dr. uri mahlab transmitterreceiver channel lets assume we would like to represent a channel by using...
TRANSCRIPT
Dr. Uri Mahlab
transmitter ReceiverChannel
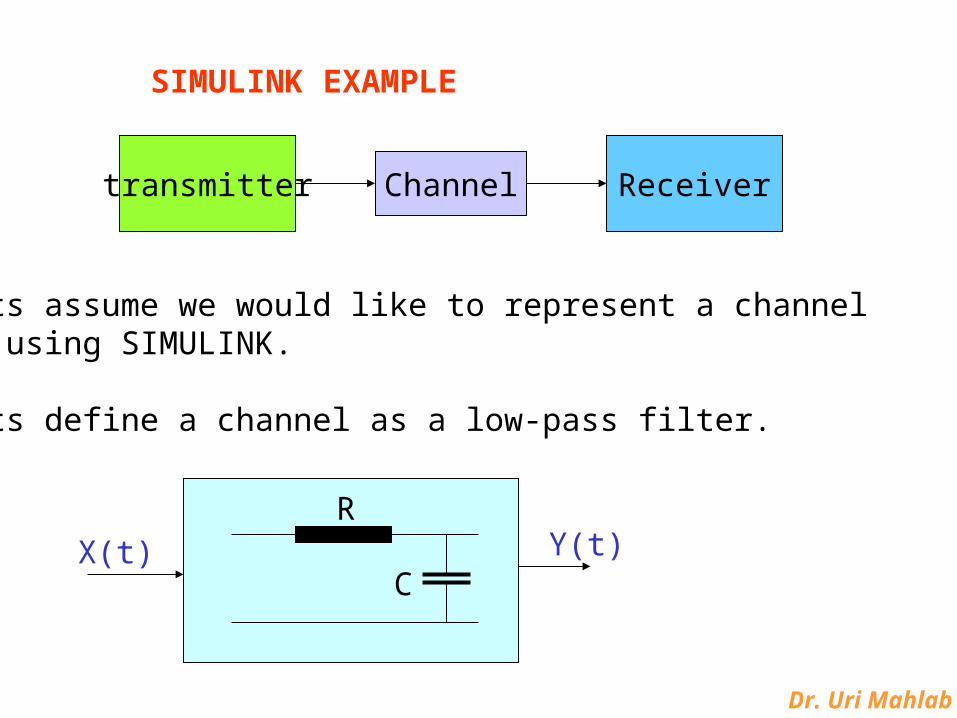
Lets assume we would like to represent a channel by using SIMULINK.
Lets define a channel as a low-pass filter.
SIMULINK EXAMPLE
X(t) Y(t)R
C

Dr. Uri Mahlab
s
ss
TRC
T
zsT
zs
ZzX
zY
SRCsHzH
/1
11
)1(
1
)(
)(
1
1)()(
11
)(1
1))1((
1)(
)()1()( 1
nTxTnynTy
or
zXZzY
In the time domain we get :

Dr. Uri Mahlab
Simulation goals
source scopeH(z)In Out
1 - Drawing the icon picture
Definitions before we start to build the model:
X(t) Y(t)R
C
F cut-off = [Hz]

Dr. Uri Mahlab
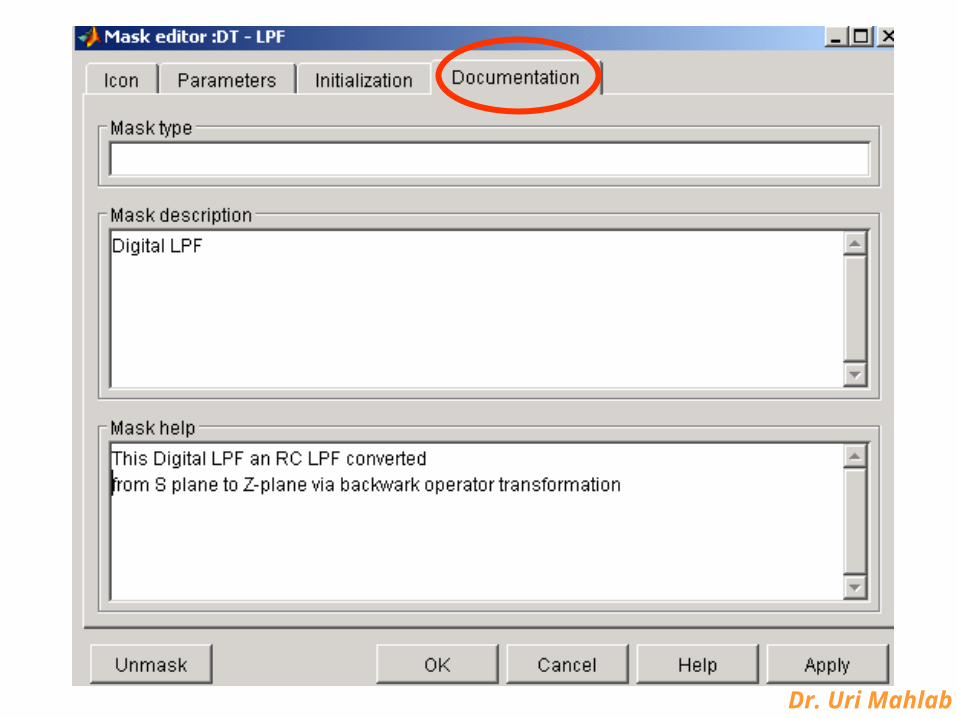
3 -Look under mask
2 – User guide window
T-sampleRC
T-sample
In
R C
4 – S function

Dr. Uri Mahlab
METHOD
1
Dr. Uri Mahlab
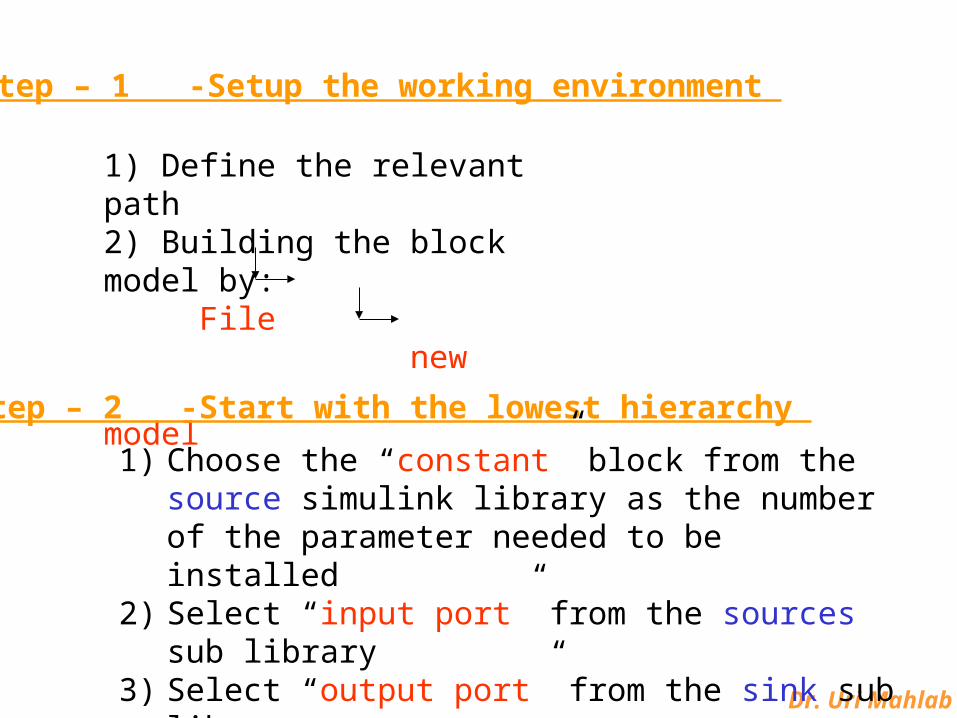
Step – 1 -Setup the working environment
1) Define the relevant path2) Building the block model by:
File new model

Dr. Uri Mahlab
systemin out
S-function
Step – 2 -input ports
Build input ports

Dr. Uri Mahlab
Step - 3 - Operation with Mask editor called “Edit Mask ”
Icon on the BlockClick right mouthThis is the frame where you build the windows guide
ICON PARAMETERS Init.. Documentation
Mask typeMask description
Prompt Variable Type Tsample edit R edit C edit
Connecting the block constant to the real parameters

Dr. Uri Mahlab
01 11
00 10
Units “Normalized
R
C
0.2 0.5
0.850.800.75
fprintf(‘Fcutoff=%1.2f’,1/RC)%plot([x],[y])plot([0,0.2],[0.8,0.8])plot ([0.2, 0.2, 0.5, 0.5, 0.2],[0.75,0.85,0.85,0.75,0.75])Plot([0.5,1],[0.8,0.8])
Step – 3-1 – draw icon

Dr. Uri Mahlab
Step – 3-2 - Operation with Mask editor called “Edit Mask ”

Dr. Uri Mahlab
Dr. Uri Mahlab
Dr. Uri Mahlab
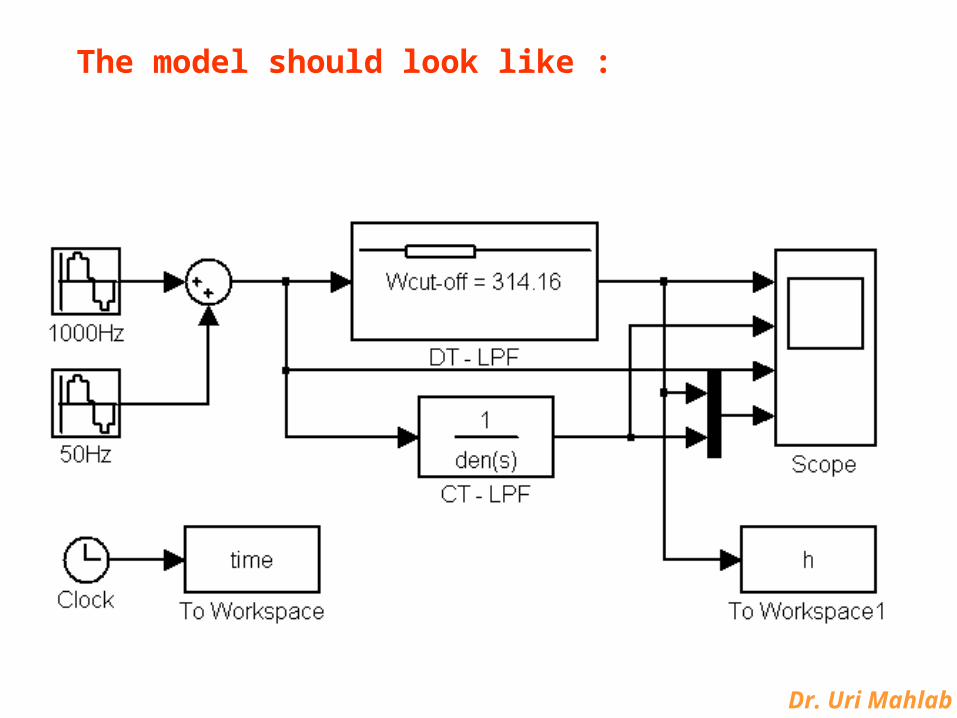
The model should look like :

Dr. Uri Mahlab
S – function contains the name of the program and users parameters
Step – 4 -Start with S - function
Choose the S-Function from the “User Define function” library
S-function name should be the same as the name of the file.m

Dr. Uri Mahlab
Function(sys, xo, str, ts)=s_function_name(t,x,u,flag,parameters)
s_function_name
Model_name <> S-Function name
returns inputs
Gets:t- running time x – state variableu- input signalflag – s_function status flag
Returnssys – model parament array x0 – initial state conditionsstr – state ordering stringts – sampling time
Step – 4-1: S-function
function [sys,x0,str,ts] = sfunc_DiffequLPF(t,x,u,flag,Tsample,R,C)

Dr. Uri Mahlab
The model should look like :
Double
click

Dr. Uri Mahlab
Step – 4:1 – Defining the S-function
a) Initialization – setup number of input and outputs
function [sys,x0,str,ts]=mdlInitializeSizes
% call simsizes for a sizes structure, fill it in and convert it to a% sizes array.% Note that in this example, the values are hard coded. This is not a% recommended practice as the characteristics of the block are typically% defined by the S-function parameters.
sizes = simsizes;
sizes.NumContStates = 0;sizes.NumDiscStates = 1; represent the Number of delay units in the iirsizes.NumOutputs = 1; dynamic size allocationsizes.NumInputs = -1; dynamic size allocationsizes.DirFeedthrough = 1; input dependencysizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
)())1(()( nTxTnynTy

Dr. Uri Mahlab
% initialize the initial conditions
x0 = []; x0 = [0]; Initial conditions
% str is always an empty matrix
str = [];
% initialize the array of sample times
ts = [0 0];
function sys=mdlDerivatives(t,x,u) Stay without changessys = [];
% end mdlDerivatives

Dr. Uri Mahlab
TS = An m-by-2 matrix containing the sample time
% (period, offset) information. Where m = number of sample times. The ordering of the sample times must be:
% TS = [0 0, : Continuous sample time.
% 0 1, : Continuous, but fixed in minor step sample time.
% PERIOD OFFSET, : Discrete sample time where PERIOD > 0 & OFFSET < PERIOD.
% -2 0]; : Variable step discrete sample time where FLAG=4 is used to get time of next hit.
% There can be more than one sample time providing they are ordered such that they are monotonically increasing. Only the needed sample times should be specified in TS. When specifying than one sample time, you must check for sample hits explicitly by eeing if
abs(round((T-OFFSET)/PERIOD) - (T-OFFSET)/PERIOD)
is within a specified tolerance, generally 1e-8. This tolerance is dependent upon your model's sampling times and simulation time.
You can also specify that the sample time of the S-function is inherited from the driving block. For functions which change during minor steps, this is done by specifying SYS(7) = 1 and TS = [-1 0]. For functions which
are held during minor steps, this is done by specifying SYS(7) = 1 and TS = [-1 1].

Dr. Uri Mahlab
function sys=mdlUpdate(t,x,u,Tsample,R,C)% This is where the discrete state is updated
% Yo(n+1) = Yo(n)*(1-a) + a*Yi(n).
% The state x corresponds to the state at the previous time step,
% which is Yo(n-1)
% uri
tau = R*C;
alpha = tau/Tsample;
sys = x*alpha/(1 + alpha) + u/(alpha+1);
% end mdlUpdate
=========================================
% mdlOutputs
% Return the block outputs.
function sys=mdlOutputs(t,x,u,Tsample)sys = x; % The x state now is Yo(n), which is the same as sys from
% the mdlUpdate function
% end mdlOutputs
)(1
1))1((
1)( nTxTnynTy

Dr. Uri Mahlab
METHOD 2
Dr. Uri Mahlab
Step – 1 -Setup the working environment
1) Define the relevant path2) Building the block model by:
File new model
Step – 2 -Start with the lowest hierarchy
1) Choose the “constant” block from the source simulink library as the number of the parameter needed to be installed
2) Select “input port” from the sources sub library3) Select “output port” from the sink sub library4) Drag each to the model frame work and you may get:

Dr. Uri Mahlab
1
1
1
system
in out
S-function
constant
S – function may contains the program to be executed
Untitled window
Dr. Uri Mahlab
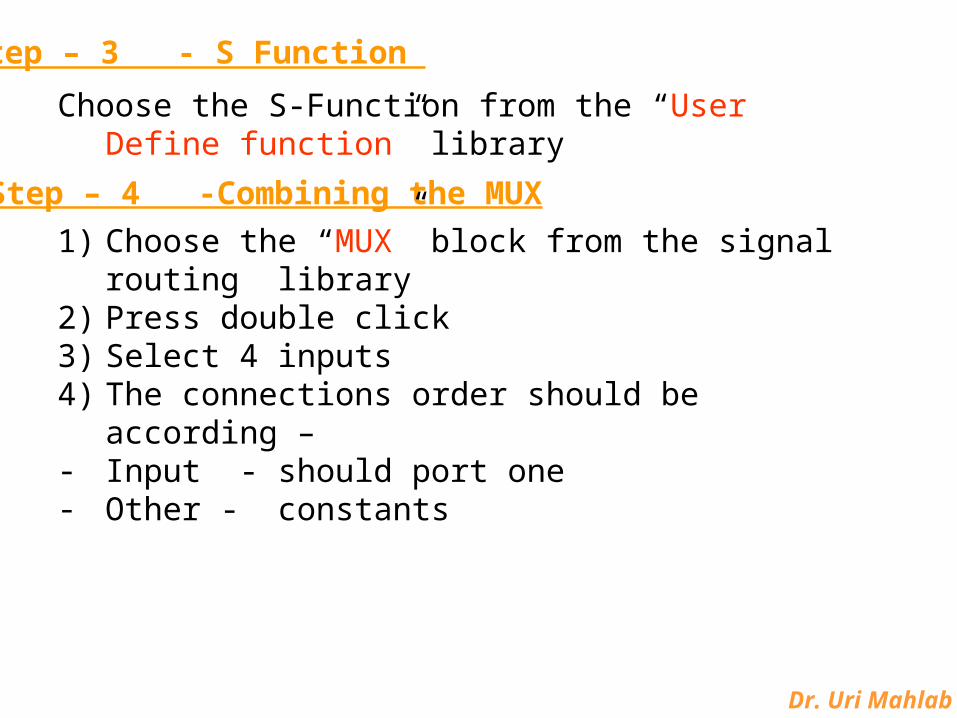
Step – 3 - S Function
Choose the S-Function from the “User Define function” library
Step – 4 -Combining the MUX
1) Choose the “MUX” block from the signal routing library
2) Press double click3) Select 4 inputs4) The connections order should be according – - Input - should port one- Other - constants

Dr. Uri Mahlab
Step – 5 : connecting the following and getting the picture
Tsample
R
C
sfunc_DiffequLPF
In**
Out^^
S-function
Constant 1
Constant 2
Constant 3
In** Out^^
Create sub-system

Dr. Uri Mahlab
Step - 6 - Operation with Mask editor called “Edit Mask ”
Icon on the BlockClick right mouthThis is the frame where you build the windows guide
ICON PARAMETERS Init.. Documentation
Mask typeMask description
Prompt Variable Type Tsample edit R edit C edit
Connecting the block constant to the real parameters
Dr. Uri Mahlab
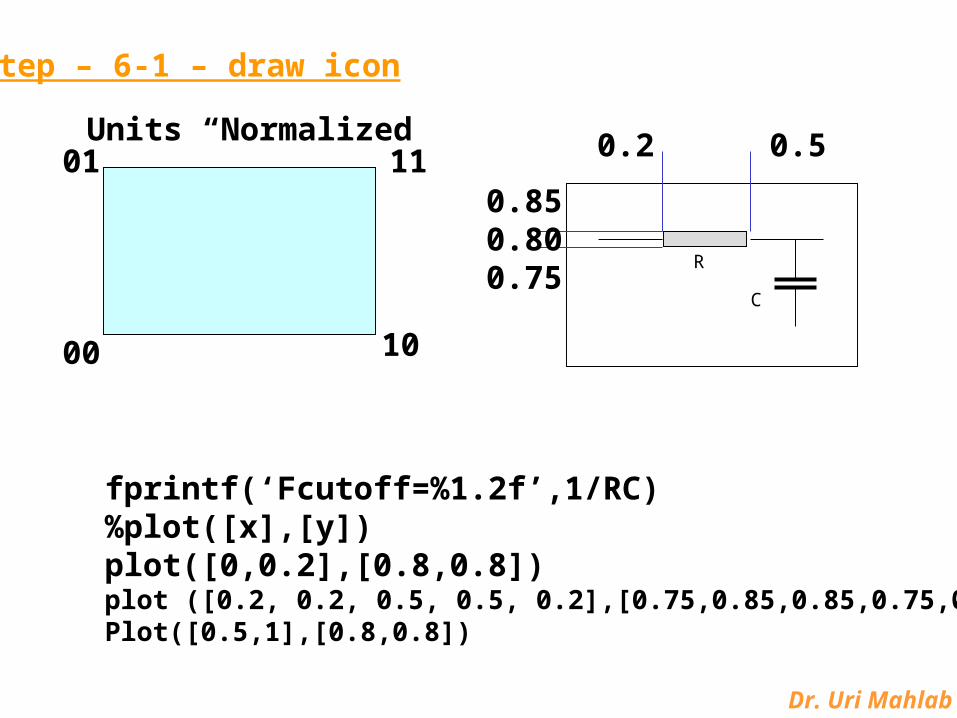
01 11
00 10
Units “Normalized
R
C
0.2 0.5
0.850.800.75
fprintf(‘Fcutoff=%1.2f’,1/RC)%plot([x],[y])plot([0,0.2],[0.8,0.8])plot ([0.2, 0.2, 0.5, 0.5, 0.2],[0.75,0.85,0.85,0.75,0.75])Plot([0.5,1],[0.8,0.8])
Step – 6-1 – draw icon

Dr. Uri Mahlab
Step - 6 - Operation with Mask editor called “Edit Mask ”

Dr. Uri Mahlab

Dr. Uri Mahlab

Dr. Uri Mahlab
The model should look like :

Dr. Uri Mahlab
Function(sys, xo, str, ts)=s_function_name(t,x,u,flag)
s_function_name
Model_name <> S-Function name
returns inputs
Gets:t- running time x – state variableu- input signalflag – s_function status flag
Returnssys – model parament array x0 – initial state conditionsstr – state ordering stringts – sampling time
Step - 7 – s-function

Dr. Uri Mahlab
Step – 7:1 – Defining the S-function
a) Initialization – setup number of input and outputs
function [sys,x0,str,ts]=mdlInitializeSizes
% call simsizes for a sizes structure, fill it in and convert it to a% sizes array.% Note that in this example, the values are hard coded. This is not a% recommended practice as the characteristics of the block are typically% defined by the S-function parameters.
sizes = simsizes;
sizes.NumContStates = 0;sizes.NumDiscStates = 1; represent the Number of delay units in the iirsizes.NumOutputs = 1; dynamic size allocationsizes.NumInputs = -1; dynamic size allocationsizes.DirFeedthrough = 1; input dependencysizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
)())1(()( nTxTnynTy

Dr. Uri Mahlab
% initialize the initial conditions
x0 = []; x0 = [0]; Initial conditions
% str is always an empty matrix
str = [];
% initialize the array of sample times
ts = [0 0];
function sys=mdlDerivatives(t,x,u) Stay without changessys = [];
% end mdlDerivatives

Dr. Uri Mahlab
function sys=mdlUpdate(t,x,u)% This is where the discrete state is updated
% Yo(n+1) = Yo(n)*(1-a) + a*Yi(n).
% The state x corresponds to the state at the previous time step,
% which is Yo(n-1)
% uri
Tsample = u(2); R = u(3); C = u(4);
tau = R*C;
alpha = tau/Tsample;
sys = x*alpha/(1 + alpha) + u(1)/(alpha+1);% end mdlUpdate
=========================================
% mdlOutputs
% Return the block outputs.
function sys=mdlOutputs(t,x,u)sys = x; % The x state now is Yo(n), which is the same as sys from
% the mdlUpdate function
% end mdlOutputs
)(1
1))1((
1)( nTxTnynTy