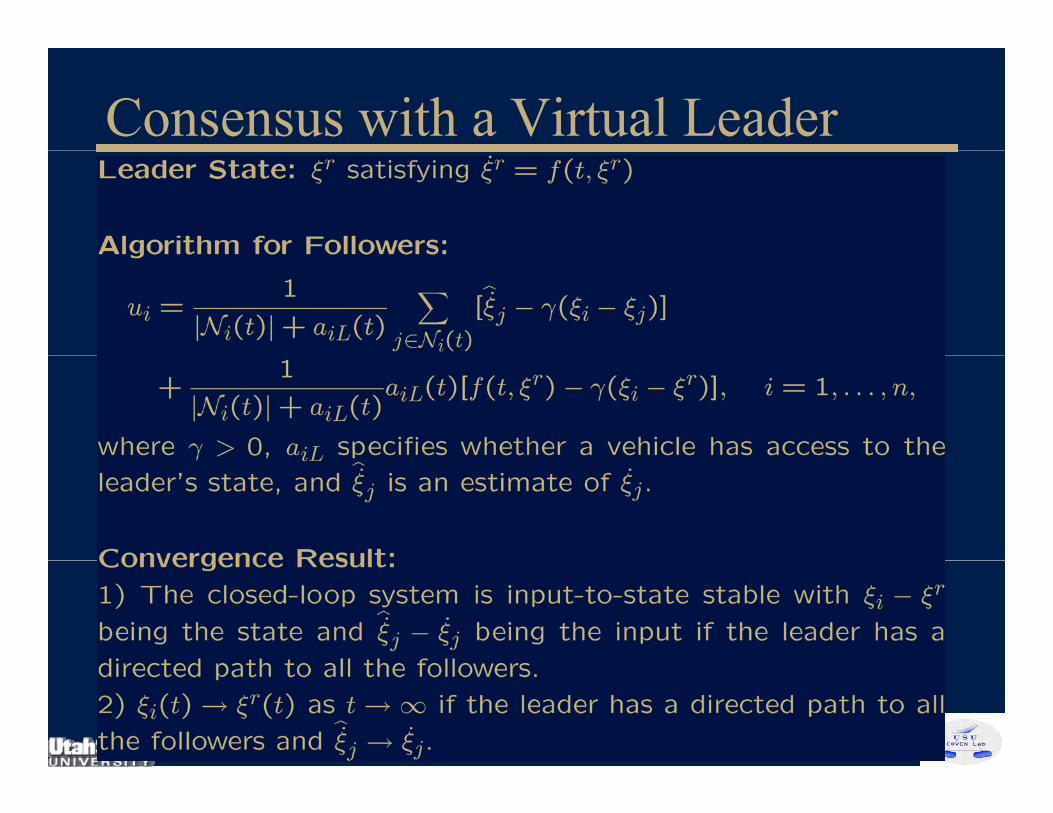
Consensus with a Virtual Leader
22

Sketch of the Proof
23
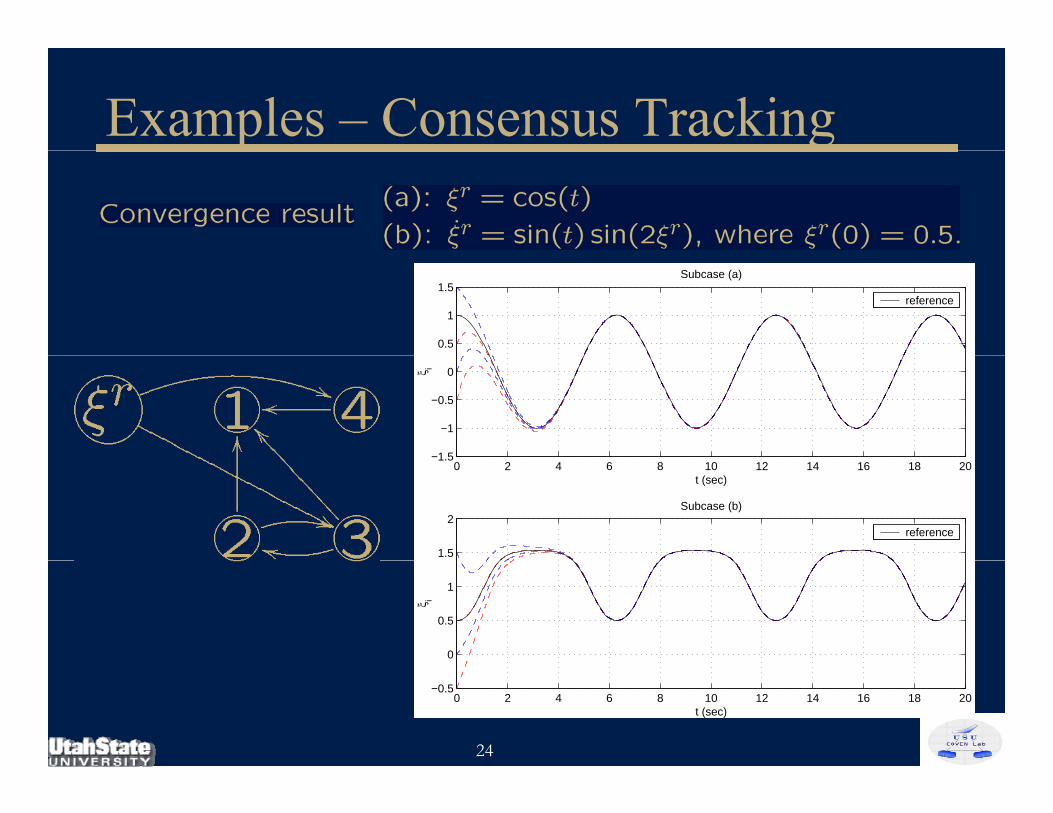
Examples – Consensus Tracking
0.5
1
1.5Subcase (a)
reference
−1.5
−1
−0.5
0ξ i
0 2 4 6 8 10 12 14 16 18 20−1.5
t (sec)
1.5
2Subcase (b)
reference
0
0.5
1
ξ i
24
0 2 4 6 8 10 12 14 16 18 20−0.5
t (sec)

Example - Virtual Leader/Structure Based Formation Control (Centralized)
rj d
rjF
(xvc,yvc,vc)rj rj
d
CF
Co
25
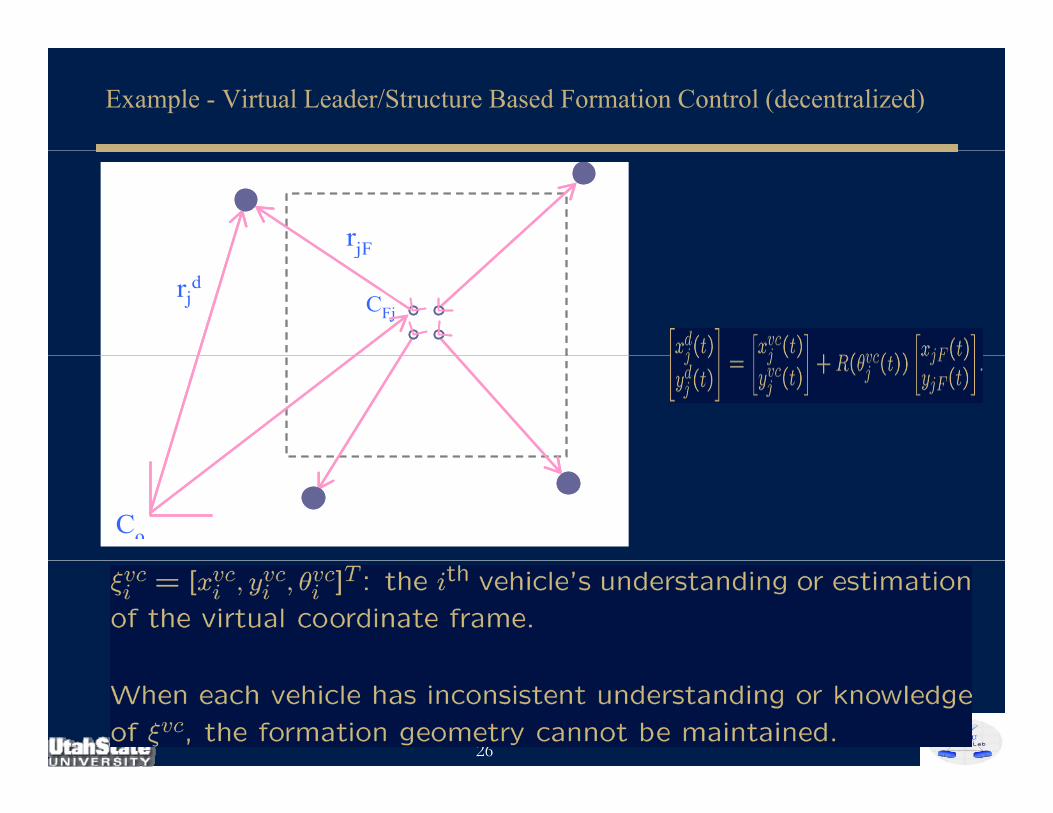
Example - Virtual Leader/Structure Based Formation Control (decentralized)
rjFrjF
CFj
jF
rjd
CFj
jF
rjd
CoCo
26

A Unified Scheme for Distributed Formation Control
Communication Network
Consensus-based Formation State Estimator Module #iState Estimator Module #i
Group Leader Follower
Consensus-based Formation Control Module #i
27
Vehicle #i

Formation State Estimation Level
28
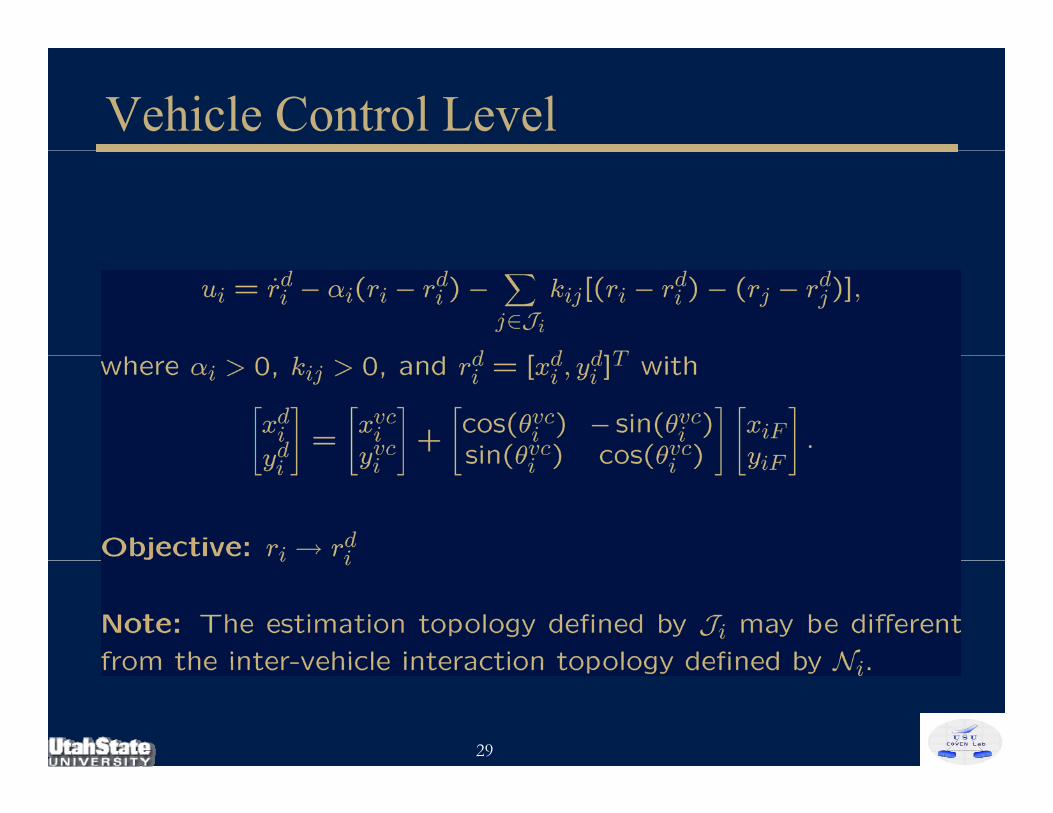
Vehicle Control Level
29

Experimental Platform at USU
30

Mobile Robot Kinematic Model
v
(x y)
v
y
θ
d(xh,yh)
31
(x,y)
xo

Experimental Specification
32
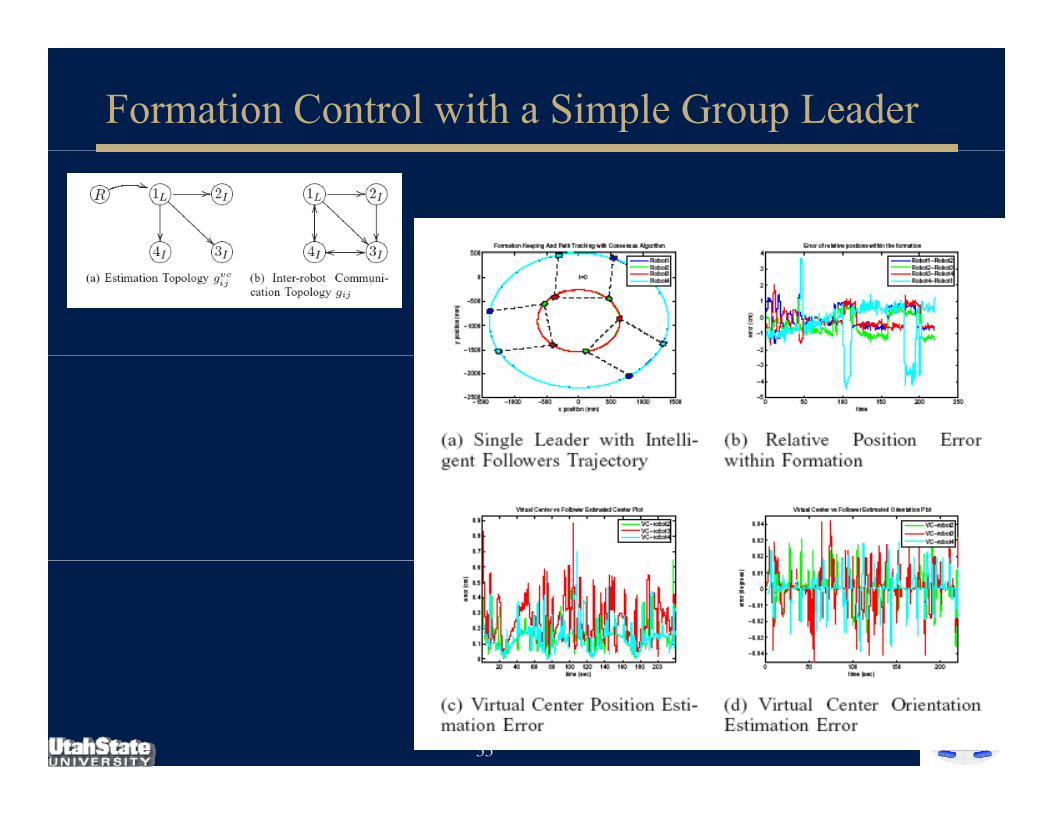
Formation Control with a Simple Group Leader
33
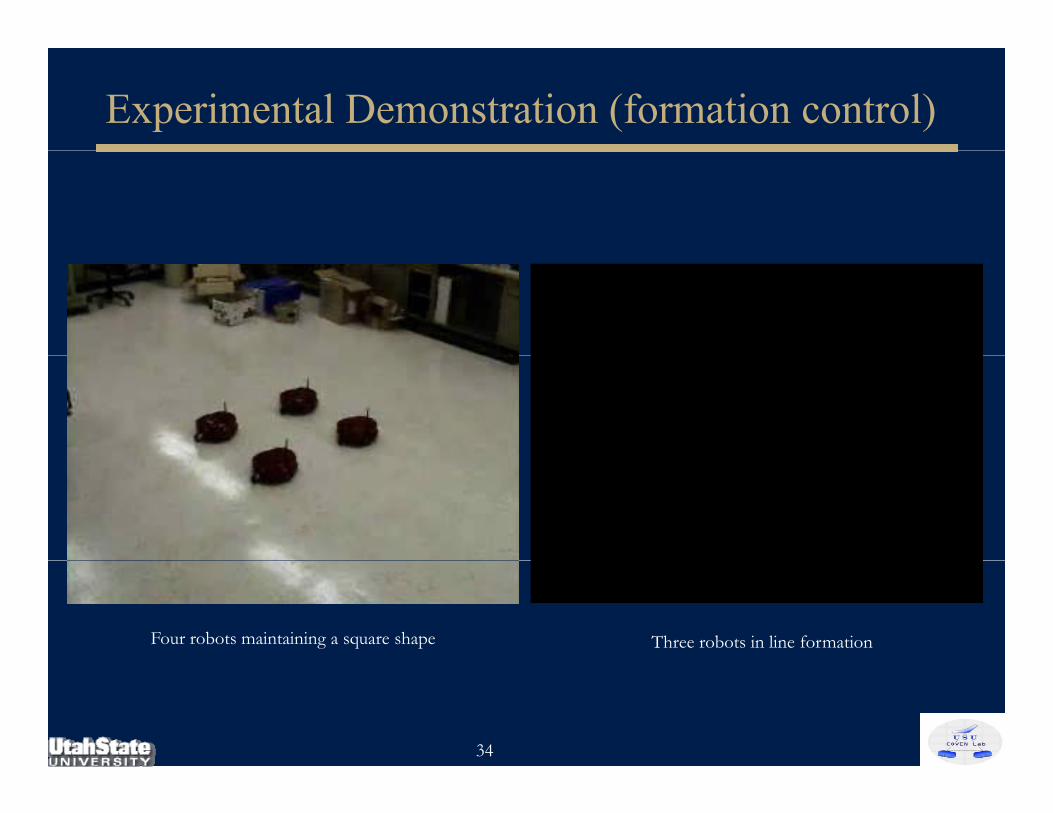
Experimental Demonstration (formation control)
Four robots maintaining a square shape Three robots in line formation
34

Outline• Part 1: Consensus for Single-integrator Kinematics –
Theory and ApplicationsTheory and Applications
•• Part 2: Consensus for DoublePart 2: Consensus for Double integrator Dynamicsintegrator Dynamics•• Part 2: Consensus for DoublePart 2: Consensus for Double--integrator Dynamics integrator Dynamics ––Theory and ApplicationsTheory and Applications
• Part 3: Consensus for Rigid Body Attitude Dynamics – Theory and ApplicationsTheory and Applications
• Part 4: Synchronization of Networked Euler-Lagrange Systems – Theory and Applications
35
Lagrange Systems Theory and Applications

Consensus Algorithm for Double-integrator Dynamics
36

Convergence Analysis (Relative Damping)
37

Example – with Relative Damping
1
1.2
1.4ξ
1ξ
2ξ
3
0.2
0.4
0.6
0.8
ξ i
3ξ
4
0 1 2 3 4 5 6 7 8 9 100
0.2
t (s)
0.3
0.1
0.2
0.3
ζ i
ζ1
ζ2
ζ3
ζ4
0 1 2 3 4 5 6 7 8 9 10−0.2
−0.1
0
38
0 1 2 3 4 5 6 7 8 9 10t (s)

Switching Topologies – Directed Case
39

Sketch of the Proof
40
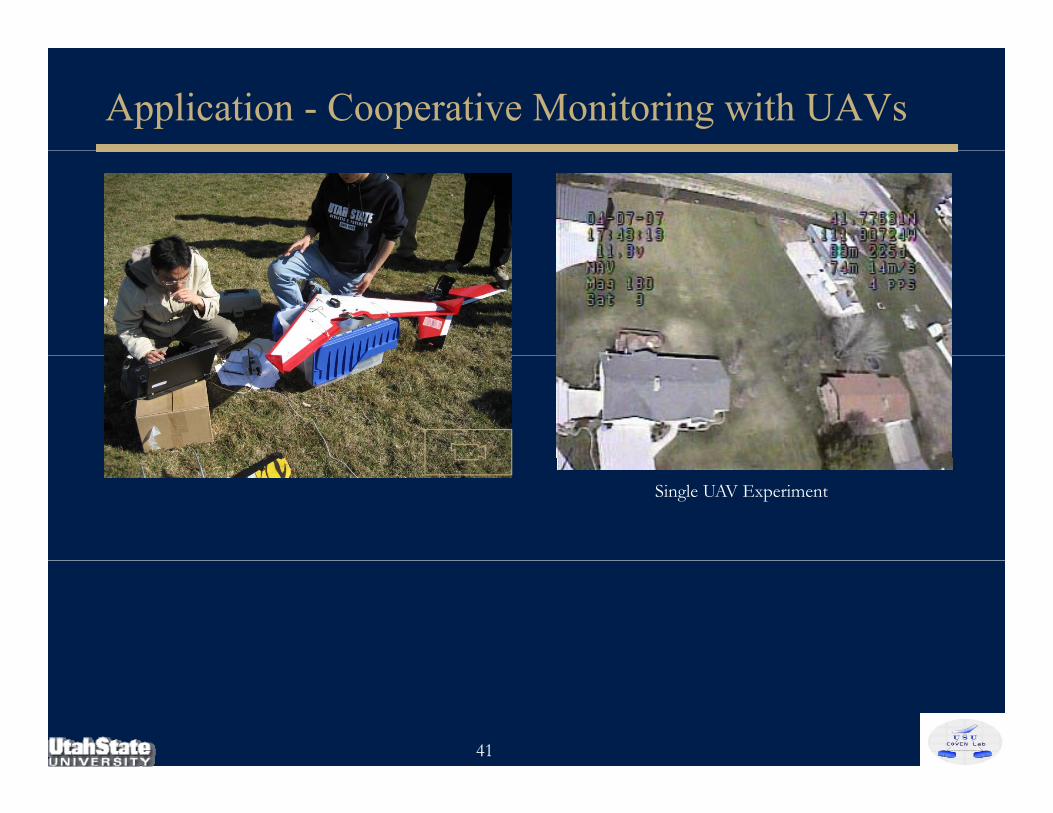
Application - Cooperative Monitoring with UAVs
Single UAV Experiment
41

Application – UAV Formation Flying
3D postflight analysis of the flight on July 4th, 2008. (Leader and follower are set at different altitudes to avoid possible collision The blue dots represent the
42
avoid possible collision. The blue dots represent the leader's positions and the red dots represent the
follower's positions.)

Actuator Saturation
43
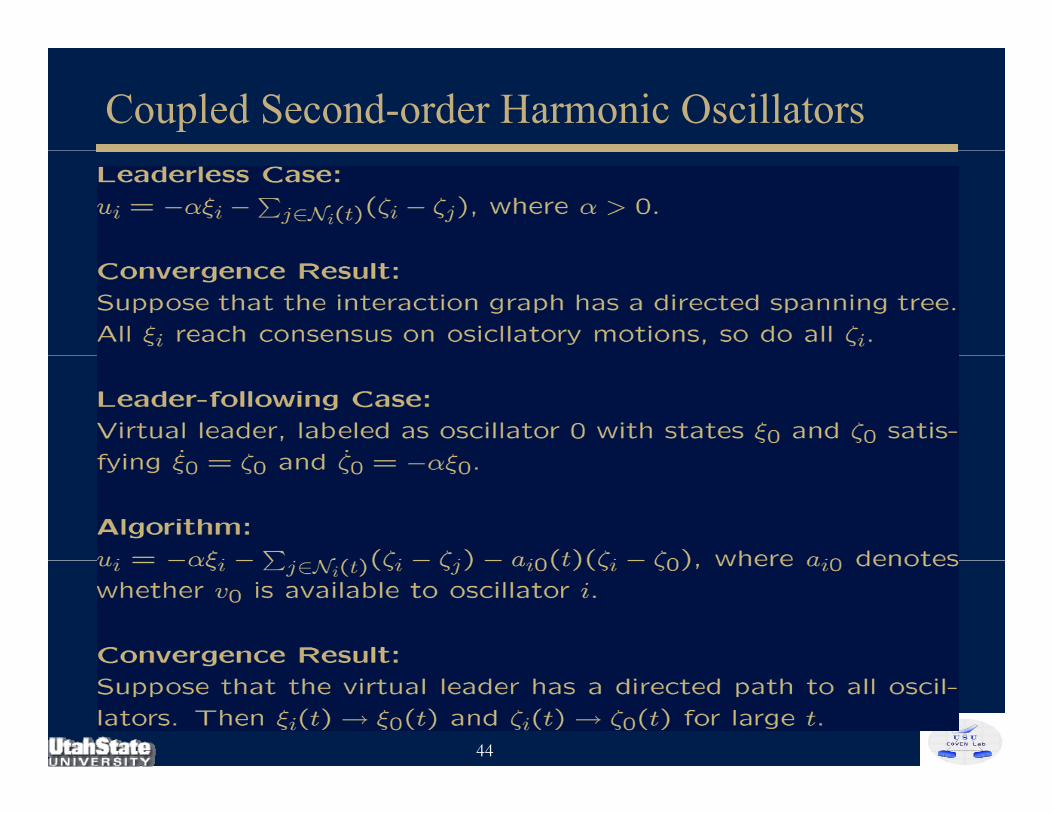
Coupled Second-order Harmonic Oscillators
44

Convergence Analysis (Leadless Case)
45

Application - Synchronized Motion Coordination
46

Outline• Part 1: Consensus for Single-integrator Kinematics –
Theory and ApplicationsTheory and Applications• Part 2: Consensus for Double-integrator Dynamics –
Theory and ApplicationsTheory and Applications
•• Part 3: Consensus for Rigid Body Attitude DynamicsPart 3: Consensus for Rigid Body Attitude Dynamics•• Part 3: Consensus for Rigid Body Attitude Dynamics Part 3: Consensus for Rigid Body Attitude Dynamics –– Theory and ApplicationsTheory and Applications
• Part 4: Synchronization of Networked Euler-Lagrange Systems – Theory and Applications
47
Lagrange Systems Theory and Applications

Consensus for Rigid Body Attitude Dynamics
48

Sketch of the Proof
49
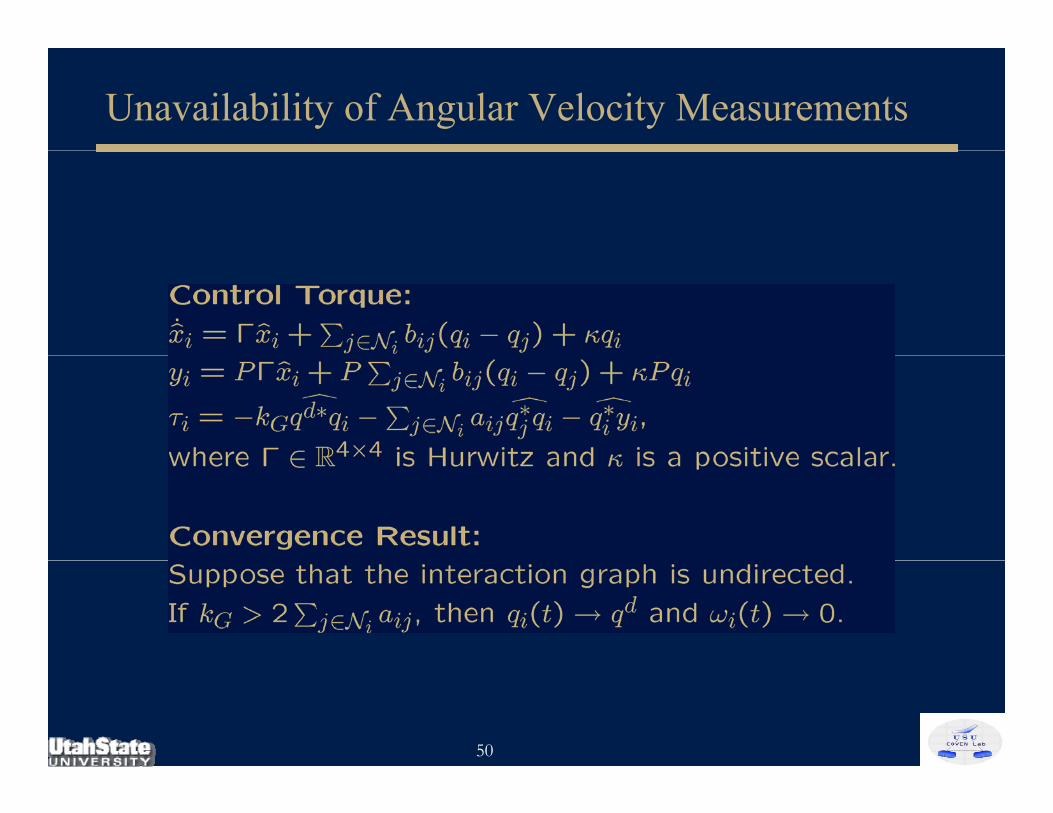
Unavailability of Angular Velocity Measurements
50
Sketch of the Proof
51

Application - Spacecraft Attitude Synchronization
Synchronized spacecraft rotationsCourtesy: NASA JPL
52
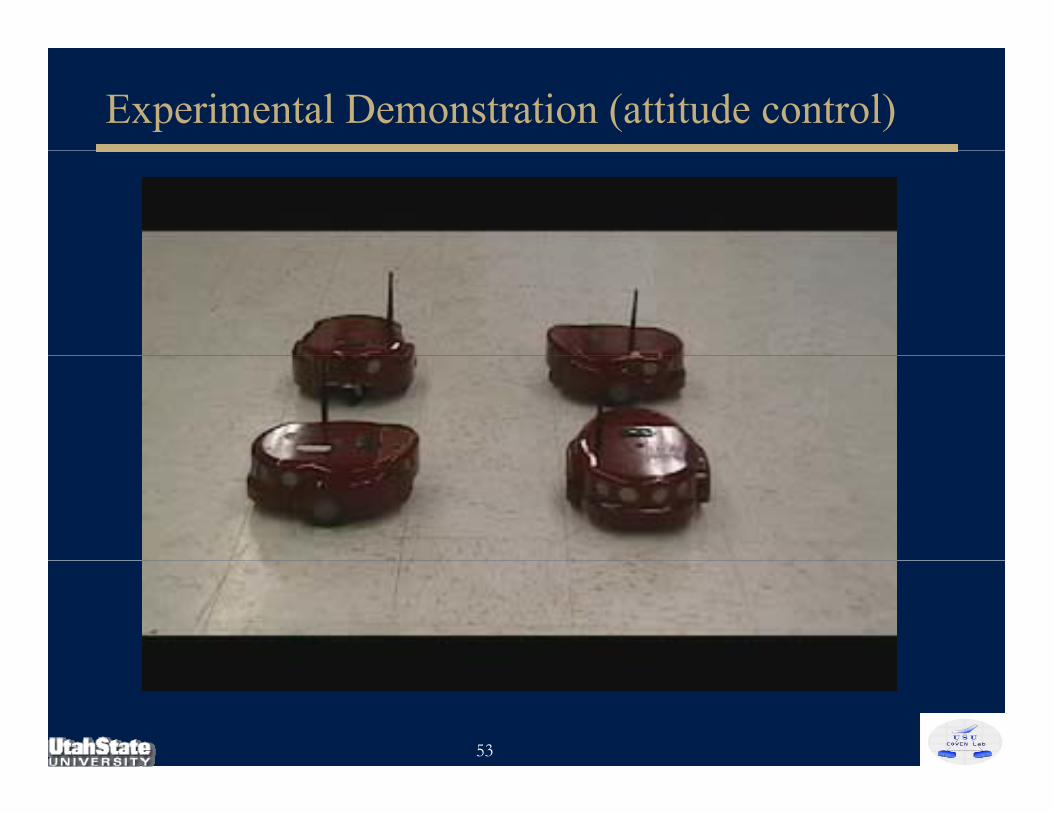
Experimental Demonstration (attitude control)
53
Reference Attitude Tracking
54
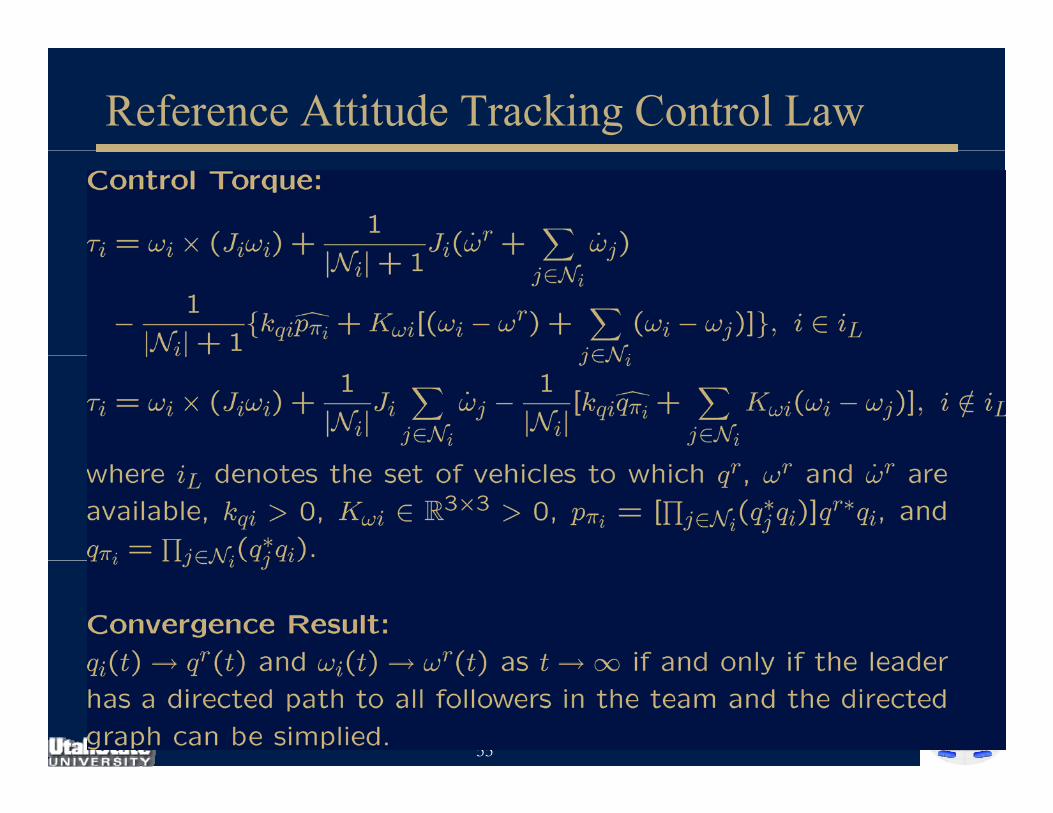
Reference Attitude Tracking Control Law
55

Sketch of the Proof
56

Application - Spacecraft Reference Attitude Tracking
57
Outline• Part 1: Consensus for Single-integrator Kinematics –
Theory and ApplicationsTheory and Applications• Part 2: Consensus for Double-integrator Dynamics –
Theory and ApplicationsTheory and Applications• Part 3: Consensus for Rigid Body Attitude Dynamics
– Theory and Applicationseo y d pp c o s
•• Part 4: Synchronization of Networked EulerPart 4: Synchronization of Networked Euler--Part 4: Synchronization of Networked EulerPart 4: Synchronization of Networked EulerLagrange Systems Lagrange Systems –– Theory and ApplicationsTheory and Applications
58

Synchronization of Networked Euler-Lagrange Systems
59







