OptimalEstimationTheory(CooperativeLocalization)
AdvancedSignalProcessing(SignalsofOpportunity)
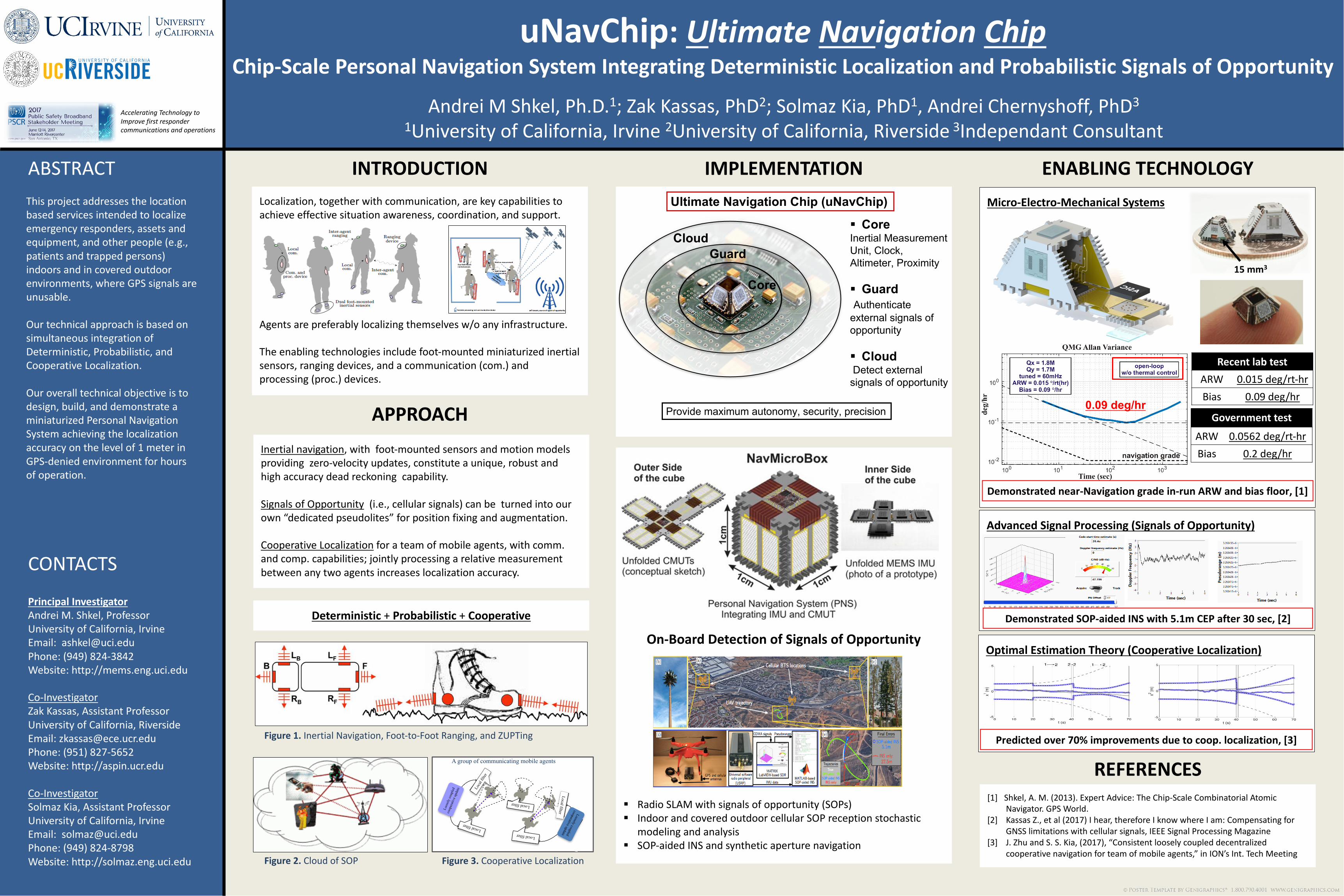
Micro-Electro-MechanicalSystems
uNavChip:UltimateNavigationChipChip-ScalePersonalNavigationSystemIntegratingDeterministicLocalizationandProbabilisticSignalsofOpportunity
AndreiMShkel,Ph.D.1;ZakKassas,PhD2;Solmaz Kia,PhD1,AndreiChernyshoff,PhD3
1UniversityofCalifornia,Irvine2UniversityofCalifornia,Riverside 3IndependantConsultant
INTRODUCTION
APPROACH
ENABLINGTECHNOLOGYIMPLEMENTATION
REFERENCES
Figure2. CloudofSOP Figure3. CooperativeLocalization
ABSTRACT
CONTACTS
PrincipalInvestigatorAndreiM.Shkel,ProfessorUniversityofCalifornia,IrvineEmail: [email protected]:(949)824-3842Website:http://mems.eng.uci.edu
Co-InvestigatorZakKassas,AssistantProfessorUniversityofCalifornia,RiversideEmail:[email protected]:(951)827-5652Website:http://aspin.ucr.edu
Co-InvestigatorSolmaz Kia,AssistantProfessorUniversityofCalifornia,IrvineEmail:[email protected]:(949)824-8798Website:http://solmaz.eng.uci.edu
Thisprojectaddressesthelocationbasedservicesintendedtolocalizeemergencyresponders,assetsandequipment,andotherpeople(e.g.,patientsandtrappedpersons)indoorsandincoveredoutdoorenvironments,whereGPSsignalsareunusable.
OurtechnicalapproachisbasedonsimultaneousintegrationofDeterministic,Probabilistic,andCooperativeLocalization.
Ouroveralltechnicalobjectiveistodesign,build,anddemonstrateaminiaturizedPersonalNavigationSystemachievingthelocalizationaccuracyonthelevelof1meterinGPS-deniedenvironmentforhoursofoperation.
Inertialnavigation,with foot-mountedsensorsandmotionmodelsproviding zero-velocityupdates,constituteaunique,robustandhighaccuracydeadreckoning capability.
SignalsofOpportunity (i.e.,cellularsignals)canbe turnedintoourown“dedicatedpseudolites”forpositionfixingandaugmentation.
CooperativeLocalization forateamofmobileagents,withcomm.andcomp.capabilities;jointlyprocessingarelativemeasurementbetweenanytwoagentsincreaseslocalizationaccuracy.
Localization,togetherwithcommunication,arekeycapabilitiestoachieveeffectivesituationawareness,coordination,andsupport.
Agentsarepreferablylocalizingthemselvesw/oanyinfrastructure.
Theenablingtechnologiesincludefoot-mountedminiaturizedinertialsensors,rangingdevices,andacommunication(com.)andprocessing(proc.)devices.
[1] Shkel,A.M.(2013).ExpertAdvice:TheChip-ScaleCombinatorialAtomicNavigator.GPSWorld.
[2] Kassas Z.,etal(2017)Ihear,thereforeIknowwhereIam:CompensatingforGNSSlimitationswithcellularsignals,IEEESignalProcessingMagazine
[3] J.ZhuandS.S.Kia,(2017),“Consistentlooselycoupleddecentralizedcooperativenavigationforteamofmobileagents,”inION’sInt.TechMeeting
AcceleratingTechnologytoImprovefirstrespondercommunicationsandoperations
§ CoreInertial Measurement Unit, Clock, Altimeter, Proximity
§ GuardAuthenticate
external signals of opportunity
§ CloudDetect external signals of opportunity
Ultimate Navigation Chip (uNavChip)
Provide maximum autonomy, security, precision
GuardCloud
Core
Demonstratednear-Navigationgradein-runARWandbiasfloor,[1]
Governmenttest
ARW 0.0562deg/rt-hrBias 0.2deg/hr
RecentlabtestARW 0.015deg/rt-hrBias 0.09deg/hr
0.09 deg/hr
A group of communicating mobile agents
Figure1. InertialNavigation,Foot-to-FootRanging,andZUPTing
Deterministic+Probabilistic+Cooperative
§ RadioSLAMwithsignalsofopportunity(SOPs)§ IndoorandcoveredoutdoorcellularSOPreceptionstochastic
modelingandanalysis§ SOP-aidedINSandsyntheticaperturenavigation
§ RadioSLAMwithsignalsofopportunity(SOPs)§ IndoorandcoveredoutdoorcellularSOPreceptionstochastic
modelingandanalysis§ SOP-aidedINSandsyntheticaperturenavigation
On-BoardDetectionofSignalsofOpportunity
15mm3
DemonstratedSOP-aidedINSwith5.1mCEPafter30sec,[2]
Predictedover70%improvementsduetocoop.localization,[3]







