
SEISMIC SOIL-STRUCTURE INTERACTION RESPONSE OF INELASTIC STRUCTURES
Sittipong Jarernprasert, Enrique Bazan-Zurita
Paul C. Rizzo Associates, Inc., Pittsburgh, PA 15235 Jacobo Bielak
Carnegie Mellon University, Pittsburgh, PA 15213 Dedicated to José M. Roësset; scholar, teacher and friend
SUMMARY
We analyze the effects of soil-structure interaction (SSI) on the response of yielding single-story structures
embedded in an elastic halfspace to a set of accelerograms recorded in California and to a set of records
from Mexico City. We find that, for nonlinear hysteretic structures, SSI may lead to larger ductility
demands and larger total displacements than if the soil were rigid. This behavior differs from that
envisioned in current seismic provisions, which allow designers to ignore SSI altogether or to reduce the
base shear force with respect to that of the fixed-base structure. To overcome this deficiency, we examine
an approach to incorporate SSI in determining the seismic design coefficient, yC~ , of systems with non-
structural degrading elastoplastic behavior and target ductility μt. In this approach, yC~ is obtained as the
unreduced seismic coefficient, C, of an equivalent fixed-base structure with natural period T~ , the natural
period of the elastic SSI system, and with inelastic reduction factor equal to the λ-root of the fixed-base
reduction factor, where λ = TT~ , and T is the elastic natural period of the structure ignoring SSI. The
peak relative displacement of the structure can be evaluated as the yield displacement yu~ times the target
ductility μt. The peak total displacement, including SSI, is closely approximated by yu~ (μt + λ2 – 1).
Keywords: seismic response, seismic design, seismic analysis, inelastic structure, inelastic
response, soil-structure interaction
1. INTRODUCTION
Current seismic design provisions allow engineers to completely ignore the effects of soil-
structure interaction in the seismic analysis of buildings, or to consider them by reducing the
design base shear of the fixed-base structure (e.g., ASCE [1]; NTDF [2], NEHRP [3]). A
discussion of the SSI prescriptions of NEHRP has been presented by Stewart et al [4]. These
provisions are based on analyses of simple linear, viscously damped, structures subjected to
transient or steady-state excitation (e.g., Bielak [5]; Jennings and Bielak [6]; Veletsos and Meek
[7]; Luco [8]; Roesset, [9]), and reflect the observation that interaction produces an elongation of
the fixed-base natural period and dissipation of part of the vibrational energy of the building by
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

2
wave radiation into the foundation medium (in addition to energy losses from internal friction in
the soil). The increase in period results in an increase of the seismic coefficient on an ascending
branch of the response spectrum, no change on a flat portion, and a decrease in a descending
branch. In addition, the energy dissipated in the foundation will usually increase the effective
damping, and, therefore, tend to decrease the spectral ordinate. Past studies show that for linear
systems, the effects of soil-structure interaction are, on balance, beneficial, and are the basis for
allowing a reduction in the base shear in seismic design provisions.
While linear analysis provides valuable insight into the response to earthquake excitation,
most real structures behave nonlinearly, particularly for the seismic intensities implied in design
spectra. In contrast to the extensive work devoted to date to linear SSI, less attention has been
given to nonlinear structural and soil behavior in SSI studies. Among these studies, earthquake
response of building-foundation systems with elastoplastic soil behavior has been studied by
Isenberg [10] and Minami [11]. Kobori et al [12] and Inoue et al [13] considered, in addition,
elastoplastic structures, but restricted their attention to lateral displacements of the base mass.
Veletsos and Verbic [14] studied the response of single-story elastoplastic structures on an elastic
halfspace to a simple pulse and found that the differences between the spectra obtained
considering SSI and the associated nonlinear fixed-base systems are significantly smaller than
those for elastic structures, the differences decreasing with increasing ductility ratio. In a study of
the steady-state response of a simple bilinear hysteretic structure supported on an elastic
halfspace, Bielak [15] found that, contrary to linear systems, SSI can cause the resonant
amplitude of the response of the hysteretic structure to increase over that for a rigid foundation.
The same general behavior has been observed more recently by Mylonakis and Gazetas [18], and
by Avilés and Pérez-Rocha [19]. The latter have proposed a simple fixed-base replacement
oscillator approach using an effective ductility, together with the known effective period and
damping of the system for the elastic condition, to account for the interaction effects of the
coupled system.
In this paper, we examine the response of single-story inelastic structures, with a foundation
embedded in an elastic halfspace, with a view towards (a) assessing the importance of SSI effects
in yielding structures; (b) evaluating current seismic design provisions for taking these effects
into consideration; and (c) developing an approach for the seismic design of SSI systems and to
calculate the corresponding nonlinear structural displacement.
As seismic input we selected two ensembles of earthquake records, corresponding to two
different geological settings: The first consists of 87 accelerograms recorded in California at sites
ranging from hard to medium hard, with a few soft sites. The second set comprises 66 records
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

3
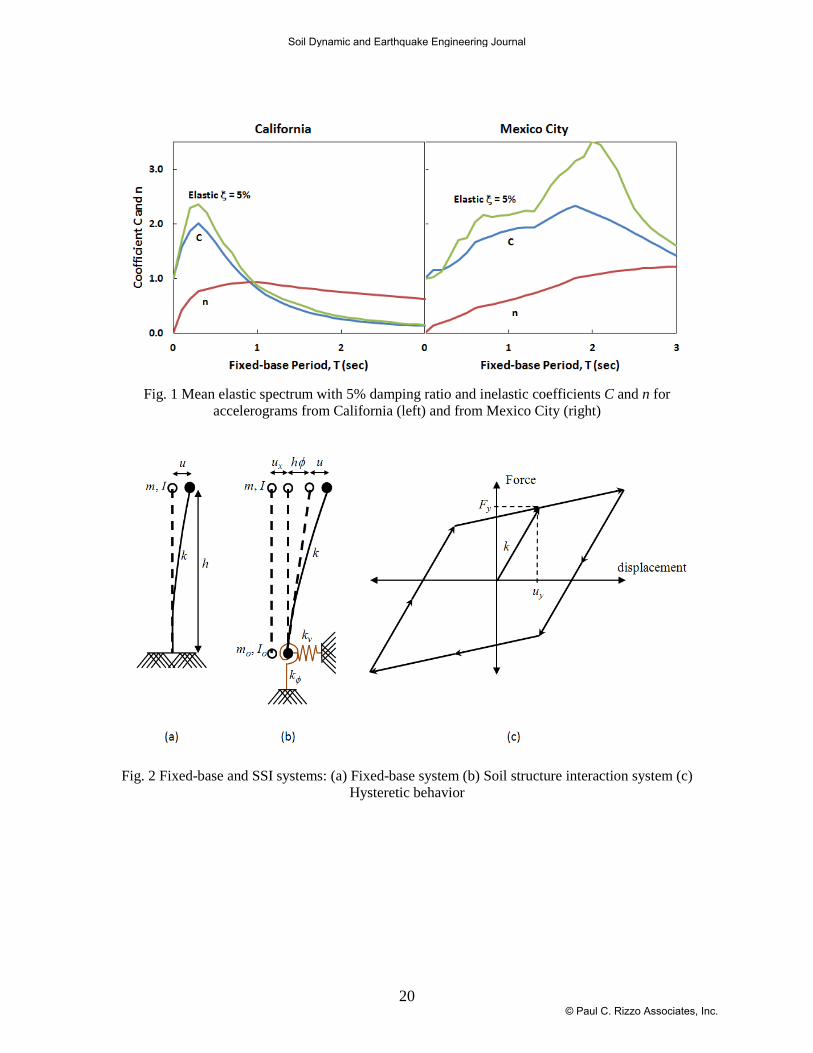
from the soft lakebed of Mexico City. The records are normalized to have the same Arias
intensity and also with respect to the mean peak ground acceleration, PGA , and have the average
5 percent damped elastic spectra presented in Fig.1. These numbers of records and their
normalization result in smooth average spectra. Inelastic spectra are even smoother (Jarernprasert
et al [20]), enabling us to examine code specifications that prescribe design spectra and inelastic
reduction factors that exhibit smooth variations with period. The source, geological settings and
site conditions are reflected in the periods where the peak spectral ordinates occur at 0.3 s for the
California records and at 2.0 s for the Mexican accelerograms.
Before examining the behavior of inelastic structures on flexible foundations, in the following
two sections we summarize two related cases that serve as the points of departure for our study:
1) an inelastic structure on a fixed base, and 2) an elastic structure with a flexible base (elastic
SSI system).
2. PRIOR STUDY OF INELASTIC STRUCTURES ON A FIXED-BASE
The single-story structure supported on a fixed base shown in Fig. 2, was examined
previously by the authors. The structure has an elastic period T and non-degrading bilinear
hysteretic behavior defined by a yield displacement, uy, and slope of the second branch of the
skeleton force-displacement relationship assumed to be 2 percent of the initial slope, also shown
in Fig. 2. The seismic coefficient is defined as Cy = Vy /W, in which Vy = k uy, with k = m (2π/T).
k is the stiffness of the structure, m its mass, Vy is the base shear, and W = mg, the weight of the
structure.
Jarernprasert et al [20, 21] found that the value of Cy that results in an average ductility
demand, µ , corresponding to the two set of earthquakes base motion can be closely estimated as
)(/)(),( TnTCTyC µµ = (1)
The two quantities C and n depend only on the elastic natural period, T. C(T) differs
somewhat from the elastic spectrum and can be interpreted as a pseudo-elastic design spectrum
corresponding to µ = 1. The denominator )(TnR µ= constitutes a reduction factor that accounts
for inelastic energy dissipation. Close forms for C and n for the two sets of earthquakes records
considered herein are given in [20].
3. SEISMIC RESPONSE OF ELASTIC SSI SYSTEMS
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

4
Procedures for taking SSI into consideration in the seismic design of buildings are based
primarily on studies of the response of single-story elastic models as the one illustrated in Fig. 2,
where the impedance of the foundation and surrounding soil is represented by translational, kv,
and rotational, kφ, elastic springs and their associated viscous dampers. Following Jennings and
Bielak [5], the SSI fundamental period, T~ , can be closely estimated as:
φk
khkk
TT
v
2
1~
++= (2)
Supertildes will be used throughout to denote quantities associated with the SSI system. h is
the effective height of the structure. Assuming that the fixed-base structure has 5 percent critical
damping, the effective damping ratio, β~ , of the SSI system is (Jennings and Bielak [5]):
3
~05.0~
+=
TT
oββ (3)
βo is the contribution to the effective damping ratio due to geometric scattering and intrinsic
damping in the soil, which depends on TT~ and h/r. With reference to the bearing area of the
foundation, r is the radius of the circle with the same area, for squatty buildings, or with the same
moment of inertia about a centroidal axis perpendicular to the direction of the motion, for slender
buildings. The second term is the modified structural damping due to SSI.
The seismic design coefficient for the SSI system is obtained by entering into the fixed-base
spectrum with T~ . Due to the change in damping, this coefficient must be modified, because β~ in
general differs from 0.05. For instance, one may use the recommendation of Arias and Husid [22]
by scaling the original spectrum by the factor (0.05/ β~ )0.4.
Now, let the ratio TT~ be denoted by λ. Then:
T~ = λT (4)
305.0~ −+= λββo
(5)
In this study, we take λ to vary between 1.1 and 1.5, and take the slenderness ratio H/B equal
to 2, where H is the total height of the structure, and B is the base dimension of the foundation,
considered to be square. We have taken r = B/1.75, and h = 0.7H. To calculate kv, kφ, and the SSI
damping ratios we use formulas by Gazetas [23] and NEHRP [3]. Details are provided in
Appendix B. In addition, only ground motion in one horizontal direction is investigated and we
consider only inertial interaction. As indicated by Avilés and Pérez-Rocha [24], kinematic
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

5
interaction is not as significant as inertial interaction for typical building-foundation systems and
geological settings.
Having completely specified the SSI system for a prescribed value of λ = TT~ , we could
calculate its response for different periods T and different value of λ, for the two sets of
excitations. We interpret λ as a metric of the amount of interaction in the system. The mean
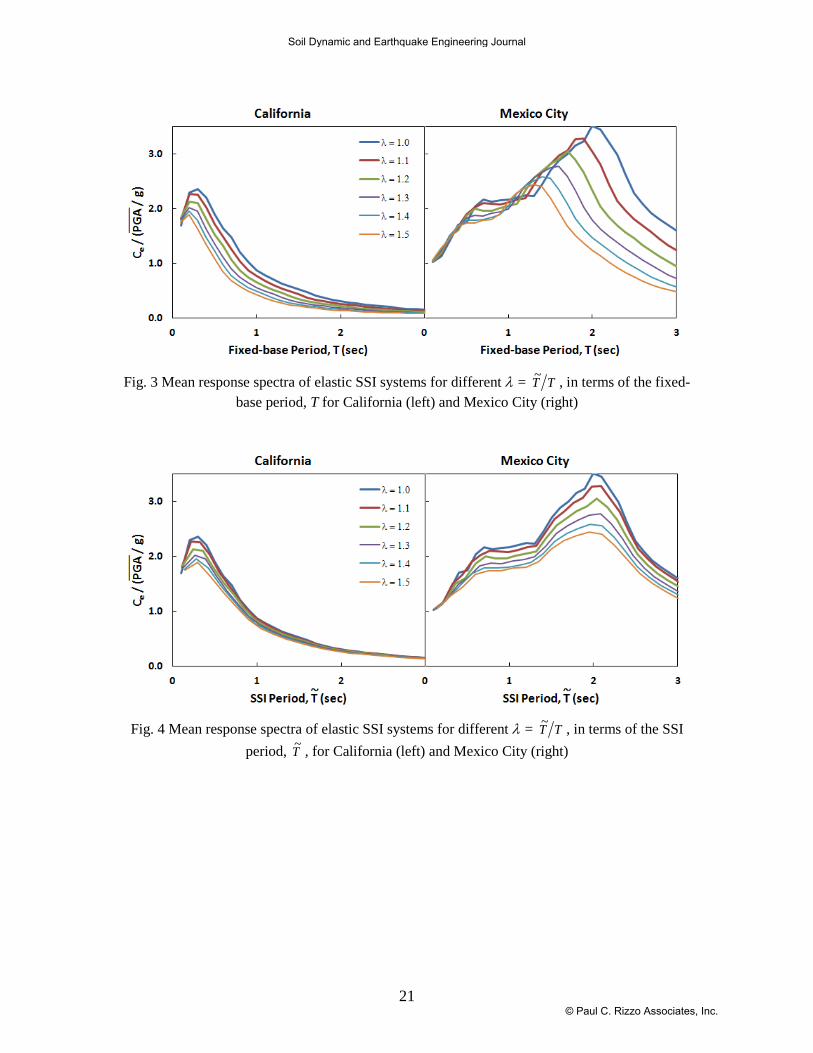
elastic seismic coefficient, WeVeC /= , is shown in Fig. 3. eV is the mean base shear force of
the elastic structure. The left panel of Fig. 3 corresponds to the California accelerograms and
shows that, practically for all periods, an increase in λ reduces the base shear with respect to the
fixed-base case (λ = 1). In addition, the slight shift of the peak spectral value towards the left
reflects the increase in the effective natural period of the SSI system. The right panel displays
the average spectra obtained with the Mexican records, which show that increasing λ reduces the
shear force for fixed-base periods greater than the dominant period of 2 sec and for periods lower
than 1 sec. For intermediate periods, the response shows a small increase.
Figure 4 displays the same spectra as in Fig. 3 but with the SSI period, T~ , in the abscissa.
This display shows clearly that the peak shear forces for different values of λ are all aligned and
occur at a period T~ equal to the dominant period of the seismic input. For all periods, smaller
spectral values are obtained as the flexibility of the soil increases, thus reflecting the effect of the
SSI damping.
4. SEISMIC RESPONSE OF SSI SYSTEMS WITH INELASTIC STRUCTURES
With the previous preamble, we now proceed to study again the earthquake response of the
SSI systems studied in the previous section, but considering now that the structure in Fig. 2
exhibits the hysteretic behavior depicted in the same figure. The need for this study is attested by
the example presented in Appendix C which shows that the base flexibility can increase the
ductility demand on the superstructure.
The seismic coefficient is now defined as yC~ = yV~ /W, where yV~ = k yu~ is the structure yield
force. Values of yC~ that lead to a prescribed average ductility are determined as follows:
• Select λ and a target ductility demand µt;
• For each fixed-based period, T, and prescribed λ, define the properties of the elastic SSI
system as described in Appendix B;
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

6
• For a given set of records, find the minimum yC~ for which the response of the
superstructure remains elastic for all records;
• Progressively reduce yC~ and set the yield displacement as:
yu~ = yV~ /k = W yC~ /k = yC~ T 2 g / (2π)2 (6)
• For each yC~ and each earthquake record, solve numerically the nonlinear differential
equations of motion of the system. Obtain the maximum relative displacement of the
structure, umax, and the resulting ductility demand, µ = umax/ yu~ ; μ can be less than unity;
• Calculate the mean µ from the results for all the records in the set, assuming that µ has a
lognormal distribution, as explained by Jarernprasert [21];
• By interpolating between closely spaced values of yC~ , determine yC~ such that µ equals
µt. Whereas for an individual earthquake record the relationship between µ and yC~ is
not necessarily unique (e.g., see Chopra, [25], p.256), we found a one-to-one
correspondence between yC~ and µ .
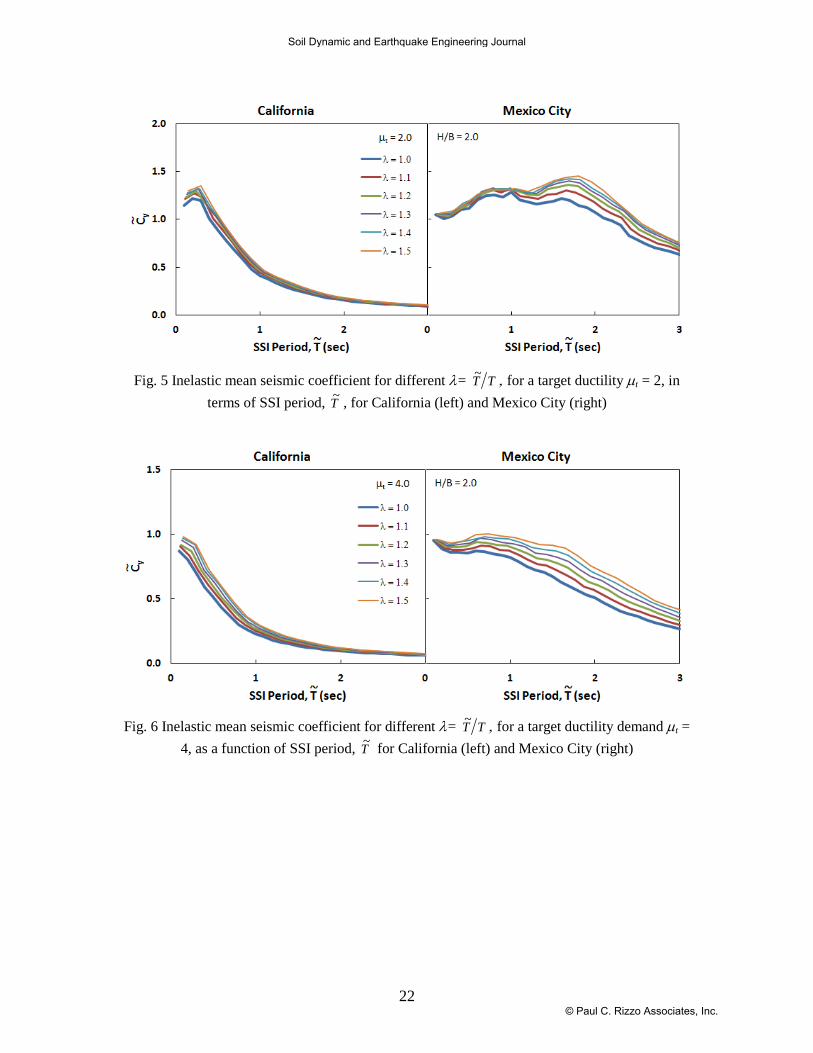
In all SSI systems we consider H/B = 2.
Figure 5 shows yC~ when µt equals 2, for λ between 1 (fixed-base case) and 1.5, as a function
of the SSI-period T~ . For a given period, the seismic coefficient yC~ increases as the SSI effects,
as measured by λ = TT~ , increase. This behavior, opposite to that exhibited by elastic SSI
systems, indicates that as the soil becomes softer, the structure deforms less and dissipates less
energy than when the soil is stiffer. The additional energy dissipated in the soil is not sufficient to
compensate for the reduced hysteretic energy in the superstructure. Thus, there is a need for a
higher yC~ to maintain µt = 2 as λ increases. The spread of spectral values is most pronounced
where the SSI period equals the dominant period of the input set of earthquake records
(approximately 0.3 sec for the California set and 2.0 sec for the Mexico City set). Also, the
peaks of the spectra shift slightly to the right for increasing λ, as a consequence of the lengthening
of the effective natural period of the superstructure caused by its inelastic behavior.
Figure 6 shows again yC~ in terms of T~ , but now for a target ductility demand of 4. Again,
yC~ increases with λ, but this time the peaks for SSI periods are significantly flatter, revealing that
just as for fixed-base systems, increasing inelastic behavior in the structure tends to eliminate the
peaks that characterize elastic spectra.
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
7
5. EVALUATION OF CURRENT SEISMIC SSI PROVISIONS
In contrast to the result in the preceding section, building codes generally allow (1) a
reduction of the overall seismic coefficient on account of SSI, or (2) SSI effects to be ignored. In
this section we examine these two courses of action on the ductility demand. First, we study the
option of reducing the seismic coefficient for a set of fixed-based periods, T, by means of the
following steps for each T:
• Select the ratio of SSI period to fixed-base period, λ = TT~ , of the system, and a target
ductility µt;
• Calculate T~ = λT and the increased damping ratio of the equivalent linear oscillator, β~ ,
e.g., with (3);
• Reduce the elastic fixed-base seismic coefficient at the period T. We use the
prescriptions of ASCE 7-10 [1] which account for reductions due to elongated period T~
and for the increased damping ratio β~ .
• To incorporate the nonlinear structural effect, calculate the fixed-base inelastic reduction
factor, )(TntR µ= which leads to a mean ductility demand µt in the fixed-based system;
• Apply R to reduce the elastic fixed-base seismic coefficient;
• Analyze the SSI system, and calculate resulting the mean ductility demand.
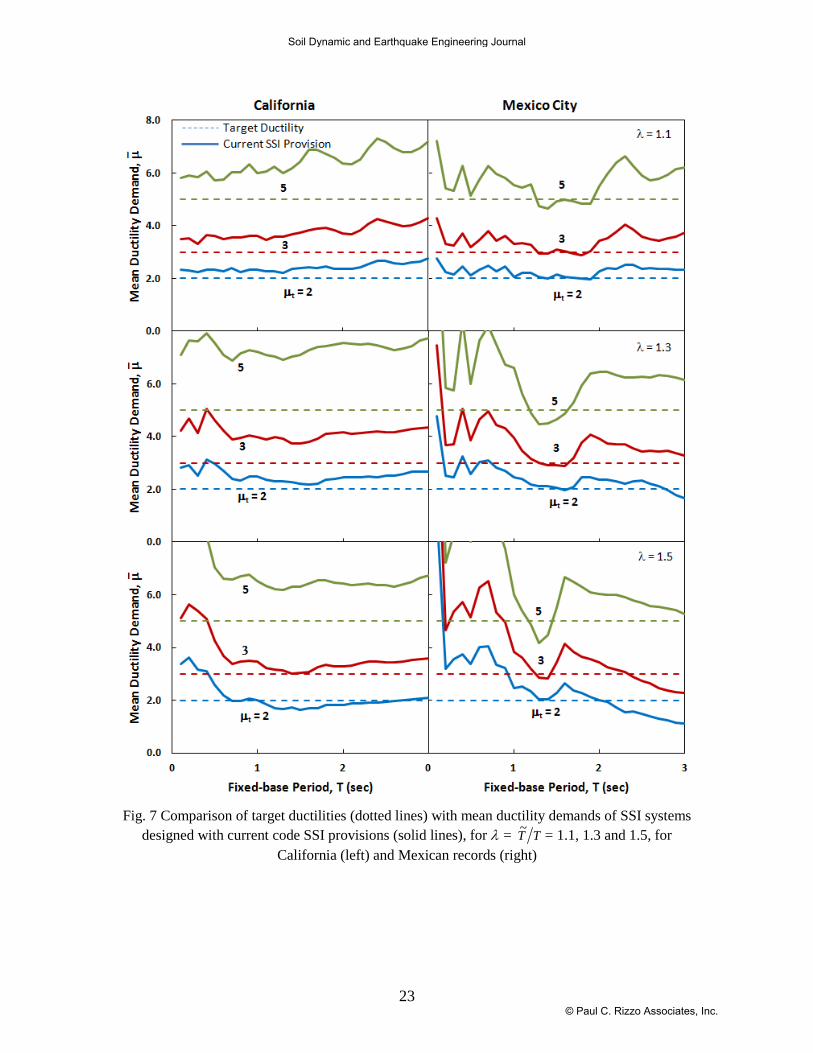
In Fig. 7 we compare, for different values of λ, the target ductility µt, shown with dashed
lines, against the actual calculated ductility mean demands, µ , displayed as continuous lines. We
find that these SSI provisions lead to excessive ductility demands, especially at lower periods, for
all target ductilities. In addition, this figure shows that reducing the seismic coefficient for SSI, as
presently allowed in seismic provisions, can lead to excessive ductility demand compared to the
corresponding target ductility. For both sets of earthquakes, the discrepancy increases as λ
increases.
Next we study the option in which the effects of SSI are ignored in selecting the seismic
coefficient, which is calculated directly using the original fixed-base period and structural
damping of 0.05. The reduction factor is also the same as for fixed-base, in our case, R = µtn(T).
The corresponding mean ductility demand is presented in Fig. 8 and indicates that ignoring SSI is
beneficial for long-period structures, but detrimental for short-period systems. Nonetheless, the
departures from the target ductility ratios are much smaller than in Fig. 7, showing that between
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

8
the two choices contemplated in current codes, it seems preferable for nonlinear structures to
ignore SSI than to allow a reduced base shear.
6. SEISMIC COEFFICIENT OF SSI SYSTEMS WITH INELASTIC STRUCTURES
In this section we devise a procedure to calculate the inelastic seismic coefficient for the SSI
systems under consideration that maintains the target ductility demand as the key parameter, by
extending the methodology developed by Jarernprasert et al [21] for inelastic fixed-base
structures. By maintaining the ductility as the defining parameter, we emphasize that, even if the
reduction factor introduced to consider structural inelastic behavior changes on account of SSI,
the structural design and detailing requirements, controlled by the ductility demand, remain the
same as in the original fixed-base system.
6.1 Seismic Coefficient
While calculating the mean ductility demand, µ , we observed that the logarithm of µ varies
linearly with the logarithm of the seismic design coefficient, yC~ , for a wide range of µ . For
instance, Fig. 9 shows log µ vs. log yC~ for λ = 1.3 and several values of T for the California and
the Mexico records. Our approach for estimating the seismic coefficient stems from this
observation. From Fig. 9 and similar ones for different values of λ one can write:
log yC~ = log C − n~ log µ ; 1.5 ≤ µ ≤ 6.0 (7)
or
),~(~),~(~),,~(~ λµλλµ TnTCTyC −= ; 1.5 ≤ µ ≤ 6.0 (8)
),~(~ λTC is the intersection of each straight-line approximation for yC~ vs. µ with the horizontal
axis µ = 1 and – ),~(~ λTn is its negative slope. Since T and T~ are related through λ, we can
express yC~ and as functions of T~ rather than T. ),~(~ λTC and ),~(~ λTn are determined by
regression of yC~ on µ for different values of T~ , similar to those shown in Fig. 9. It should be
emphasized that ),~(~ λTC is not the mean elastic spectrum corresponding to the SSI period T~ = λ
T. Both C~ and were obtained by regression on calculated inelastic results for yC~ and µ .
),~(~ λTC has been plotted in Fig. 10 as a function of the SSI natural period for different
values of λ, for both sets of earthquakes. This figure shows that C~ is practically independent of
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

9
λ. Thus, we can approximate ),~(~ λTC by C( T~ ), the unreduced seismic coefficient for fixed-base
system (λ = 1) , i.e.:
),~(~ λTC ≈ C(T~ ) (9)
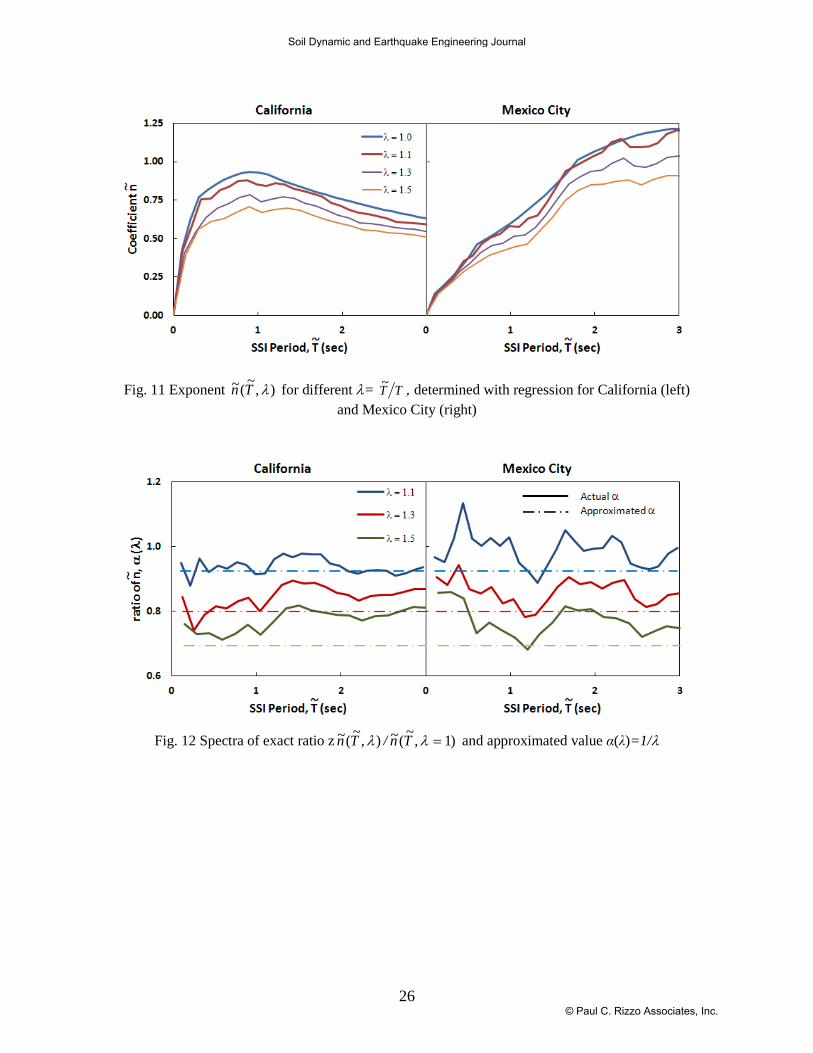
The exponent (T~ , λ) in (8), and similar ones for other values of λ, are plotted in Fig. 11,
which shows that is a decreasing function of λ, and vanishes for T~ = 0. This implies that
),(0,~ λµyC = C(0, λ), and since C(0, λ) = PGA /g, the condition that a ),(0,~ λµyC must be
equal to PGA /g is satisfied.
Since ),~(~ λTn decreases for increasing λ, (8) implies that for a prescribed µ , yC~ also
increases with λ, i.e., yC~ is larger for softer than for stiffer soils. To assess the effects of T~ and λ
on separately, it is useful to express the exponent ),~(~ λTn as the product:
),~(~ λTn = n(T~ ) α(λ) (10)
in which n(T~ ) is the limit of ),~(~ λTn for a fixed-base system (λ = 1), evaluated at the SSI
period T~ . The factor α(λ) accounts for the effect of λ. We use the results of Fig. 11 to obtain
α(λ), by dividing ),~(~ λTn by )1,~(~ =λTn . Observing that this ratio varies weakly with T~ , α(λ)
can be approximated as:
( ) ( )( ) λλ
λλα
11,~~
,~~≈
==
TnTn , 1 ≤ λ ≤ 1.5, (11)
The actual ratio α(λ) and its approximation 1/λ are shown in Fig. 12. Almost everywhere the
latter is smaller than the former. Since a smaller α(λ) yields a higher seismic coefficient, 1/λ
provides a conservative value of the seismic coefficient. With the approximations (9), (10) and
(11), the expression (8) for yC~ becomes:
( ) ( )( )λµ
λµ,,~~
~,,~~
TRTC
TyC = (12)
where
( )
=
λµλµ
1~
,,~~ TnTR (13)
Substituting from (1), this expression may be also written as:
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

10
( ) ( )
−=
λλ
µ
µλµ 1~
,~,,~~
Tn
TCTyC (14)
This expression indicates that in order to obtain the seismic coefficient of the SSI system with
a natural period T~ and a period elongation ratio λ it suffices to divide the seismic coefficient of a
rigid-base structure with the natural period T~ and a mean ductility demand µ by the factor
−
λλ
µ1~Tn
.
To assess the accuracy of (14) for determining the seismic coefficient, yC~ , of the SSI system
with a target ductility demand µt, we first obtained the “exact” value of yC~ from regression of
nonlinear analyses results obtained directly from the solution of the governing equations of the
system. Then we applied (14) to estimate yC~ . Results of the two approaches for different values
of λ and µt are plotted in Fig. 13. The difference between the two sets of curves is small. This
means that (14) provides a satisfactory estimate of yC~ for the two ensembles of earthquake
records, for all values of the target ductility, and for all ratios TT~ .
It is of considerable practical interest that (14) holds for the two very different sets of
earthquake records considered in this study. This indicates that a simple rule of the type embodied
in (11) might be applicable to other seismic regions.
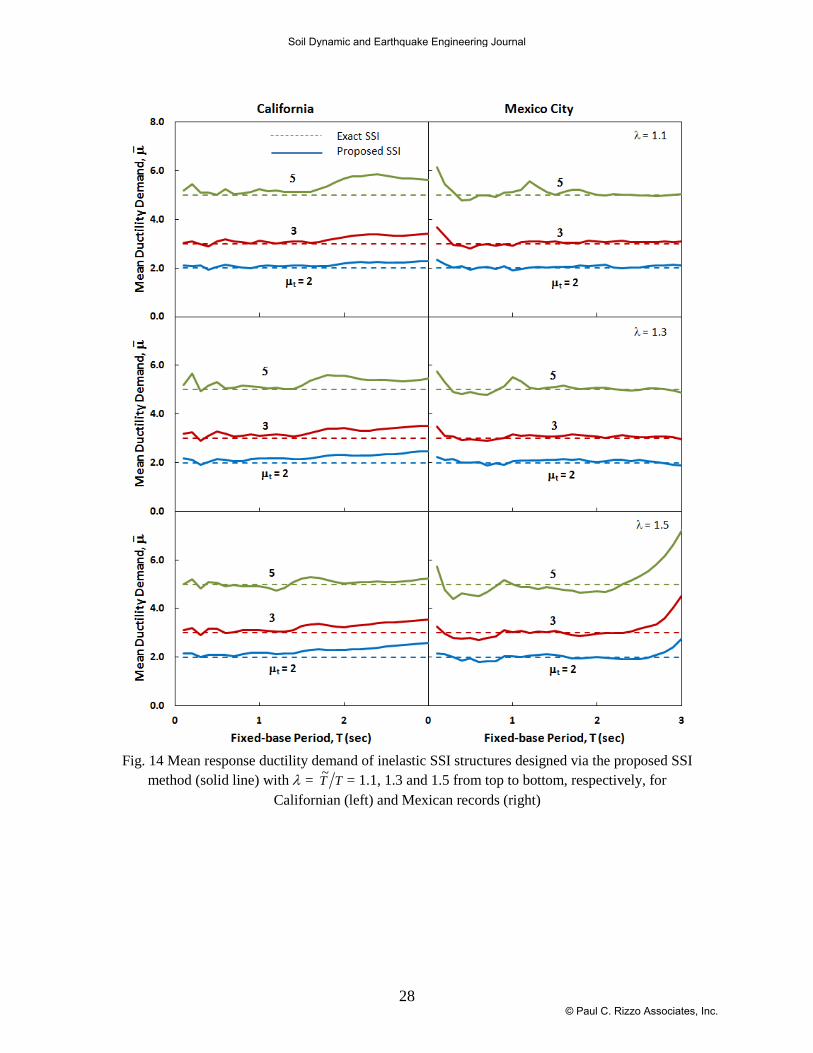
As a further test of the accuracy of (14), Fig. 14 shows the actual mean ductility demand µ of
SSI systems whose strength is evaluated from this expression, for a prescribed target ductility μt.
The values of µ are in close agreement with μt, except for long period systems and λ = 1.5 in
Mexico City. In practice, such a large interaction ratio is unlikely for long period structures,
because they are built on pile foundations, which tend to increase the relative stiffness between
the foundation and the structure.
6.2 Structural Displacements
Having established a simple procedure for determining the SSI seismic design coefficient yC~ ,
and thereby the yield displacement via (6), the maximum mean relative displacement of the
inelastic superstructure, maxu , can be approximated consistently within this approach as the yield
displacement times the mean ductility demand µ . That is:
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

11
( )2π
µµ
2~
2
maxgTC
uu yy
⋅== (15)
With maxu known, the mean total displacement, totalu , of the mass of the structure with
respect to the free-field motion of the base can be estimated approximately as:
φhuuu xtotal ++= max (16)
xu is the mean relative horizontal displacement of the foundation with respect to the free-field
displacement and φ is the mean angle of rocking of the foundation. Using the assumption that
the foundation remains elastic, with horizontal and rocking stiffness kx and kφ, xu and φ are:
x
yx k
Vu
~= (17)
φ
φk
Vhh y
~2 ⋅= (18)
Substituting (13), (15) and (16) into (14), the total displacement becomes:
kV
kkh
kk
kVh
kV
kV
u y
xt
y
x
yyttotal
~~~~ 22
⋅++=
⋅++=
φφ
µµ (19)
Now, because yV~ /k = yu~ , the above equation can be rewritten as:
( )
⋅+++−=
φ
µk
khkkuuux
ytytotal
2
1~1~ (20)
From (2), the terms inside the second parenthesis are equal to the square of λ; thus:
( )1~ 2 −+= λµ tytotal uu (21)
Equation (21) allows one to compare the relative effect of the target ductility to that of the
flexibility of the soil on the total displacement of the structure. The ratio of the approximate mean
total relative displacement evaluated with (21) to the exact value obtained by solving the
nonlinear equations of motion has been calculated for different values of λ and μt. The results
presented in Fig. 15, indicate that the maximum difference between the approximate and exact
solutions is 10 percent and occurs for λ = 1.5 and µt = 5, for the Mexican records. For the
California records the discrepancy is less than 5 percent for any combination of λ and μt.
7. CONCLUDING REMARKS
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

12
In this study of the SSI response of inelastic structures to two very different sets of
earthquake records, we have first confirmed that for the simple linear systems considered in this
study, SSI mostly leads to a reduction of the mean response with respect to that of the
corresponding fixed-based structures. By contrast, a bilinear hysteretic structural behavior results
in an increase of the mean ductility demand with respect to that of the corresponding fixed-base
structure if the natural period of the system is smaller than the dominant period of the excitation
at the site, and in a decrease otherwise.
Based on these observations, we developed a simple procedure for estimating the SSI seismic
coefficient, yC~ , such that the ductility demand of the structure remains close to the target
ductility. In particular we derived an expression for yC~ as the product of the seismic coefficient
for the structure on a fixed-base structure divided by a factor that incorporates the SSI effects.
This result suggests that the seismic design coefficient can be determined from expression
(14). One only needs to replace the mean ductility demand µ by the target ductility, µt. In
practice, building codes stipulate a reduction factor R associated with the inelastic behavior of the
fixed-base structure. To incorporate SSI with our approach one would use a smaller reduction
factor ( )tTR µλ,,~~ equal to λλµ /)1)(~( −TntR .
The proposed approach can be used for rapidly assessing the importance of SSI effects on the
dynamic behavior of the building-foundation system, by comparing the seismic response
coefficient or, perhaps better yet, the resulting drift or peak structural displacement, with the
corresponding fixed-base quantities.
The results presented in this paper correspond to a structural aspect ratio, H/B = 2; we have
also analyzed SSI systems with H/B = 4, obtaining very similar qualitative results. The impact of
H/B is properly considered in the calculation of period elongation ratio λ. The proposed approach
has been developed for a particular class of SSI systems; while it is reasonable to expect that the
key equation (10) will apply to other foundation conditions, e.g., piles, and soil stratigraphy, the
procedure should be additionally verified before applying it to systems whose structural behavior
differs widely from the bilinear hysteretic considered here. It is also well to emphasize that only
inertial interaction has been considered in this study. Kinematic interaction should be included if
the dominant length of the incident waves is of the same order as the base (or depth) dimension of
the foundation.
ACKNOWLEDGMENTS
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
13
This research was partially supported by the National Science Foundation Division of
Engineering Education and Centers under grant 01-21989. The authors are grateful for this
support. We also thank the reviewers for their constructive comments. They were very helpful in
revising the paper.
REFERENCES
[1] ASCE, ASCE 7-10 Minimum Design Loads for Buildings and Other Structures, American Society of Civil Engineers, 2010.
[2] NTDF, “Normas Técnicas Complementarias para Diseño por Sismo”, Gaceta Oficial del Distrito Federal , Mexico City, Mexico, 2004.
[3] NEHRP, NEHRP Recommended Provisions for Seismic Regulations for New Buildings and Other Structures. Part 1 – Provisions 2009 Edition; FEMA 750 CD.
[4] Stewart JP, Kim S, Bielak J, Dobry R, and Power MS. Revisions to Soil-Structure Interaction Procedures in NEHRP Design Provisions. Earthquake Spectra 2003; 19(3): 677-696.
[5] Bielak J. Earthquake response of building-foundation systems. Technical Report: CaltechEERL:1971.EERL-71-04, California Institute of Technology 1971; http://caltecheerl.library.caltech.edu/197/00/7104.pdf
[6] Jennings, PC, and Bielak, J. Dynamics of Building-Soil Interaction. Bull. Seism. Soc. Am.1973; 63 (1): 9-48.
[7] Veletsos AS and Meek JW. Dynamic behavior of building-foundation systems Earthquake Engineering and Structural Dynamics 1974; 3(2): 121-138.
[8] Luco JE. Linear Soil Structure Interaction, in Seismic Safety Margins Research Program (Phase I), U.S. Nuclear Regulatory Commission, Washington D.C., 1980.
[9] Roesset JM. “A review of soil-structure interaction,” in Soil-structure interaction: The status of current analysis methods and research, J. J. Johnson, ed., Rpt. No. NUREG/CR-1780 and UCRL-53011, U.S. Nuclear Regulatory Com., Washington DC, and Lawrence Lab., Livermore, CA., 1980.
[10] Isenberg J. Interaction between soil and nuclear reactor foundation during earthquakes. USAEC Report, ORO-3822-5, Agbabian-Jacobsen Associates, Los Angeles, California 1970.
[11] Minami T. Elastic-plastic earthquake response of soil-building systems. Proc. Fifth World Conference Earthquake Engineering, Rome, Italy 1973; 2080-2083.
[12] Kobori T, Minai R, and Inoue Y. On earthquake response of elasto-plastic structure considering ground characteristics. Proc. Fourth World Conference Earthquake Engineering, 3, Santiago, Chile, 1969: 117-132.
[13] Inoue Y, Kawano M, and Maeda Y. Dynamic response of nonlinear soil-structure systems. Technology Reports of the Osaka University1974; 24: 803-825.
[14] Veletsos AS and Verbic B. Dynamics of elastic and yielding structure-foundation systems. Proc. Fifth World Conference Earthquake Engineering, Rome, Italy 1973; 2610-2613.
[15] Bielak J. Dynamic Response of Non-Linear Building-Foundation Systems. Earthquake Engineering and Structural Dynamics 1978; 6, 17-30.
[16] Bazán-Zurita E, Díaz-Molina I, Bielak J, and Bazán-Arias NC. Probabilistic seismic response of inelastic building foundation systems. Proc. 10th World Conf. on Earthq. Engineering, Madrid, Spain1992; 1559-1565.
[17] Rodríguez M and Montes R. Seismic response and damage analysis of buildings supported on flexible soils, Earthq Engineering & Struct. Dyn 2000; 29: 647-665
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

14
[18] Mylonakis G. and Gazetas G. Seismic Soil-Structure Interaction: Beneficial or Detrimental? Journal of Earthquake Engineering 2000; 4(3): 377-401
[19] Avilés J and Pérez-Rocha LE. Soil-structure interaction in yielding systems. Earthquake Engineering and Structural Dynamics 2003; 32: 1749-1771.
[20] Jarernprasert S, Bazan E, and Bielak J. An Inelastic-Based Approach for Seismic Design Spectra. Journal of Structural engineering 2006; 132;, 1284-1292.
[21] Jarernprasert S. An inelastic design approach for asymmetric structure-foundation systems. Ph.D. Dissertation, Carnegie Mellon University, Pittsburgh, PA, 2005.
[22] Arias A and Husid R. Influencia del amortiguamiento sobre la respuesta de estructuras sometidas a temblor. (In Spanish), Rev. IDIEM 1962; Vol 1: 219-228.
[23] Gazetas G. (1991). Foundation Vibration. Foundation Engineering Handbook. H.-Y. Fang. Van Nostrand Reinhold, New York: Chapter 15.
[24] Avilés J and Pérez-Rocha LE 1996. Evaluation of interaction effects on the system period and the system damping due to foundation embedment and layer depth. Soil Dynamics and Earthquake Engineering 1996; 15(1): 11-27.
[25] Chopra AK. Dynamics of Structures, Theory and Applications to Earthquake Engineering, Prentice Hall, Upper Saddle River, New Jersey, 1995.
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
15
APPENDIX A Symbol Description
B Base dimension of the foundation C Pseudo-elastic spectrum of fixed-base system C~ Pseudo-elastic spectrum of SSI system
eC Average Elastic spectrum of fixed-base system
Cv Foundation horizontal viscous damping Cφ Foundation rocking viscous damping
yC~ Inelastic spectrum of SSI system Cy Inelastic spectrum of fixed-base system D Soil hysteretic damping g Gravitational acceleration H Actual height of super structure h Equivalent height of fixed-base system k Translational stiffness of fixed-base system kv Translational stiffness of foundation kφ Rocking stiffness of foundation m Mass of super structure m0 Mass of foundation n Inelastic modification factor of fixed-base system n~ Inelastic modification factor of SSI system PGA Average peak ground acceleration r Equivalent radius of base dimension of the foundation R Fixed-base inelastic reduction factor R~ SSI inelastic reduction factor T~ SSI period T Fixed-base period umax Maximum relative displacement
maxu Average maximum relative displacement
totalu Average total displacement
xu Average translational displacement of foundation uy Fixed-base yielding displacement
yu~ SSI yielding displacement Vs Soil shear wave velocity
eV Average fixed-base elastic base shear Vy Fixed-base yield base shear
yV~ SSI yield base shear W Weight of super structure
α Exponent of SSI inelastic modification factor β~ Total SSI effective damping ratio βο SSI effective damping ratio from foundation interaction λ Ratio of SSI period respect to Fixed-base period µ Ductility demand μt Target ductility
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

16
µ Average ductility demand φ Average rotation of foundation
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

17
APPENDIX B
The horizontal and rocking stiffness coefficients in (1) and the corresponding damping
coefficients of the equations of motion of the SSI system in Fig. 1 are calculated based on the
following assumptions: (1) the effective height and mass of the single story model are 70 percent
of those of the superstructure; (2) the mass of the foundation is 20 percent of the mass of the
superstructure; (3) the rocking moment of inertia of the foundation is equal to 5 percent of mh2;
(4) the density of concrete is 2400 kg/m3 and that of the soil 1900 kg/m3, the Poisson’s ratio of the
soil is 0.4; (5) the thickness of the slabs in the superstructure is 0.2 m; (6) the number of stories is
equal to 10 times the fixed base period in seconds; (7) each story is 3-m high; (8) the weight of
beams and columns is the same as that of the floor slab; (9) the foundation is fully embedded and
the embedment depth is 20 percent of the superstructure’s height; (10) the floors and the
foundation are square in plan. Details of the derivations may be found in Jarernprasert [21] and
lead to the following quantities:
Relative translational stiffness, k/kv:
11
2 234.012860 −−
+
=
BH
BH
Vkk
sv (A1)
Vs is the shear wave velocity, in m/s, of the elastic halfspace.
Relative rocking stiffness, kh2/kφ:
1
2
2
7.017000 −
+
=
BH
BH
Vkkh
sφ
(A2)
By substituting (A1) and (A2) into (1), λ = TT~ can be written as:
++
+
+=
−
BH
BH
BH
BH
Vs 7.01
35.0
234.01
145.0200001
1
22λ (A3)
Conversely, solving this equation for Vs, we have:
++
+−=
)0.7(1
0.35
)0.234(1
0.1451
2100 2
BH
BH
BH
BHλ
Vs (A4)
Now, by substituting (A4) into (A1) and into (A2), k/kv and kh2/kφ can be expressed solely in
terms of the parameters λ and H/B.
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

18
Damping
β0 in (2) can be related to the coefficients cv and cφ of the two viscous dampers used in the SSI
system shown in Fig. 2 as follows:
+
=
−
φ
φπβkkh
hC
kkC
TT
kT vv
2
2
23
0 ~ (A5)
Using (A5) and the formulas in Gazetas (1991), we obtain:
DTTTk
kkh
kk
TTkT
C v
v
v
+
+
=~
~
22
3
0
πα
πβ
φ
(A6)
DTT
hTk
kkh
kk
TTkT
hC
v
+
+
=~
~
222
3
0
2 πψ
πβ
φ
φ
φ (A7)
D is the fraction of linear hysteretic damping in the soil, taken to be 0.05, and ψ is given by:
2
2410367.0
= −−
BHTVx sψ (A8)
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
19
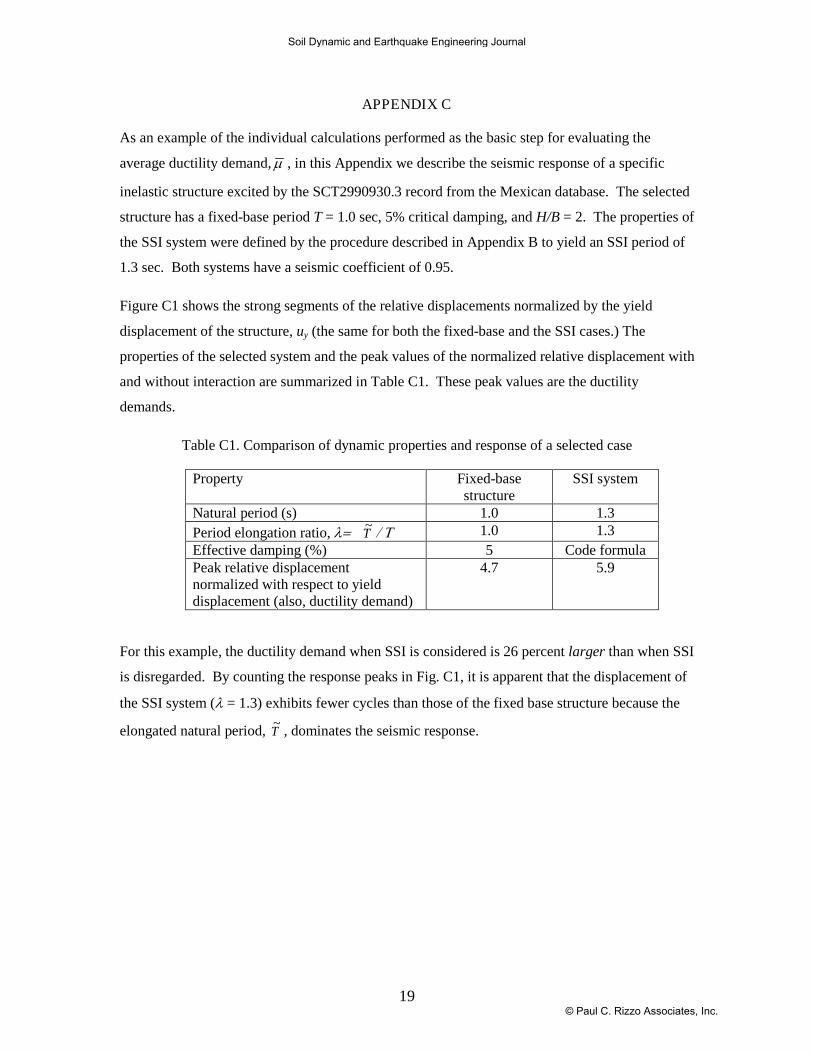
APPENDIX C
As an example of the individual calculations performed as the basic step for evaluating the
average ductility demand, µ , in this Appendix we describe the seismic response of a specific
inelastic structure excited by the SCT2990930.3 record from the Mexican database. The selected
structure has a fixed-base period T = 1.0 sec, 5% critical damping, and H/B = 2. The properties of
the SSI system were defined by the procedure described in Appendix B to yield an SSI period of
1.3 sec. Both systems have a seismic coefficient of 0.95.
Figure C1 shows the strong segments of the relative displacements normalized by the yield
displacement of the structure, uy (the same for both the fixed-base and the SSI cases.) The
properties of the selected system and the peak values of the normalized relative displacement with
and without interaction are summarized in Table C1. These peak values are the ductility
demands.
Table C1. Comparison of dynamic properties and response of a selected case
Property Fixed-base structure
SSI system
Natural period (s) 1.0 1.3 Period elongation ratio, λ= T~ / Τ 1.0 1.3 Effective damping (%) 5 Code formula Peak relative displacement normalized with respect to yield displacement (also, ductility demand)
4.7 5.9
For this example, the ductility demand when SSI is considered is 26 percent larger than when SSI
is disregarded. By counting the response peaks in Fig. C1, it is apparent that the displacement of
the SSI system (λ = 1.3) exhibits fewer cycles than those of the fixed base structure because the
elongated natural period, T~ , dominates the seismic response.
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
20
Fig. 1 Mean elastic spectrum with 5% damping ratio and inelastic coefficients C and n for
accelerograms from California (left) and from Mexico City (right)
Fig. 2 Fixed-base and SSI systems: (a) Fixed-base system (b) Soil structure interaction system (c)
Hysteretic behavior
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
21
Fig. 3 Mean response spectra of elastic SSI systems for different λ = TT~ , in terms of the fixed-base period, T for California (left) and Mexico City (right)
Fig. 4 Mean response spectra of elastic SSI systems for different λ = TT~ , in terms of the SSI period, T~ , for California (left) and Mexico City (right)
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
22
Fig. 5 Inelastic mean seismic coefficient for different λ= TT~ , for a target ductility µt = 2, in terms of SSI period, T~ , for California (left) and Mexico City (right)
Fig. 6 Inelastic mean seismic coefficient for different λ= TT~ , for a target ductility demand µt = 4, as a function of SSI period, T~ for California (left) and Mexico City (right)
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
23
Fig. 7 Comparison of target ductilities (dotted lines) with mean ductility demands of SSI systems
designed with current code SSI provisions (solid lines), for λ = TT~ = 1.1, 1.3 and 1.5, for California (left) and Mexican records (right)
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

24
Fig. 8 Comparison of target ductility (dotted lines) with mean ductility demands for SSI systems
designed ignoring SSI (solid lines) for λ = TT~ = 1.1, 1.3, and 1.5, for California (left) and Mexican records (right)
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

25
Fig. 9 Variability of mean ductility demand µ with yield strength yC~ for systems with
λ = TT~ = 1.3 and prescribed fixed-base elastic periods, T, for California (left) and Mexico City (right)
Fig. 10 Unreduced Inelastic Spectra ),~(~ λTC for different λ= TT~ , determined by regression for
California (left) and Mexico City (right)
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
26
Fig. 11 Exponent ),~(~ λTn for different λ= TT~ , determined with regression for California (left) and Mexico City (right)
Fig. 12 Spectra of exact ratio z ),~(~ λTn / )1,~(~ =λTn and approximated value α(λ)=1/λ
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

27
Fig. 13 Comparison of “exact” and approximate seismic coefficients of SSI inelastic systems with
λ = TT~ = 1.1 to 1.5 from top to bottom, respectively, for California (left) and Mexico City (right)
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.
28
Fig. 14 Mean response ductility demand of inelastic SSI structures designed via the proposed SSI
method (solid line) with λ = TT~ = 1.1, 1.3 and 1.5 from top to bottom, respectively, for Californian (left) and Mexican records (right)
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.

29
Fig. 15 Ratio of mean maximum total displacement of SSI systems from (21) to the “exact” value from numerical integration, for Californian (left) and Mexican (right) records, for target ductility
µt between 2 and 5.
Fig. C1 Response of a selected structure to the Mexican SCT2990930 record
Soil Dynamic and Earthquake Engineering Journal
© Paul C. Rizzo Associates, Inc.







