
Week 2/3
1. System interconnections (block diagrams)2. Finite State Machines (Chapter 3)

Recall

A system S is a function : InputSignals OutputSignalswith
InputSignals = [D R],OutputSignals = [D’ R’]
Sx InputSignals y = S(x) OutputSignals

10Evans: [Ints+ {enter, leave}] [Ints+ Integers+ ]
10Evansu = (e,l,l,e,e,… ) y = (6,5,4,5,6,… )
initial number in room
5
InputSignals OutputSignals
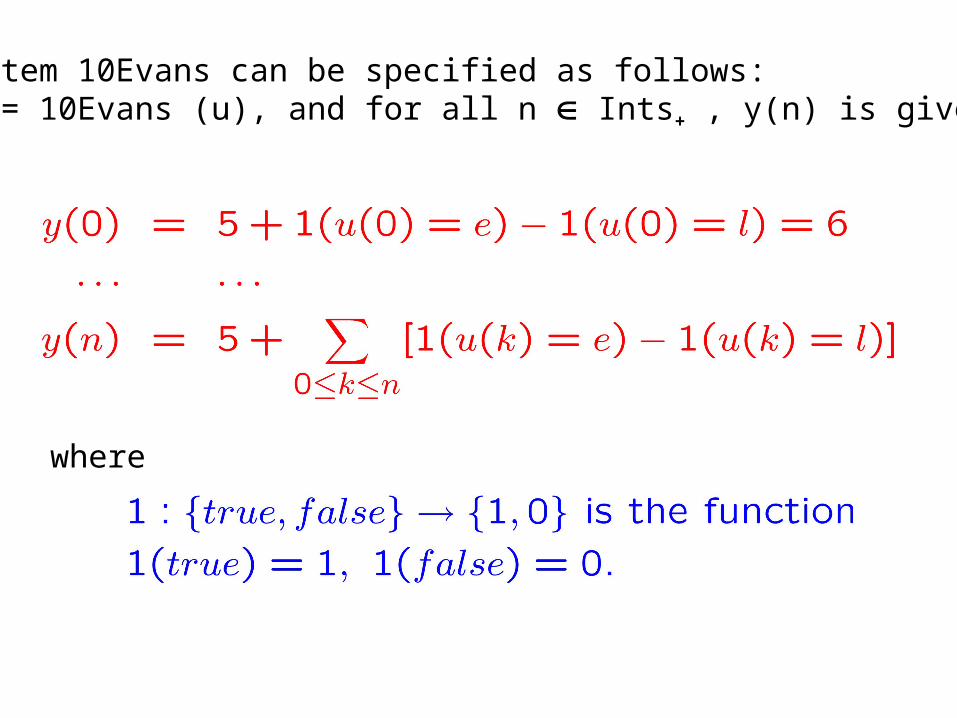
The system 10Evans can be specified as follows: y = 10Evans (u), and for all n Ints+ , y(n) is given by
where

How do you ‘give’ S?
Su Speeds y=S(u) Positions
Speeds = [[0,5] Reals], Positions = [[0,5] Reals]
y(0)
initial position

Other examples: TopicNotes/Systems/DTMF
KeypadSequences
Sounds
DTMF
DTMF: [Nats KeypadSymbols] [Time Pressure]

Interconnecting Systems:Block Diagrams
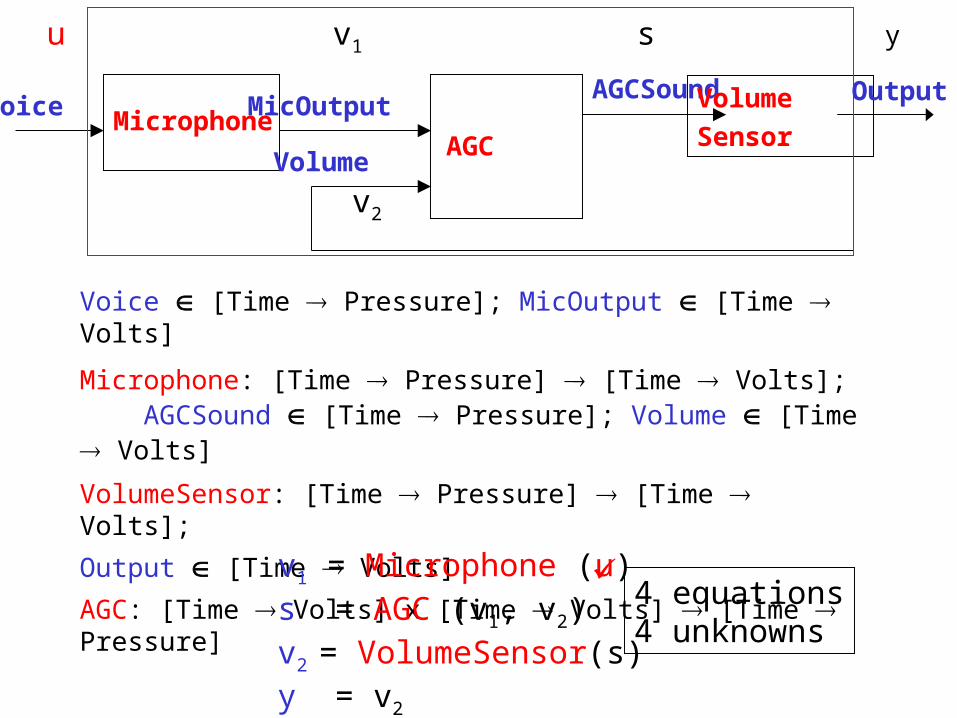
Voice [Time Pressure]; MicOutput [Time Volts]
Microphone: [Time Pressure] [Time Volts]; AGCSound [Time Pressure]; Volume [Time Volts]
VolumeSensor: [Time Pressure] [Time Volts];
Output [Time Volts]
AGC: [Time Volts] x [Time Volts] [Time Pressure]
v1 = Microphone (u)s = AGC (v1, v2)v2 = VolumeSensor(s)y = v2
MicOutputAGCSound
Microphone AGC
Volume
VolumeSensor
Voice
u v1 s
v2
Output
y
4 equations4 unknowns

Finite State Machines

Recognizerx = (x(0), x(1), x(2), …) y = (y(0), y(1), y(2), …)
x InputSignals = [Nats0 {0,1}]y OutputSignals = [Nats0 {t,f}]
x InputSignals y OutputSignals
Recognizer(x)(n) = t, if (x(n-2),x(n-1),x(n)) = (0,0,0) = f, else
Recognizer((0,1,0,0,0,0,1,1, …)) = (f,f,f,f,t,t,f,f, …)

init
a
b
0/f 0/f
0/t
1/f
1/f 1/f
x InputSignals yOutputSignals
x = (0, 1, 0, 0, 0, 0, 1, 1, …)s = (init, a, init, a, b, b, b, init, …)y = (f, f, f, f, t, t, f, f, …)
s(0) = init(s(n+1), y(n)) = update (s(n), x(n)), n = 0,1,…

init
a
b
{0}/f {0}/f
{0}/t
{1,2}/f
{1,2}/f {1,2}/f
x[Nats0 {0,1,2}] y[Nats0 {t,f}]
x = (0, 2, 0, 0, 0, 0, 1, 2, …)s = (init, a, init, a, b, b, b, init, …)y = (f, f, f, f, f, t, t, f, …)
s(0) = init(s(n+1), y(n)) = update (s(n), x(n)), n = 0,1,…
guard

What does this machine with 4 states do?
‘1,2’
‘0’
’00’
{0}/f {0}/f
{0}/t
{1,2}/f
{1,2}/f {1,2}/f
y[Nats0 {t,f}]
init{0}/f
{1,2}/f
x[Nats0 {0,1,2}]
It also implements Recognizer
Can a machine with 2 states implement Recognizer?

Formal definition of state machine
1. Sets and functions2. Bubble and arcs3. Tabular

A state machine is a 5-tuple
StateMachine = (States, Inputs, Outputs, update, initialState)States is the state space
Inputs is the input alphabet
Outputs is the output alphabet
initialState States is the initial state
update: States x Inputs States x Outputs is the update function
Sets and function

For Recognizer
States = {init, a, b}Inputs = {0,1}Outputs = {t, f}initialState = init
update(init, 0) = (0, f)update(init, 1) = (init, f)…
update: States x Inputs States x Outputs is given by:
currentstate
currentinput
nextstate
currentoutput
(s(n+1), y(n)) = update(s(n), x(n))

It is useful sometimes to express the update function astwo functions:
update = (nextState, output),nextState: States x Inputs States output: States x Inputs Outputs
so thatupdate(s(n), x(n)) = (s(n+1), y(n))nextState(s(n), x(n)) = s(n+1)output(s(n), x(n)) = y(n)

Operation of state machine
Given S = (States, Inputs, Outputs, update, initialState)
InputSignals = [Nats0 Inputs]
OutputSignals = [Nats0 Outputs]
An input signal x = (x(0), x(1), … , x(n), …) determines thestate response s: Nats0 States and theoutput signal y: Nats0 Outputs
by the recursion, s(0) = initState, and n 0,(s(n+1), y(n)) = update (s(n), x(n))
Thus S determines an input-output function (system)F: InputSignals OutputSignals
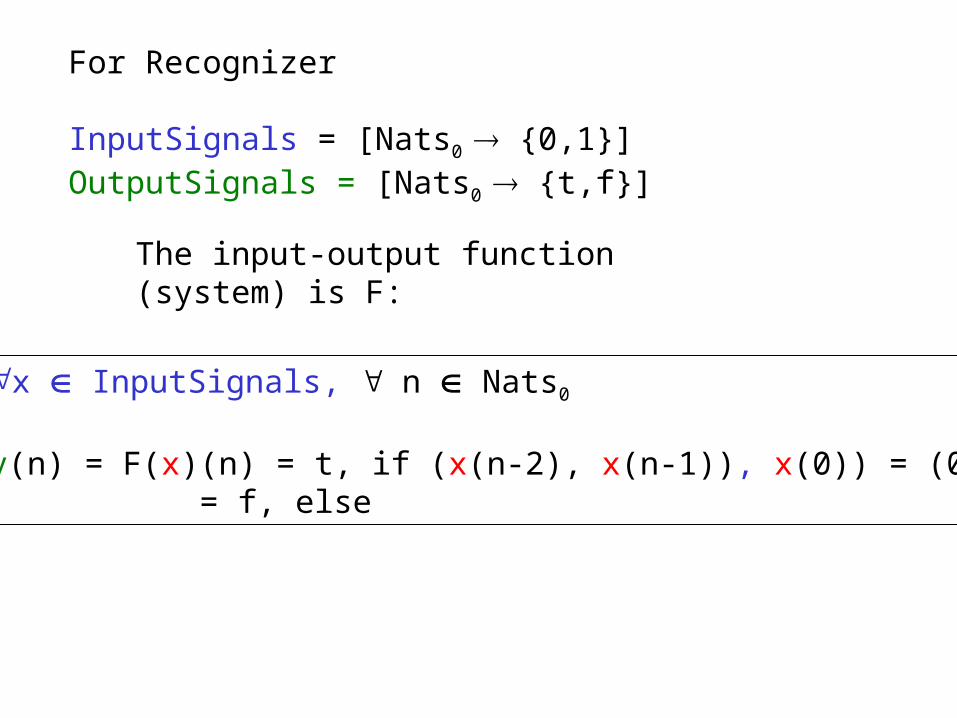
For Recognizer
InputSignals = [Nats0 {0,1}]OutputSignals = [Nats0 {t,f}]
The input-output function (system) is F:
x InputSignals, n Nats0
y(n) = F(x)(n) = t, if (x(n-2), x(n-1)), x(0)) = (0,0,0) = f, else

Stuttering
It is useful to introduce a stuttering symbolabsent
We insist that absent Inputs and absent Outputs
We require that for all states s Statesupdate(s, absent) = (s, absent)

A modified Recognizer
init
a
b
0/abs 0/abs
0/t
1/abs
1/abs 1/abs
x InputSignals yOutputSignals
x = (0, 1, 0, 0, 0, 0, 1, 1, …)s = (init, a, init, a, b, b, b, init, …)y = (abs, abs, abs, abs, t, t, abs, abs, …)
Bubbles and arcs

Shorthand: the ‘else’ loop
init
a
b
{0}/abs {0}/abs
else
else
x[Nats0
{0,1,2, absent}]
y[Nats0
{t,absent}]
else 0/t

Shorthand: the implicit ‘else’ self loop
init
a
b
{0}/abs {0}/abs
else
else
x[Nats0
{0,1,2, absent}]
y[Nats0
{t,absent}]
else 0/t

Shorthand: the implicit ‘absent’
init
a
b
{0}/ {0}/
else
else
x[Nats0
{0,1,2, absent}]
y[Nats0
{t,absent}]
else 0/t
absabs
The guards are subsets of Inputs
• guards on different arcs from same state are disjoint (determinism)• union of all guards (from same state) = Inputs; (reactive system)• guard on ‘else’ is complement of remaining guards• guards may be defined using convenient notation, eg. if Inputs = {a, b, c}, a = {b,c}
Tabular Representation

All information about a state machine is given itsupdate function. If States and Inputs are finite,update can be given as a table
(next state, output) if input iscurrentstate
init
a
b
0 1 absent
(a, f)
(b, f)
(b, t)
(init, f)
(init, f)
(init, f)
(init, abs)
(a, abs)
(b, abs)
System requirements in English
System specification as
F: InputSignals OutputSignals
System implementation as state machineDescribed by set-and-functions 5-tuple,transition diagram, or table
State machine design process
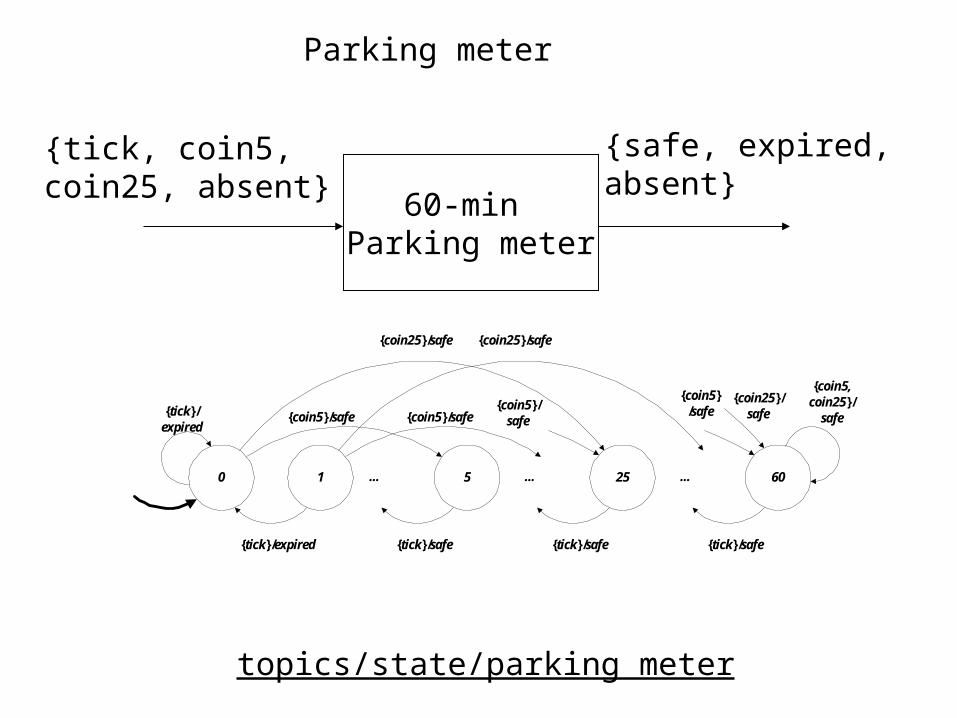
0 1
{coin5}/safe
{tick}/expired
5
{tick}/expired
{tick}/safe
...
{coin5}/safe
... 25
{tick}/safe
{coin25}/safe {coin25}/safe
60
{tick}/safe
...
{coin5,coin25}/safe
{coin5}/safe
{coin25}/safe
{coin5}/safe
60-min Parking meter
{tick, coin5,coin25, absent}
{safe, expired,absent}
Parking meter
topics/state/parking meter

Answering machine
topics/state/answering machine
table







