
Introduction to constrained
optimization
- optimality conditions
Jussi Hakanen
Post-doctoral researcher [email protected]
spring 2014 TIES483 Nonlinear optimization
Structure of optimization methods
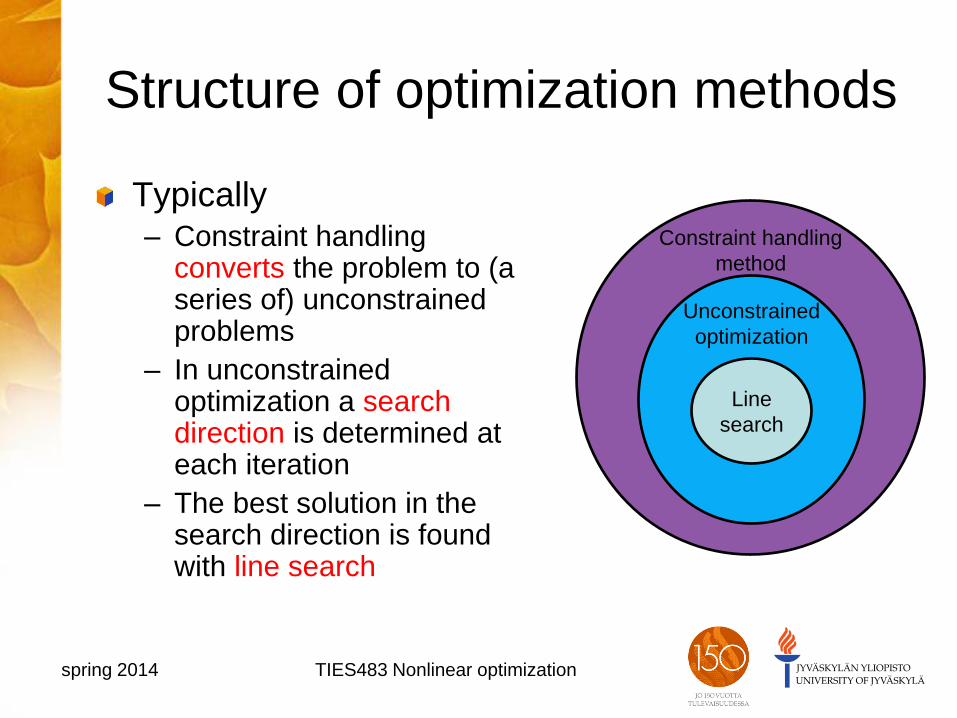
Typically – Constraint handling
converts the problem to (a series of) unconstrained problems
– In unconstrained optimization a search direction is determined at each iteration
– The best solution in the search direction is found with line search
spring 2014 TIES483 Nonlinear optimization
Constraint handling
method
Unconstrained
optimization
Line
search

Group discussion
Discuss in small groups (3-4) for 20-25
minutes
Each group writes down the answers of the
group for the following questions
At the end, we summarize what each group
found
spring 2014 TIES483 Nonlinear optimization

Group discussion: questions
1. What does optimality mean when there are
constraints? (draw figures of different
situations)
2. What kind of optimality conditions there exist
for constrained optimization? (use formulas)
3. List methods for unconstrained optimization?
– What are their general ideas?
– Why the methods for unconstrained optimization do
not work with constraints?
spring 2014 TIES483 Nonlinear optimization

min 𝑓 𝑥 , 𝑠. 𝑡. 𝑥 ∈ 𝑆 ⊂ 𝑅𝑛
𝑆 is the feasible region, consists of all the points that satisfy
the constraints
Constraints can be e.g.
– Box constraints: 𝑥𝑖𝑙 ≤ 𝑥𝑖 ≤ 𝑥𝑖
𝑢, 𝑖 = 1,… , 𝑛
– Inequality constraints: 𝑔𝑗 𝑥 ≤ 0, 𝑗 = 1, … ,𝑚
– Equality constraints: ℎ𝑗 𝑥 = 0, 𝑗 = 1,… , 𝑙
Special case: linear constraints
– 𝐴𝑥 ≤ 𝑏 (i.e., 𝑔 𝑥 = 𝐴𝑥 − 𝑏)
– 𝐴𝑥 = 𝑏 (i.e., ℎ 𝑥 = 𝐴𝑥 − 𝑏)
Constrained problem

Unconstrained problem
Adopted from Prof. L.T. Biegler (Carnegie Mellon University)

Inequality constraints
Adopted from Prof. L.T. Biegler (Carnegie Mellon University)
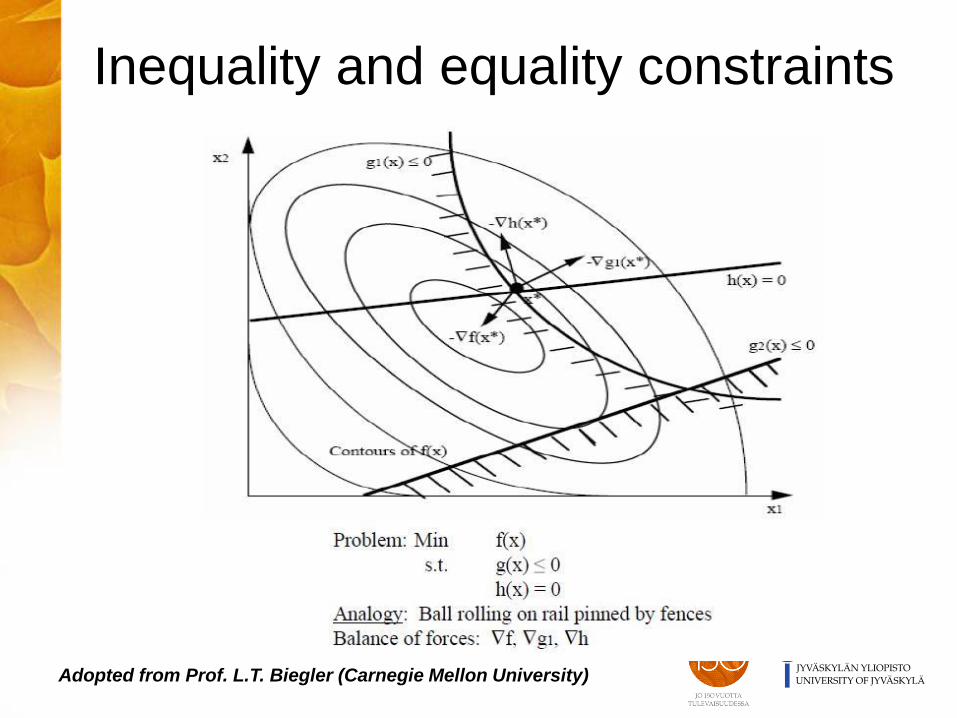
Inequality and equality constraints
Adopted from Prof. L.T. Biegler (Carnegie Mellon University)

Feasible descent directions
Definition: Let 𝑆 ⊂ 𝑅𝑛, 𝑆 ≠ ∅ and 𝑥∗ ∈ 𝑐𝑙 𝑆. Then
𝐷 = 𝑑 ∈ 𝑅𝑛 𝑑 ≠ 0 & 𝑥∗ + 𝛼𝑑 ∈ 𝑆 ∀𝛼 ∈ 0, 𝛿 }
for some 𝛿 > 0 is the cone of feasible directions of 𝑆
in 𝑥∗.
– Each 𝑑 ∈ 𝐷, 𝑑 ≠ 0 is a feasible direction
Definition:
𝐹 = 𝑑 ∈ 𝑅𝑛 𝑓 𝑥∗ + 𝛼𝑑 < 𝑓(𝑥∗) ∈ 𝑆 ∀𝛼 ∈ 0, 𝛿 }
for some 𝛿 > 0 is the cone of descent directions in 𝑥∗.
Note: Set 𝐹 ∩ 𝐷 = 𝑑 ∈ 𝑅𝑛 𝑑 ∈ 𝐹 & 𝑑 ∈ 𝐷} is the cone
of feasible descent directions
spring 2014 TIES483 Nonlinear optimization

A necessary condition
Let us consider min𝑓 𝑥 , 𝑠. 𝑡. 𝑥 ∈ 𝑆 ⊂ 𝑅𝑛 where 𝑆 ≠ ∅
Theorem: Let 𝑓 be differentiable in 𝑥∗ ∈ 𝑆. If 𝑥∗ is a local minimizer, then 𝐹∘ ∩ 𝐷 = ∅ where 𝐹∘ = 𝑑 ∈ 𝑅𝑛 𝛻𝑓 𝑥∗ 𝑇𝑑 < 0}. – That is, no descent direction in 𝑥∗ is feasible
spring 2014 TIES483 Nonlinear optimization
Unconstrained
minimizer
Level curves of f
From Miettinen: Nonlinear
optimization, 2007 (in Finnish)
Problem with only inequality
constraints
Let us consider
min𝑓 𝑥 , 𝑠. 𝑡. 𝑔𝑖 𝑥 ≤ 0, 𝑖 = 1,… ,𝑚
𝑆 = 𝑥 ∈ 𝑅𝑛 𝑔𝑖 𝑥 ≤ 0 ∀ 𝑖 = 1,… ,𝑚} where
𝑔𝑖: 𝑅𝑛 → 𝑅 ∀𝑖
Let 𝐼 denote the set of active constraints in 𝑥∗
i.e. 𝐼 = 𝑖 𝑔𝑖 𝑥∗ = 0}.
spring 2014 TIES483 Nonlinear optimization
A necessary condition (for inequality
constraints only)
Define 𝐺° = 𝑑 ∈ 𝑅𝑛 𝛻𝑔𝑖 𝑥∗ 𝑇𝑑 < 0 ∀𝑖 ∈ 𝐼}
Theorem: Let 𝑓 and 𝑔𝑖 be continuously
differentiable in 𝑥∗ ∈ 𝑆. If 𝑥∗ is a local
minimizer, then 𝐹∘ ∩ 𝐺° = ∅.
spring 2014 TIES483 Nonlinear optimization
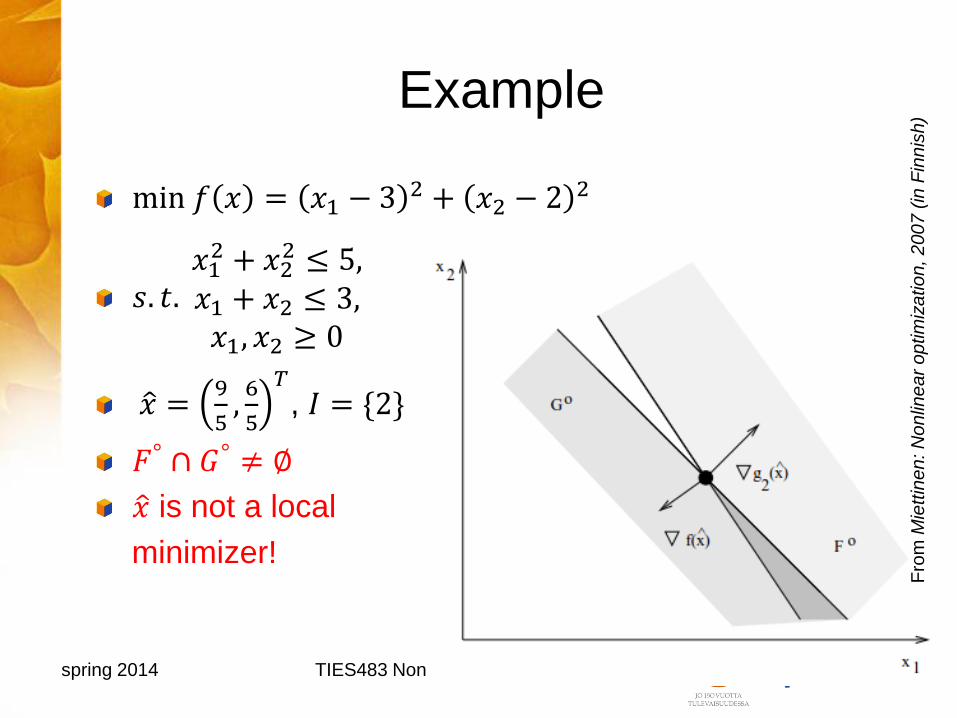
Example
min 𝑓 𝑥 = 𝑥1 − 3 2 + 𝑥2 − 2 2
𝑠. 𝑡. 𝑥12 + 𝑥2
2 ≤ 5,𝑥1 + 𝑥2 ≤ 3,𝑥1, 𝑥2 ≥ 0
𝑥 =9
5,6
5
𝑇, 𝐼 = {2}
𝐹° ∩ 𝐺° ≠ ∅
𝑥 is not a local
minimizer!
spring 2014 TIES483 Nonlinear optimization
Fro
m M
iett
ine
n: N
on
line
ar
op
tim
iza
tio
n, 2
00
7 (
in F
inn
ish
)

Notes
If 𝛻𝑓 𝑥∗ = 0, then 𝐹° = ∅ and 𝐹° ∩ 𝐺° = ∅
– All critical points satisfy necessary conditions
Any 𝑥∗ ∈ 𝑆 that satisfies 𝑔𝑖 𝑥∗ = 0 for some
𝑖 ∈ 𝐼 satisfies also the necessary conditions
spring 2014 TIES483 Nonlinear optimization

Fritz John conditions
(for inequality constraints only)
Necessary conditions: Let 𝑓 and 𝑔𝑖 be continuously differentiable in 𝑥∗ ∈ 𝑆. If 𝑥∗ is a local minimizer, then there exist multipliers 𝜆 ≥ 0 and 𝜇𝑖 ≥ 0, 𝑖 = 1,… ,𝑚 such that 𝜆, 𝜇 ≠ 0 and 1) 𝜆𝛻𝑓 𝑥∗ + 𝜇𝑖𝛻𝑔𝑖 𝑥∗ = 0𝑚
𝑖=1
2) 𝜇𝑖𝑔𝑖 𝑥∗ = 0 for all 𝑖 = 1,… ,𝑚.
Multipliers are usually called as Lagrange multipliers
– min 𝐿 𝑥, 𝜇 = 𝑓 𝑥 + 𝜇𝑖𝑔𝑖(𝑥)𝑚𝑖=1 , 𝑠. 𝑡. 𝑥 ∈ 𝑅𝑛
Conditions 2) are called complementarity conditions
spring 2014 TIES483 Nonlinear optimization

Example
spring 2014 TIES483 Nonlinear optimization
Fro
m M
iett
ine
n: N
on
line
ar
op
tim
iza
tio
n, 2
00
7 (
in F
inn
ish
)
min 𝑓 𝑥 = 𝑥1
𝑠. 𝑡. 𝑥2 − 1 − 𝑥1
3 ≤ 0−𝑥2 ≤ 0
𝑥∗ = 1,0 𝑇, 𝐼 = {1,2}
𝛻𝑓 𝑥∗ = 1,0 𝑇 , 𝛻𝑔1 𝑥∗ = (0,1)𝑇 , 𝛻𝑔2 𝑥∗ = 0,−1 𝑇
𝜆10
+ 𝜇101
+ 𝜇20−1
=00
only if 𝜆 = 0!
𝜇1 = 𝜇2 = 𝛼(> 0) will do → necessary conditions are satisfied
even though 𝑥∗ is not a local minimizer

KKT conditions
Assume that 𝜆 > 0 i.e. the gradient of the objective function is taken into account every time.
Since 𝜆 > 0 we can divide by it and can assume that 𝜆 = 1
In order to satisfy KKT conditions, some regularity must be assumed from the constraints – Constraint qualifications
Definition: A point 𝑥∗ ∈ 𝑆 is regular if the set of gradients of the active constraints 𝛻𝑔𝑖 𝑥∗ (𝑖 ∈ 𝐼) is linearly independent.
spring 2014 TIES483 Nonlinear optimization

KKT conditions
(for inequality constraints)
Necessary conditions: Let 𝑓 and 𝑔𝑖 be
continuously differentiable in a regular 𝑥∗ ∈ 𝑆.
If 𝑥∗ is a local minimizer, then there exist
multipliers 𝜇𝑖 ≥ 0, 𝑖 = 1,… ,𝑚 such that
1) 𝛻𝑓 𝑥∗ + 𝜇𝑖𝛻𝑔𝑖 𝑥∗ = 0𝑚𝑖=1
2) 𝜇𝑖𝑔𝑖 𝑥∗ = 0 for all 𝑖 = 1,… ,𝑚.
Note: If 𝑔𝑖 𝑥 ≥ 0, then 𝜇𝑖 ≤ 0
spring 2014 TIES483 Nonlinear optimization

KKT conditions
(for inequality constraints)
Sufficient conditions: Let 𝑓 and 𝑔𝑖 be continuously
differentiable and convex. Consider 𝑥∗ ∈ 𝑆. If there
exist multipliers 𝜇𝑖 ≥ 0, 𝑖 = 1,… ,𝑚 such that
1) 𝛻𝑓 𝑥∗ + 𝜇𝑖𝛻𝑔𝑖 𝑥∗ = 0𝑚𝑖=1
2) 𝜇𝑖𝑔𝑖 𝑥∗ = 0 for all 𝑖 = 1,… ,𝑚,
then 𝑥∗ is a global minimizer.
spring 2014 TIES483 Nonlinear optimization

Note
Alternatively, one can write
−𝛻𝑓 𝑥∗ = 𝜇𝑖𝑚𝑖=1 𝛻𝑔𝑖(𝑥
∗)
That is, −𝛻𝑓(𝑥∗) belongs to the cone defined
by the gradients of
the active constraints
spring 2014 TIES483 Nonlinear optimization

Problem with both inequality and
equality constraints
Let us consider
min𝑓 𝑥 , 𝑠. 𝑡. 𝑔𝑖 𝑥 ≤ 0, 𝑖 = 1,… ,𝑚 and
ℎ𝑗 𝑥 = 0, 𝑗 = 1,… , 𝑙
𝑆 = 𝑥 ∈ 𝑅𝑛 𝑔𝑖 𝑥 ≤ 0 ∀ 𝑖 = 1,… ,𝑚 & ℎ𝑗 𝑥 =
0 ∀ 𝑗 = 1,… , 𝑙} where 𝑔𝑖: 𝑅𝑛 → 𝑅 ∀𝑖 and
ℎ𝑗: 𝑅𝑛 → 𝑅 ∀𝑗
spring 2014 TIES483 Nonlinear optimization
KKT conditions
Definition: A point 𝑥∗ ∈ 𝑆 is regular if the set of gradients of the active inequality constraints 𝛻𝑔𝑖 𝑥∗ (𝑖 ∈ 𝐼) and equality constraints 𝛻ℎ𝑖 𝑥∗ (𝑖 = 1,… , 𝑙) are linearly independent.
Necessary conditions: Let 𝑓, 𝑔𝑖 and ℎ𝑖 be continuously differentiable in a regular 𝑥∗ ∈ 𝑆. If 𝑥∗ is a local minimizer, then there exist multipliers 𝜇𝑖 ≥ 0, 𝑖 = 1,… ,𝑚 and 𝜈𝑖 , 𝑖 = 1, … , 𝑙 such that
1) 𝛻𝑓 𝑥∗ + 𝜇𝑖𝛻𝑔𝑖 𝑥∗ + 𝜈𝑖𝛻ℎ𝑖(𝑥∗)𝑙
𝑖=1 = 0𝑚𝑖=1
2) 𝜇𝑖𝑔𝑖 𝑥∗ = 0 for all 𝑖 = 1,… ,𝑚.
spring 2014 TIES483 Nonlinear optimization

KKT conditions
Sufficient conditions: Let 𝑓, 𝑔𝑖 and ℎ𝑖 be
continuously differentiable and convex. Consider
𝑥∗ ∈ 𝑆. If there exist multipliers 𝜇𝑖 ≥ 0, 𝑖 = 1,… ,𝑚 and
𝜈𝑖 , 𝑖 = 1,… , 𝑙 such that
1) 𝛻𝑓 𝑥∗ + 𝜇𝑖𝛻𝑔𝑖 𝑥∗ + 𝜈𝑖𝛻ℎ𝑖(𝑥∗)𝑙
𝑖=1 = 0𝑚𝑖=1
2) 𝜇𝑖𝑔𝑖 𝑥∗ = 0 for all 𝑖 = 1,… ,𝑚,
then, 𝑥∗ is a global minimizer.
spring 2014 TIES483 Nonlinear optimization
Example
min𝑓 𝑥 = 𝑥1 − 3 2 + 𝑥2 − 2 2
s.t.
𝑥12 + 𝑥2
2 ≤ 5,𝑥1 + 2𝑥2 = 4,𝑥1, 𝑥2 ≥ 0
Formulate the KKT conditions
𝟐𝒙𝟏 − 𝟔 + 𝟐𝝁𝟏𝒙𝟏 − 𝝁𝟐 + 𝝂𝟏 = 𝟎𝟐𝒙𝟐 − 𝟒 + 𝟐𝝁𝟏𝒙𝟐 − 𝝁𝟑 + 𝟐𝝂𝟏 = 𝟎
𝝁𝟏 𝒙𝟏𝟐 + 𝒙𝟐
𝟐 − 𝟓 = 𝟎
−𝝁𝟐𝒙𝟏 = 𝟎−𝝁𝟑𝒙𝟐 = 𝟎
𝒙𝟏 + 𝟐𝒙𝟐 − 𝟒 = 𝟎
𝝁𝟏, 𝝁𝟐, 𝝁𝟑 ≥ 𝟎
spring 2014 TIES483 Nonlinear optimization







