Practical Models of Human Visual Perception for Simulation
Chris DarkenAssoc. Prof., Computer Science
MOVES 11th Annual Research and Education SummitJuly 12, 2011
831-656-7582http://movesinstitute.org
Outline
• Why we care about perception• Quick tour of recent work applied to:
– Army’s Combat XXI (joint with TRAC)– ONR’s BASE-IT prototype
• Suggested future work

1. Facilitating Training
2. Real World Perceptual Tasks
3. Human Behavior Simulation
Outline: Three Methods
• Concealed routes• Pre-cached approximate LOS• Hierarchical threat maps

Background• Two types of visual perception deficits for synthetic entities in
combat sims– Complete lack of terrain info visible to the user– Information provided, but not aggregated properly
• Significance of visual perception deficits– Hunting and avoiding threats in combat sims requires adequate visual
perception representation• This is especially true for analytic simulations of situational awareness
enhancing gear– Failure to fix deficits makes accurate behavior either
• Impossible• Too computationally inefficient for practical use• Too difficult for the typical scenario developer to implement
Outline: Three Methods
• Concealed routes• Pre-cached approximate LOS• Hierarchical threat maps
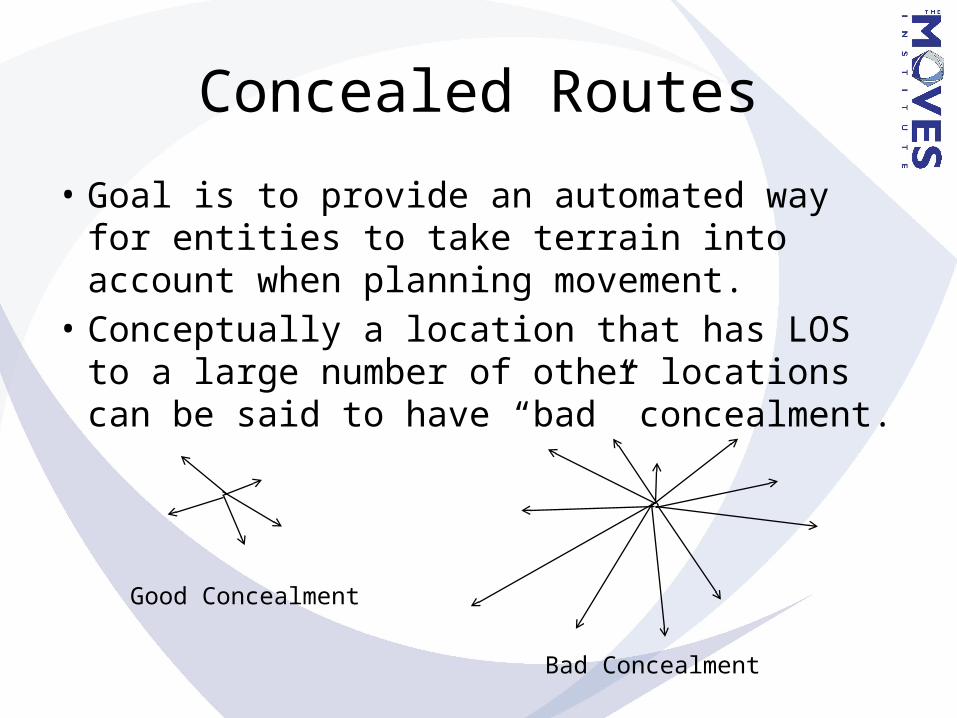
Concealed Routes
• Goal is to provide an automated way for entities to take terrain into account when planning movement.
• Conceptually a location that has LOS to a large number of other locations can be said to have “bad” concealment.
Good Concealment
Bad Concealment
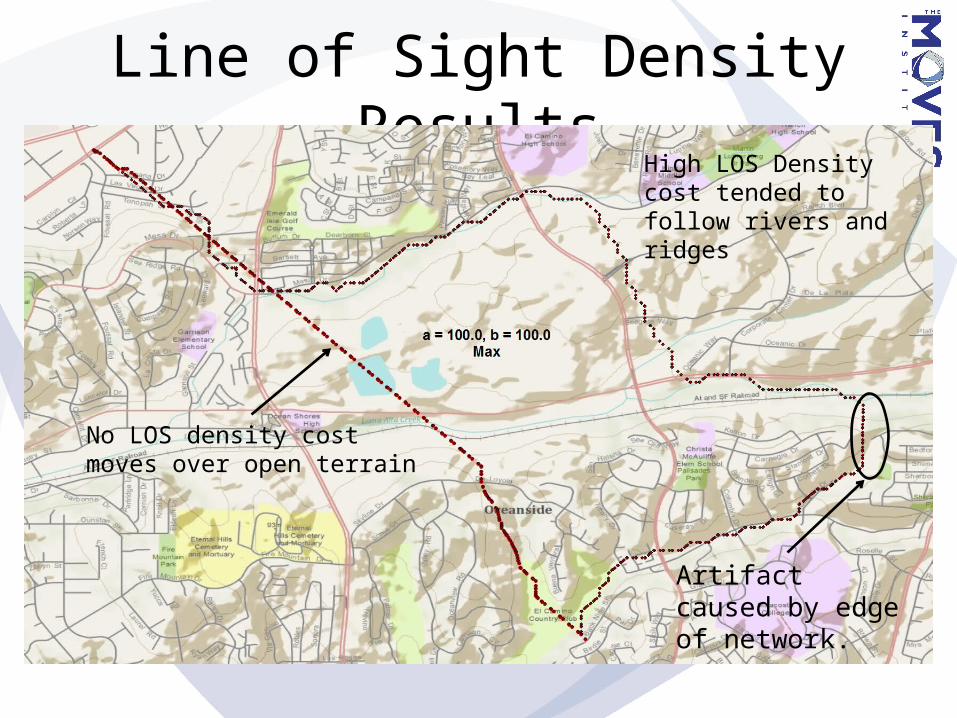
Line of Sight Density Results
No LOS density cost moves over open terrain
High LOS Densitycost tended to follow rivers and ridges
Artifact caused by edge of network.
Outline: Three Methods
• Concealed routes• Pre-cached approximate LOS• Hierarchical threat maps

Point Based Estimated LOS Accuracy• Used coarse grid of nodes to approximate true LOS• Tested to compare accuracy of estimated LOS to
actual LOS.– 16.4 km2 box in Camp Pendleton, 50m node spacing, about
3% covered with buildings.• False positives 0.1% / False negatives 5.0%• Processing about 35% faster.
– 1.7 km2 box in flat fictitious terrain, 20m, about 40% covered with buildings.
• False positives 1.0% / False negatives 2.0%• Processing about 25 times faster.
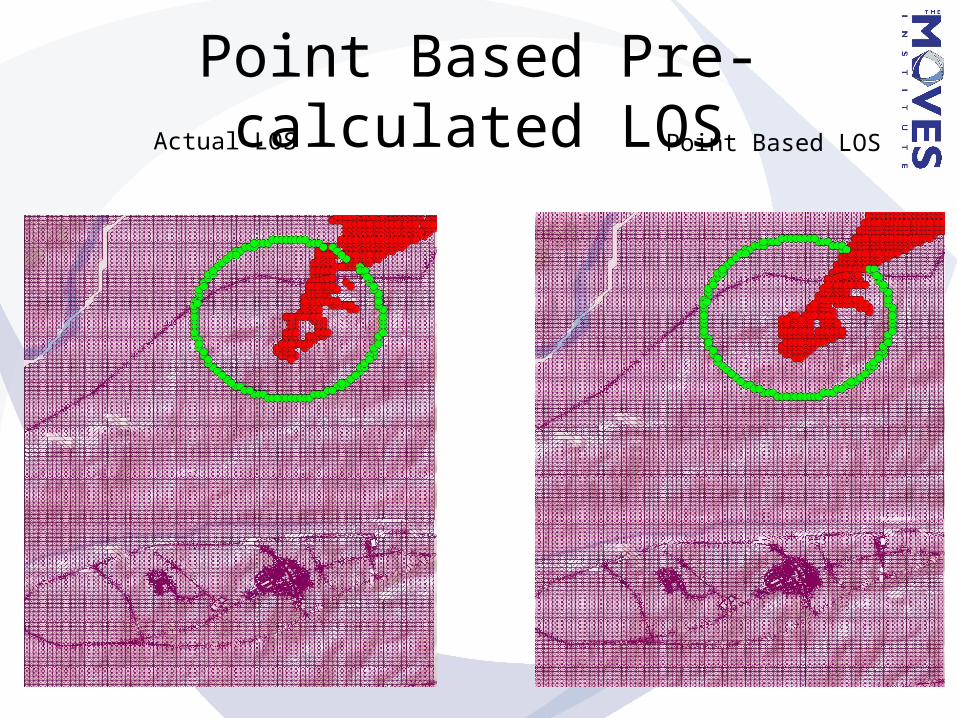
Point Based Pre-calculated LOSActual LOS Point Based LOS
Outline: Four Methods
• Concealed routes• Pre-cached approximate LOS• Hierarchical threat maps
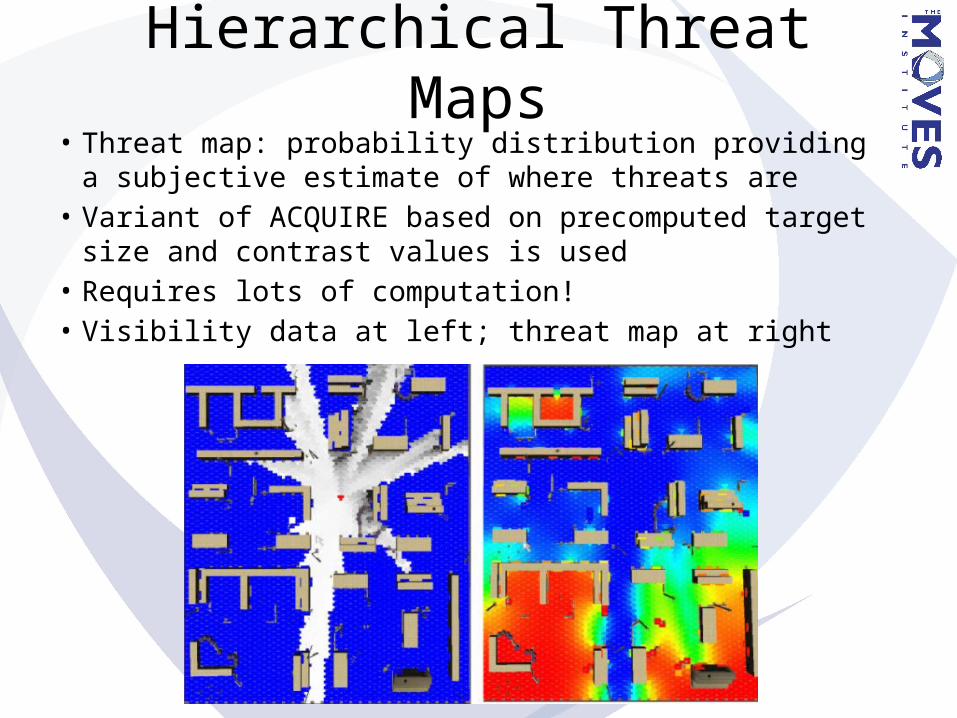
Hierarchical Threat Maps• Threat map: probability distribution providing a subjective
estimate of where threats are• Variant of ACQUIRE based on precomputed target size and
contrast values is used• Requires lots of computation!• Visibility data at left; threat map at right
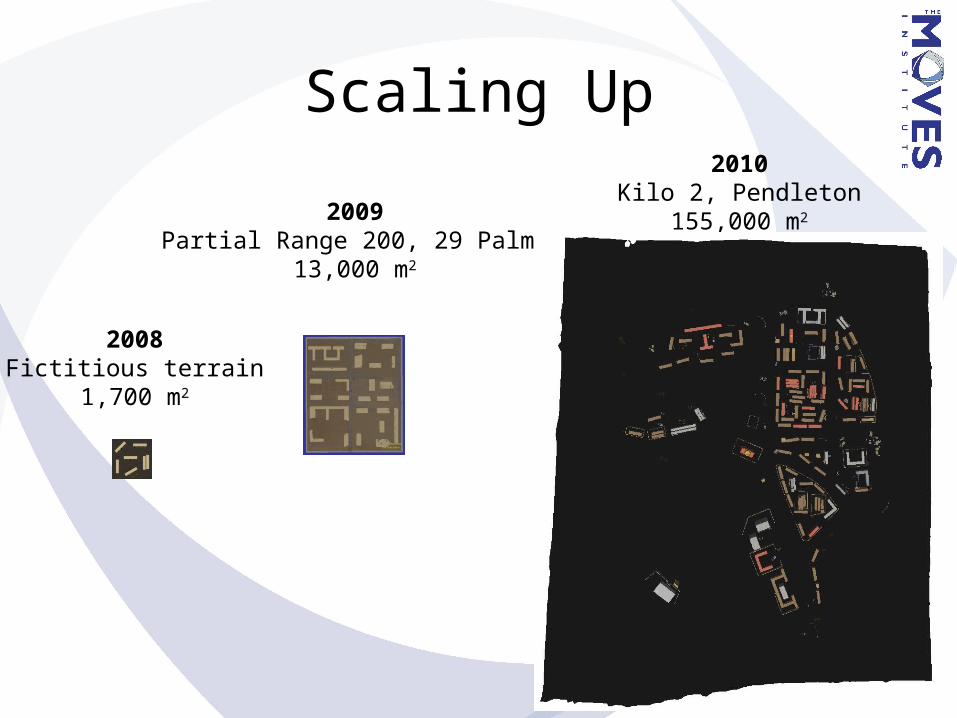
Scaling Up
16
2008Fictitious terrain
1,700 m2
2009Partial Range 200, 29 Palms
13,000 m2
2010Kilo 2, Pendleton
155,000 m2
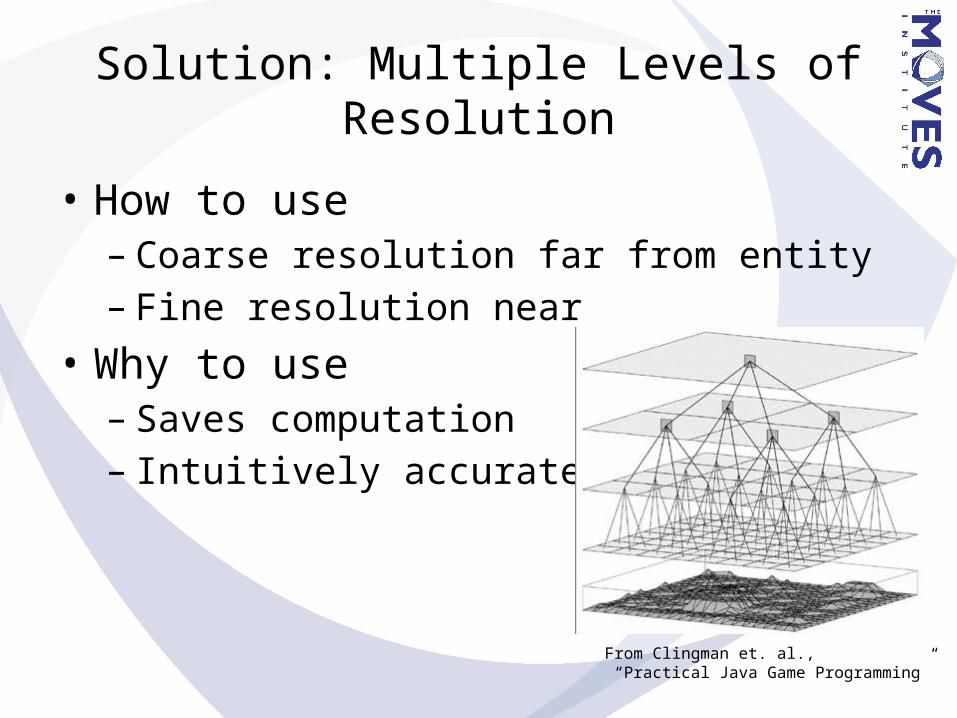
Solution: Multiple Levels of Resolution
• How to use – Coarse resolution far from entity– Fine resolution near
• Why to use– Saves computation– Intuitively accurate
From Clingman et. al., “Practical Java Game Programming”

Fireteam 1’s Threat Model

Fireteam 2’s Threat Model
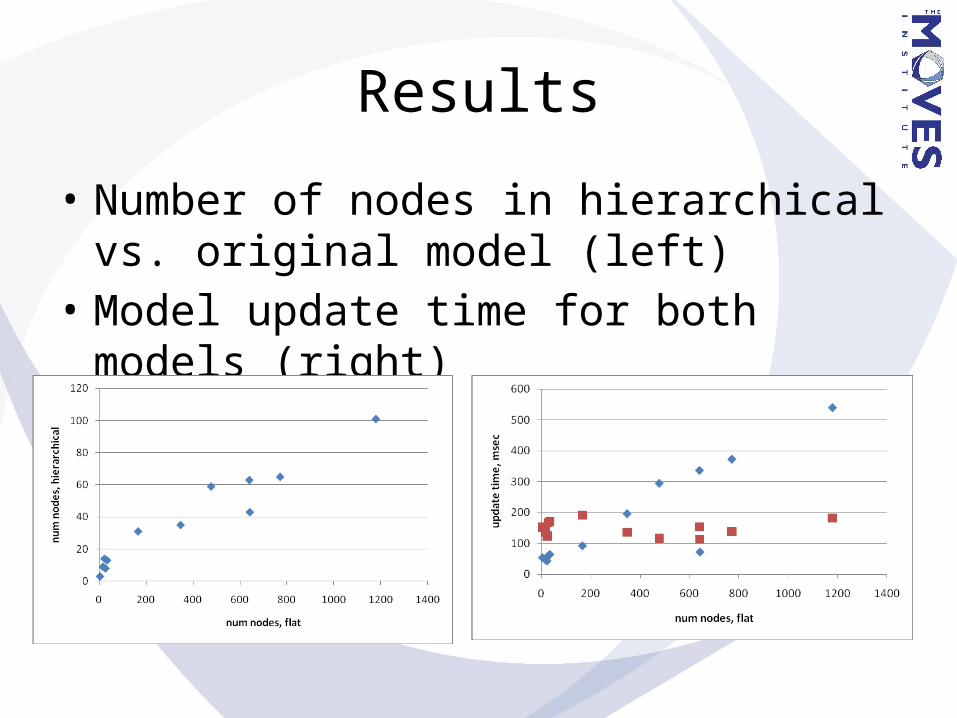
Results
• Number of nodes in hierarchical vs. original model (left)
• Model update time for both models (right)
Conclusions
• Representations for concealed movement planning, visual search, and threat location have been presented
• Precomputation and muti-resolution spatial data structures make the techniques practical
• All have been prototyped either in Combat XXI (TRAC) or the BASE-IT (ONR) prototype sims
• Much work remains to be done, both towards validation and obvious extensions of the models

22
From 2004
Problem: Nearly Blind Agents
It Seems That We’re Always Missing Something…
• Cover– Lacked obstacle info
• Target detection– Lacked exposed surface and contrast info
• Threat Location/Visual search– Lacked both above plus shooting position info
…So Why Not Give Just Agents Everything We Give a Human User?
Questions?







