%dvhg(ujrqrplf ’hvljq
TRANSCRIPT

0DWKHPDWLFDOO\�%DVHG�(UJRQRPLF�'HVLJQ
Karim Abdel-MalekDepartment of Mechanical Engineering and Center for Computer Aided Design (CCAD)
University of IowaIowa City, IA
(319) [email protected]

1. Mathematical formulations
2. Human performance measures
3. Realistic Posture prediction
4. Object in Enclosure
5. Reach envelopes
6. Ergonomic design: Placement and layout
7. Conclusions
Overview
DIGITAL HUMAN Modeling/SIMULATION/Ergonomics

Point sp
WCS
q1
Modeling
We use kinematic methods adapted from the field of Robotics
Joint m-1
Joint m zmzm-1
Link m
Link m-1
xm-1
xm
x(q)Particularly, we use the Denavit-Hartenbergmethod for representing a kinematic chain

q1
q2
q3
q4
q5
q6
q7
q8
q9
Shoulder (5DOF), Elbow (1 DOF), and Wrist (3DOF) Model
xo
yo
X(θ)
Typically, we have used a 9DOFmodel of the upper extremitywhile accounting for the glenohumeral joint and the scapula translational motion
0RGHOLQJ

sp sp
We have also modeled and analyzed the lower extremities
0RGHOLQJ��FRQWLQXHG�

Formulation
Joint Ranges
where and
Position
q1Constraint
(we consider joint ranges in the formulation by parametrizing the inequalities to equalities)
A couple of slides to demonstrate the rigor of our formulation

Jacobian
where
Three Types of Singularities
where
Formulation (continued)
(we perform Manifold Stratification to obtain all Singular behavior)

Human Performance Measures: Cost Functions
Reacheability
Workspace/Functionality
Point of interest
Fig. 13 (a) Wrist and hand (b) Modeling of the wrist joint
Dexterity
Effort
Initial Posture
Final posture
q i3( )
q f3( )
Neutral Stressed
Stress
iir
0A rii
i
Potential Energyqi
qiN
Reference

Example of a Cost Function
Potential Energy for each link of an extremityi
ir0A ri
ii
Now this can be used as a Human Performance Measure and as a Mathematical Function for Ergonomic Design!!!

Given P Posture Prediction
Joint angles
Problems with traditional Inverse Kinematics:1. Computational complexity for high numbers of degrees of freedom2. Choice of correct solution from an infinite number of solutions
3RVWXUH�3UHGLFWLRQ
Given P and [n s a] Posture Prediction
Joint angles
Point
Posture I
Posture IIInitialPosture
Two different postures for reaching the same point.Which one is correct??

a. Inequality Constraints
b. Hand at a given location
Minimum Energy
Simple Effort
P P mii
n
i ii
ii
n
= = -
= =
Ê Ê1
0
1
( ( ))g A r
Min F w P w E = +1 2Minimization
E E w Abs q qii
n
i i iinitial
i
n
= = -
= =
Ê Ê1 1
( )
3RVWXUH�3UHGLFWLRQ��&RQWLQXHG�
Constraints
Solve using Genetics Algorithms
Simplified Algorithm

Target point/object perimeter
x( ) ( );11 1 1 1w w w wL U � �
x( ) ( );22 2 2 2w w w wL U � �
x( ) ( );33 3 3 3w w w wL U � �
Proposed Path
x( ) ( );44 4 4 4w w w wL U � �
x( ) ( );55 5 5 5w w w wL U � �
Y( )v
G( )u
x( ) ( );77 7 7 7w w w wL U � �
x( ) ( );76 6 6 6w w w wL U � �
Object Inside an Enclosure (Planar example)
Y( )v
x( , )u v

x( )1
x( )2
x( )3
x( )4
x( )5
x( )6
x ( )7
q2q1
s s
Ability for shoulder totranslate outside the enclosure
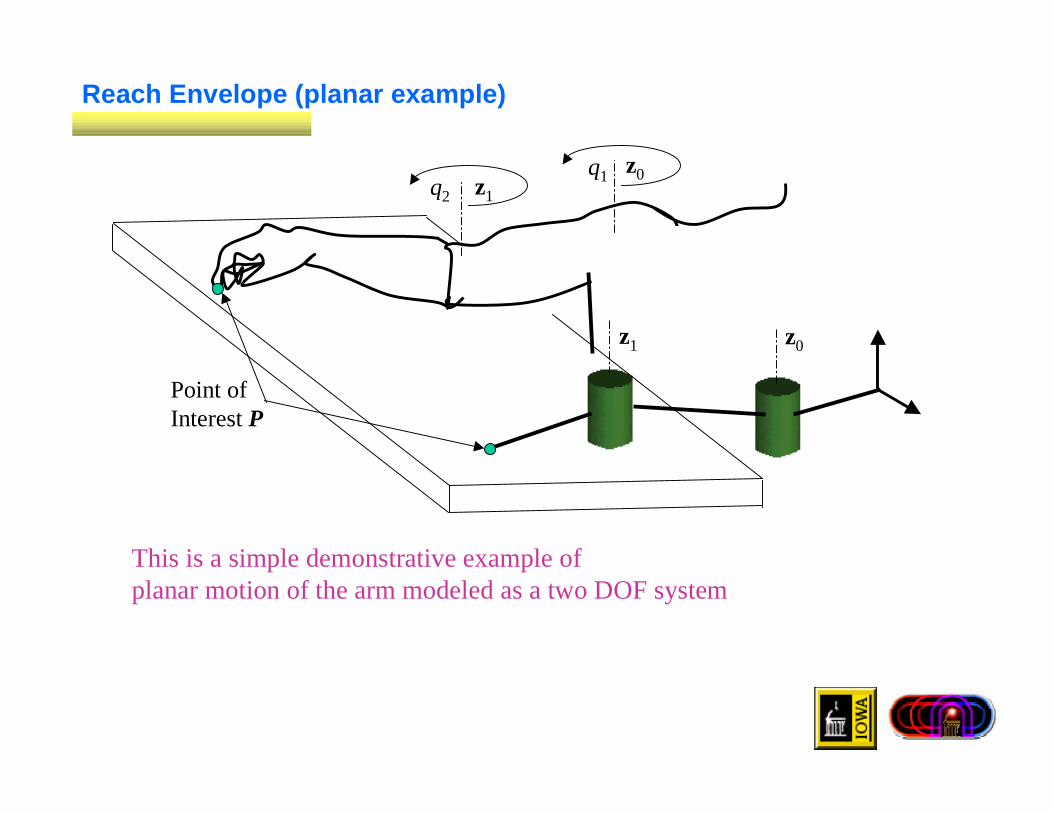
Reach Envelope (planar example)
This is a simple demonstrative example of planar motion of the arm modeled as a two DOF system
Point of Interest P
z0z1
z0z1
q1q2

For The curve equation is
Example (continued)
Exact Reach Envelope
x(4)
x(3)
x(1)
x
y
x(2)x(5)
p

q1
q2
q3
q4
q5
q6
q7
q8
q9
Shoulder (5DOF), Elbow (1 DOF), and Wrist (3DOF) Model
xo
yo
X(θ)
Consider the workspace of a realistic model

z0
q4
q3
For example, substitute the singular set and
4DOF Arm Example (continued)
Singular surfaces (otherwise known as barriers)These are of importancein obtaining a better understanding of the envelope

For and
q1
q3z0
4DOF Arm Example (continued)

This is the reach envelope and barriers therein in closed form.
Can be used for Design Optimization Visualization

0
1
2
3
0
0.5
1
-2
0
0
0.5
1
-2
0
Finger Workspace
x0
z0
q2
q3q4
1.51q1
z1
z2z3
1
Point P
(a) A schematic of a finger (b) Kinematic modeling of the finger as four revolute joints
Workspace of the finger

• Will be used to evaluate the degree of disability• To monitor the progress post surgery• Can be integrated to yields a number
Point of interest
Wrist’s Range of Motion (Quantifying the Workspace)

Point of interest
Example: Quantifying therange of motion after surgery
4XDQWLI\LQJ�WKH�3URJUHVV

Targetpoints
z0
x0
q1q2z1
z2
x2y2
SpecifiedPoint sp
Illustrative Example
These are points that must be touched in space
3ODFHPHQW
Objective: To place a person with respect to predefined target points while minimizing or maximizing a given Cost Function

-40 -20 0 20 40-20
-10
0
10
20
30
-2-1012-20
-10
0
10
20
30
Target point sp1 (-25,-8)
Target pointsp2 (-35,12)
α
(-19.3,6.8)
Example (continued)
The workspace has automatically moved to include the target points
Initial Position and Orientation
Final Position and Orientation

Target points
Initial Position
Final position after the Placement Algorithm

Define target points Reach envelope has been identified
Cost function
Constraints (no need for inverse kinematics)
Move boundary of reach envelopeMaximize ReacheabilityMinimize ForceMaximize Dexterity (orientability)Minimize Repetitive injuries (e.g., carpal tunnel syndrome)
Satisfies Tolerance
Stop
Iterate
w = w + ∆wIterative algorithm to move the workspace
3ODFHPHQW�$OJRULWKP
Define human (dimension and ranges of motion)
Defined by the six generalized coordinates w that characterize its position and orientation
Example of cost functions:

Maintainability and Design• Reduce lifecycle costs by lowering maintenance requirements
• Design products to optimize maintainability
• Ensure that technicians can access parts and tools
• Anticipate strength and time requirements for maintenance tasks
Kinematics

File Anatomy Envelope Cross-Sections Placement Layout/Design Cost Functions Torques/Forces
ERGONOMICA
NewOpenCloseSaveSave AsPrintPropertiesSetup
Joints >Limbs >Torso
GenerateShowProperties >Move >RotateScaleErase
AreaVolumeMassInertia
Slice >Section >AngleDepthThickness
Shoulder >Knee >Wrist >Neck >:
Finger sizeGlove sizeFoot sizeArm size
Target points >Constraints >Forbidden Zones >
ReacheabilityDexterityCumulative TraumaStatic ForcesDynamics ForcesEnergy (Kinetic and Potential)PotentialKinetic
Measures
Define WorkspaceDefine TargetsOptimize for... >Engineering Dimensions
Define ForceDefine TorqueCalculate ForceCalculate Torque

&RQFOXVLRQV
1. Rigorous Mathematical Methods for Ergonomics Analysis, Design, and Optimization.
2. Human Performance Measures as Cost Functions
3. Not Only Can Answer Whether a Design is Ergonomically Correct, But Can Respond With An Optimum Design
4. Ability to Augment onto JACK through a Unique Collaborative Agreement.