
EE 570: Location and Navigation: Theory & Practice
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 17

Course Outline
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 2 of 17
• Required Textbook:
Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, by Paul Groves, Artech House, 2008.
• Recommended Software:
MATLAB Student Version
• Lectures:
Tue/Thur 11am - 12:15pm in CRAMER 123
• Instructors:
Dr. Stephen Bruder
Prof. Aly El-Osery
Course Outline
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 3 of 17
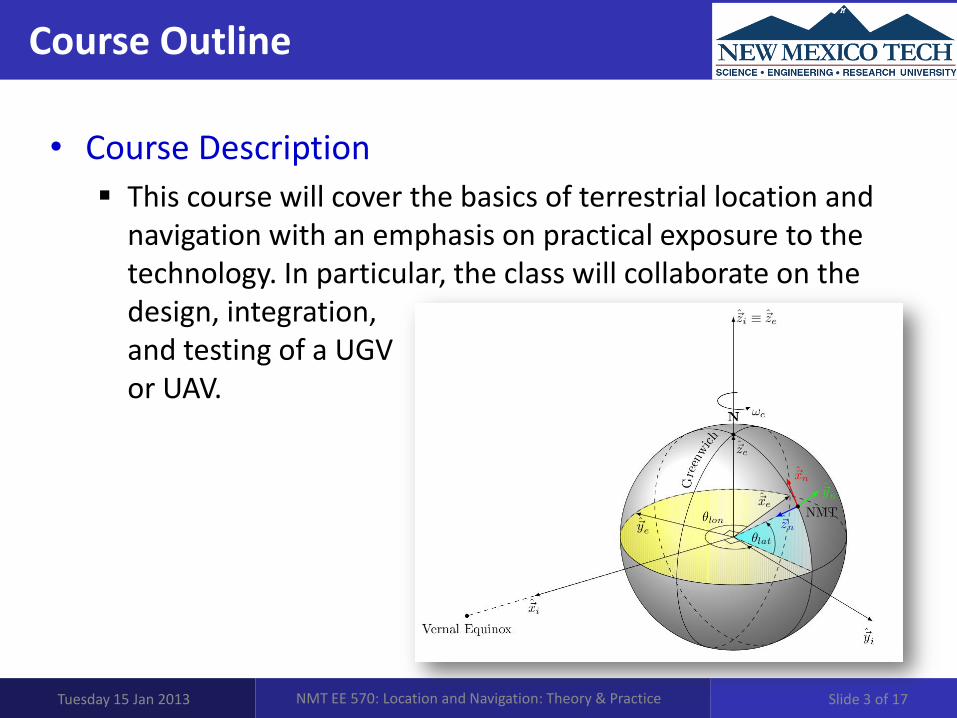
• Course Description
This course will cover the basics of terrestrial location and navigation with an emphasis on practical exposure to the technology. In particular, the class will collaborate on the design, integration, and testing of a UGV or UAV.

Course Outline
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 4 of 17
• Course Description
Key components of the course include: o GPS fundamentals;
o an overview of inertial navigation technology;
o principles of strapdown inertial navigation systems including coordinate frames, attitude representation, and mechanization in various coordinate frames;
o sensor technology covering a wide range of accelerometers and gyroscopes;
o sensor specifications and characterization;
o testing and calibration approaches;
o effects of inertial sensor error and compensation methods; and
o introduction to unmanned systems; analysis of real sensor data and simulation and modeling using MATLAB/Simulink.

Course Outline
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 5 of 17
• Grading Scheme
Homework Assignments: 30%
Three mini-projects: 10% each
Final Project and report: 30%
Class Participation: 10%

Course Outline
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 6 of 17
• Navigation Mathematics (Dr. Bruder)
Introduction to Navigation
Coordinate frames
Kinematics
Earth surface and Gravity
Frame Transformations
Part II: Chapter 2 of the textbook

Course Outline
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 7 of 17
• Navigation Sensors and INS Mechanization (Dr. Bruder / Prof. El-Osery)
Accelerometers
Gyroscopes
Error Characteristics
Inertial Navigation Equations
Part III: Chapters 4 & 5 of the textbook
Course Outline
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 8 of 17
• INS/GPS Integration (Prof. El-Osery)
GPS
Kalman Filtering
Integration Architectures
System Model
Measurement Model
• System Example (All)
Part III: Chapter 6
Part II: Chapter 3
Part IV: Chapter 12

EE 570: Location and Navigation: Theory & Practice
Introduction to Navigation
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 9 of 17

Introduction to Navigation: What is Location and/or Navigation?
• What is Navigation?
The process of determining a vehicle’s “course” by geometry, astronomy, radio signals, or other means
o Often described by Position, Velocity, and Attitude (PVA)
This can be accomplished via “position fixing” or “dead reckoning”
o Position Fixing - Directly measuring location
o Dead Reckoning - Measures changes in position and/or attitude
– Need to be initialized and then “integrate” the ’s
– Inertial sensors measure the ’s without requiring an external reference
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 10 of 17

Introduction to Navigation: A Simple Example of Dead Reckoning
• A Dead Reckoning Example:
At each epoc we measure x and
y with noise ( =1m)
Then add to the prior location
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120
140
Y-p
os in m
ete
rs
X-pos in meters
A 2D Dead Reckoning Example
Error Free
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120
140
Y-p
os in m
ete
rs
X-pos in meters
A 2D Dead Reckoning Example
Error Free
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120
140
Y-p
os in m
ete
rs
X-pos in meters
A 2D Dead Reckoning Example
Error Free
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120
140
Y-p
os in m
ete
rs
X-pos in meters
A 2D Dead Reckoning Example
Error Free
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120
140
Y-p
os in m
ete
rs
X-pos in meters
A 2D Dead Reckoning Example
Error Free
0 20 40 60 80 100 120 140 1600
20
40
60
80
100
120
140
Y-p
os in m
ete
rs
X-pos in meters
A 2D Dead Reckoning Example
Error Free
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 11 of 17

Introduction to Navigation: A Simple Example of Dead Reckoning
• A Dead Reckoning Example Radial error at each update (in m):
o 1.49, 1.97, 2.46, 2.83, 3.16, 3.42, 3.68, 3.94, 4.18
-20 0 20 40 60 80 100 120 140 160 1800
20
40
60
80
100
120
140
Y-p
os in m
ete
rs
X-pos in meters
A 2D Dead Reckoning Example
Error Free
r=1.49
r=1.79
r=2.46
r=2.83
r=3.16
r=3.42 r=3.68 r=3.94
r=4.18
1,000 Monte Carlo Runs
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 12 of 17

Introduction to Navigation: Navigation Examples
• DARPA Grand Challenge
PVA needed in terms of a local datum
o Local coordinate system
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 13 of 17

Introduction to Navigation: Navigation Examples
• Aircraft or UAV
Location relative to the earth
o Earth Centered Earth Fixed coord. Sys.
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 14 of 17

Introduction to Navigation: Navigation Examples
• Spacecraft
Relative to inertial or space coords
o Earth Centered Inertial coordinate system
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 15 of 17

Introduction to Navigation: Navigation Concepts
• There exists a wide variety of information sources (i.e. sensors)
Inertial, Doppler, GPS, radar, compass, cameras, odometry, barometric, …
• How should I describe my location?
Position, velocity, and attitude?
o Orientation can get a bit tricky!!
• When answering the question of “Where am I?” the wrt must be very clearly defined!!!
Lead in to the notion of coordinate systems
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 16 of 17

Introduction to Navigation: Navigation Sensors/Instruments
• Navigation Sensors: Past, Current, and Future
Sextant
Compass
Lat/Lon
Star Tracker
MEMS Inertial Sensors
Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 17 of 17







