
Exploring Protein Motors Exploring Protein Motors -- from what we can -- from what we can
measure to what we like to knowmeasure to what we like to know
Hongyun WangHongyun Wang
Department of Applied Mathematics and Statistics
University of California, Santa Cruz
Baskin School of Engineering Research Review Day
October 12, 2007

The goal of mathematical studies …The goal of mathematical studies …
Chen & Berg (2000) Yasuda, et al. (1998)
Visscher, Schnitzer & Block (1999)
… is to decipher motor mechanism from measurements.

An example of macroscopic motorAn example of macroscopic motor
Torque of a single cylinder engine:
(1) Intake (2) Compression (3) Expansion (4) Exhaust
How to find the motor forceHow to find the motor forceof a molecular motor?of a molecular motor?

Mathematical framework forMathematical framework for
molecular motorsmolecular motors

Mechanochemical Mechanochemical modelsmodels
Chemical reaction:
€
dSdt
= K x( )⋅S
Mechanical motion and chemical reaction are coupled.
Mechanical motion:
Chen & Berg (2000) Yasuda, et al. (1998)Visscher, Schnitzer & Block (1999)
ζdx
dt= ′φS x( )
Force frompotential
{ + ƒL
Loadforce
{ + 2kBTζdW t( )
dtBrownian
force
1 24 4 34 4
€
SITE[ ] ⇔ SITE∗ATP[ ]
c c
SITE ∗ADP[ ] ⇔ SITE∗ADP ∗Pi[ ]

Characters of molecular motorsCharacters of molecular motorsMolecular motors
Macroscopic motors
• Time scale of inertia << time scale of reaction cycle
• Instantaneous velocity >> average velocity
• Kinetic energy from average velocity << kBT
• Use thermal fluctuations to get over bumps
• Time scale of inertia >> time scale of reaction cycle
• Instantaneous velocity ≈ average velocity
• Kinetic energy from average velocity >> kBT
• Use stored kinetic energy (inertia) to get over bumps

Macroscopic motors use stored kinetic Macroscopic motors use stored kinetic energy to get over bumpsenergy to get over bumps
ΔV
V≈
ΔE
mV 2
ΔE
mV 2≈ 1% ⇒
ΔV
V≈ 1%
This does not work in molecular motors!This does not work in molecular motors!

Molecular motors use thermal Molecular motors use thermal excitations to get over bumpsexcitations to get over bumps
The energy for accelerating a bottle of water to
100 miles/hour
can only heat up the bottle of water by
0.24 degree!
Thermal energy is huge! Thermal energy is huge!

Mathematical Mathematical equationsequations
€
dxdt
= D− ′ φ S x( ) + ƒL
kBT+ 2D
dW t( )dt
( ){
( )1
DiffusionConvection Change ofoccupancy
, 1, 2, ,N
S LS SS S j j
jB
xD k x S N
t x k T x
φρ ρρ ρ
=
′ − ƒ⎛ ⎞∂ ∂∂= + =⎜ ⎟
∂ ∂ ∂⎜ ⎟⎝ ⎠
∑ K1 4 4 2 4 43 1 44 2 4 43
+
( )dx
dt= ⋅
SK S
Langevin formulation(stochastic evolution of an individual motor):
Fokker-Planck formulation(deterministic evolution of probability density):
(mechanical motion)
(chemical reaction)
Efficiencies of a molecular motorEfficiencies of a molecular motor

€
ηTD =f ⋅ v
−ΔG( )⋅ r,
Thermodynamic efficiency of a motor working Thermodynamic efficiency of a motor working
against a against a conservative forceconservative forceMotorsystem
Externalagent
Visscher et al (1999). Nature
Thermodynamic efficiency =Energy outputEnergy input

Viscous drag is not a conservative force:
€
ηStokes =ζ ⋅ v
2
−ΔG( )⋅ rThe Stokes efficiencyThe Stokes efficiency::
Stokes efficiency of a motor working Stokes efficiency of a motor working against a against a viscous dragviscous drag
Hunt et al (1994). Biophys. J.
Energy output = 0
Yasuda, et al (1998). Cell.

Stokes efficiency Stokes efficiency thermodynamic thermodynamic efficiencyefficiency
(experimental observations)(experimental observations)
Visscher et al (1999). NatureHunt et al (1994). Biophys. J.
€
limζ →∞
ζ ⋅ v < fStall
Viscous stall load < Thermodynamic stall load
Which measurement is correct?
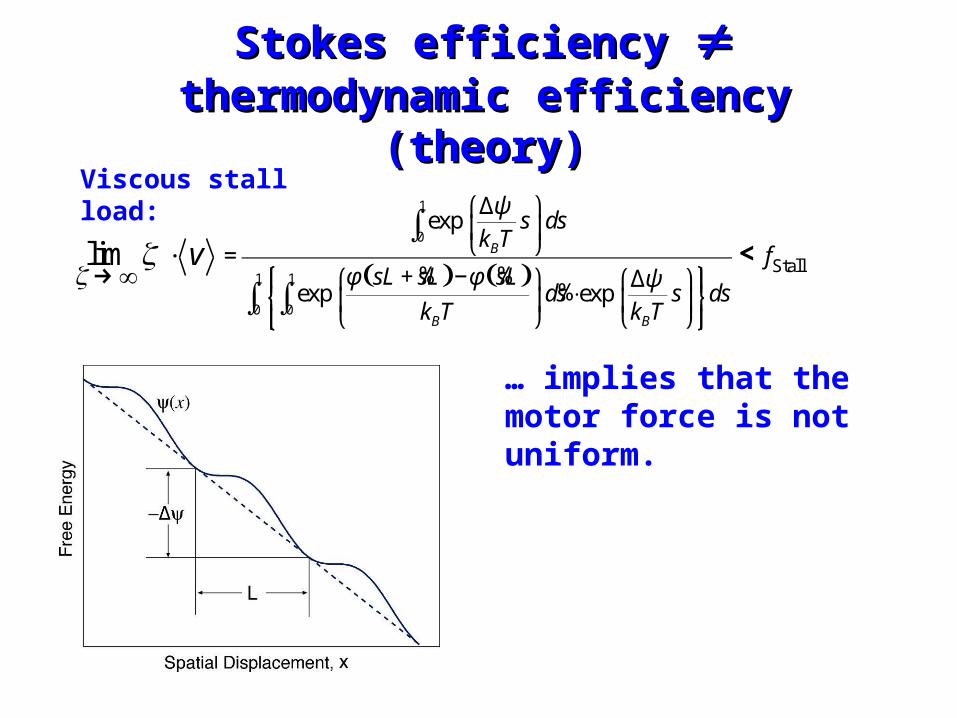
Stokes efficiency Stokes efficiency thermodynamic thermodynamic efficiencyefficiency(theory)(theory)
Viscous stall load:
lim vζ
ζ→∞
⋅( ) ( )
1
0
1 1
0 0
Stall
exp
exp exp
B
B B
s dsk T
fsL sL sL
ds s dsk T k T
ψ
φ φ ψ
⎛ ⎞Δ⎜ ⎟⎝ ⎠=
⎧ ⎫+ −⎛ ⎞ ⎛ ⎞Δ⎪ ⎪⋅⎨ ⎬⎜ ⎟ ⎜ ⎟
⎪ ⎪⎝ ⎠ ⎝ ⎠⎩ ⎭
∫
∫ ∫<
% %%
… implies that the motor force is not uniform.

Motor potential profileMotor potential profile

A mean-field potentialA mean-field potentialFokker-Planck formulation
At steady state, summing over S
( ) ƒ0 L
B
xD
x k T x
ψ ρρ
⎡ ⎤′ −∂ ∂⎢ ⎥= +
∂ ∂⎢ ⎥⎣ ⎦
€
ρ x( ) = ρS x( )S =1
N
∑
The motor behaves as if it were driven by a single potential (x)
(x) is called the motor potential profile.
€
′ x( ) =1
ρ x( )φS
′ x( )ρS x( )S=1
N
∑
Probability density of motor at x
Motor force at x (averaged over all chemical states).

The potential profile is The potential profile is measurablemeasurable
Time series of motor positions measured in single
molecule experiments
… does not work well
′ x( ) = x′ t( )x(t)=x
( ) ƒ0 L
B
xD
x k T x
ψ ρρ
⎡ ⎤′ −∂ ∂⎢ ⎥= +
∂ ∂⎢ ⎥⎣ ⎦
( ) L
B
vx fD J
k T x L
ψ ρρ
⎛ ⎞′ − ∂⎜ ⎟+ = =⎜ ⎟∂⎝ ⎠
( ) ( ) ( )0
1logL
B B
xx f x Jx ds
k T k T D s
ψρ
ρ
⋅= − −⎡ ⎤⎣ ⎦ ∫
Therefore, we only need to reconstruct PDF.
A more robust formulation:

Reconstructing potential in a test problemReconstructing potential in a test problem
Extracted motor potential profile
A sequence of 5000 motor positions generated in a
Langevin simulation

SummarySummary
Everything depends on a proper mathematical model
and
analysis of the model!

Time scale of inertiaTime scale of inertia
€
md vdt
= −ζ v − ′ φ S x( ) + ƒL + 2kBTζdW t( )
dt
Time scale of inertia:
Newton’s 2nd law:
€
t0 =mζ
€
m = ρ4π3
r 3 , ζ = 6πη r ⇒ t0 =mζ
= ρ2
9ηr2
For a bead of 1 m diameter:
€
t0 ≈ 56 ×10−9s = 56 ns







