effect of electronically enhanced driver behavior on freeway traffic flow alain l. kornhauser...
TRANSCRIPT

Effect of Electronically Enhanced Driver Behavior on Freeway Traffic Flow
Alain L. Kornhauser
Professor, Operations Research & Financial EngineeringDirector, Transportation Research Program
Princeton University
Presented at 53rd Annual Meeting Transportation Research ForumTampa, FlMarch, 2012
Scott H. Chacon
Analyst, Wells Fargo Investment Banking
and

Overview
• Well known: congestion is made worse by variations in how drivers react to vehicles ahead– lane changing and as well
• Thus, augmenting Driver Behavior may improve Traffic Flow
• What can augment Driver Behavior:– Most near-term realizable Driver Behavior
augmentation is via intelligent cruise control– Already does it on low density freeways:
• Non-rigorous evidence that travel times have reduced for because speeds is constant

Overview
• Investigated: extent to which intelligent cruise control-type augmentation of driver behavior can improve traffic flow.
• Shown: if intelligent cruise control constrains vehicles from getting too close together, especially in stop and go traffic, the frequency of the formation of traffic shock waves is significantly reduced resulting in higher traffic flow and shorter travel times.• Compared are minimum time-headway and minimum separation intelligent
cruise control based augmentations of driver behavior.
• Also Identified: – the optimal minimum following distance– The reduction in travel time

Micro Simulation of Traffic Flow• Used is extended version of: http://www.traffic-simulation.de/
– Longitudinal behavior: Triber et al. (2000) Intelligent Driver Model (IDM)
– Lane change behavior: Kesting et al. (2007) Minimizing Overall Braking decelerations Induced by Lane-changes (MOBIL)
• Implemented over– 4-lane, 3,000 meter stretch of freeway in Pasadena, Ca.– Segment chosen because of the ready availability of
loop detector data from the Performance Measurement System (PeMS)
• Vehicle flow, occupancy and speed by lane in 4 locations plus entrance and off ramps

The Freeway Segment
• Eastbound I-210 Btwn Lake Blvd & N. Sierra Madre Blvd.– Loop Detectors in each of the 4 lanes before on-ramps @
• Lake Blvd., N. Hill Ave., N. Allen Ave & Sierra Madre Blvd.– On-ramp Loop Detectors @
• Lake, Hill and Sierra Madre– Off-ramp Loop Detectors @
• Hill, S. Altadena and Sierra Madre

Modification of Micro Simulation• Expanded to include
– 4 lanes (substantial addition)– Multiple on and off ramps (major addition)– Minimum following distance driver behavior augmentation– UI changes to allow:
• Switch between two simulations:– Use Observed Ramp Data
» Used for calibrating driver behavior so as to have simulation replicate the observed PeMS observations
– Set All Variable Manually» Ability to select values for 11 parameters
• Upstream in-flow, in-flow & out-flow at each ramp, lane-change politeness, speed of simulation and minimum allowable distance.
• Output plots of absolute and relative-to-observed flows in each lane at each station
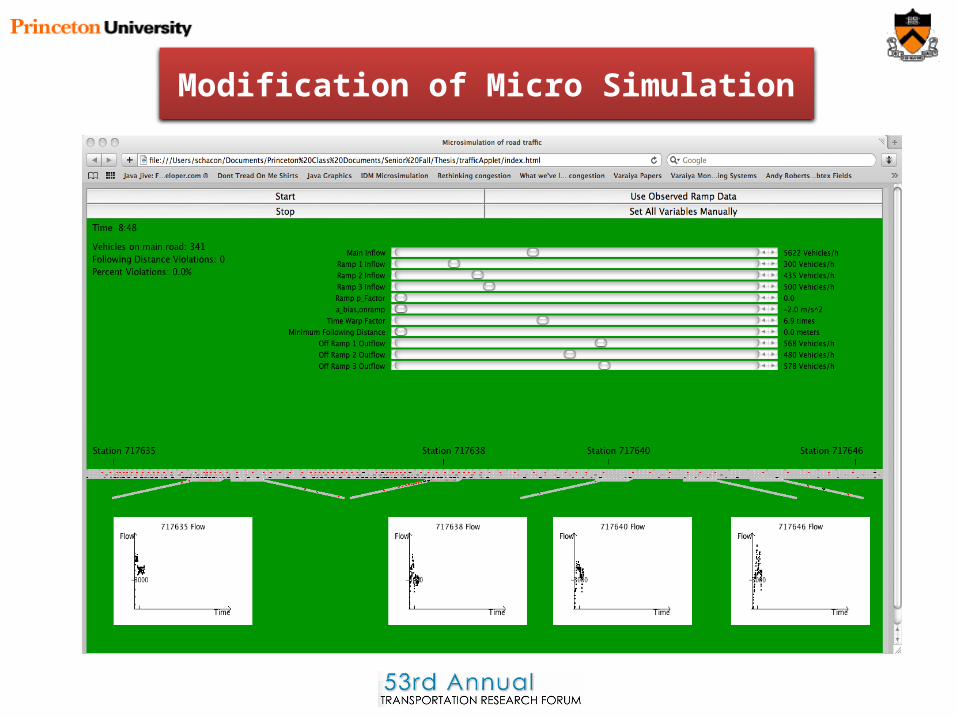
Modification of Micro Simulation

Calibration of Micro Simulation
• Done over a 24 hour period to match real data (Sept 22, 2008)
– Each new vehicle appropriately assigned a “destination” (off-ramp or continue on I-210)
– A right-bias incentive to change lanes behavior was added to exiting vehicles.
• Proportional to the number of lanes that need to be changed and nversely proportional to Distance-to-Exit
• Output– Driver behavior distributions for which
• simulated outflow ~ Actual outflow
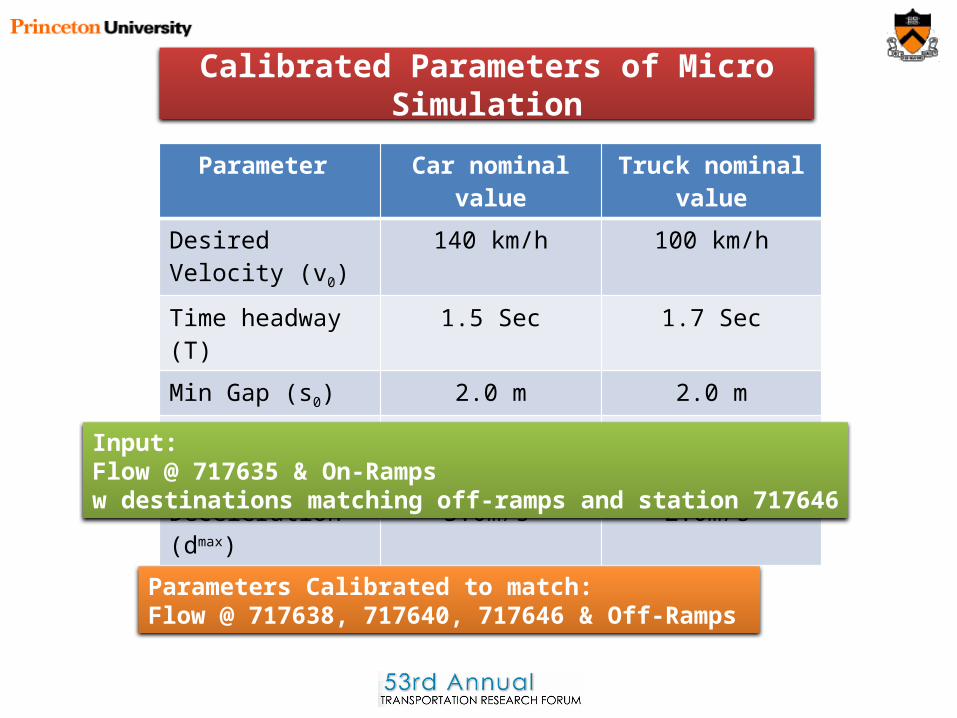
Calibrated Parameters of Micro Simulation
Parameter Car nominal value Truck nominal value
Desired Velocity (v0) 140 km/h 100 km/h
Time headway (T) 1.5 Sec 1.7 Sec
Min Gap (s0) 2.0 m 2.0 m
Acceleration (amax) 0.3 m/s2 0.3 m/s2
Deceleration (dmax) 3.0m/s2 2.0m/s2
Input:Flow @ 717635 & On-Ramps w destinations matching off-ramps and station 717646
Parameters Calibrated to match:Flow @ 717638, 717640, 717646 & Off-Ramps

Observed Flows
I-210
Hour of day Hour of day
Hour of day
Hour of day
Off-Ramp
On-Ramp

% Error in Flow
717638
Since Midnight
717640
Since Midnight
717646
Flow Implications of Cruise Control Augmentation of Driver Behavior
• Previous studies by Ionnou & Chien (1993) & Arem (2006) – Constant minimum time headway (min separation proportional to
distance ensuring safety) smoothes traffic flow and increases flow rate (in single lane)
• What about: Reliance on “normal” Driver Behavior; except, as it might encroach on some Minimum Separation constraint – Deceleration Behavior of closing vehicles (Vtrailing > Vleading; S > Smin)
Controlled by intelligent cruise controller so as to achieve a feedback-controlled minimum separation, S = Smin at Vtrailing = Vleading
– Smin = 0 is equivalent to zero augmentation of Driver Behavior, e.g. existing condition

Flow Improvement for various Separation Distance
• Average Flow Improvement at peak times over pure Driver Behavior (no augmentation)

Average Flow Improvement v Minimum Separation Distance
• Average Flow Improvement at peak times over pure Driver Behavior (no augmentation)
• Peak @ 10 meters

Improvement in Travel Time v Min Separation
• Cumulative Distributions of Travel time for all vehicles traveling the whole length (from 717635 to 717646)

• While simulation was done for only one freeway segment and only one day’s demand– Does indicate that augmenting driver behavior
using minimum separation does reduce the formation of shocks in the traffic flow.
Conclusions

Thank You