
Linear Control System
EE 711
MIMO State Space Analysis and MIMO State Space Analysis and
Design
Lecture 8
Dr. Mostafa Abdel-geliel
Course Contents
� Review State Space (SS) modeling and analysis
� State feed back design
� Output feedback design
� Observer design� Observer design
� State feedback and observer
� Tracking problem
� Minimum realization
� Application

State Space Definition
• Steps of control system design
– Modeling: Equation of motion of the system
– Analysis: test system behavior
– Design: design a controller to achieve the required – Design: design a controller to achieve the required specification
– Implementation: Build the designed controller
– Validation and tuning: test the overall sysetm
• In SS :Modeling, analysis and design in time domain

SS-Definition
• In the classical control theory, the system model is
represented by a transfer function
• The analysis and control tool is based on classical methods
such as root locus and Bode plot
• It is restricted to single input/single output system• It is restricted to single input/single output system
• It depends only the information of input and output and it
does not use any knowledge of the interior structure of the
plant,
• It allows only limited control of the closed-loop behavior using
feedback control is used

• Modern control theory solves many of the
limitations by using a much “richer” description
of the plant dynamics.
• The so-called state-space description provide the • The so-called state-space description provide the
dynamics as a set of coupled first-order
differential equations in a set of internal variables
known as state variables, together with a set of
algebraic equations that combine the state
variables into physical output variables.

SS-Definition
• The Philosophy of SS based on transforming the equation of motions of order n (highest derivative order) into an nequation of 1st order
• State variable represents storage element in the system which leads to derivative equation between its input and output; it could be a physical or mathematical variablescould be a physical or mathematical variables
• # of state=#of storage elements=order of the system
• For example if a system is represented by
• This system of order 3 then it has 3 state and 3 storage elements

SS-Definition
• The concept of the state of a dynamic system refers to a
minimum set of variables, known as state variables, that fully
describe the system and its response to any given set of
inputs
The state variables are an internal description of the system
which completely characterize the system state at any time t, and
from which any output variables yi(t) may be computed.

The State Equations
A standard form for the state equations is used throughout system dynamics. In the
standard form the mathematical description of the system is expressed as a set of n
coupled first-order ordinary differential equations, known as the state equations,
in which the time derivative of each state variable is expressed in terms of the state
variables x1(t), . . . , xn(t) and the system inputs u1(t), . . . , ur(t).

It is common to express the state equations in a vector form, in which the set of n
state variables is written as a state vector x(t) = [x1(t), x2(t), . . . , xn(t)]T, and the set of r
inputs is written as an input vector u(t) = [u1(t), u2(t), . . . , ur(t)]T . Each state variable is
a time varying component of the column vector x(t).
٩
In this note we restrict attention primarily to a description of systems that are linear and
time-invariant (LTI), that is systems described by linear differential equations with constant
coefficients.

where the coefficients aij and bij are constants that describe the system. This set of n
equations defines the derivatives of the state variables to be a weighted sum of the
state variables and the system inputs.
١٠

where the state vector x is a column vector of length n, the input vector u is a
column vector of length r, A is an n × n square matrix of the constant coefficients
aij, and B is an n × r matrix of the coefficients bij that weight the inputs.
A system output is defined to be any system variable of interest. A description of a
physical system in terms of a set of state variables does not necessarily include all of
١١
physical system in terms of a set of state variables does not necessarily include all of
the variables of direct engineering interest.
An important property of the linear state equation description is that all system
variables may be represented by a linear combination of the state variables
xi and the system inputs ui.
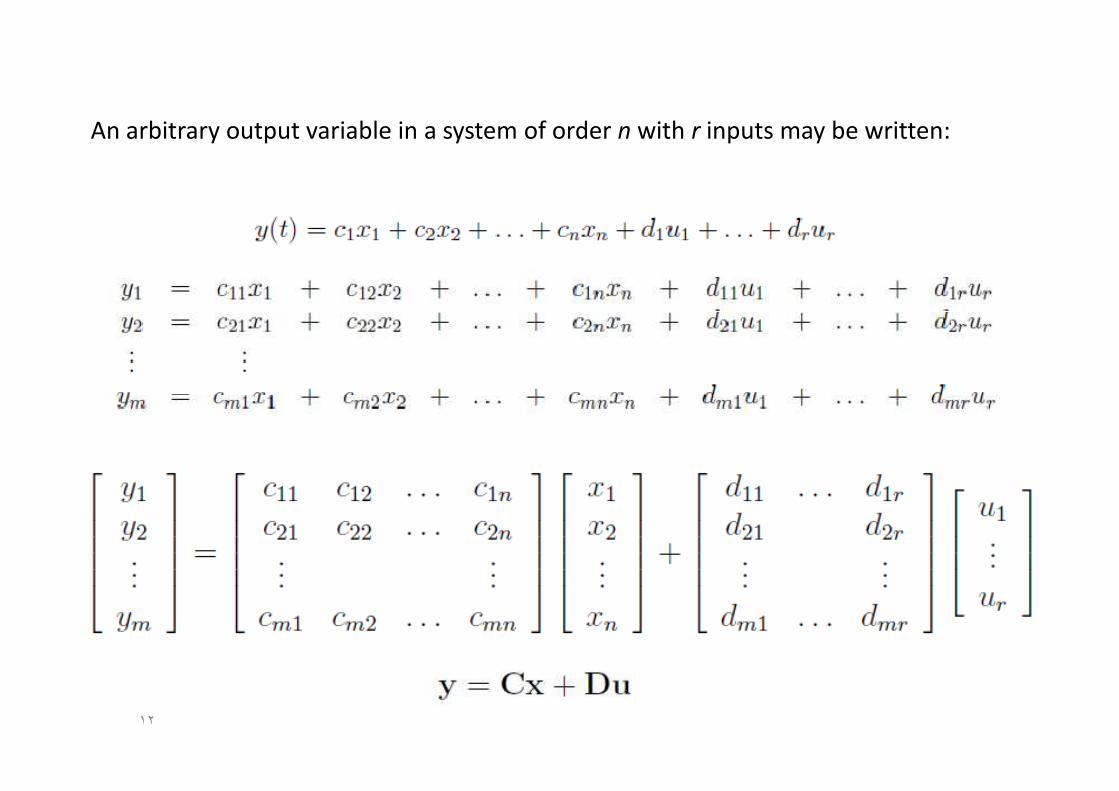
An arbitrary output variable in a system of order n with r inputs may be written:
١٢

١٣
where y is a column vector of the output variables yi(t), C is an m×n matrix of the
constant coefficients cij that weight the state variables, and D is an m × r matrix of the
constant coefficients dij that weight the system inputs. For many physical systems the
matrix D is the null matrix, and the output equation reduces to a simple weighted
combination of the state variables:

Example
Find the State equations for the series R-L-C electric circuit shown in
١٤
Solution:
capacitor voltage vC(t) and the inductor current iL(t) are state variables

)1(*)( Kdt
diLviRtv cs ++=
Prove
Appling KVL on the circuit
The relation of capacitor voltage and current
11dv
then dt
dvci c=
1
212
2
21
)](*[1
)(*
)1(
11
xvy
tuxRxL
x
tviRvdt
dix
equationfrom
xc
icdt
dvx
c
sc
c
==
+−−=
+−−==
===
&
&
&

Example
Draw a direct form realization of a block diagram, and write the
state equations in phase variable form, for a system with the
differential equation
Solution
we define state variables as,13,, 321 uyxandyxyx +=== &&&
١٦
we define state variables as
then the state space representation is
1
123
123
3
32
21
11713197
261319)13(7
261319713
13
xy
uxxx
uxxux
uyyyuyx
uxyx
xyx
=+−−−=
+−−−−=+−−−=−=
−====
&&&&&&&&
&&&
&&

[ ] )(]0[)(001)(
)(
117
13
0
)(
71913
100
010
)(
tutty
tutt
+=
−+
−−−=
x
xx&
Then the model will be
[ ] 0,001
117
13
0
,
71913
100
010
==
−=
−−−=
DC
BA
[ ] )(]0[)(001)(
where

Electro Mechanical System
١٨



State Space RepresentationThe complete system model for a linear time-invariant system consists of:
(i) a set of n state equations, defined in terms of the matrices A and B, and
(ii) a set of output equations that relate any output variables of interest to the state
variables and inputs, and expressed in terms of the C and D matrices.
The task of modeling the system is to derive the elements of the matrices, and to write The task of modeling the system is to derive the elements of the matrices, and to write
the system model in the form:
The matrices A and B are properties of the system and are determined by the
system structure and elements. The output equation matrices C and D are
determined by the particular choice of output variables.

Block Diagram Representation of Linear Systems
Described by State Equations
Step 1: Draw n integrator (S−1) blocks, and assign a state variable to the output of each
block.
Step 2: At the input to each block (which represents the derivative of its state variable)
draw a summing element.
Step 3: Use the state equations to connect the state variables and inputs to the
٢٢
Step 3: Use the state equations to connect the state variables and inputs to the
summing elements through scaling operator blocks.
Step 4: Expand the output equations and sum the state variables and inputs through a
set of scaling operators to form the components of the output.

Example 1
Draw a block diagram for the general second-order, single-input single-output
system:


The overall modeling procedure developed in this chapter is based on the following
steps:
1. Determination of the system order n and selection of a set of state variables
from the linear graph system representation.from the linear graph system representation.
2. Generation of a set of state equations and the system A and B matrices using a
well defined methodology. This step is also based on the linear graph system
description.
3. Determination of a suitable set of output equations and derivation of the
appropriate C and D matrices.

Consider the following RLC circuit
٢٦
We can choose state variables to be
Alternatively, we may choose
This will yield two different sets of state space equations, but both of them have the identical input-output relationship, expressed by
Can you derive this TF?
),(),( 21 tixtvx Lc ==).(ˆ),(ˆ 21 tvxtvx Lc ==
.1)(
)(2
0
++=
RCsLCs
R
sU
sV

Linking state space representation and
transfer function
� Given a transfer function, there exist infinitely many input-
output equivalent state space models.
� We are interested in special formats of state space
representation, known as canonical forms.
٢٧
We are interested in special formats of state space
representation, known as canonical forms.
� It is useful to develop a graphical model that relates the state
space representation to the corresponding transfer function.
The graphical model can be constructed in the form of signal-
flow graph or block diagram.

We recall Mason’s gain formula when all feedback loops are
touching and also touch all forward paths,
Consider a 4th-order TF
012
23
34
0
)()(
)(++++
==asasasas
b
sU
sYsG
gain loopfeedback of sum1gain path forward of Sum
11
−=
−=
∆
∆=
∑
∑∑
=
N
kk
kkk
L
PPT
٢٨
We notice the similarity between this TF and Mason’s gain formula above. To represent the system, we use 4 state variables Why?
40
31
22
13
40
0123
1
)(
−−−−
−
++++=
++++
sasasasa
sb
asasasassU

Signal-flow graph model
This 4th-order system
can be represented by
40
31
22
13
40
1)()(
)( −−−−
−
++++==
sasasasa
sb
sU
sYsG
٢٩
How do you verify this signal-flow graph by Mason’s
gain formula?

Block diagram model
Again, this 4th-order TF
can be represented by the block diagram as shown
40
31
22
13
40
012
23
34
0
1
)()(
)(
−−−−
−
++++=
++++==
sasasasa
sb
asasasas
b
sU
sYsG
٣٠
can be represented by the block diagram as shown

With either the signal-flow graph or block diagram of
the previous 4th-order system,
we define state variables as ,,,, xxxxxxbyx &&& ====
٣١
we define state variables as
then the state space representation is
,,,, 3423120
1 xxxxxxbyx &&& ====
10
433221104
43
32
21
xby
uxaxaxaxax
xx
xx
xx
=+−−−−=
===
&
&
&
&

Writing in matrix form
we have
)()()(
)()()(
ttt
ttt
DuCxy
BuAxx
+=+=&
٣٢
[ ] 0,000
1
0
0
0
,1000
0100
0010
0
3210
==
=
−−−−
=
Db
aaaa
C
BA

When studying an actual control system block diagram, we wish to
select the physical variables as state variables. For example, the block
diagram of an open loop DC motor is
155 −+ s 1−s 16 −s
٣٣
We draw the signal-flow diagraph of each block separately and then connect them. We selectx1=y(t), x2=i(t) and
x3=(1/4)r(t)-(1/20)u(t) to form the state space representation.
15155
−++
s
s121 −+ s
s131
6−+ s
s

Physical state variable model
٣٤
The corresponding state space equation is
x
xx
]001[
)(
1
5
0
500
2020
063
=
+
−−−
−=
y
tr&

Electro Mechanical System
٣٥



Control Flow
٣٨




State-Space Representations in Canonical Forms.
1- Controllable Canonical Form
٤٢
Special Case

Assume
then

٤٤

General Case
٤٥

٤٦

Controllable Canonical Form General case
٤٧

2- Observable Canonical Form
ubudt
dbu
dt
dbu
dt
dbyay
dt
day
dt
day
dt
dnn
n
n
n
n
n
nn
n
n
n
n
n
++++=++++−
−
−
−
−
−
−
−
..........2
2
21
1
102
2
21
1
1
)(.....)()( 222
2
111
1
0 yaubyaubdt
dyaub
dt
du
dt
dby
dt
dnnn
n
n
n
n
n
n
n
−++−+−+=−
−
−
−rearrange
Integrate both side n times
Prove
٤٨
dtyaubdtyaubdtyaububyn
nn∫∫∫ −++∫∫ −+∫ −+= )(.....)()( 22110
Integrate both side n times
ʃ-
+
+
+
y
xn
bo
ʃ-
+
+Xn-1
b1
+
b2
ʃ
an
-
+
bn
x1
u
a2
-
a1

General Form

3- Diagonal Canonical Form
٥٠

General Form
٥١

4- cascade Form
155 −+ s 1−s 16 −s
٥٢
15155
−++
s
s121 −+ s
s131
6−+ s
s

٥٣
The corresponding state space equation is
x
xx
]001[
)(
1
5
0
500
2020
063
=
+
−−−
−=
y
tr&

1- Consider the system given by
Obtain state-space representations in the controllable canonical form,
observable canonical form, and diagonal canonical form.
Controllable Canonical Form:
Examples
٥٤
Controllable Canonical Form:
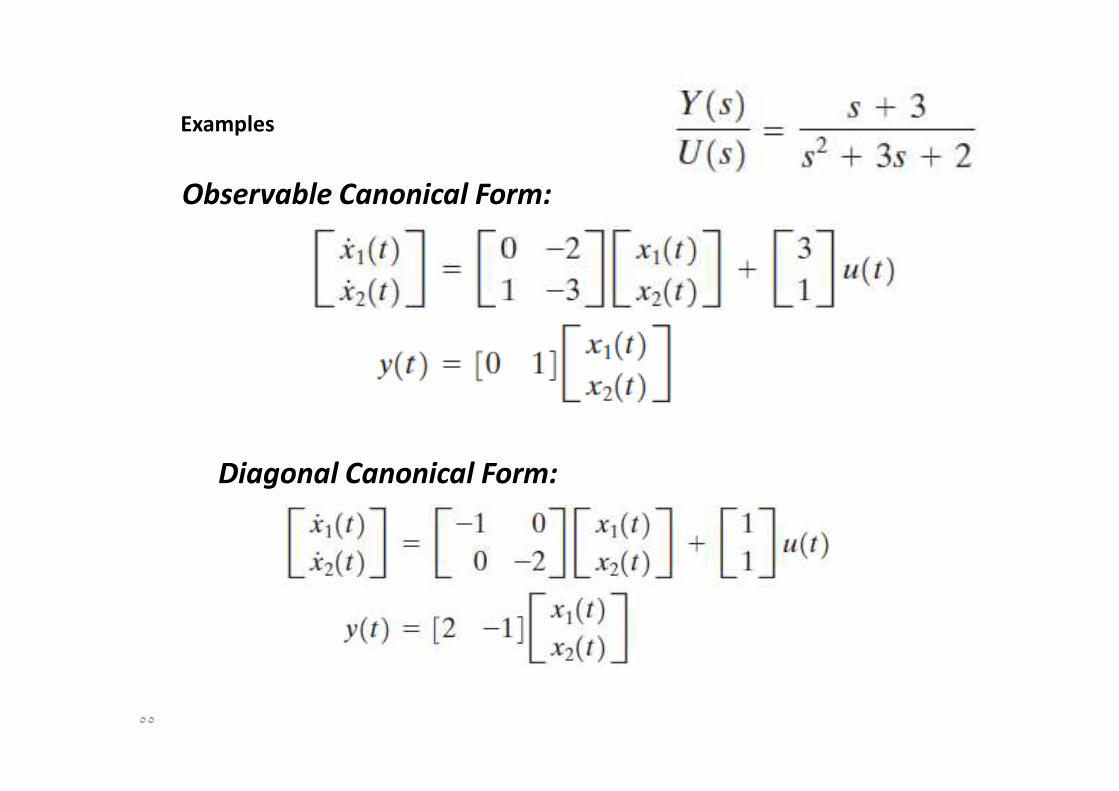
Observable Canonical Form:
Examples
٥٥
Diagonal Canonical Form:

0
Examples
٥٦
0
1
10 10

Examples
٥٧
0
1
5 . 24. 0

Eigenvalues of an n X n Matrix A.
The eigenvalues are also called the characteristic roots. Consider, for example,
the following matrix A:
٥٨
The eigenvalues of A are
the roots of the
characteristic equation,
or –1, –2, and –3.

Jordan canonical form
If a system has a multiple poles, the state space
representation can be written in a block diagonal form,
known as Jordan canonical form. For example,
Three poles are equal
٥٩
are equal

State-Space and Transfer Function
The SS form
Can be transformed into transfer function
٦٠
Tanking the Laplace transform and neglect initial condition then
)()0()()(
then
(2)
(1) and )()()0()(
sBsAss
(s)D(s)C (s)
sBsAss
UxXX
UXY
UXxX
+=−
+=+=−

( ))()()(
thencondition intial neglectingby
)()0()()(
1
sBsAsI
sBsAss
UX
UxXX
−−=
=−
+=−
( ) )()( 1 sBAsIs UX −−=
( )( ) DBAsIsGss
sDsBAsI
+−==
+−=−
−
1
1
C)()(/)(
)()(CY(s)
2in sub
UY
UU

State-Transition Matrix
We can write the solution of the homogeneous state equation
Laplace transform
٦٢
The inverse Laplace transform
Note that

Hence, the inverse Laplace transform of
٦٣
State-Transition Matrix
Note thatWhere

If the eigenvalues of the matrix A are distinct, than
will contain the n exponentials
٦٤

Properties of State-Transition Matrices.
٦٥

Obtain the state-transition matrix of the following system:
٦٦

٦٧

٦٨

and premultiplying both sides of this equation by
the NON- homogeneous state equation
٦٩
Integrating the preceding equation between 0 and t gives
or

unit-step function
٧٠

٧١

10
٧٢
Prove Transfer function of the given ss
Solution
DBAsICsG +−= −1)()(

Relation of Different SS Representations of the
Same System
For a given system G(s) has two different ss representations
)()()(
)()()(:M:Rep.1
11
111
tDtCt
tBtAt
uxy
uxx
+=+=&
)()()(
)()()(:M:Rep.2
22
222
tDtCt
tBtAt
uzy
uzz
+=+=&
Let Z=T x
Where T is the transformation matrix between x and z
For example
yyyx
yyyx
yyx
take
&&&&&
&&
+==+==
==
13
22
11
z ,
z ,
z ,

yyyx
yyyx
yyx
take
&&&&&
&&
+==+==
==
33
22
11
z ,
z ,
z ,
122
11
z
z
xx
x
then
+==
233
122
z
z
xx
xx
+=+=
xz
z
T
x
x
x
z
z
z
=
=
=
3
2
1
3
2
1
110
011
001
=110
011
001
T

Let i1 and i2 are the state Let i1 and vc are the state
[ ]
−=
+
−−
=
2
1
2
1
.
2
.
1
11
1
1
01
11
i
iy
ui
i
i
i
[ ]
=
+
−−
=
2
1
1
.
.
1
10
0
1
11
10
i
iy
uv
i
v
i
cc
−=
2
11
11
01
be willTmatrix ation transfromthe
i
i
v
i
c

Sub. By z=Tx in rep. 2
)()()(
)()()()(
Tby mutiply )()()()(
22
2
1
2
111
-1
22
tDtTCty
tBTtTATtTTtzT
tBtTAtTtz
ux
uxx
uxx
+=+==
+==−−−−
&&
&&
)()()( 22 tDtTCty ux +=
Compare with M1;rep.1
)()()(
)()()(:M:Rep.1
11
111
tDtCt
tBtAt
uxy
uxx
+=+=
then
21
21
2
1
1
2
1
1
DD
TCC
BTB
TATA
====
−
−
21
1
12
12
1
22
DD
TCC
TBB
TTAA
====
−
−

State-Space Diagonalization Function
Eign values and eign vectorsDefinition: for a given matrix A, if ther exist a real (complex)
λ and a corresponding vector v≠0, such that
vv λ=A
٧٧
Then λ is called eign value and v is the eign vector
i.e.
And since v≠0
Then
i.e
vv λ=A
0)( =− vIA λ
0)( =− IA λ0)det( =− IA λ

Eigenvalues of an n X n Matrix A.
The eigenvalues are also called the characteristic roots. Consider, for example,
the following matrix A:
٧٨
The eigenvalues of A are
the roots of the
characteristic equation,
or –1, –2, and –3.

Example
−=
28
10A
0)2(8
1
0A-I ofsolution theis eign value then the
=+−
−=−
=
λλ
λ
λ
AI)2(8 +− λ
24
)2)(4(082
21
2
=−=
−+==−+
λλ
λλλλ
and
then

−=∴
=
−−−−
==
028
14
..
0A)-I(
-4
12
11
11
v
v
ei
v
at
λλ
=
−−
==
048
12
..
0A)-I(
2
22
21
22
2
v
v
ei
v
at
λλ
Eign vectors are obtained as
−=
−=∴
4
1
4
1
1112
vlet
vv
=
=∴
2
1
2
2
222
22
vlet
vv
][ 21 nV vvv L=Eign vector matrix

For all eign values and vectors
niA iii ,,1,0; K== vv λThese equations can be written in matrix form
Λ= VVAwhere
n ][ 21 L= vvvV
{ }nidiag i
n
n
,,2,1,
00
00
00
][
2
1
21
L
L
MOMM
L
L
L
==
=Λ
=
λ
λ
λλ
vvvV
thus
1−Λ= VVA
VV A1−=Λ

thus
1
22 ...
!2)(
−Λ=
+++==
VVee
tAAtIte
tAt
At φ
),...,2,1,(
...!2
)(
2
1
22
niediage
e
e
ttIte
t
t
t
t
t
i ==
=
+Λ+Λ+==
−Λ
Λ
λλ
λ
φ
O
e tn
λ
O
Then for a given system has a system matrix A and a state vector X
The diagonal system matrix Ad and state Xd
21
1
1
1
1
1
1
;
DD
TCC
BVB
AVVA
matrixvectoreignVT
TT
ATTA
d
d
d
dd
d
====
====
=Λ=
−
−
−
−
xxxx

Example 2: find the transformation into diagonal form and the state transition matrix of example1
1
2
4
0
0
20
04
−Λ
−Λ
=
=
−=Λ
VVee
e
ee
tAt
t
t
t
= VVee
−
−=
−
−=
−
−−
14
12
0
0
24
11
6
1
24
11
0
0
24
11
2
4
1
2
4
t
t
At
t
t
At
e
ee
e
ee
Discus how to obtain the transformation matrix between two representation

Diagonal Canonical Form
٨٤

Alternative Form of the Condition for Complete State Controllability.
If the eigenvectors of A are distinct, then it is possible to find a transformation matrix
٨٥
If the eigenvectors of A are distinct, then it is possible to find a transformation matrix
P such that

Controllability and Observability
•Determine and control the system state from the observation of
the output over a finite time interval.
•The concepts of controllability and observability were introduced
by Kalman.
٨٦
by Kalman.
• They play an important role in the design of control systems in
state space.
•In fact, the conditions of controllability and observability may
govern the existence of a complete solution to the control system
design problem.

The vectors
are linearly dependent since
The vectors
٨٧
are linearly independent since
implies that

Note that:
• if an nxn matrix is nonsingular (that is, the matrix is of rank n or the
determinant is nonzero) then n column (or row) vectors are linearly
independent.
•If the nxn matrix is singular (that is, the rank of the matrix is less than n
or the determinant is zero), then n column (or row) vectors are linearly
dependent
To demonstrate this, notice that
٨٨

CONTROLLABILITY
Or
A system is said to be controllable at time t0 if there exist a piecewise unconstrained
continuous input “u(t)” (control vector) that will transfer the system from any initial
state x(t ) to any other state (final state) in a finite interval of time; t t ≥0.
A system is said to be controllable, if every state variable of the process can be
controlled to reach a certain objective in a finite time by some unconstrained
control u(t)
٨٩
state x(t0) to any other state (final state) in a finite interval of time; tf- t0 ≥0.
Complete State Controllability of Continuous-Time Systems

The system described by is said to be state controllable at t=t0 if
it is possible to construct an unconstrained control signal that will transfer an initial
state to any final state in a finite time interval
If every state is controllable, then the system is said to be completely state
controllable.
٩٠
Applying the definition of complete state controllability just given,

The system is completely state controllable if and only if the vectors
are linearly independent
is of rank nis of rank n

٩٢
Another prove
...!2
)(2
2 +++== tAAtIteAt φ
)()0()(
)()0()(
)()()0()()(
0
0
)(
0
τ
τ
ττφφ
τ
τ
Bueexetx
Buexetx
Butxttx
tAtAt
ttAt
t
∫+=
∫+=
∫ −+=
−
−
∫++++= −t
A dBuext
AAtItx0
22 )()0(...)[
!2()( τττ
t
0)(0
≠∫−
tA dBue τττ
The effect of input u(t)≠0 implies
)(
!2
][
)(]!2
[)(
22
22
τττ
τττττ
uI
I
I
BAABB
BuA
AIBue A
=−
O
L
K
Then the necessary condition to control x(t)
012 ≠− BABAABB nL

Observability
• Definition:
– For a dynamic system described by state variable
– The state x is said to be observable if for a given
input u(t) within a finite time and the
output y(t) and by the knowing of system
parameters (A,B,C and D) the initial state x(to) is
determined
of tt >

])()0(...)[!2
()()(0
22
∫++++== −t
A dBuext
AAtICtxCty τττ
)0(...)!2
()()(2
2
0
xt
AAtICdBueCtyt
A +++=∫− − τττ
2 CA
C
tt
)0(...]!2
[)()(
1
2
0
x
CA
CAtIItIdBueCty
n
tA
=∫−
−
−
Mτττ
∫−
= −−
−
−
tA
n
dBueCtyt
IItI
CA
CA
C
x0
12
1
1
))()((...]!2
[)0( τττ
M
It implies that must be nonsingular
−1nCA
CA
C
M

It can be shown that this requires
the rank of the nm*n matrix
If the system is completely observable, then, given the output y(t) over a time interval
x(0) is uniquely determined from Equation
to be n.
٩٥
The system is completely observable if and only if the n*nm matrix
is of rank n or has n linearly independent column vectors. This matrix is called the
observability matrix.

Consider the system described by
٩٦

Show that the following system is not completely observable:
٩٧
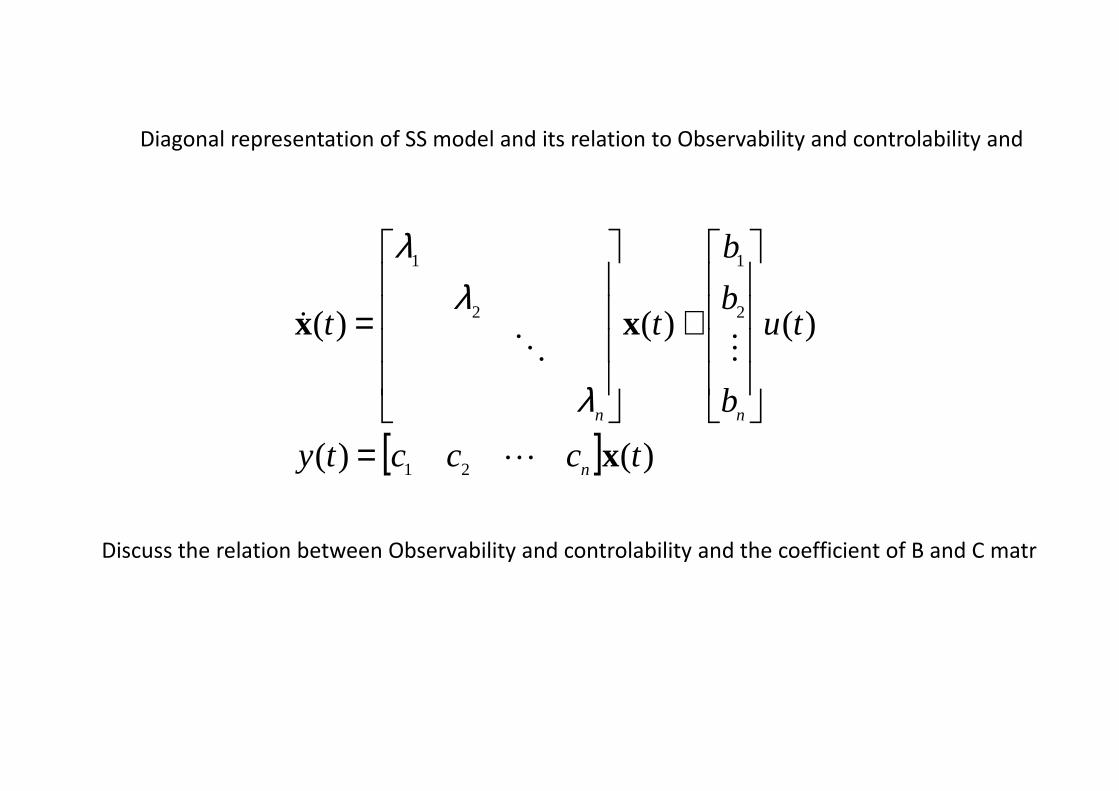
Diagonal representation of SS model and its relation to Observability and controlability and
)()()( 2
1
2
1
tu
b
b
b
tt xxMO
&
+
=
λ
λλ
[ ] )()( 21 tcccty
b
n
nn
xL=
λ
Discuss the relation between Observability and controlability and the coefficient of B and C matrix

Control System Design in State Space
•This Lecture discusses state-space design based on the pole-
placement method
•The pole-placement method is somewhat similar to the root-
٩٩
•The pole-placement method is somewhat similar to the root-
locus method
•in that we place closed-loop poles at desired locations.
•The basic difference is that in the root-locus design we place
only the dominant closed-loop poles at the desired locations,
•while in the pole-placement design we place all closed-loop
poles at desired locations.

POLE PLACEMENT
we shall present a design method commonly called the
pole-placement or pole-assignment technique. We assume
that all state variables are measurable and are available for
feedback.
١٠٠
feedback.
It will be shown that if the system considered is
completely state
controllable, then poles of the closed-loop system may be
placed at any desired locations by means of state
feedback through an appropriate state feedback gain
matrix.

Design by Pole Placement
Consider a control system
١٠١
where

We shall choose the control signal to be
This means that the control signal u is determined by an instantaneous state.
Such a scheme is called state feedback. The 1xn matrix K is called the state
feedback gain matrix.We assume that all state variables are available for
feedback. In the following analysis we assume that u is unconstrained.
١٠٢

The solution of this equation is given by
١٠٣
where x(0) is the initial state caused by external disturbances. The
stability and transient response characteristics are determined by the
eigenvalues of matrix A-BK.
If the eign values of matrix
are negative then the system is stabe
so K is selected to make the new eign values as required
BKAAf −=

r(t)
)()()(
)()()(
tDtCt
tBtAt
uxy
uxx
+=
+=&In general
After state feed back u(t)=r(t)-Kx(t)
Open loop system
BKAAf −=
)()()(
)()()(
tDtCt
tBtAt
f
f
rxy
rxx
+=+=&
)( DKCC f −=τττ dBeet
ttAtA ff )()0()(
0
)( rxx ∫+= −







